## Diagram: Modeling Mechanisms of Biological Body Representations and Robot Performance
### Overview
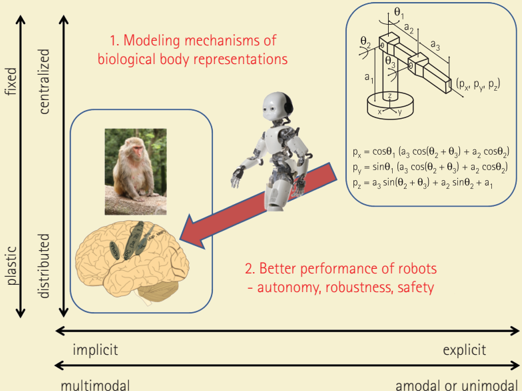
The diagram illustrates the relationship between modeling mechanisms of biological body representations and the performance of robots. It emphasizes how implicit, multimodal, and distributed biological representations contribute to enhanced autonomy, robustness, and safety in robotic systems. The diagram is divided into two main sections, with arrows and labels indicating the flow of information and the resulting performance improvements.
### Components/Axes
- **Vertical Axis (Left Side)**:
- Labels: "fixed", "centralized", "plastic", "distributed"
- Orientation: Top to bottom (fixed at the top, distributed at the bottom)
- **Horizontal Axis (Bottom)**:
- Labels: "implicit", "multimodal", "explicit", "amodal or unimodal"
- Orientation: Left to right (implicit on the left, amodal or unimodal on the right)
- **Main Diagram Elements**:
- **Section 1**: "Modeling mechanisms of biological body representations"
- Contains an image of a monkey and a human brain cross-section.
- Arrows point from the brain to a robot, indicating the influence of biological representations on robotic performance.
- **Section 2**: "Better performance of robots - autonomy, robustness, safety"
- Contains a robot with articulated joints and a mathematical representation of its position (px, py, pz).
- Equations describe the robot's position based on joint angles (θ1, θ2, θ3) and lengths (a1, a2, a3).
- **Mathematical Equations**:
- Position equations for the robot:
- \( p_x = \cos(\theta_1) \cdot (a_3 \cdot \cos(\theta_2 + \theta_3) + a_2 \cdot \cos(\theta_2)) \)
- \( p_y = \sin(\theta_1) \cdot (a_3 \cdot \cos(\theta_2 + \theta_3) + a_2 \cdot \cos(\theta_2)) \)
- \( p_z = a_3 \cdot \sin(\theta_2 + \theta_3) + a_2 \cdot \sin(\theta_2) + a_1 \)
### Detailed Analysis
- **Section 1**:
- The monkey and brain images represent biological systems with distributed and plastic representations.
- The arrows suggest that these biological mechanisms are modeled to improve robotic performance.
- **Section 2**:
- The robot's position is calculated using trigonometric functions based on joint angles and lengths.
- The equations imply a complex, multimodal representation of the robot's body, aligning with the distributed and plastic biological models.
### Key Observations
- The diagram emphasizes the importance of modeling biological systems with distributed and plastic representations to enhance robotic performance.
- The mathematical equations for the robot's position highlight the complexity and multimodal nature of robotic body representations.
- The use of both implicit and explicit representations (biological and mathematical) suggests a hybrid approach to improving robot autonomy, robustness, and safety.
### Interpretation
The diagram demonstrates that by modeling biological body representations with distributed and plastic characteristics, robots can achieve better performance in terms of autonomy, robustness, and safety. The mathematical equations for the robot's position indicate that a multimodal approach, combining implicit and explicit representations, is crucial for accurate and reliable robotic control. This suggests that understanding and replicating the complexity of biological systems can lead to significant advancements in robotics.