\n
## Screenshot: Game Environment
### Overview
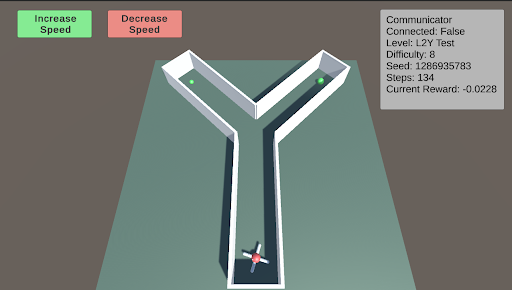
The image is a screenshot of a 3D game environment, likely a reinforcement learning or robotics simulation. It depicts a simple maze-like structure with a robotic agent at the bottom and two green spheres positioned at the ends of the maze's branches. The top-left corner shows buttons to control the speed, and the top-right corner displays game parameters.
### Components/Axes
The screenshot contains the following elements:
* **Maze:** A white, Y-shaped maze structure.
* **Agent:** A small, red and blue robotic agent at the base of the maze.
* **Spheres:** Two green spheres, one at the end of each branch of the maze.
* **Speed Controls:** Two buttons labeled "Increase Speed" (green) and "Decrease Speed" (red).
* **Game Parameters:** A text block displaying game information.
### Content Details
The text block in the top-right corner provides the following information:
* **Communicator:** Connected: False
* **Level:** L2Y Test
* **Difficulty:** 8
* **Seed:** 1286935783
* **Steps:** 134
* **Current Reward:** -0.0228
The buttons in the top-left corner are labeled:
* "Increase Speed" (Green)
* "Decrease Speed" (Red)
### Key Observations
* The agent is positioned at the start of the maze.
* The "Communicator" is disconnected.
* The current reward is negative, suggesting the agent has not yet achieved a positive outcome.
* The level is labeled as a "Test" level.
* The seed value suggests a deterministic environment for reproducibility.
### Interpretation
The screenshot likely represents a reinforcement learning environment where an agent is learning to navigate a maze. The negative reward indicates the agent is currently performing poorly, and the disconnected communicator suggests no external guidance is being provided. The seed value allows for recreating the exact same environment and initial conditions for consistent training and evaluation. The "L2Y Test" level name suggests this is a level designed for testing or learning purposes. The presence of speed control buttons indicates that the agent's movement speed can be adjusted, potentially to influence learning or performance. The overall setup suggests a controlled environment for training an AI agent to solve a navigation task.