## Image Set: Robot Arm Actions
### Overview
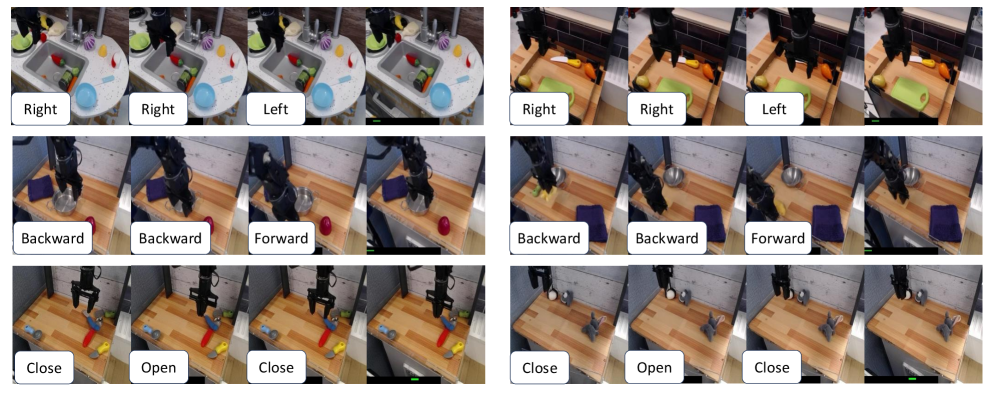
The image presents a series of paired photographs depicting a robotic arm performing actions in two different simulated environments. The left column shows the arm interacting with a toy kitchen sink, while the right column shows the arm interacting with a cutting board and various toy food items. Each row demonstrates a specific action or movement of the arm, with labels indicating the direction or state of the arm.
### Components/Axes
* **Labels:** Each image has a label indicating the action or direction of the robotic arm. The labels are "Right", "Left", "Backward", "Forward", "Close", and "Open".
* **Environments:**
* **Left Column:** Toy kitchen sink with various toy food items and dishes.
* **Right Column:** Cutting board with toy fruits and vegetables.
* **Robotic Arm:** A black robotic arm with a gripper is visible in each image.
### Detailed Analysis
**Row 1: Right, Right, Left (Sink & Cutting Board)**
* **Left Column (Sink):** The robotic arm moves from right to left relative to the sink.
* Image 1: "Right" - Arm positioned to the right of the sink.
* Image 2: "Right" - Arm positioned to the right of the sink.
* Image 3: "Left" - Arm positioned to the left of the sink.
* **Right Column (Cutting Board):** The robotic arm moves from right to left relative to the cutting board.
* Image 1: "Right" - Arm positioned to the right of the cutting board.
* Image 2: "Right" - Arm positioned to the right of the cutting board.
* Image 3: "Left" - Arm positioned to the left of the cutting board.
**Row 2: Backward, Backward, Forward (Sink & Cutting Board)**
* **Left Column (Sink):** The robotic arm moves backward and forward relative to the sink.
* Image 1: "Backward" - Arm positioned backward relative to the sink.
* Image 2: "Backward" - Arm positioned backward relative to the sink.
* Image 3: "Forward" - Arm positioned forward relative to the sink.
* **Right Column (Cutting Board):** The robotic arm moves backward and forward relative to the cutting board.
* Image 1: "Backward" - Arm positioned backward relative to the cutting board.
* Image 2: "Backward" - Arm positioned backward relative to the cutting board.
* Image 3: "Forward" - Arm positioned forward relative to the cutting board.
**Row 3: Close, Open, Close (Sink & Cutting Board)**
* **Left Column (Sink):** The robotic arm's gripper closes and opens.
* Image 1: "Close" - Gripper is closed.
* Image 2: "Open" - Gripper is open.
* Image 3: "Close" - Gripper is closed.
* **Right Column (Cutting Board):** The robotic arm's gripper closes and opens.
* Image 1: "Close" - Gripper is closed.
* Image 2: "Open" - Gripper is open.
* Image 3: "Close" - Gripper is closed.
### Key Observations
* The robotic arm is shown performing basic movements (left, right, forward, backward) and actions (opening and closing the gripper).
* The two environments provide different contexts for the arm's actions.
* The images are paired, showing the same action performed in both environments.
### Interpretation
The image set likely demonstrates the capabilities of a robotic arm in performing simple tasks within simulated environments. The actions shown (moving left/right, forward/backward, and gripping) are fundamental to many robotic applications. The use of two different environments suggests that the arm is designed to be adaptable to various contexts. The consistent pairing of actions across both environments implies a controlled experiment or demonstration of the arm's functionality. The images could be used to showcase the arm's precision, range of motion, or ability to interact with objects.