## Diagram: Robot Task Analysis
### Overview
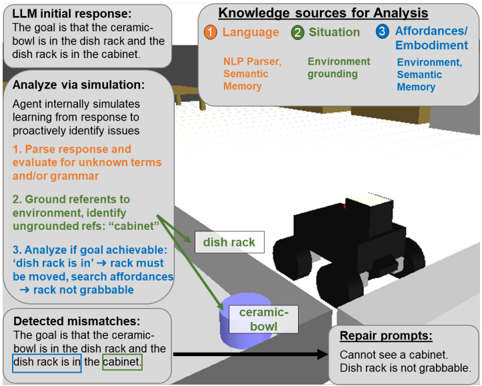
The image presents a diagram illustrating a robot's task analysis process, specifically focusing on how the robot identifies and addresses mismatches between its initial understanding of a goal and the actual environment. The diagram includes the robot's initial response, the analysis process, detected mismatches, and repair prompts, all within the context of a simulated environment containing a ceramic bowl, dish rack, and a robot.
### Components/Axes
* **LLM initial response:** (Top-left)
* Text: "The goal is that the ceramic-bowl is in the dish rack and the dish rack is in the cabinet."
* **Analyze via simulation:** (Left, below initial response)
* Text: "Agent internally simulates learning from response to proactively identify issues"
* Numbered steps:
1. "Parse response and evaluate for unknown terms and/or grammar"
2. "Ground referents to environment, identify ungrounded refs: 'cabinet'"
3. "Analyze if goal achievable: 'dish rack is in' -> rack must be moved, search affordances -> rack not grabbable"
* **Detected mismatches:** (Bottom-left)
* Text: "The goal is that the ceramic-bowl is in the dish rack and the dish rack is in the cabinet."
* The words "bowl", "dish rack", and "cabinet" are highlighted with blue and green boxes.
* **Knowledge sources for Analysis:** (Top-right)
* Numbered list:
1. Language: NLP Parser, Semantic Memory
2. Situation: Environment grounding
3. Affordances/Embodiment: Environment, Semantic Memory
* **Environment:** (Center-right)
* A simulated environment showing a black robot, a blue ceramic bowl, and a dish rack.
* **Labels in Environment:**
* "dish rack" - Label pointing to the dish rack.
* "ceramic-bowl" - Label pointing to the ceramic bowl.
* **Repair prompts:** (Bottom-right)
* Text: "Cannot see a cabinet. Dish rack is not grabbable."
* **Arrows:**
* A green arrow points from step 2 of "Analyze via simulation" to the dish rack.
* A black arrow points from the ceramic bowl to the "Repair prompts" box.
### Detailed Analysis
* **LLM Initial Response:** The robot's initial understanding of the task is based on a language model's response. The goal is to place the ceramic bowl in the dish rack, which is in the cabinet.
* **Analyze via Simulation:** The robot simulates the task internally to identify potential issues. This involves parsing the response, grounding referents in the environment, and analyzing if the goal is achievable.
* **Detected Mismatches:** The robot detects mismatches between the initial goal and the environment. The words "bowl", "dish rack", and "cabinet" are highlighted, indicating potential issues with these elements.
* **Knowledge Sources:** The robot uses three knowledge sources for analysis: language, situation, and affordances/embodiment. These sources provide information about the task, the environment, and the robot's capabilities.
* **Environment:** The simulated environment provides a visual representation of the task. The robot, ceramic bowl, and dish rack are all visible.
* **Repair Prompts:** Based on the analysis, the robot generates repair prompts to address the identified mismatches. In this case, the robot cannot see a cabinet and the dish rack is not grabbable.
### Key Observations
* The robot's task analysis process involves multiple steps, including parsing, grounding, and analysis.
* The robot uses a variety of knowledge sources to inform its analysis.
* The robot is able to identify mismatches between its initial understanding of the goal and the environment.
* The robot generates repair prompts to address the identified mismatches.
### Interpretation
The diagram illustrates a crucial aspect of robot task execution: the ability to analyze and adapt to discrepancies between planned actions and the real world. The robot's initial understanding, derived from a language model, is tested against its perception of the environment. The "Analyze via simulation" section highlights the importance of internal modeling and reasoning. The detected mismatches and repair prompts demonstrate the robot's capacity to identify and address problems, such as the absence of a cabinet or the inability to grasp the dish rack. This process is essential for robust and reliable robot performance in complex and dynamic environments. The diagram emphasizes the interplay between language understanding, environmental perception, and embodied action in achieving a given goal.