## Pseudocode Diagram: 2p-greedy Algorithm
### Overview
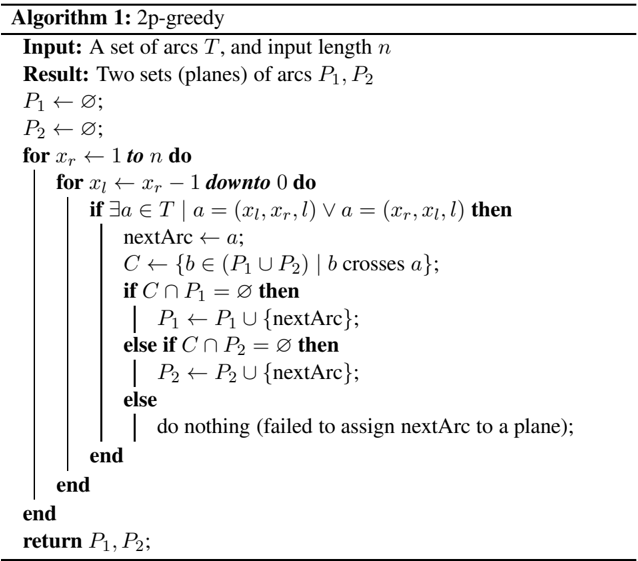
The image depicts a pseudocode algorithm named "2p-greedy" designed to partition a set of arcs into two disjoint sets (planes) `P1` and `P2`. The algorithm processes arcs based on their endpoints and assigns them to planes while ensuring no conflicts (crossing arcs) within the same plane.
### Components/Axes
- **Input**:
- `T`: A set of arcs.
- `n`: Input length (likely the maximum endpoint value).
- **Result**:
- Two sets of arcs: `P1` and `P2`, initialized as empty sets (`∅`).
- **Control Flow**:
- Nested loops iterate over arc endpoints `(x_r, x_l)` where `x_r` ranges from `1` to `n`, and `x_l` ranges from `x_r - 1` downto `0`.
- Conditional checks determine arc assignments to `P1` or `P2` based on crossing relationships.
### Detailed Analysis
1. **Initialization**:
- `P1` and `P2` are initialized as empty sets.
2. **Outer Loop (`x_r`)**:
- Iterates `x_r` from `1` to `n`.
3. **Inner Loop (`x_l`)**:
- For each `x_r`, iterates `x_l` from `x_r - 1` downto `0`.
4. **Arc Assignment**:
- If an arc `a = (x_r, x_l)` exists in `T`, it is assigned to `nextArc`.
- `C` is defined as the set of arcs in `T` that cross `a`.
- If `C` intersects `P1` (i.e., `C ∩ P1 ≠ ∅`), `nextArc` is added to `P1`.
- Else if `C` intersects `P2` (i.e., `C ∩ P2 ≠ ∅`), `nextArc` is added to `P2`.
- If neither condition is met, no assignment occurs.
5. **Termination**:
- Returns `P1` and `P2` after processing all arcs.
### Key Observations
- **Greedy Strategy**: The algorithm assigns arcs to planes in a greedy manner, prioritizing conflict avoidance within the same plane.
- **Conflict Resolution**: Arcs are assigned to `P1` or `P2` based on whether their crossing arcs already reside in those planes.
- **Edge Cases**: If no crossing arcs exist in either plane, the arc is not assigned (potential inefficiency).
### Interpretation
The algorithm aims to partition arcs into two planes such that no two arcs in the same plane cross each other. By iterating arcs in descending order of `x_r` and checking crossings dynamically, it ensures that each new arc is placed in a plane where its crossings are already resolved. However, the lack of assignment in the "else" clause suggests potential limitations in handling certain arc configurations. This approach resembles graph coloring or interval scheduling problems, where conflicts dictate resource allocation. The efficiency of the algorithm depends on the density of crossings in `T`, as frequent conflicts may lead to unassigned arcs.