## Screenshot: 3D Simulation Interface
### Overview
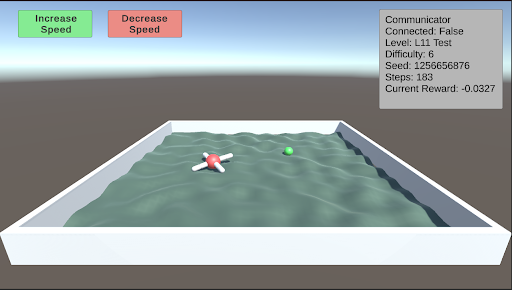
The image depicts a 3D simulation interface with a rectangular container filled with greenish water. Inside the container, there are two objects: a red molecule-like structure (cross-shaped with a central sphere) and a smaller green sphere. The interface includes UI elements such as buttons and a status panel. The background features a gradient from blue (sky) to gray (ground).
### Components/Axes
1. **Container**:
- Rectangular, white-edged, filled with wavy greenish water.
- Positioned centrally in the lower portion of the image.
2. **Objects in Container**:
- **Red Molecule**: Cross-shaped with a central red sphere (coordinates: center-left of container).
- **Green Sphere**: Small, located toward the upper-right of the container.
3. **UI Elements**:
- **Buttons**:
- **Top-left corner**:
- Green button labeled "Increase Speed."
- Red button labeled "Decrease Speed."
- **Status Panel**:
- **Top-right corner**:
- Text block with the following key-value pairs:
- `Communicator: Connected: False`
- `Level: L11 Test`
- `Difficulty: 6`
- `Seed: 1256656876`
- `Steps: 183`
- `Current Reward: -0.0327`
4. **Background**:
- Gradient from light blue (top) to dark gray (bottom), simulating sky and ground.
### Detailed Analysis
- **Buttons**: Colors match their labels (green for "Increase Speed," red for "Decrease Speed").
- **Status Panel**:
- `Communicator: Connected: False` indicates no active network connection.
- `Level: L11 Test` suggests a predefined simulation scenario.
- `Difficulty: 6` implies a moderate challenge level.
- `Seed: 1256656876` is a numerical identifier for reproducibility.
- `Steps: 183` tracks simulation progress.
- `Current Reward: -0.0327` indicates a negative performance metric, possibly due to inefficiency.
- **Container Contents**:
- The red molecule and green sphere may represent agents or targets in a reinforcement learning environment.
- The greenish water texture suggests fluid dynamics or environmental simulation.
### Key Observations
1. The simulation is in a test phase (`L11 Test`) with no active communicator connection.
2. The negative reward (`-0.0327`) implies suboptimal performance, potentially due to the difficulty level or agent behavior.
3. The seed value (`1256656876`) ensures reproducibility of the simulation state.
4. The buttons suggest user interaction to adjust simulation speed, though their functionality is not visually confirmed.
### Interpretation
This interface likely belongs to a reinforcement learning or control systems simulation. The red molecule and green sphere could represent entities interacting within a fluid environment, with the goal of optimizing performance (e.g., maximizing reward). The negative reward suggests the current configuration or agent strategy is inefficient. The absence of a communicator connection implies the simulation is running locally or in offline mode. The difficulty level (`6`) and step count (`183`) indicate the simulation has progressed moderately through its test phase. The seed value ensures reproducibility, critical for debugging or validating results.
No numerical trends or data series are present, as this is a static interface screenshot rather than a dynamic chart.