\n
## Data Table: Analysis/Theorem Provers Capabilities
### Overview
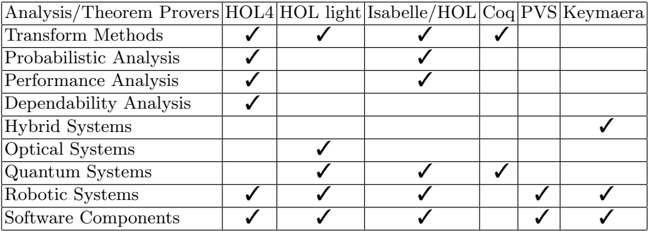
This image presents a data table comparing the capabilities of several theorem provers (HOL4, HOL light, Isabelle/HOL, Coq, PVS, and Keymaera) across different types of analysis. The table uses checkmarks to indicate which theorem provers support each analysis type.
### Components/Axes
* **Rows:** Represent different types of analysis: Transform Methods, Probabilistic Analysis, Performance Analysis, Dependability Analysis, Hybrid Systems, Optical Systems, Quantum Systems, Robotic Systems, and Software Components.
* **Columns:** Represent different theorem provers: HOL4, HOL light, Isabelle/HOL, Coq, PVS, and Keymaera.
* **Cells:** Contain a checkmark (✓) if the corresponding theorem prover supports the corresponding analysis type, and are empty otherwise.
### Detailed Analysis or Content Details
Here's a reconstruction of the data table's content:
| Analysis/Theorem Provers | HOL4 | HOL light | Isabelle/HOL | Coq | PVS | Keymaera |
|---|---|---|---|---|---|---|
| Transform Methods | ✓ | ✓ | ✓ | ✓ | | |
| Probabilistic Analysis | ✓ | | ✓ | | | |
| Performance Analysis | ✓ | | ✓ | | | |
| Dependability Analysis | ✓ | | | | | |
| Hybrid Systems | | | | | | ✓ |
| Optical Systems | | ✓ | | | | |
| Quantum Systems | | ✓ | ✓ | ✓ | | |
| Robotic Systems | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Software Components | ✓ | ✓ | ✓ | ✓ | | ✓ |
**Specific Observations:**
* **HOL4:** Supports Transform Methods, Probabilistic Analysis, Performance Analysis, Dependability Analysis, and Robotic/Software Components.
* **HOL light:** Supports Transform Methods, Optical Systems, Quantum Systems, and Robotic/Software Components.
* **Isabelle/HOL:** Supports Transform Methods, Probabilistic Analysis, Performance Analysis, Quantum Systems, Robotic Systems, and Software Components.
* **Coq:** Supports Transform Methods, Quantum Systems, and Robotic/Software Components.
* **PVS:** Supports Transform Methods and Robotic Systems.
* **Keymaera:** Supports Hybrid Systems and Robotic/Software Components.
### Key Observations
* Robotic Systems is the most widely supported analysis type, supported by all six theorem provers.
* Hybrid Systems is only supported by Keymaera.
* Optical Systems is only supported by HOL light.
* Dependability Analysis is only supported by HOL4.
* Transform Methods is supported by HOL4, HOL light, Isabelle/HOL, and Coq.
### Interpretation
The data suggests a varying degree of specialization among the theorem provers. HOL4 appears to be a versatile tool for a range of analyses, while HOL light excels in Optical and Quantum Systems. Isabelle/HOL offers broad support, particularly in areas like probabilistic and performance analysis. Coq is strong in Transform Methods and Quantum Systems. PVS is more limited in scope, focusing on Transform Methods and Robotic Systems. Keymaera is unique in its support for Hybrid Systems.
The table highlights the trade-offs between breadth and depth of capabilities. A theorem prover like HOL4 might be a good starting point for a variety of analyses, while a more specialized tool like Keymaera might be necessary for specific applications like Hybrid Systems verification. The choice of theorem prover will depend on the specific requirements of the analysis task.