## Image Analysis: Robotic Arm Picking Colored Objects
### Overview
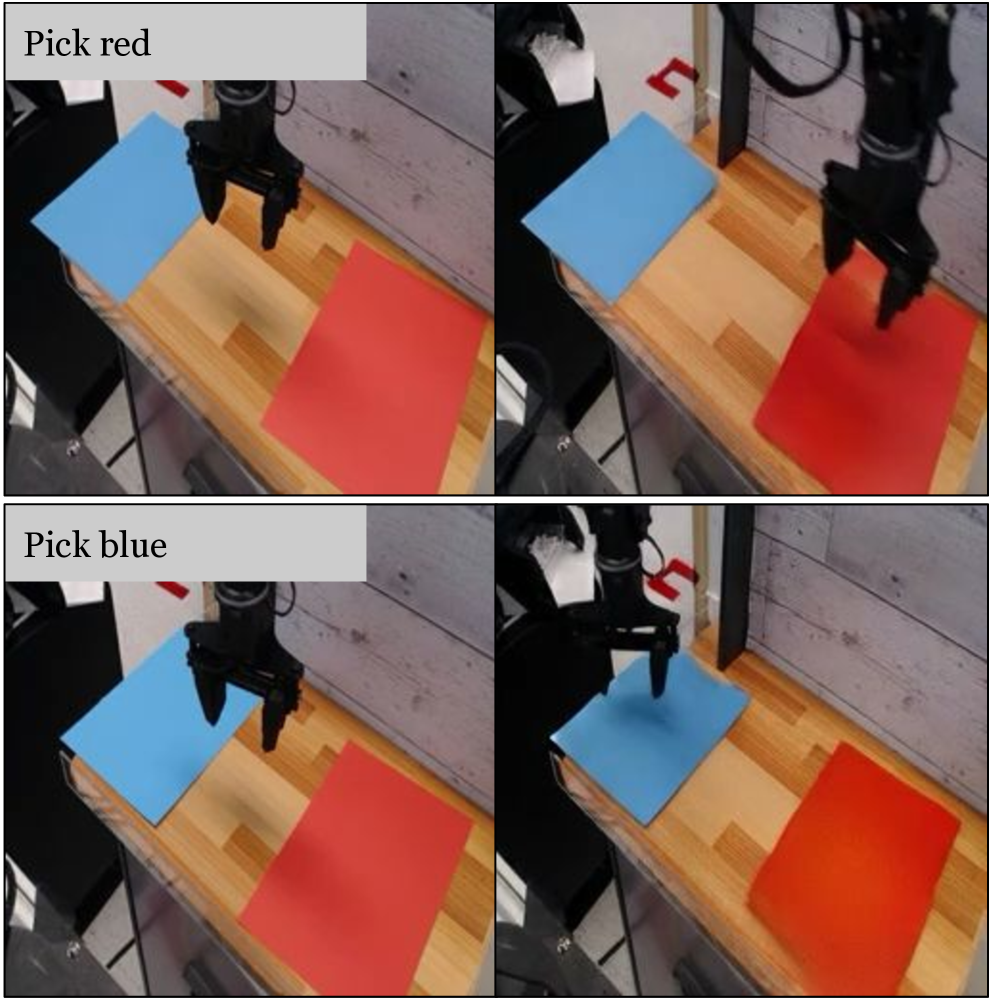
The image shows a robotic arm performing pick-and-place tasks with colored objects (red and blue). The image is divided into four quadrants, showing the robot's actions in sequence. The top two quadrants show the robot picking the red object, and the bottom two quadrants show the robot picking the blue object.
### Components/Axes
* **Objects:** Red and blue rectangular objects (presumably sheets of paper or similar).
* **Robotic Arm:** A black robotic arm with a gripper.
* **Work Surface:** A wooden-patterned surface where the objects are placed.
* **Background:** A wall with a light-colored, possibly wooden, texture.
* **Labels:**
* Top-left quadrant: "Pick red"
* Bottom-left quadrant: "Pick blue"
### Detailed Analysis
The image is divided into four sub-images, arranged in a 2x2 grid.
**Top Row:**
* **Top-Left:** The robotic arm is positioned above the blue object, with the red object to the right. The label "Pick red" is present.
* **Top-Right:** The robotic arm is shown picking up the red object. The blue object remains untouched.
**Bottom Row:**
* **Bottom-Left:** The robotic arm is positioned above the red object, with the blue object to the left. The label "Pick blue" is present.
* **Bottom-Right:** The robotic arm is shown picking up the blue object. The red object remains untouched.
### Key Observations
* The robotic arm is capable of distinguishing between the red and blue objects.
* The labels indicate the intended target for the robotic arm in each scenario.
* The images show the robot successfully executing the "Pick red" and "Pick blue" commands.
### Interpretation
The image demonstrates the ability of a robotic arm to perform object recognition and manipulation based on color. The robot is programmed to identify and pick up specific colored objects, showcasing a basic level of automation and visual perception. The sequence of images provides a clear visual representation of the robot's actions in response to different commands. The setup suggests a controlled environment where the robot's performance can be evaluated and refined.