## Diagram: Transformation and Stability Relationships
### Overview
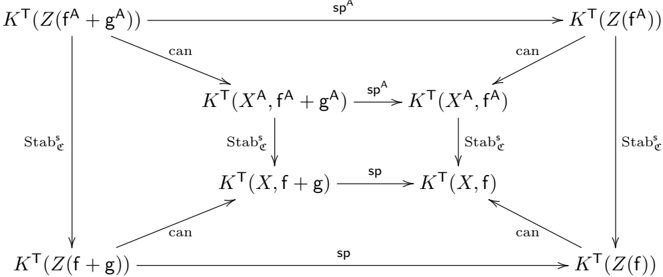
The diagram illustrates a network of transformations and stability conditions between various mathematical or computational components. It uses labeled arrows to denote possible transitions ("can"), specific operations ("sp^A", "sp"), and stability constraints ("Stab^ε"). The structure suggests a hierarchical or layered system with dependencies between nodes.
### Components/Axes
- **Nodes**: Represent transformed states or functions:
- `K^T(Z(f^A + g^A))`
- `K^T(X^A, f^A + g^A)`
- `K^T(X^A, f^A)`
- `K^T(X, f + g)`
- `K^T(X, f)`
- `K^T(Z(f))`
- **Arrows**:
- **Horizontal**: Labeled "can" (possibility), "sp^A" (operation A), or "sp" (generic operation).
- **Vertical**: Labeled "Stab^ε" (stability condition).
- **Flow Direction**: Top-to-bottom hierarchy with branching paths.
### Detailed Analysis
1. **Top Layer**:
- `K^T(Z(f^A + g^A))` connects to:
- `K^T(X^A, f^A + g^A)` via "can".
- `K^T(Z(f^A))` via "sp^A".
- `K^T(X^A, f^A + g^A)` connects to:
- `K^T(X^A, f^A)` via "sp^A".
- `K^T(X, f + g)` via "Stab^ε".
2. **Middle Layer**:
- `K^T(X, f + g)` connects to:
- `K^T(X, f)` via "sp".
- `K^T(Z(f))` via "can".
3. **Stability Constraints**:
- Vertical "Stab^ε" arrows link:
- `K^T(X^A, f^A + g^A)` → `K^T(X, f + g)`.
- `K^T(X^A, f^A)` → `K^T(X, f)`.
### Key Observations
- **Branching Logic**: Nodes split into multiple paths based on operations ("sp^A"/"sp") or stability conditions.
- **Stability as a Filter**: "Stab^ε" acts as a gatekeeper between layers, restricting transitions unless conditions are met.
- **Operation Hierarchy**: "sp^A" appears in higher layers, while "sp" dominates lower layers, suggesting a progression from specialized to general operations.
### Interpretation
This diagram likely models a system where transformations between states (`K^T`) depend on:
1. **Operational Context**: "sp^A" (A-specific operations) in upper layers vs. "sp" (general operations) in lower layers.
2. **Stability Requirements**: Vertical "Stab^ε" constraints enforce compatibility between transformed states.
3. **Possibility vs. Necessity**: "can" indicates optional paths, while "sp^A"/"sp" denote mandatory operations.
The structure implies a layered optimization or validation process, where higher-level transformations (`X^A`, `f^A`) must satisfy stability conditions before propagating to simpler forms (`X`, `f`). The absence of numerical data suggests this is a conceptual framework for analyzing dependencies in a mathematical or computational system.