\n
## Algorithm: 2-prop
### Overview
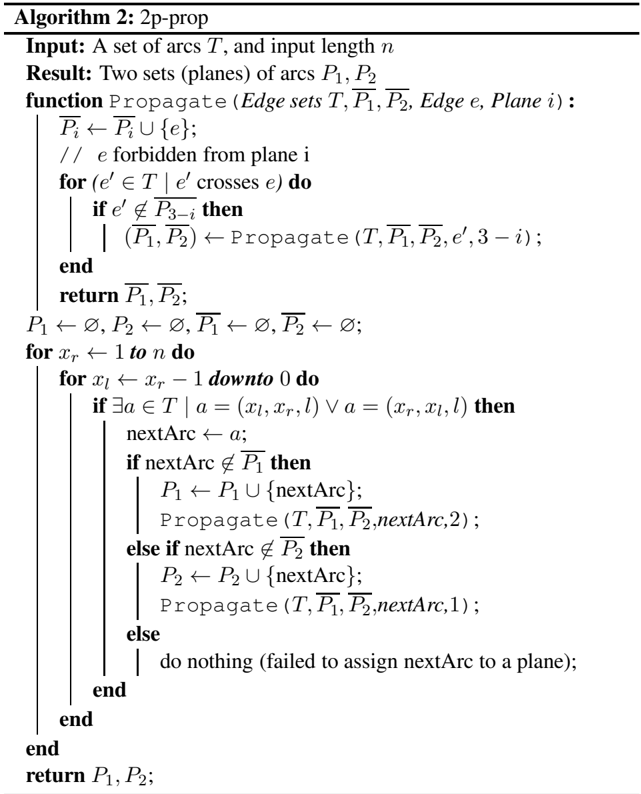
The image presents a pseudocode algorithm named "2-prop". It details a procedure for partitioning a set of arcs into two sets, P1 and P2, based on propagation rules and constraints. The algorithm takes a set of arcs T and an input length n as input.
### Components/Axes
The content is entirely pseudocode, structured as a function definition and iterative loops. There are no axes or charts. The key components are:
* **Algorithm Title:** "Algorithm 2: 2-prop"
* **Input:** "A set of arcs T, and input length n"
* **Result:** "Two sets (planes) of arcs P1, P2"
* **Function Definition:** `function Propagate (Edge sets T, P1, P2, Edge e, Plane i)`
* **Loops:** `for` loops with index variables (xr, x1) and conditional statements (`if`, `else`).
* **Variable Assignments:** Assignments like `P1 ← P1 ∪ {nextArc}`.
* **Return Statement:** `return P1, P2;`
### Content Details
Here's a transcription of the pseudocode:
```
Algorithm 2: 2-prop
Input: A set of arcs T, and input length n
Result: Two sets (planes) of arcs P1, P2
function Propagate (Edge sets T, P1, P2, Edge e, Plane i):
P2 ← P2 ∪ {e};
// e forbidden from plane i
for (e' ∈ T | e' crosses e) do
if e' ∉ P3−i then
(P1, P2) ← Propagate(T, P1, P2, e', 3 − i);
end
return P1, P2;
P1 ← ∅, P2 ← ∅, P1 ← ∅, P2 ← ∅;
for xr ← 1 to n do
for x1 ← xr − 1 downto 0 do
if ∃a ∈ T | a = (x1, xr, l) ∨ a = (xr, x1, l) then
nextArc ← a;
if nextArc ∉ P1 then
P1 ← P1 ∪ {nextArc};
Propagate(T, P1, P2, nextArc, 2);
else if nextArc ∉ P2 then
P2 ← P2 ∪ {nextArc};
Propagate(T, P1, P2, nextArc, 1);
else
do nothing (failed to assign nextArc to a plane);
end
end
end
return P1, P2;
```
### Key Observations
* The algorithm uses a recursive function `Propagate` to assign arcs to planes P1 and P2.
* The `Propagate` function forbids an edge `e` from a specific plane `i` and then propagates this constraint to other crossing edges.
* The main loop iterates through possible arc combinations (xr, x1) and attempts to assign them to either P1 or P2.
* If an arc cannot be assigned to either plane, it is skipped.
* The algorithm initializes both P1 and P2 as empty sets.
### Interpretation
This algorithm appears to be designed for partitioning a set of arcs (representing edges in a graph) into two disjoint sets (planes) while respecting certain crossing constraints. The core idea is to recursively propagate constraints based on edge crossings. If an edge `e` is forbidden from plane `i`, any edge that crosses `e` must be considered for assignment to the other plane.
The algorithm's effectiveness likely depends on the structure of the input arc set `T` and the input length `n`. The "do nothing" condition suggests that there might be cases where a valid assignment cannot be found, potentially indicating a conflict in the constraints or a poorly defined input. The algorithm's purpose could be related to graph coloring, planar graph embedding, or other problems where partitioning edges into disjoint sets is required. The use of the term "planes" suggests a geometric interpretation, possibly related to dividing a space into two regions.