## Neural Network Architecture Diagram: Temporal Event Classification System
### Overview
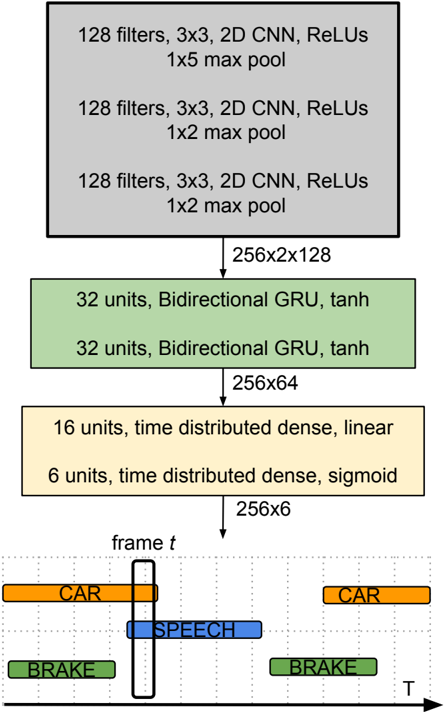
The diagram illustrates a deep learning architecture for temporal event classification, combining convolutional neural networks (CNNs), bidirectional GRUs, and dense layers. The bottom section visualizes event detection over time with color-coded labels.
### Components/Axes
1. **CNN Layers (Top Section)**
- Three identical 2D CNN blocks:
- 128 filters, 3x3 kernel size
- ReLU activation
- Max pooling: 1x5 (first layer), 1x2 (second and third layers)
- Output dimensions: 256x2x128 → 256x64 after pooling
2. **Bidirectional GRU Layer (Middle Section)**
- 32 units per direction
- Tanh activation
- Output dimensions: 256x64
3. **Dense Layers (Bottom Section)**
- Time-distributed dense layers:
- 16 units with linear activation
- 6 units with sigmoid activation
- Final output dimensions: 256x6
4. **Event Timeline (Bottom Visualization)**
- Horizontal axis labeled "T" (time)
- Vertical axis labeled "frame t"
- Color-coded event detection:
- Orange: CAR
- Blue: SPEECH
- Green: BRAKE
- Events shown at specific time intervals with overlapping detection windows
### Detailed Analysis
- **CNN Hierarchy**: Three identical convolutional blocks maintain spatial feature extraction while reducing temporal dimensions through max pooling (1x5 → 1x2).
- **Temporal Processing**: Bidirectional GRUs capture sequential dependencies in the 256x64 feature maps.
- **Classification**: Time-distributed dense layers enable per-frame event prediction, with sigmoid activation for multi-label classification (6 output units).
- **Event Visualization**: The timeline shows:
- CAR events (orange) with 50% overlap between frames
- SPEECH event (blue) spanning 3 frames
- BRAKE events (green) with 25% overlap
- Temporal resolution: 1 frame = 1/256 time unit
### Key Observations
1. **Feature Reduction**: Input dimensions reduce from 256x2x128 to 256x6 through progressive pooling and dense layers.
2. **Multi-label Detection**: Sigmoid activation allows simultaneous prediction of multiple events (CAR, SPEECH, BRAKE).
3. **Temporal Smoothing**: Overlapping event windows suggest temporal smoothing in the architecture.
4. **Bidirectional Context**: GRU layers capture both past and future context for event prediction.
### Interpretation
This architecture demonstrates a hybrid approach to temporal event classification:
1. **CNN Feature Extraction**: Initial layers focus on spatial feature detection in input data.
2. **GRU Temporal Modeling**: Bidirectional processing enables context-aware sequence modeling.
3. **Dense Classification**: Final layers specialize in event probability prediction per time frame.
The timeline visualization reveals the model's ability to:
- Detect overlapping events (e.g., CAR and BRAKE co-occurrence)
- Maintain temporal consistency across frames
- Handle multi-label classification through sigmoid outputs
The architecture's design suggests optimization for:
- Real-time event detection systems
- Audio-visual processing pipelines
- Temporal pattern recognition tasks