## Diagram: Autonomous Vehicle Sensor Placement
### Overview
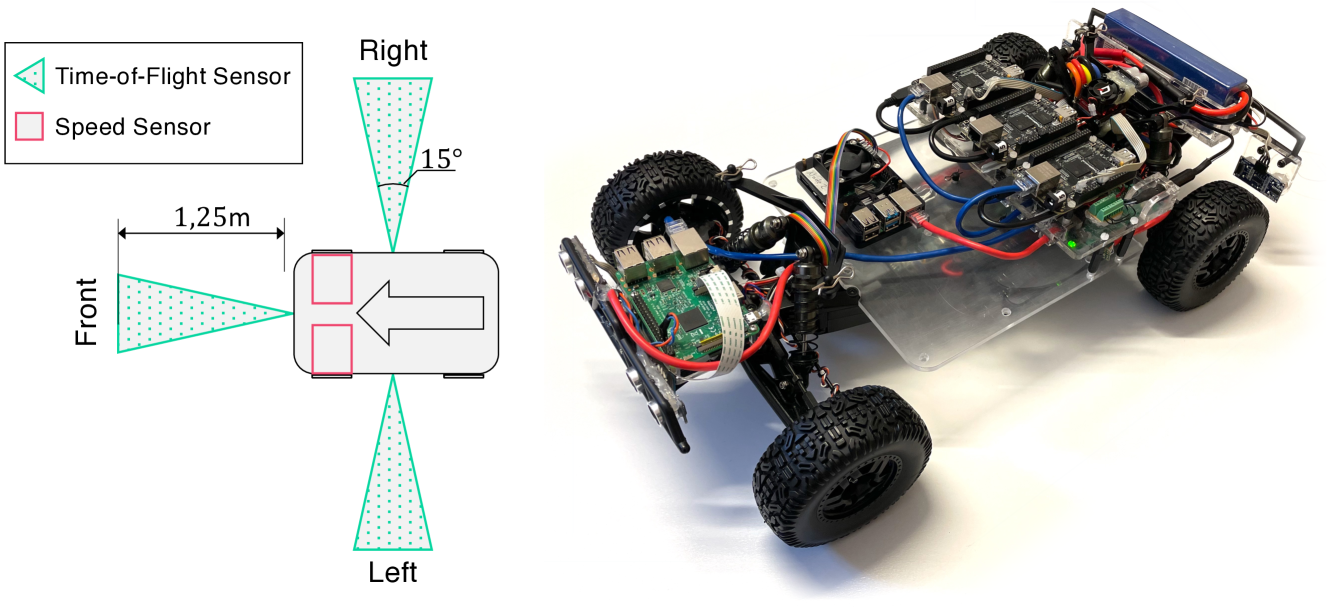
The image shows a diagram of an autonomous vehicle with sensor placements, alongside a photograph of the actual vehicle. The diagram illustrates the positioning of Time-of-Flight sensors and Speed sensors on the vehicle. The photograph provides a view of the vehicle's hardware components.
### Components/Axes
* **Legend (Top-Left)**:
* Green Triangle: Time-of-Flight Sensor
* Red Rectangle: Speed Sensor
* **Vehicle Diagram**:
* Direction: Indicated by a white arrow pointing forward.
* Front: Labeled on the left side of the vehicle diagram.
* Right: Labeled above the right side Time-of-Flight sensor.
* Left: Labeled below the left side Time-of-Flight sensor.
* **Measurements**:
* Distance between front Time-of-Flight sensor and the front of the vehicle: 1.25m
* Angle of the right Time-of-Flight sensor: 15 degrees.
### Detailed Analysis or ### Content Details
* **Time-of-Flight Sensors**:
* Front: One green triangle indicating a Time-of-Flight sensor pointing forward.
* Right: One green triangle indicating a Time-of-Flight sensor pointing to the right at a 15-degree angle.
* Left: One green triangle indicating a Time-of-Flight sensor pointing to the left.
* **Speed Sensors**:
* Two red rectangles on the rear of the vehicle, indicating the placement of speed sensors.
* **Vehicle Photograph**:
* Shows the physical construction of the autonomous vehicle, including the chassis, wheels, and electronic components (Raspberry Pi boards, etc.).
### Key Observations
* The diagram provides a clear overview of the sensor placement strategy on the autonomous vehicle.
* The photograph gives a realistic view of the vehicle's hardware setup.
* The Time-of-Flight sensors are positioned to provide distance measurements in the front, left, and right directions.
* The Speed sensors are located at the rear of the vehicle.
### Interpretation
The image illustrates the sensor configuration of an autonomous vehicle, combining a schematic diagram with a real-world photograph. The Time-of-Flight sensors enable the vehicle to perceive its surroundings by measuring distances, while the Speed sensors provide information about the vehicle's movement. The 15-degree angle of the right Time-of-Flight sensor suggests a specific design choice for obstacle detection or navigation. The combination of these sensors allows the vehicle to navigate autonomously by perceiving its environment and controlling its movement.