TECHNICAL ASSET FINGERPRINT
d71a121808d494fa73dfa0de
Click to view fullscreen
Press ESC or click to close
FOUND IN PAPERS
EXPERT: healer-alpha-free VERSION 1
RUNTIME: free/openrouter/healer-alpha
INTEL_VERIFIED
## Technical Document Extraction: Maze and Sokoban Problem-Solving Examples
### Overview
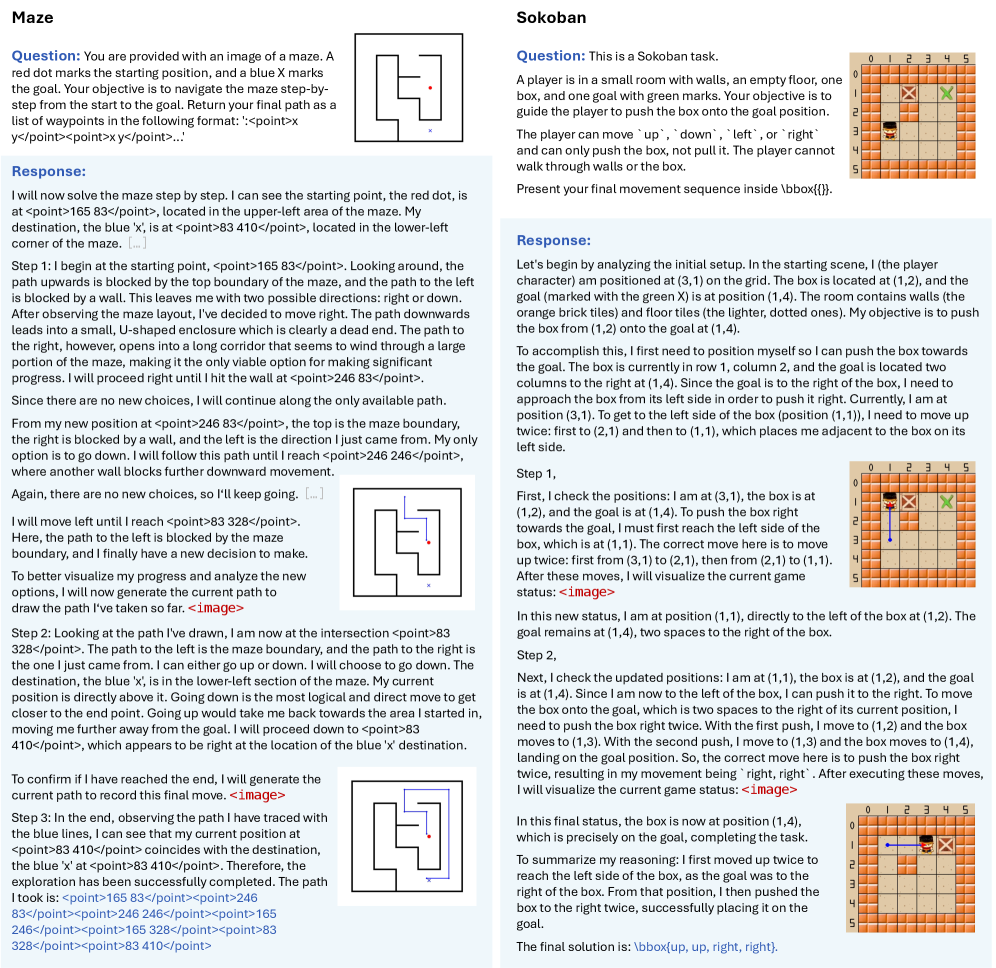
The image is a composite technical document presenting two distinct spatial reasoning tasks: a **Maze navigation problem** (left column) and a **Sokoban puzzle** (right column). Each section includes a problem statement, a step-by-step solution response with embedded visualizations, and final answers. The document appears to be from a technical paper or report demonstrating an AI agent's ability to solve visual-spatial problems.
---
### **Left Column: Maze Task**
#### Components/Axes
* **Title:** "Maze"
* **Question Text:** "You are provided with an image of a maze. A red dot marks the starting position, and a blue X marks the goal. Your objective is to navigate the maze step-by-step from the start to the goal. Return your final path as a list of waypoints in the following format: `<point>x y</point><point>x y</point>...`"
* **Visual Elements:**
* A square maze grid with black walls on a white background.
* A **red dot** (starting point) located in the upper-left quadrant.
* A **blue 'X'** (goal) located in the lower-left quadrant.
* A **blue line** tracing the agent's path through the maze, shown in three progressive stages.
* **Response Text:** A detailed, step-by-step narrative of the navigation process, including decision-making at intersections and dead ends.
#### Detailed Analysis
**Step 1:**
* **Starting Point:** Identified at `<point>165 83</point>` (upper-left area).
* **Goal Point:** Identified at `<point>83 410</point>` (lower-left corner).
* **Initial Decision:** From start, right is chosen as the only viable path (down leads to a U-shaped dead end).
* **Path:** Moves right until hitting a wall at `<point>246 83</point>`, then proceeds down.
* **Visualization:** First embedded `<image>` shows the initial path segment (blue line) from the start, moving right and then down.
**Step 2:**
* **Current Position:** `<point>83 328</point>` (at an intersection).
* **Decision:** Chooses to go down, as it leads directly toward the goal's vertical level.
* **Path:** Proceeds down to `<point>83 410</point>`, which aligns with the goal's location.
* **Visualization:** Second embedded `<image>` shows the extended path, now reaching the goal's vicinity.
**Step 3 (Final):**
* **Confirmation:** The agent's traced path (blue line) ends at `<point>83 410</point>`, coinciding with the blue 'X'.
* **Final Path Output:** A sequence of 7 waypoints:
`<point>165 83</point><point>246 83</point><point>246 246</point><point>165 246</point><point>165 328</point><point>83 328</point><point>83 410</point>`
* **Visualization:** Third embedded `<image>` shows the complete, successful path from start to goal.
#### Key Observations
* The maze contains deliberate dead ends (e.g., the initial downward path).
* The solution path is not the shortest geometric line but the only viable route through the maze's corridors.
* The agent uses visualization (generating path images) as a tool to analyze its progress and options.
#### Interpretation
This section demonstrates an AI agent's capability in **sequential spatial reasoning and pathfinding**. The agent doesn't just compute a path; it verbalizes its decision-making process, evaluates alternatives, and uses self-generated visualizations to verify its state. The final output is a precise, coordinate-based path, suitable for robotic navigation or simulation. The process mirrors human-like problem-solving: exploration, dead-end recognition, backtracking logic, and goal confirmation.
---
### **Right Column: Sokoban Task**
#### Components/Axes
* **Title:** "Sokoban"
* **Question Text:** "This is a Sokoban task. A player is in a small room with walls, an empty floor, one box, and one goal with green marks. Your objective is to guide the player to push the box onto the goal position. The player can move 'up', 'down', 'left', or 'right' and can only push the box, not pull it. The player cannot walk through walls or the box. Present your final movement sequence inside \boxed{}."
* **Visual Elements:**
* A 6x6 grid (coordinates 0-5 on both axes).
* **Walls:** Orange brick-textured tiles.
* **Floor:** Lighter, dotted tiles.
* **Player:** A character icon.
* **Box:** A brown crate icon.
* **Goal:** A green 'X' mark.
* **Initial State Image:** Shows Player at (3,1), Box at (1,2), Goal at (1,4).
* **Intermediate State Image:** Shows Player at (1,1), Box at (1,2), Goal at (1,4). A blue arrow indicates the planned push direction.
* **Final State Image:** Shows Box at (1,4) on top of the Goal, Player at (1,3).
* **Response Text:** A logical, step-by-step analysis of positions and movement planning.
#### Detailed Analysis
**Initial Analysis:**
* **Player Start:** (3,1)
* **Box Position:** (1,2)
* **Goal Position:** (1,4)
* **Strategy:** To push the box right onto the goal, the player must first get to the box's left side at (1,1).
**Step 1:**
* **Movement:** Player moves from (3,1) to (2,1) to (1,1). This is described as "move up twice".
* **Result:** Player is now at (1,1), directly left of the box at (1,2).
* **Visualization:** First embedded `<image>` shows this new state with a blue arrow pointing from the box toward the goal.
**Step 2:**
* **Action:** Push the box right twice.
* **First Push:** Player moves from (1,1) to (1,2), pushing box to (1,3).
* **Second Push:** Player moves from (1,2) to (1,3), pushing box to (1,4).
* **Result:** Box is now on the goal at (1,4). Player is at (1,3).
* **Visualization:** Second embedded `<image>` shows the final solved state.
**Final Solution:**
* **Movement Sequence:** `up, up, right, right`
* **Formatted Output:** `\boxed{up, up, right, right}`
#### Key Observations
* The solution requires **indirect manipulation**: the player must first navigate to a specific position relative to the box before any pushing can occur.
* The agent correctly identifies the core constraint: it can only push, not pull.
* The solution is optimal in terms of move count for this specific configuration.
#### Interpretation
This section showcases **planning under constraints**. The agent must model the game's physics (push-only, no walking through objects) and perform multi-step reasoning. It breaks the problem into subgoals: 1) Achieve the correct pushing position, 2) Execute the pushes. The use of grid coordinates and state visualization is crucial for accurate planning. This demonstrates capabilities relevant to robotics, game AI, and automated planning systems where an agent must manipulate objects in a structured environment.
---
### **Overall Interpretation & Synthesis**
The document serves as a **comparative showcase of an AI's visual-spatial reasoning abilities** across two classic problem domains.
* **Maze (Navigation):** Tests pathfinding, dead-end recognition, and sequential decision-making in a static, obstacle-filled environment. The output is a continuous path.
* **Sokoban (Manipulation):** Tests planning, understanding of object interactions, and constraint satisfaction in a dynamic environment where the agent's actions change the state of the world. The output is a discrete action sequence.
**Common Themes:**
1. **Visual Grounding:** Both tasks require the agent to interpret a visual scene (maze layout, grid state) and translate it into symbolic coordinates and relationships.
2. **Step-by-Step Reasoning:** The responses are not just answers but detailed explanations of the reasoning process, highlighting intermediate states and decisions.
3. **Self-Verification:** The agent uses generated images (Maze) or references to updated visual states (Sokoban) to confirm its progress and the correctness of its plan.
4. **Structured Output:** Both require a specific, machine-readable final format (waypoint list, command sequence).
**Notable Anomaly:** The Maze solution path includes a segment (`<point>246 246</point>` to `<point>165 246</point>`) that appears to backtrack leftward. This is not an error but a necessary maneuver to navigate around an internal wall to reach the correct vertical corridor leading to the goal, demonstrating sophisticated spatial awareness beyond simple greedy algorithms.
In summary, this technical document illustrates a multimodal AI system capable of perceiving visual scenes, reasoning about spatial relationships and constraints, planning action sequences, and communicating its process in a clear, structured, and verifiable manner.
DECODING INTELLIGENCE...