\n
## Diagram: Robotic Task Analysis & Knowledge Sources
### Overview
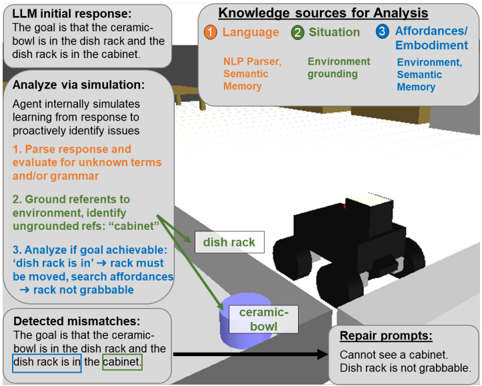
This diagram illustrates a robotic task analysis scenario, focusing on how a robot processes information to achieve a goal. The goal is to place a ceramic bowl in a dish rack, which is then to be placed in a cabinet. The diagram depicts the robot's internal processes, knowledge sources, and detected mismatches between the initial goal and the environment. It also shows repair prompts generated by the robot.
### Components/Axes
The diagram is divided into several key sections:
* **Header:** "Knowledge sources for Analysis" with three numbered categories: 1. Language, 2. Situation, 3. Affordances/Embodiment.
* **Central Image:** A 3D rendering of a robot, a ceramic bowl, and a dish rack within a simulated environment.
* **Left Side:** A block of text outlining the analysis process, broken down into numbered steps.
* **Bottom-Left:** "Detected mismatches" with a repeated statement of the initial goal.
* **Bottom-Right:** "Repair prompts" listing issues encountered.
The header categories are color-coded:
* 1. Language: Yellow
* 2. Situation: Blue
* 3. Affordances/Embodiment: Green
Each category has associated keywords:
* Language: NLP Parser, Semantic Memory
* Situation: Environment grounding
* Affordances/Embodiment: Environment, Semantic Memory
### Detailed Analysis or Content Details
**Header - Knowledge Sources:**
* **1. Language (Yellow):** Utilizes an NLP Parser and Semantic Memory.
* **2. Situation (Blue):** Relies on Environment grounding.
* **3. Affordances/Embodiment (Green):** Uses Environment and Semantic Memory.
**Left Side - Analysis Process:**
1. "Analyze via simulation: Agent internally simulates learning from response to proactively identify issues."
2. "Parse response and evaluate for unknown terms and/or grammar."
3. "Ground referents to environment, identify ungrounded refs: “cabinet”"
4. "Analyze if goal achievable: ‘dish rack is in’ -> rack must be moved, search affordances -> rack not grabbable"
**Central Image - Object Labels:**
* "dish rack" - Label pointing to the dish rack object.
* "ceramic-bowl" - Label pointing to the ceramic bowl object.
**Bottom-Left - Detected Mismatches:**
* "The goal is that the ceramic-bowl is in the dish rack and the dish rack is in the cabinet." (This statement is repeated, with the initial goal highlighted in a green box).
**Bottom-Right - Repair Prompts:**
* "Cannot see a cabinet."
* "Dish rack is not grabbable."
**LLM Initial Response (Top-Left):**
* "The goal is that the ceramic-bowl is in the dish rack and the dish rack is in the cabinet."
### Key Observations
* The robot is attempting a task that requires understanding of language, the environment, and physical capabilities.
* The robot identifies a key issue: the absence of a cabinet in its perceived environment.
* The robot also determines that the dish rack is not grabbable, indicating a limitation in its manipulation capabilities or a problem with the object's properties.
* The diagram highlights the importance of grounding language references (like "cabinet") to the physical environment.
* The analysis process involves simulation to proactively identify potential issues.
### Interpretation
This diagram demonstrates a complex robotic task planning and execution process. The robot doesn't simply execute commands; it actively analyzes the situation, identifies potential problems, and generates repair prompts. The use of multiple knowledge sources (Language, Situation, Affordances/Embodiment) is crucial for successful task completion.
The detected mismatches reveal the challenges of robotic perception and manipulation. The robot's inability to find a cabinet suggests a limitation in its environmental understanding, while the inability to grab the dish rack points to a problem with its physical interaction capabilities.
The diagram illustrates a cycle of planning, execution, and refinement. The robot's initial goal is challenged by the environment, leading to the generation of repair prompts that can be used to adjust the plan or request assistance. This iterative process is essential for robust and adaptable robotic behavior. The diagram is a visual representation of a cognitive architecture for robotics, showing how different modules interact to achieve a goal.