## Screenshot: Robotics Simulation Interface
### Overview
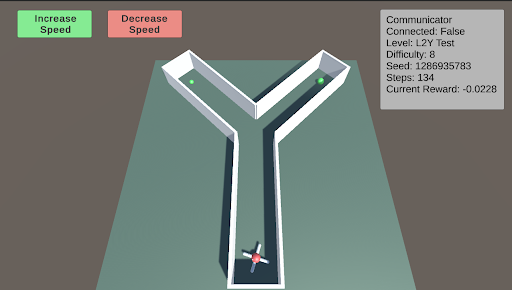
The image depicts a 3D simulation interface for a robotics control system. The central focus is a Y-shaped track with a propeller-like object (red and white) positioned at the bottom center. Two green dots are placed at the ends of the Y-shaped arms. The interface includes UI elements for speed control and system status monitoring.
### Components/Axes
1. **UI Elements**:
- **Top-left**: Green button labeled "Increase Speed"
- **Top-right**: Red button labeled "Decrease Speed"
- **Top-right panel**: Status information (text-based, no axes)
2. **Status Panel Text**:
- **Communicator**: Connected: False
- **Level**: L2Y Test
- **Difficulty**: 8
- **Seed**: 1286935783
- **Steps**: 134
- **Current Reward**: -0.0228
3. **Track Geometry**:
- Y-shaped structure with three arms (left, right, and central stem).
- Green dots positioned at the endpoints of the left and right arms.
- Propeller object located at the base of the central stem.
### Detailed Analysis
- **Speed Control**: Buttons are color-coded (green for increase, red for decrease), suggesting real-time adjustment of the propeller's speed.
- **Track Layout**: The Y-shape implies a navigation task requiring the propeller to reach one of the green endpoints.
- **Status Metrics**:
- **Seed**: A large integer (1286935783) used for procedural generation or reproducibility.
- **Steps**: 134 actions taken by the system (likely control commands).
- **Current Reward**: Negative value (-0.0228), indicating suboptimal performance.
### Key Observations
1. The system is in a test state (`L2Y Test`) with no active communicator connection.
2. The negative reward suggests the propeller has not yet reached a goal or is penalized for its current trajectory.
3. The high seed value implies a randomized environment setup for testing.
### Interpretation
This interface simulates a reinforcement learning or control algorithm task where the propeller must navigate the Y-shaped track to reach a goal (green dot). The negative reward indicates the system is either stuck, taking inefficient paths, or has not yet completed the task. The disconnected communicator suggests this is a local test rather than a networked simulation. The seed value ensures reproducibility, while the step count and reward metric provide quantitative feedback for algorithm tuning. The Y-shaped track introduces a branching decision point, requiring the system to choose a path to the goal.