## Screenshot: Robotics Simulation Interface
### Overview
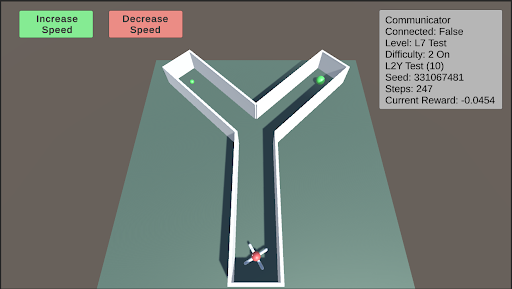
The image depicts a 3D simulation interface for a robotics control system. The central focus is a Y-shaped track with a robotic agent at the bottom, two green spherical targets in the upper arms of the Y, and UI controls for speed adjustment. A status panel in the top-right corner displays test parameters and performance metrics.
### Components/Axes
1. **Track Layout**:
- Y-shaped structure with three vertical walls
- Two upper arms (left and right) containing green spherical targets
- Central vertical shaft extending downward to the robot
2. **Robot**:
- Positioned at the bottom of the central shaft
- Red body with blue/white appendages (likely propellers/wheels)
3. **UI Controls**:
- Top-left quadrant:
- Green button: "Increase Speed"
- Red button: "Decrease Speed"
4. **Status Panel** (top-right):
- Text labels with values:
- Communicator: Connected: False
- Level: L7 Test
- Difficulty: 2 On
- L2Y Test: (10)
- Seed: 331067481
- Steps: 247
- Current Reward: -0.0454
### Detailed Analysis
- **Track Geometry**:
- Left arm: Green target at ~1/3 height from bottom
- Right arm: Green target at ~2/3 height from bottom
- Central shaft: Vertical alignment with robot at base
- **Robot Positioning**:
- Located at the lowest point of the central shaft
- Orientation suggests forward-facing trajectory toward track bifurcation
- **Status Panel Metrics**:
- Seed value (331067481) indicates procedural generation
- Negative reward (-0.0454) suggests suboptimal performance
- Steps counter (247) implies active simulation state
### Key Observations
1. The robot's position at the track's base suggests initialization phase
2. Divergent target heights in Y-arms may test path selection algorithms
3. Negative reward value implies current trajectory conflicts with objectives
4. Disconnected communicator status indicates offline testing mode
5. Difficulty level 2 correlates with challenging target placement
### Interpretation
This interface appears designed for testing autonomous navigation algorithms in constrained environments. The Y-shaped track creates decision points requiring speed modulation (via UI controls) to reach targets. The negative reward metric (-0.0454) suggests the robot's current path deviates from optimal solutions, possibly due to difficulty level 2 constraints. The disconnected communicator status implies local processing without real-time data transmission. The seed value enables reproducibility of this specific test scenario. The 247-step count indicates moderate progress through the simulation, with the robot likely exploring path options between the two asymmetrically placed targets.