## Diagram: Navigation System Representation
### Overview
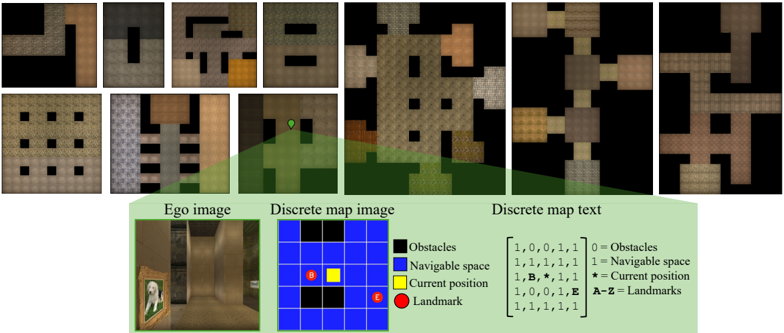
The image depicts a multi-layered representation of a navigation system, combining visual, spatial, and textual elements. It includes an "Ego image" (a room with a painting), a "Discrete map image" (a grid with color-coded regions), and a "Discrete map text" (a matrix with numerical and symbolic data). The system uses color-coded legends to differentiate obstacles, navigable space, current position, and landmarks.
### Components/Axes
1. **Ego Image**
- A room with a painting of a dog on the left wall.
- No explicit axes or scales, but spatial relationships are implied (e.g., the painting is on the left wall).
2. **Discrete Map Image**
- A 5x5 grid with color-coded regions:
- **Black**: Obstacles (e.g., walls, barriers).
- **Blue**: Navigable space.
- **Yellow**: Current position (marked as "B").
- **Red**: Landmark (marked as "E").
- Legend: Located at the bottom-right corner of the grid.
3. **Discrete Map Text**
- A 5x5 matrix with binary values (0s and 1s) and symbols:
- **0**: Obstacles.
- **1**: Navigable space.
- **B**: Current position.
- **E**: Landmark.
- Legend: Located at the bottom-right corner of the matrix.
### Detailed Analysis
- **Grid and Matrix Alignment**:
- The grid and matrix share the same spatial structure. For example:
- The current position "B" in the grid (yellow square) corresponds to the "B" in the matrix at position (1,1).
- The landmark "E" in the grid (red circle) corresponds to the "E" in the matrix at position (4,4).
- Obstacles (black in the grid, 0s in the matrix) are consistently placed.
- **Color Legend Consistency**:
- **Black** (obstacles) matches in both the grid and matrix.
- **Blue** (navigable space) is the dominant color in both.
- **Yellow** (current position) and **Red** (landmark) are uniquely marked in both representations.
- **Spatial Grounding**:
- The legend for the grid is positioned at the bottom-right corner of the grid.
- The legend for the matrix is positioned at the bottom-right corner of the matrix.
- The "Ego image" is placed above the grid and matrix, with a green arrow pointing to the grid, suggesting a connection between the physical environment and the abstract map.
### Key Observations
1. **Consistency Between Visual and Textual Representations**:
- The grid and matrix are perfectly aligned in terms of spatial relationships (e.g., obstacles, current position, and landmark).
- The use of "B" and "E" in the matrix mirrors the color-coded markers in the grid.
2. **Legend Placement**:
- Both legends are positioned at the bottom-right of their respective sections, ensuring clarity and accessibility.
3. **Navigation Context**:
- The system appears designed for pathfinding or robotics, where the grid/matrix represents a simplified environment, and the ego image provides a real-world reference.
### Interpretation
This diagram illustrates a **multi-modal navigation system** that bridges physical environments (ego image) with abstract spatial data (grid and matrix). The color-coded legend ensures unambiguous interpretation of obstacles, navigable paths, and key points (current position and landmark). The alignment between the grid and matrix suggests a system where visual and textual data are synchronized for tasks like autonomous navigation or spatial reasoning.
- **Notable Patterns**:
- The current position ("B") is near the top-left of the grid, while the landmark ("E") is near the bottom-right, indicating a potential path from start to goal.
- Obstacles are concentrated in the top-left and bottom-right corners, creating a navigable corridor through the center.
- **Underlying Logic**:
- The use of binary values (0s and 1s) in the matrix simplifies the environment for computational processing, while the grid provides a human-readable visual.
- The legend acts as a critical bridge between the two representations, ensuring accurate interpretation of spatial data.
- **Anomalies**:
- No explicit anomalies are present; the system appears logically consistent.
This representation is likely part of a larger framework for AI-driven navigation, where the ego image serves as input, and the grid/matrix enables algorithmic path planning.