## Image Sequence: Robotic Arm Manipulation
### Overview
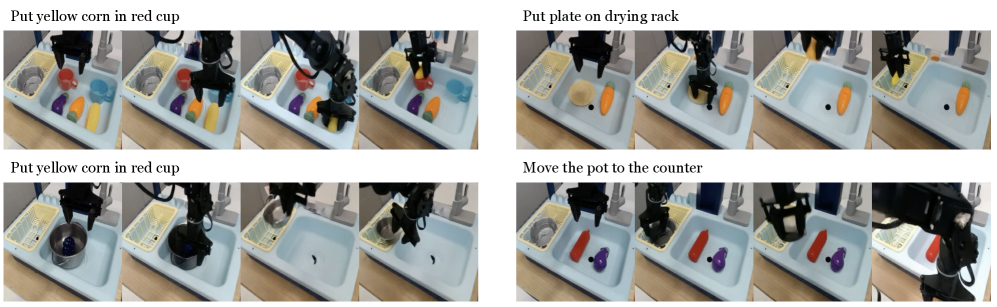
The image shows a sequence of actions performed by a robotic arm in a simulated kitchen environment. Each action is depicted in two frames, showing the "before" and "after" states of the manipulation. The actions involve moving toy objects within the sink area.
### Components/Axes
* **Environment:** A toy kitchen sink with a drying rack and a counter area.
* **Objects:** Various toy items including a yellow corn, red cup, plate, carrot, pot, and other vegetables.
* **Robotic Arm:** A black robotic arm with a gripper.
* **Text Labels:** Each action is labeled with a text description above the corresponding image sequence.
### Detailed Analysis
The image is divided into four sections, each showing a different action.
1. **Put yellow corn in red cup:**
* The first frame shows a yellow corn and a red cup on the left side of the sink.
* The second frame shows the yellow corn placed inside the red cup.
2. **Put plate on drying rack:**
* The first frame shows a plate and a carrot in the sink.
* The second frame shows the plate placed on the drying rack.
3. **Put yellow corn in red cup:**
* The first frame shows a pot in the sink.
* The second frame shows the pot placed in the drying rack.
4. **Move the pot to the counter:**
* The first frame shows a red object and a purple object in the sink.
* The second frame shows the pot moved to the counter area.
### Key Observations
* The robotic arm successfully manipulates the objects as described in the text labels.
* The actions are simple pick-and-place tasks.
* The environment is a controlled, simulated setting.
### Interpretation
The image demonstrates the capability of a robotic arm to perform basic manipulation tasks in a kitchen environment. The sequence of actions suggests a programmed routine or a learning process where the robot is trained to interact with objects and perform specific tasks. The simplicity of the tasks indicates a focus on fundamental manipulation skills.