\n
## Diagram: Semantic Network of Scene Elements
### Overview
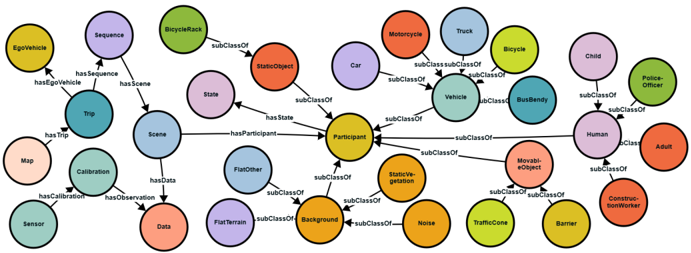
The image depicts a semantic network diagram illustrating relationships between various elements found in a scene, likely for computer vision or robotics applications. The diagram uses circles (nodes) to represent concepts and arrows to represent relationships between them. The central concept is "Participant," with branches extending to various categories like vehicles, humans, static objects, and background elements.
### Components/Axes
The diagram doesn't have traditional axes. Instead, it's organized around a central node ("Participant") with radiating connections. Key components and relationships are labeled on the arrows. The following concepts are present:
* **Egovehicle**
* **Sequence**
* **Trip**
* **Map**
* **Calibration**
* **Sensor**
* **Scene**
* **State**
* **StaticObject**
* **Participant**
* **FlatOther**
* **FlatTerrain**
* **Background**
* **StaticVegetation**
* **Noise**
* **TrafficCone**
* **Barrier**
* **Vehicle**
* **Motorcycle**
* **Truck**
* **Bicycle**
* **BusBendy**
* **Human**
* **Child**
* **PoliceOfficer**
* **Adult**
* **ConstructionWorker**
* **BicycleRack**
* **Data**
Relationships (arrow labels):
* `hasSequence`
* `hasScene`
* `hasTrip`
* `hasCalibration`
* `hasObservation`
* `hasState`
* `hasParticipant`
* `subClassOf`
### Detailed Analysis / Content Details
The diagram establishes a hierarchical structure. "Participant" is a central node, and many other nodes are defined as subclasses of it.
* **Egovehicle** `hasSequence` **Sequence**
* **Trip** `hasScene` **Scene**
* **Trip** `hasCalibration` **Calibration**
* **Map** `hasCalibration` **Calibration**
* **Sensor** `hasObservation` **Data**
* **Scene** `hasState` **State**
* **State** `subClassOf` **StaticObject**
* **StaticObject** `subClassOf` **Participant**
* **FlatOther** `subClassOf` **FlatTerrain**
* **FlatTerrain** `subClassOf` **Background**
* **Background** `subClassOf` **Participant**
* **StaticVegetation** `subClassOf` **StaticObject**
* **Noise** `subClassOf` **StaticVegetation**
* **TrafficCone** `subClassOf` **StaticVegetation**
* **Barrier** `subClassOf` **StaticVegetation**
* **Vehicle** `subClassOf` **Participant**
* **Motorcycle** `subClassOf` **Vehicle**
* **Truck** `subClassOf` **Vehicle**
* **Bicycle** `subClassOf` **Vehicle**
* **BusBendy** `subClassOf` **Vehicle**
* **Human** `subClassOf` **Participant**
* **Child** `subClassOf` **Human**
* **PoliceOfficer** `subClassOf` **Human**
* **Adult** `subClassOf` **Human**
* **ConstructionWorker** `subClassOf` **Human**
* **BicycleRack** `subClassOf` **StaticObject**
### Key Observations
The diagram emphasizes the categorization of scene elements. The "Participant" node is central, suggesting it's a key concept for understanding the scene. The relationships are primarily "subClassOf," indicating a taxonomic structure. The diagram appears to be designed for a system that needs to identify and classify objects within a scene. The inclusion of "Egovehicle," "Trip," and "Sensor" suggests a focus on autonomous navigation or robotic perception.
### Interpretation
This diagram represents a knowledge graph or ontology for scene understanding. It defines the types of objects and entities that might be present in a scene and how they relate to each other. The structure suggests a hierarchical approach to object recognition and classification. The diagram is likely used in a computer vision system to provide context and meaning to the objects detected in an image or video. For example, knowing that a "PoliceOfficer" is a type of "Human" and a "Participant" allows the system to infer potential behaviors and interactions. The inclusion of "Noise" and "StaticVegetation" suggests the system is designed to handle real-world complexities and uncertainties. The diagram is a formal representation of common sense knowledge about the world, tailored for a specific application (scene understanding). The diagram is a conceptual model, not a data visualization; it doesn't present numerical data or trends. It's a blueprint for how a system should *understand* the world.