## Photograph: Automated Sorting System Test Setup
### Overview
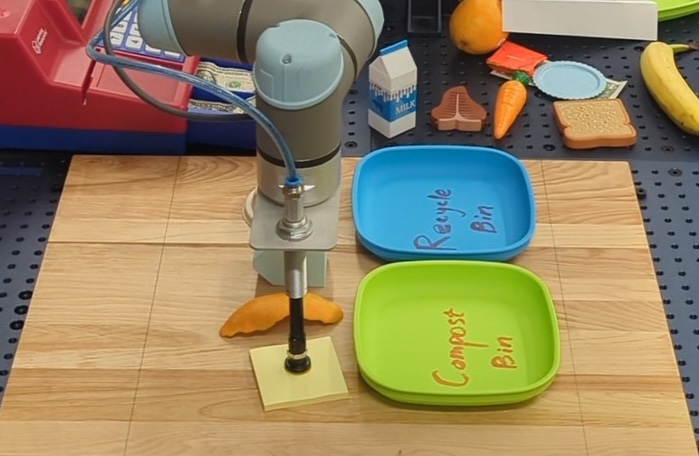
The image depicts a robotic arm positioned over two labeled bins ("Recycle Bin" and "Compost Bin") on a wooden surface. The setup includes various objects (e.g., banana, carrot, bread, milk carton) arranged in the background, suggesting a simulated waste-sorting environment. The robotic arm, equipped with a gripper, appears to be interacting with a yellow sticky note on the wooden board.
### Components/Axes
- **Robotic Arm**: Gray and light blue, with a blue cable extending from its base. Mounted on a metallic base with a black gripper.
- **Bins**:
- **Recycle Bin**: Blue, labeled in black text.
- **Compost Bin**: Green, labeled in orange text.
- **Objects**:
- Banana (top-right), carrot (center-right), bread slice (right-middle), milk carton (center), and a red cash register (top-left).
- **Surface**: Light brown wooden board with a grid-like pattern.
### Detailed Analysis
- **Robotic Arm**: Positioned centrally, oriented toward the bins. The gripper is lowered toward a yellow sticky note on the wooden board.
- **Bins**: Placed side-by-side on the wooden surface. The "Recycle Bin" is to the left of the "Compost Bin."
- **Background Objects**: Scattered across a dark perforated metal surface. Includes a banana (top-right), carrot (center-right), bread slice (right-middle), and a milk carton (center). A red cash register with a blue base is partially visible in the top-left corner.
### Key Observations
1. The robotic arm’s gripper is aligned with the yellow sticky note, suggesting a task involving object manipulation or placement.
2. The bins are clearly labeled, indicating a focus on waste categorization.
3. The background objects (banana, carrot, bread, milk carton) are common household items, likely used to simulate recyclable/compostable materials.
4. The cash register in the background may imply a retail or commercial context for the test.
### Interpretation
This setup likely demonstrates a proof-of-concept for an automated waste-sorting system. The robotic arm’s interaction with the sticky note could represent a step in object recognition or placement accuracy testing. The labeled bins and diverse objects suggest the system is designed to categorize items into recyclable or compostable streams. The presence of the cash register hints at a broader application in retail environments, where automated sorting could streamline waste management.
No numerical data, charts, or diagrams are present. The image focuses on physical components and their arrangement, with no textual content beyond the bin labels.