## Diagram: Neurosymbolic Inference System with Probabilistic Background Knowledge
### Overview
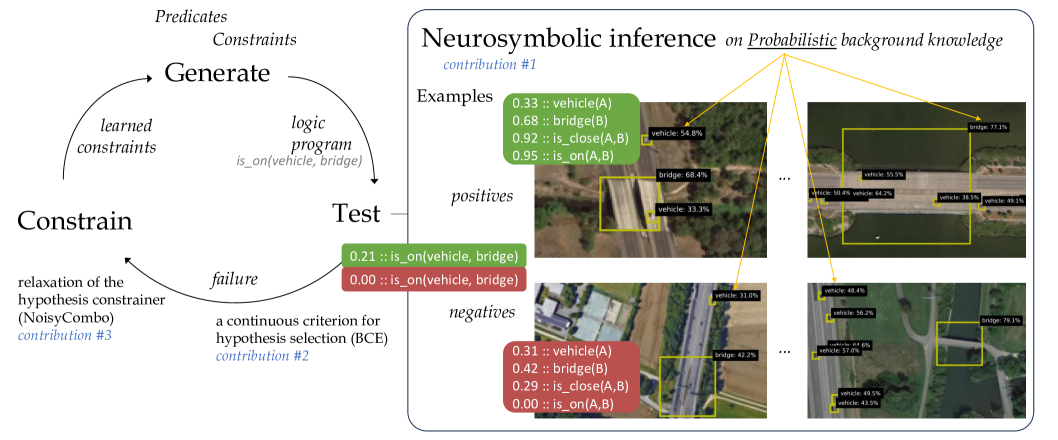
The image depicts a hybrid neurosymbolic inference system combining logic programming with probabilistic reasoning. It features a cyclical process for hypothesis generation and testing, alongside visual examples of object detection in aerial imagery. The system uses probabilistic background knowledge to constrain hypothesis selection and iteratively refines constraints based on test failures.
### Components/Axes
**Left Section (Flowchart):**
- **Nodes:**
- `Predicates` (top-left)
- `Constraints` (top-center)
- `Generate` (center)
- `Test` (right-center)
- `failure` (bottom-center)
- **Arrows:**
- `learned constraints` (from Constraints to Generate)
- `logic program` (from Generate to Test)
- `is_on(vehicle, bridge)` (example predicate)
- `relaxation of the hypothesis constrainer (NoisyCombo)` (from failure back to Constraints)
- **Labels:**
- `contribution #1` (near "Neurosymbolic inference")
- `contribution #2` (near "BCE")
- `contribution #3` (near "NoisyCombo")
**Right Section (Image Grid):**
- **Images:** Four aerial photographs showing roads, bridges, and vehicles.
- **Annotations:**
- **Green boxes (positives):**
- `0.33 :: vehicle(A)`
- `0.68 :: bridge(B)`
- `0.92 :: is_close(A,B)`
- `0.95 :: is_on(A,B)`
- **Red boxes (negatives):**
- `0.21 :: is_on(vehicle, bridge)`
- `0.00 :: is_on(vehicle, bridge)`
- `0.31 :: vehicle(A)`
- `0.42 :: bridge(B)`
- `0.29 :: is_close(A,B)`
- `0.00 :: is_on(A,B)`
- **Legend:**
- Green = positives
- Red = negatives
### Detailed Analysis
**Flowchart Process:**
1. **Hypothesis Generation:** Combines predicates (e.g., `is_on(vehicle, bridge)`) with learned constraints to produce logic programs.
2. **Testing:** Evaluates hypotheses against real-world data (aerial images).
3. **Failure Handling:** Relaxes constraints (via NoisyCombo) when tests fail, enabling iterative refinement.
**Image Annotations:**
- **Positive Examples (Green):** High-confidence detections (e.g., 0.95 for `is_on(A,B)`).
- **Negative Examples (Red):** Low-confidence or incorrect predictions (e.g., 0.00 for `is_on(vehicle, bridge)`).
- **Probabilistic Scores:** Percentages in bounding boxes (e.g., "vehicle: 54.8%") likely represent model confidence in detections.
### Key Observations
1. **Iterative Refinement:** The flowchart's cyclical nature suggests adaptive learning from failures.
2. **Confidence Thresholding:** Negative examples with 0.00 scores indicate strict filtering of low-confidence predictions.
3. **Spatial Relationships:** The `is_close` and `is_on` predicates highlight the system's ability to reason about object proximity and positioning.
4. **Probabilistic Grounding:** Percentages in images (e.g., "bridge: 77.1%") demonstrate integration of probabilistic background knowledge.
### Interpretation
This system bridges symbolic logic (e.g., `is_on(vehicle, bridge)`) with probabilistic reasoning, enabling robust object detection in complex aerial imagery. The iterative constraint relaxation (NoisyCombo) addresses noisy real-world data, while the BCE (Binary Cross-Entropy) criterion ensures only high-confidence hypotheses are retained. The visual examples show the system's ability to detect vehicles and bridges with varying confidence, though some cases (e.g., 0.00 scores) reveal limitations in handling ambiguous scenarios. The integration of learned constraints with probabilistic background knowledge suggests a framework for improving generalization in uncertain environments.