\n
## Photographic Sequence: Robotic Arm Task Demonstration
### Overview
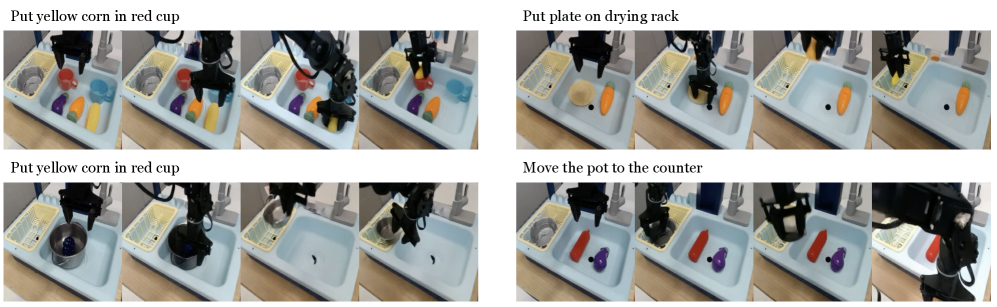
The image is a composite of four distinct photographic sequences, arranged in a 2x2 grid. Each sequence documents a robotic arm performing a specific manipulation task within a simulated kitchen sink environment. The sequences are labeled with descriptive titles. The environment consists of a light blue sink basin, a wooden countertop, a yellow dish rack, and various colorful, toy-like objects (cups, plates, pots, and food-shaped items).
### Components/Axes
* **Layout:** Four separate image sequences, each containing 3-4 frames showing progressive steps of a task.
* **Titles (Text Labels):**
* Top-Left Sequence: "Put yellow corn in red cup"
* Top-Right Sequence: "Put plate on drying rack"
* Bottom-Left Sequence: "Put yellow corn in red cup" (Note: This title is identical to the top-left, but the objects and task differ.)
* Bottom-Right Sequence: "Move the pot to the counter"
* **Key Objects:**
* **Robotic Arm:** A black, multi-jointed robotic arm with a gripper, present in all frames.
* **Sink:** A light blue, rectangular basin.
* **Dish Rack:** A yellow, grid-like rack positioned to the left of the sink.
* **Countertop:** A light wood-grain surface surrounding the sink.
* **Manipulable Objects:** Various colored items including a red cup, a blue cup, a yellow corn-shaped object, a purple eggplant-shaped object, an orange carrot-shaped object, a white plate, and a silver pot.
### Detailed Analysis
**Sequence 1 (Top-Left): "Put yellow corn in red cup"**
* **Frame 1:** The robotic arm is positioned above the sink. Inside the sink are a red cup, a blue cup, a yellow corn object, and a purple eggplant object.
* **Frame 2:** The gripper has grasped the yellow corn object.
* **Frame 3:** The arm moves the yellow corn over the red cup.
* **Frame 4:** The yellow corn is released and placed inside the red cup. The task is complete.
**Sequence 2 (Top-Right): "Put plate on drying rack"**
* **Frame 1:** The robotic arm is above the sink. A white plate and an orange carrot object are in the sink.
* **Frame 2:** The gripper has grasped the white plate.
* **Frame 3:** The arm moves the plate to the left, over the yellow dish rack.
* **Frame 4:** The plate is placed onto the dish rack. The carrot remains in the sink.
**Sequence 3 (Bottom-Left): "Put yellow corn in red cup" (Title Discrepancy)**
* **Frame 1:** The robotic arm is above the sink. A silver pot and a blue cup are in the sink. **No yellow corn or red cup is visible.**
* **Frame 2:** The gripper has grasped the silver pot.
* **Frame 3:** The arm moves the pot over the blue cup.
* **Frame 4:** The pot is placed inside the blue cup. The title does not match the observed action.
**Sequence 4 (Bottom-Right): "Move the pot to the counter"**
* **Frame 1:** The robotic arm is above the sink. A red cup, a purple eggplant, and a silver pot are in the sink.
* **Frame 2:** The gripper has grasped the silver pot.
* **Frame 3:** The arm moves the pot to the right, out of the sink and over the wooden countertop.
* **Frame 4:** The pot is placed on the countertop. The red cup and eggplant remain in the sink.
### Key Observations
1. **Task Repetition with Variation:** The first and third sequences share the same title ("Put yellow corn in red cup") but depict completely different tasks involving different objects (corn/cup vs. pot/cup). This suggests a possible labeling error or a demonstration of the same high-level command applied to different object sets.
2. **Consistent Environment:** All sequences use the identical sink, rack, and countertop setup, indicating a controlled experimental or training environment.
3. **Object Permanence:** Objects not involved in the active task (e.g., the carrot in Sequence 2, the eggplant in Sequence 4) remain stationary throughout their respective sequences.
4. **Robotic Precision:** The arm demonstrates precise grasping, transport, and placement in each sequence, successfully completing the intended physical manipulation.
### Interpretation
This image serves as a technical demonstration of a robotic system's capability to perform sequential, object-manipulation tasks based on natural language instructions. The sequences illustrate the robot's ability to:
* **Parse Instructions:** Understand commands like "put X in Y" or "move A to B."
* **Perceive Objects:** Identify specific objects (corn, cup, plate, pot) within a cluttered scene.
* **Execute Motor Plans:** Perform the necessary sequence of movements (reach, grasp, transport, release) to fulfill the command.
The discrepancy in the third sequence's title is a critical observation. It highlights a potential issue in either the instruction-generation system, the data labeling process, or the demonstration curation. For a technical document, this inconsistency would need to be flagged for review, as it could indicate a breakdown in the alignment between language commands and physical actions, which is fundamental to reliable human-robot interaction.
The overall purpose is likely to showcase progress in embodied AI, where an agent must ground language in physical actions within a 3D environment. The clean, consistent setup suggests this is from a research paper, project demonstration, or training data collection effort for robotic learning.