\n
## Diagram: Lean Copilot System Architecture
### Overview
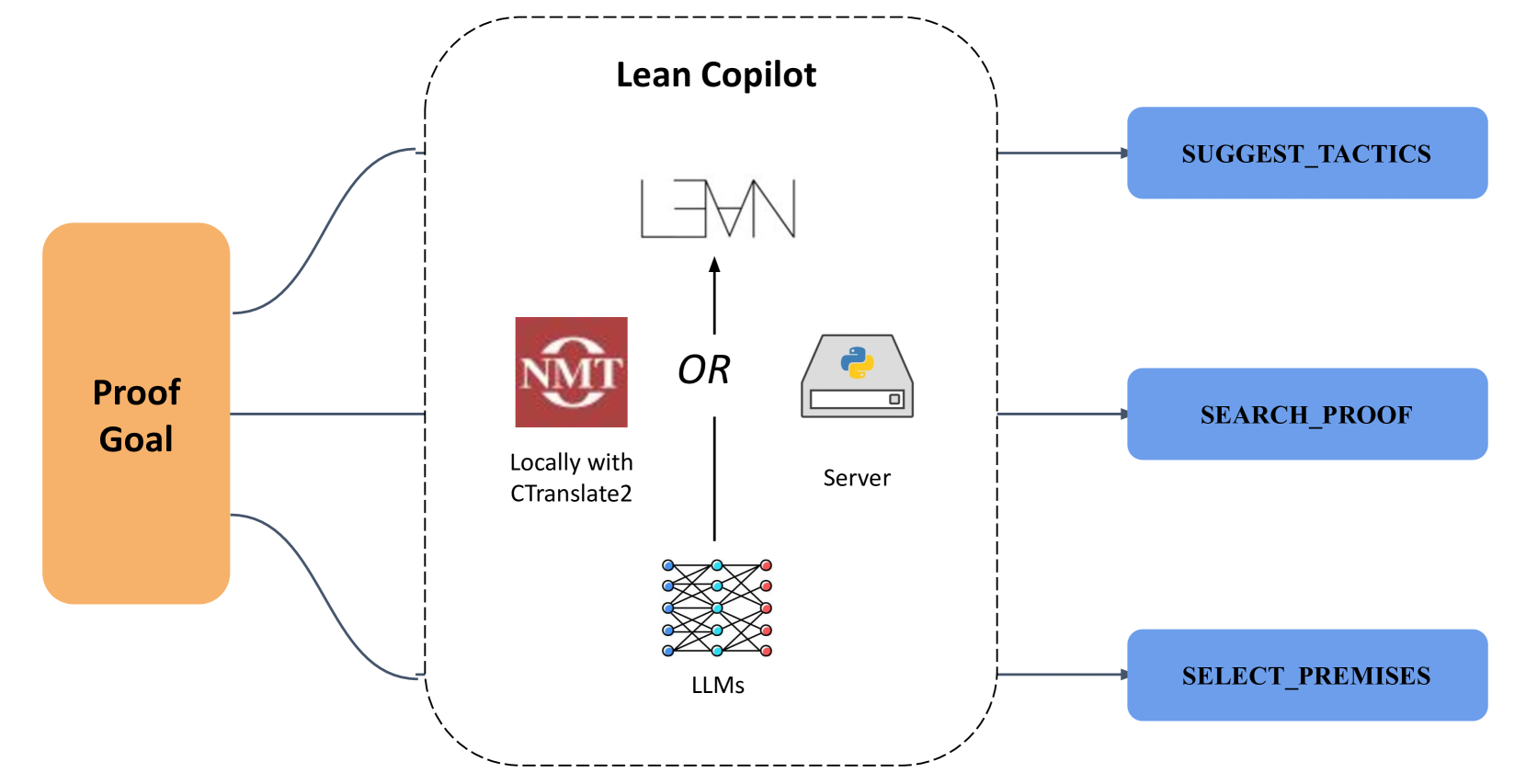
The image depicts a diagram illustrating the architecture of a "Lean Copilot" system. The system takes a "Proof Goal" as input and outputs three actions: "SUGGEST_TACTICS", "SEARCH_PROOF", and "SELECT_PREMISES". The core of the system, labeled "LEVN", utilizes either a locally run Neural Machine Translation (NMT) model with CTranslate2 or a server-based implementation, and Large Language Models (LLMs).
### Components/Axes
The diagram consists of the following components:
* **Proof Goal:** An input element represented as a rounded rectangle, colored yellow.
* **Lean Copilot:** A dashed-border rectangle encompassing the core system.
* **LEVN:** The central processing unit within the Lean Copilot, labeled in a stylized font.
* **NMT:** A circular element representing Neural Machine Translation, colored red. Text within: "NMT". Subtext: "Locally with CTranslate2".
* **Server:** A rectangular element representing a server, colored light blue, with a monitor icon.
* **LLMs:** A network-like element representing Large Language Models, colored purple and red.
* **SUGGEST_TACTICS:** An output element represented as a rounded rectangle, colored orange.
* **SEARCH_PROOF:** An output element represented as a rounded rectangle, colored dark blue.
* **SELECT_PREMISES:** An output element represented as a rounded rectangle, colored light blue.
* **Arrows:** Indicate the flow of information between components.
### Detailed Analysis or Content Details
The diagram shows a unidirectional flow of information.
1. **Input:** The "Proof Goal" feeds into the "LEVN" component.
2. **LEVN Processing:** "LEVN" can utilize either the "NMT" model (running locally with CTranslate2) *or* a "Server" implementation. Both options connect to "LLMs".
3. **Outputs:** "LEVN" then outputs to three separate actions:
* "SUGGEST_TACTICS"
* "SEARCH_PROOF"
* "SELECT_PREMISES"
The "NMT" component is positioned to the left of the "LEVN" component, with the text "OR" indicating an alternative pathway through the "Server" component. The "LLMs" component is positioned below the "LEVN" component, and both the "NMT" and "Server" components connect to it. The three output components are positioned to the right of the "LEVN" component.
### Key Observations
The diagram highlights a modular architecture where the core processing ("LEVN") can leverage different implementations (local NMT or server-based) while still utilizing LLMs. The three output actions suggest a system designed to assist in proof development by suggesting tactics, searching for relevant proofs, and selecting appropriate premises.
### Interpretation
This diagram illustrates a system designed to automate or assist in the process of formal proof construction. The "Lean Copilot" acts as an intelligent assistant, taking a "Proof Goal" and providing suggestions for how to proceed. The choice between local NMT and a server-based implementation suggests a trade-off between latency and resource requirements. The use of LLMs indicates that the system leverages the power of large language models for tasks such as understanding the proof goal, generating tactics, and searching for relevant proofs. The three output actions – suggesting tactics, searching for proofs, and selecting premises – represent the key steps in a typical proof development workflow. The diagram suggests a system that aims to streamline and accelerate the process of formal verification.