## Diagram: Traffic Light Decision Model with Logical Conditions
### Overview
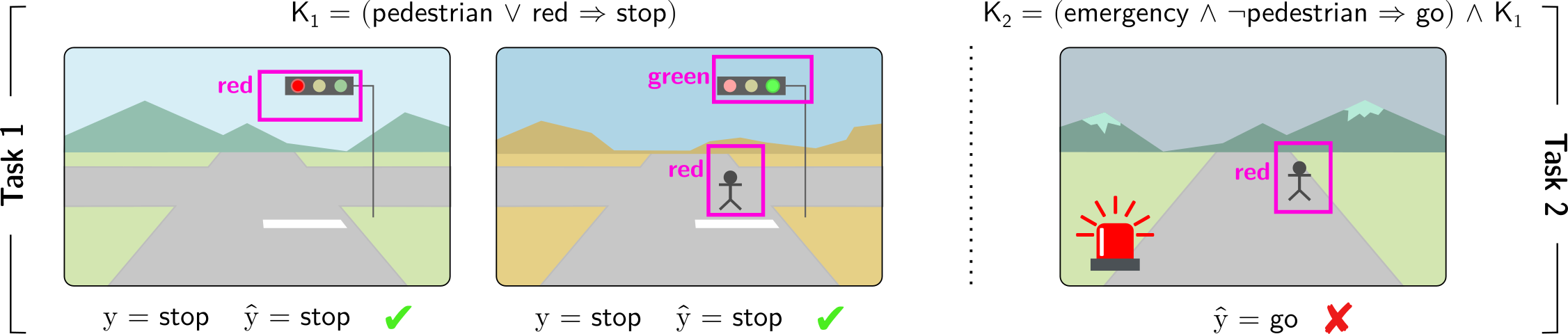
The diagram illustrates a decision-making model for traffic light control under varying conditions, comparing actual outcomes (`y`) with predicted outcomes (`ŷ`). It uses logical expressions (`K₁`, `K₂`) to define rules and evaluates their correctness with checkmarks (✓) or crosses (✗). Three scenarios are depicted: two under Task 1 and one under Task 2.
---
### Components/Axes
1. **Task 1 (Left Section)**:
- **Panel 1**:
- Traffic light: Red (highlighted in pink box).
- Pedestrian symbol (black stick figure) on the road.
- Logical condition: `K₁ = (pedestrian ∨ red ⇒ stop)`.
- Output: `y = stop` (actual), `ŷ = stop` (predicted), marked with ✓.
- **Panel 2**:
- Traffic light: Green (highlighted in pink box).
- Pedestrian symbol on the road.
- Logical condition: `K₂ = (emergency ∧ ¬pedestrian ⇒ go) ∧ K₁`.
- Output: `y = stop` (actual), `ŷ = stop` (predicted), marked with ✓.
2. **Task 2 (Right Section)**:
- Traffic light: Red (highlighted in pink box).
- Pedestrian symbol on the road.
- Emergency light: Red siren (highlighted in pink box) at the bottom-left.
- Logical condition: `K₂ = (emergency ∧ ¬pedestrian ⇒ go) ∧ K₁`.
- Output: `ŷ = go` (predicted), marked with ✗.
---
### Detailed Analysis
- **Task 1**:
- **Panel 1**: The model correctly predicts `stop` when a pedestrian is present with a red light, aligning with `K₁`.
- **Panel 2**: Despite the green light, the presence of a pedestrian triggers `K₂`, which overrides the default behavior (due to the `∧ K₁` clause), resulting in a correct `stop` prediction.
- **Task 2**:
- The model incorrectly predicts `go` when an emergency light and pedestrian are present. This contradicts `K₂`, which should prioritize `stop` if `K₁` is active. The error suggests a conflict in rule prioritization or edge-case handling.
---
### Key Observations
1. **Rule Conflicts**: Task 2 reveals a failure in handling overlapping conditions (`emergency` and `pedestrian`), where `K₂` should enforce `stop` but instead predicts `go`.
2. **Logical Structure**: `K₁` governs basic pedestrian/red-light scenarios, while `K₂` introduces emergency exceptions but fails to resolve conflicts.
3. **Visual Cues**: Checkmarks (✓) and crosses (✗) directly indicate prediction accuracy, emphasizing the model's limitations.
---
### Interpretation
The diagram highlights a critical flaw in the decision logic: while `K₁` and `K₂` are designed to handle pedestrian and emergency scenarios, their interaction in Task 2 leads to an incorrect prediction. The emergency light (`K₂`) should ideally override normal rules, but the presence of a pedestrian (`K₁`) creates ambiguity. This suggests the need for refined logical operators (e.g., prioritizing `emergency` over `pedestrian` in `K₂`) or additional conditions to resolve conflicts. The model's inability to adapt to overlapping constraints underscores the importance of explicit rule hierarchies in safety-critical systems.