## Text-Based Environment Navigation Task
### Overview
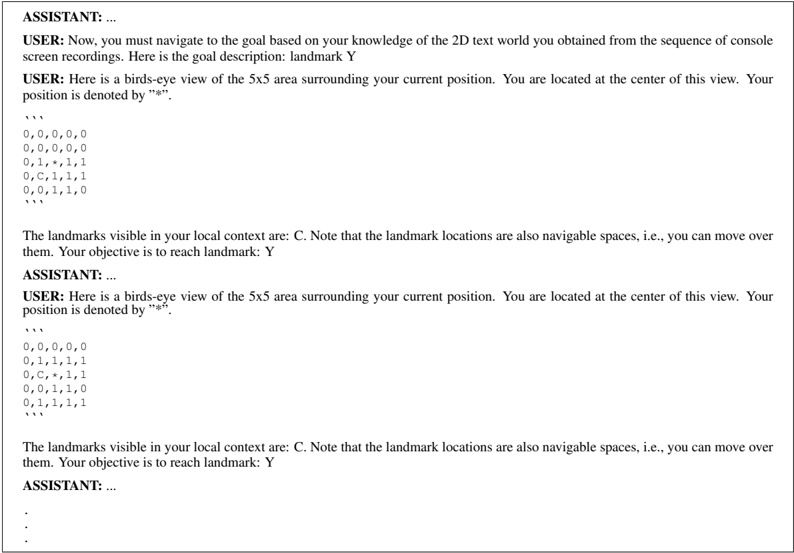
The image presents a simulated environment navigation task where an agent (USER) receives information about its surrounding 5x5 grid and must navigate to a specified landmark (Y). The agent receives bird's-eye views of the environment as text, with the current position denoted by "*". The landmark "C" is also visible in the local context, and the objective is to reach landmark "Y". There are two separate instances of the environment presented.
### Components/Axes
* **Agent (USER) Perspective:** The agent receives information through text-based commands and responses.
* **Environment Representation:** The environment is represented as a 5x5 grid of text characters.
* **Landmarks:** "C" and "Y" are the landmarks.
* **Current Position:** Denoted by "*".
* **Grid Values:** '0', '1', '*', and 'C' are used to populate the grid.
### Detailed Analysis
**Environment Instance 1:**
* **Initial State:**
```
0,0,0,0,0
0,0,0,0,0
0,1,*,1,1
0,C,1,1,1
0,0,1,1,0
```
The agent's current position "*" is at the center of the 5x5 grid (row 3, column 3). Landmark "C" is located at (row 4, column 2).
* **Goal:** Navigate to landmark "Y".
**Environment Instance 2:**
* **Initial State:**
```
0,0,0,0,0
0,1,1,1,1
0,C,*,1,1
0,0,1,1,0
0,1,1,1,1
```
The agent's current position "*" is at the center of the 5x5 grid (row 3, column 3). Landmark "C" is located at (row 3, column 2).
* **Goal:** Navigate to landmark "Y".
### Key Observations
* The environment is a discrete 2D grid world.
* The agent receives local, egocentric views of the environment.
* Landmark locations are navigable spaces.
* The agent's objective is to reach landmark "Y," but its location is not provided in the local context.
* There is a difference in the arrangement of '1's in the two instances.
### Interpretation
The image describes a reinforcement learning or planning problem where an agent must learn to navigate a text-based environment. The agent receives partial observations (local 5x5 views) and must use this information to reach a goal landmark. The problem emphasizes the importance of spatial reasoning and planning based on limited information. The environment is simplified to facilitate learning and experimentation. The two instances suggest that the agent may encounter different initial configurations, requiring it to adapt its strategy. The agent must determine how to move based on the current grid state in order to reach landmark "Y".