## Diagram: Ontological Relationship Network
### Overview
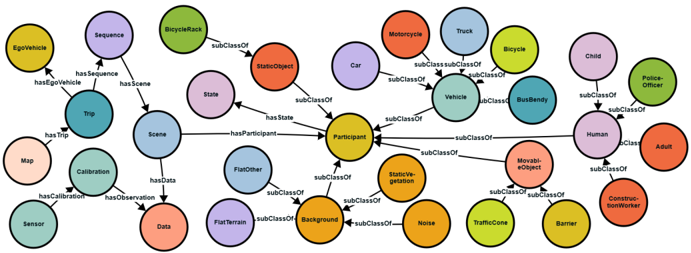
The image depicts a complex, interconnected network of nodes representing entities and their relationships. Nodes are color-coded and labeled with terms like "Vehicle," "Human," "Participant," and their subclasses. Arrows indicate directional relationships such as "subClassOf" and "hasSequence." The diagram appears to model an ontology or knowledge graph, illustrating hierarchical and associative connections between concepts.
### Components/Axes
- **Nodes**:
- **Central Nodes**:
- `Participant` (yellow)
- `Human` (purple)
- `Vehicle` (light blue)
- **Subclasses**:
- `Vehicle` → `Car`, `Truck`, `Bicycle`, `Motorcycle`, `BusBendy`
- `Human` → `Adult`, `Child`, `Police Officer`, `ConstructionWorker`
- `Participant` → `EgoVehicle`, `State`, `Scene`, `Data`, `Sensor`, `Calibration`, `Map`, `FlatOther`, `FlatTerrain`, `Background`, `Noise`, `TrafficCone`, `Barrier`, `StaticObject`, `MovableObject`, `StaticVegetation`, `BicycleRack`
- **Other Entities**:
- `Sequence`, `State`, `Scene`, `Data`, `Sensor`, `Calibration`, `Map`, `FlatOther`, `FlatTerrain`, `Background`, `Noise`, `TrafficCone`, `Barrier`, `StaticObject`, `MovableObject`, `StaticVegetation`, `BicycleRack`
- **Relationships**:
- **Subclassing**:
- `Bicycle` → `subClassOf` `Vehicle`
- `Car` → `subClassOf` `Vehicle`
- `Adult` → `subClassOf` `Human`
- `Child` → `subClassOf` `Human`
- `Police Officer` → `subClassOf` `Human`
- `ConstructionWorker` → `subClassOf` `Human`
- `EgoVehicle` → `hasSequence` `Trip`
- `Trip` → `hasSequence` `Sequence`
- `Scene` → `hasParticipant` `Participant`
- `Data` → `hasCalibration` `Calibration`
- `Sensor` → `hasCalibration` `Calibration`
- `FlatOther` → `subClassOf` `Background`
- `FlatTerrain` → `subClassOf` `Background`
- `Noise` → `subClassOf` `Background`
- `TrafficCone` → `subClassOf` `Background`
- `Barrier` → `subClassOf` `Background`
- `StaticObject` → `subClassOf` `Background`
- `MovableObject` → `subClassOf` `Background`
- `StaticVegetation` → `subClassOf` `Background`
- `BicycleRack` → `subClassOf` `StaticObject`
- **Colors**:
- `Vehicle`: Light blue
- `Human`: Purple
- `Participant`: Yellow
- `EgoVehicle`: Orange
- `State`: Pink
- `Scene`: Blue
- `Data`: Red
- `Sensor`: Teal
- `Calibration`: Light green
- `Map`: Beige
- `FlatOther`: Light blue
- `FlatTerrain`: Light green
- `Background`: Orange
- `Noise`: Dark orange
- `TrafficCone`: Yellow
- `Barrier`: Dark yellow
- `StaticObject`: Red
- `MovableObject`: Pink
- `StaticVegetation`: Green
- `BicycleRack`: Dark green
### Detailed Analysis
1. **Hierarchical Structure**:
- The diagram is organized into a hierarchy where broader categories (e.g., `Vehicle`, `Human`) branch into specific subclasses (e.g., `Car`, `Adult`).
- `Participant` acts as a central node, connecting to both `Human` and `Vehicle` through "subClassOf" relationships.
2. **Associative Relationships**:
- `EgoVehicle` is linked to `Trip` via "hasSequence," suggesting a temporal or sequential relationship.
- `Scene` contains `Participant`, indicating that participants are part of a scene.
- `Data` and `Sensor` are connected to `Calibration`, implying calibration is a prerequisite for data collection.
3. **Contextual Entities**:
- `Background` includes `FlatOther`, `FlatTerrain`, `Noise`, `TrafficCone`, and `Barrier`, suggesting these are environmental elements.
- `StaticObject` and `MovableObject` are subclasses of `Background`, distinguishing static and dynamic elements.
4. **Specialized Nodes**:
- `BicycleRack` is a subclass of `StaticObject`, indicating it is a fixed structure.
- `StaticVegetation` and `FlatTerrain` are part of the `Background`, representing natural or terrain features.
### Key Observations
- **Central Role of `Participant`**: The `Participant` node is the most connected, linking to both `Human` and `Vehicle`, suggesting it is a core concept in the ontology.
- **Subclassing Depth**: Many nodes (e.g., `Car`, `Adult`) are direct subclasses of broader categories, indicating a shallow but comprehensive hierarchy.
- **Environmental Context**: The `Background` category includes diverse elements (e.g., `Noise`, `TrafficCone`), highlighting the importance of environmental context in the model.
- **Data Flow**: Relationships like `Data` → `Calibration` and `Sensor` → `Calibration` suggest a workflow where calibration is critical for data validity.
### Interpretation
This diagram represents an ontology or knowledge graph for a system involving human and vehicle interactions. The relationships imply:
- **Hierarchical Classification**: Entities are organized into categories and subclasses, enabling structured reasoning (e.g., `Car` is a type of `Vehicle`).
- **Associative Logic**: Relationships like "hasSequence" and "hasParticipant" define how entities interact or coexist (e.g., a `Trip` involves a sequence of events and participants).
- **Environmental Awareness**: The inclusion of `Background` elements (e.g., `Noise`, `TrafficCone`) suggests the system accounts for real-world environmental factors.
- **Data Integrity**: The link between `Data`, `Sensor`, and `Calibration` emphasizes the importance of accurate data collection and processing.
The diagram likely serves as a foundational model for a system requiring precise categorization of entities, their relationships, and contextual factors. It could be used in applications like autonomous vehicle navigation, human-machine interaction, or environmental monitoring, where understanding the interplay between participants, vehicles, and their surroundings is critical.