## Flowchart Diagram: Human-Robot Interaction Models
### Overview
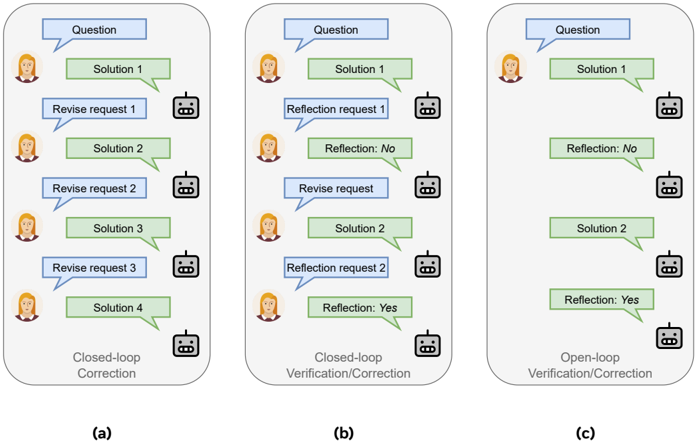
The image presents three side-by-side diagrams (a, b, c) illustrating different human-robot interaction workflows. Each diagram uses speech bubbles (blue for humans, green for robots) and robot icons to depict iterative problem-solving processes. The diagrams differ in their feedback mechanisms and loop closure criteria.
### Components/Axes
1. **Human Element**:
- Represented by a speech bubble with "Question" at the top of all diagrams
- Positioned left-aligned in all panels
2. **Robot Element**:
- Speech bubbles with solution/reflection responses
- Robot icon (gray with mouth) appears after each robot response
3. **Flow Arrows**:
- Blue arrows indicate human-to-robot requests
- Green arrows indicate robot-to-human responses
4. **Diagram Labels**:
- (a) Closed-loop Correction
- (b) Closed-loop Verification/Correction
- (c) Open-loop Verification/Correction
### Detailed Analysis
#### Diagram (a): Closed-loop Correction
1. **Flow Sequence**:
- Human → Robot: Question → Solution 1
- Human → Robot: Revise request 1 → Solution 2
- Human → Robot: Revise request 2 → Solution 3
- Human → Robot: Revise request 3 → Solution 4
2. **Key Features**:
- Continuous revision cycle until final solution
- No explicit verification step
- Closed-loop termination after final solution
#### Diagram (b): Closed-loop Verification/Correction
1. **Flow Sequence**:
- Human → Robot: Question → Solution 1
- Human → Robot: Reflection request 1 → Reflection: No
- Human → Robot: Revise request → Solution 2
- Human → Robot: Reflection request 2 → Reflection: Yes
2. **Key Features**:
- Verification step after each solution
- Loop closes only after "Reflection: Yes"
- Combines correction and validation
#### Diagram (c): Open-loop Verification/Correction
1. **Flow Sequence**:
- Human → Robot: Question → Solution 1
- Human → Robot: Reflection request → Reflection: No
- Human → Robot: Reflection request → Reflection: Yes
- Human → Robot: Reflection request → Reflection: Yes
2. **Key Features**:
- Open-loop continuation after verification
- Multiple verification attempts shown
- No explicit closure mechanism
### Key Observations
1. **Iteration Patterns**:
- Diagram (a) shows maximum iterations (4 solutions)
- Diagram (b) demonstrates verification-gated closure
- Diagram (c) reveals persistent open-loop behavior
2. **Feedback Mechanisms**:
- "Revise request" vs "Reflection request" differentiation
- "Reflection: Yes/No" as binary verification signal
- Loop closure criteria vary between diagrams
3. **Structural Differences**:
- (a) Linear progression with fixed iterations
- (b) Conditional closure based on verification
- (c) Open-ended verification attempts
### Interpretation
The diagrams illustrate three distinct human-robot collaboration paradigms:
1. **Closed-loop Correction (a)** represents traditional iterative refinement without explicit quality checks
2. **Closed-loop Verification/Correction (b)** introduces quality assurance through human reflection, creating a more robust but potentially slower process
3. **Open-loop Verification/Correction (c)** suggests a system designed for continuous improvement even after initial validation, possibly for dynamic environments requiring ongoing adjustments
The progression from (a) to (c) demonstrates increasing complexity in human-robot interaction models, with (b) serving as a transitional architecture between simple correction and persistent verification systems. The use of "Reflection" as a verification mechanism implies cognitive-level interaction beyond basic command-response patterns.