## Code Snippet: Python Function for Tensor Basis Coefficient Prediction
### Overview
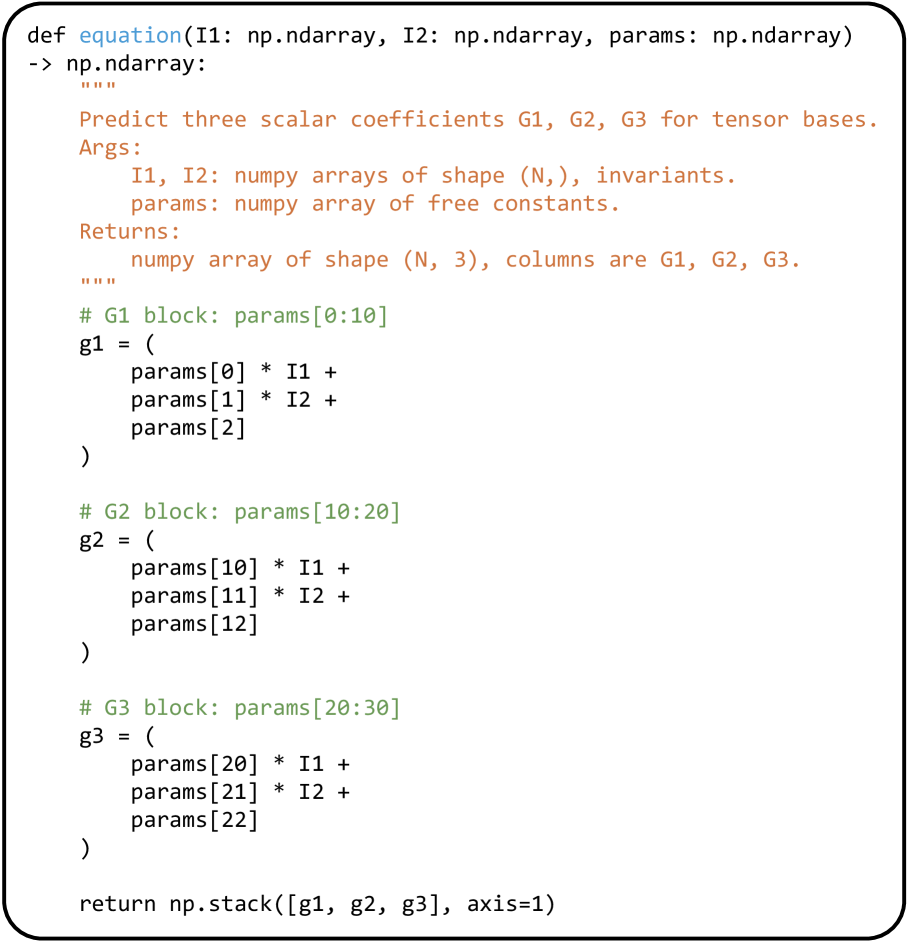
The image displays a Python function definition named `equation`. The function is designed to compute three scalar coefficients (G1, G2, G3) for tensor bases, given two invariant arrays and a set of free parameters. The code is presented in a monospaced font with syntax highlighting (blue for the function name, green for comments, orange for the docstring, and black for the main code body) against a white background, enclosed within a rounded black border.
### Components/Axes
* **Function Signature:** `def equation(I1: np.ndarray, I2: np.ndarray, params: np.ndarray) -> np.ndarray:`
* **Docstring:** A multi-line string explaining the function's purpose, arguments, and return value.
* **Code Blocks:** Three distinct computation blocks for `g1`, `g2`, and `g3`, each preceded by a comment indicating the parameter slice used.
* **Return Statement:** A final line that stacks the three computed arrays.
### Detailed Analysis
The function's logic is structured as follows:
1. **Function Definition & Docstring:**
* **Purpose:** "Predict three scalar coefficients G1, G2, G3 for tensor bases."
* **Arguments:**
* `I1, I2`: Described as "numpy arrays of shape (N,), invariants."
* `params`: Described as a "numpy array of free constants."
* **Returns:** A "numpy array of shape (N, 3), columns are G1, G2, G3."
2. **G1 Block (Comment: `# G1 block: params[0:10]`):**
* Computes `g1` as a linear combination: `params[0] * I1 + params[1] * I2 + params[2]`.
* **Note:** The comment indicates this block uses parameters from index 0 to 9 (`params[0:10]`), but the visible code only explicitly uses indices 0, 1, and 2. The remaining parameters (3-9) are not utilized in the shown snippet.
3. **G2 Block (Comment: `# G2 block: params[10:20]`):**
* Computes `g2` as: `params[10] * I1 + params[11] * I2 + params[12]`.
* **Note:** The comment indicates this block uses parameters from index 10 to 19 (`params[10:20]`), but the visible code only explicitly uses indices 10, 11, and 12. The remaining parameters (13-19) are not utilized in the shown snippet.
4. **G3 Block (Comment: `# G3 block: params[20:30]`):**
* Computes `g3` as: `params[20] * I1 + params[21] * I2 + params[22]`.
* **Note:** The comment indicates this block uses parameters from index 20 to 29 (`params[20:30]`), but the visible code only explicitly uses indices 20, 21, and 22. The remaining parameters (23-29) are not utilized in the shown snippet.
5. **Return Statement:**
* `return np.stack([g1, g2, g3], axis=1)`
* This stacks the three 1D arrays (`g1`, `g2`, `g3`) as columns into a single 2D array of shape `(N, 3)`.
### Key Observations
* **Linear Model:** Each coefficient (G1, G2, G3) is computed using an identical linear model structure: `a*I1 + b*I2 + c`, where `a`, `b`, and `c` are parameters from the `params` array.
* **Parameter Slicing Discrepancy:** There is a clear mismatch between the parameter ranges stated in the comments (`params[0:10]`, `params[10:20]`, `params[20:30]`) and the number of parameters actually used in the code (3 per block, indices 0-2, 10-12, 20-22). This suggests the code snippet may be incomplete or a simplified example.
* **Modular Design:** The function is cleanly divided into three independent computation blocks, one for each output coefficient, which enhances readability.
* **Type Hints:** The function uses type hints (`np.ndarray`) for arguments and return value, indicating it is part of a codebase that values type clarity.
### Interpretation
This code snippet defines a core computational kernel, likely for a scientific or engineering simulation involving tensor analysis. The function `equation` serves as a **parameterized linear model** that maps two input invariants (`I1`, `I2`) to three output coefficients (`G1`, `G2`, `G3`). These coefficients are presumably used to weight basis tensors in a constitutive model (e.g., for material stress-strain relationships).
The key insight is that the model's behavior is entirely controlled by the 30-element `params` array (as implied by the comments). The function itself is a fixed, differentiable transformation. The "learning" or "fitting" process would involve optimizing the values within `params` to match experimental or high-fidelity simulation data. The discrepancy between the comment ranges and used indices is a critical point for a developer; it indicates either a bug, a placeholder for future expansion, or that this is a pedagogical example showing only the first few parameters of each block. The function's output shape `(N, 3)` is designed for efficient vectorized computation over `N` data points.