## Environment Mapping and Representation
### Overview
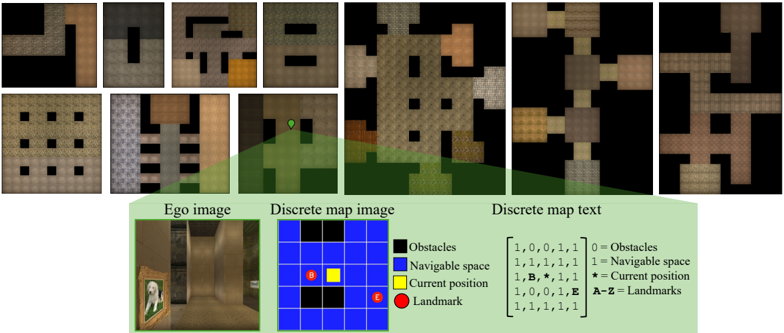
The image presents a collection of environment maps and representations, including top-down views of maze-like structures, an ego-centric image, a discrete map image, and a discrete map text representation. The image demonstrates different ways to represent the same environment for navigation and understanding.
### Components/Axes
* **Top-Down Maze Views:** A series of images showing maze-like environments from a top-down perspective. These views vary in complexity and layout.
* **Ego Image:** A first-person perspective image showing a hallway with a painting on the wall.
* **Discrete Map Image:** A grid-based representation of an environment, with color-coded elements:
* Black: Obstacles
* Blue: Navigable space
* Yellow: Current position
* Red: Landmark
* **Discrete Map Text:** A matrix of numerical and symbolic values representing the environment:
* 0: Obstacles
* 1: Navigable space
* \*: Current position
* A-Z: Landmarks
### Detailed Analysis
* **Top-Down Maze Views:** These views provide a global understanding of the environment's layout. The mazes vary in structure, some with clear pathways and others with more complex, interconnected routes.
* **Ego Image:** This image provides a realistic, first-person view of the environment. It shows a hallway with a painting, giving a sense of depth and visual detail.
* **Discrete Map Image:** The grid shows a 5x5 map. The current position is in the center. There is a landmark 'E' in the bottom right and a landmark 'B' in the top left.
* **Discrete Map Text:** The text representation corresponds to the discrete map image. The matrix is:
```
[1, 0, 0, 1, 1]
[1, 1, 1, 1, 1]
[1, B, *, 1, 1]
[1, 0, 0, 1, E]
[1, 1, 1, 1, 1]
```
### Key Observations
* The image demonstrates different levels of abstraction in environment representation, from realistic images to simplified grid-based maps and numerical matrices.
* The discrete map image and text provide a compact and structured way to represent the environment for computational purposes.
* The ego image provides a realistic view that can be used for visual navigation and landmark recognition.
### Interpretation
The image illustrates the concept of environment mapping and representation, which is crucial in robotics, autonomous navigation, and game development. The different representations serve different purposes: the top-down views provide a global understanding, the ego image provides a realistic view, and the discrete map provides a structured representation for computation. The discrete map text is a machine-readable format that can be used by algorithms to plan paths and navigate the environment. The combination of these representations allows for a comprehensive understanding of the environment, enabling intelligent agents to navigate and interact with it effectively.