## Neural Network Architecture Diagram: Layer-by-Layer Breakdown
### Overview
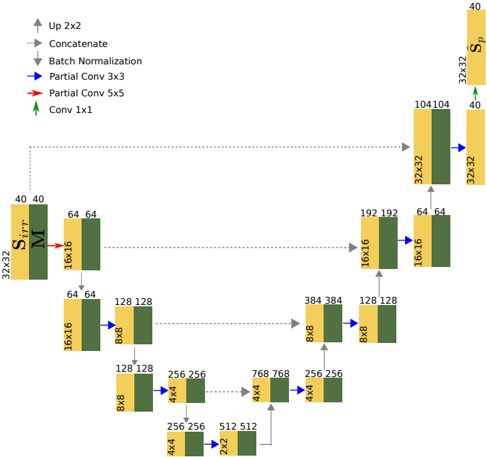
The diagram illustrates a neural network architecture with sequential and parallel processing paths. It includes convolutional layers, batch normalization, concatenation operations, and upsampling. The flow progresses from input (S_irr) through multiple processing stages to output (S_p), with dimensionality changes and feature map concatenations.
### Components/Axes
- **Input Layer**:
- `S_irr` (40x40x32) - Initial input tensor
- **Processing Paths**:
- **Main Path**:
- `M` (16x16x64) → `Bx8` (128x128x64) → `Bx8` (256x256x64) → `Bx8` (512x512x64)
- **Parallel Paths**:
- `Partial Conv 3x3` (104x104x32) → `Partial Conv 5x5` (192x192x32)
- `Conv 1x1` (32x32x32) → `Conv 1x1` (32x32x64)
- **Operations**:
- `Up 2x2` (upsampling)
- `Concatenate` (feature map merging)
- `Batch Normalization` (normalization blocks)
- **Output Layer**:
- `S_p` (40x40x40) - Final output tensor
### Detailed Analysis
1. **Input Stage**:
- `S_irr` (40x40x32) enters the network
- First `Conv 1x1` reduces channels to 32 (32x32x32)
2. **Main Processing Path**:
- `M` (16x16x64) → `Bx8` (128x128x64) via upsampling
- Subsequent `Bx8` layers double spatial dimensions:
- 128x128 → 256x256 → 512x512
- Final `Bx8` layer maintains 512x512x64 dimensions
3. **Parallel Paths**:
- **3x3 Kernel Path**:
- `Partial Conv 3x3` (104x104x32) → `Partial Conv 5x5` (192x192x32)
- **1x1 Kernel Path**:
- `Conv 1x1` (32x32x32) → `Conv 1x1` (32x32x64)
4. **Concatenation Points**:
- Multiple merge points combine feature maps:
- 64x64 → 128x128 → 256x256 → 512x512
- Final concatenation merges 32x32x64 and 32x32x40 to produce 32x32x40
5. **Output Stage**:
- Final `Up 2x2` upsampling produces `S_p` (40x40x40)
### Key Observations
- **Dimensionality Changes**:
- Input: 40x40x32 → Output: 40x40x40
- Spatial dimensions expand from 16x16 to 512x512 in main path
- **Feature Map Concatenation**:
- Multiple merge points combine features from different scales
- **Channel Consistency**:
- 64 channels maintained through main path `Bx8` layers
- **Kernel Size Variation**:
- 3x3 and 5x5 convolutions in parallel paths vs 1x1 in main path
### Interpretation
This architecture appears designed for multi-scale feature extraction with spatial pyramid pooling characteristics. The parallel paths with varying kernel sizes (3x3, 5x5) capture features at different receptive fields, while the main path preserves high-resolution features through upsampling. The final concatenation of 32x32x64 and 32x32x40 suggests a fusion of deep features with original input dimensions, typical in segmentation networks. The use of batch normalization after each convolution indicates attention to training stability. The architecture's U-shaped design (expanding then contracting paths) resembles a U-Net structure, optimized for precise spatial localization tasks.