\n
## Diagram: Biological Body Representations & Robot Performance
### Overview
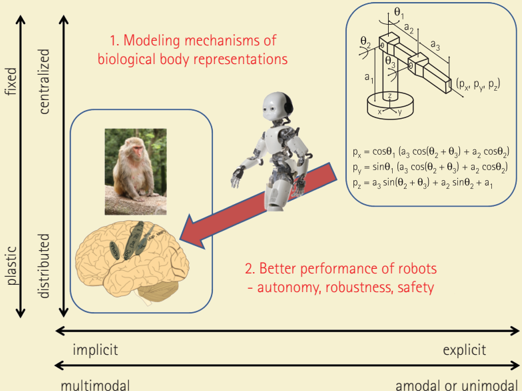
The image is a conceptual diagram illustrating the relationship between modeling biological body representations and improving robot performance. It uses a 2x2 matrix with axes representing "fixed/plastic" and "centralized/distributed", and "implicit/explicit" and "multimodal/amodal or unimodal". The diagram features images of a monkey and a human brain on the left, a robot in the center, and a mechanical arm diagram with equations on the right. Arrows indicate a flow or transition from biological representations to robot capabilities.
### Components/Axes
* **Vertical Axis:** "fixed" (top) to "plastic" (bottom).
* **Horizontal Axis 1:** "centralized" (left) to "distributed" (right).
* **Horizontal Axis 2:** "implicit" (left) to "explicit" (right).
* **Bottom Axis:** "multimodal" (left) to "amodal or unimodal" (right).
* **Label 1:** "1. Modeling mechanisms of biological body representations" (top-right, in red text).
* **Label 2:** "2. Better performance of robots - autonomy, robustness, safety" (bottom-right, in red text).
* **Images:** Monkey, Human Brain, Robot, Mechanical Arm.
* **Arrow:** A large red arrow pointing from the left (monkey/brain) towards the robot.
* **Equations:** `Px = cosθ1 (a3 cos(θ2 + θ3) + a2 cosθ2)`
`Py = sinθ1 (a3 cos(θ2 + θ3) + a2 cosθ2)`
`Pz = a3 sin(θ2 + θ3) + a2 sinθ2 + a1`
### Detailed Analysis / Content Details
The diagram is structured around a conceptual space defined by the axes.
* **Top-Left Quadrant:** Contains an image of a monkey. This quadrant is labeled as "fixed" and "centralized".
* **Bottom-Left Quadrant:** Contains an image of a human brain. This quadrant is labeled as "plastic" and "distributed".
* **Center:** A white robot figure is positioned in the center of the diagram, with the red arrow originating from the monkey/brain area and pointing towards it.
* **Top-Right Quadrant:** Contains a diagram of a mechanical arm with labeled segments (a1, a2, a3) and angles (θ1, θ2, θ3). This quadrant is labeled as "fixed" and "explicit".
* **Bottom-Right Quadrant:** This quadrant is labeled as "plastic" and "explicit".
* **Mechanical Arm Diagram:** The arm consists of three segments labeled a1, a2, and a3, connected by joints with angles θ1, θ2, and θ3. The end of the arm is labeled with coordinates Px, Py, and Pz. The equations provided calculate the x, y, and z coordinates of the end effector (P) based on the segment lengths (a1, a2, a3) and joint angles (θ1, θ2, θ3).
### Key Observations
* The diagram suggests a progression or mapping from biological body representations (monkey and brain) to robotic systems.
* The mechanical arm diagram and associated equations represent an "explicit" and "fixed" representation of body mechanics.
* The red arrow visually emphasizes the transfer of knowledge or principles from biological systems to robotic design.
* The axes define a conceptual space for categorizing different approaches to body representation and control.
### Interpretation
The diagram illustrates a research direction focused on leveraging insights from biological body representations to improve robot performance. The positioning of the monkey and brain in the "implicit" and "distributed" quadrants suggests that biological systems rely on complex, distributed processing and implicit knowledge. The goal, as indicated by Label 2, is to translate these principles into robots to enhance their autonomy, robustness, and safety. The mechanical arm diagram represents a more traditional, explicit, and fixed approach to robot control. The equations provide a concrete example of how robot kinematics can be mathematically defined. The diagram implies that by understanding the mechanisms underlying biological body representations, we can develop more sophisticated and capable robotic systems. The diagram is conceptual and does not present quantitative data, but rather a qualitative framework for understanding the relationship between biology and robotics. The use of the 2x2 matrix suggests a categorization of different approaches, and the arrow indicates a desired direction of progress.