## Diagram: Multiple Observations and World Models
### Overview
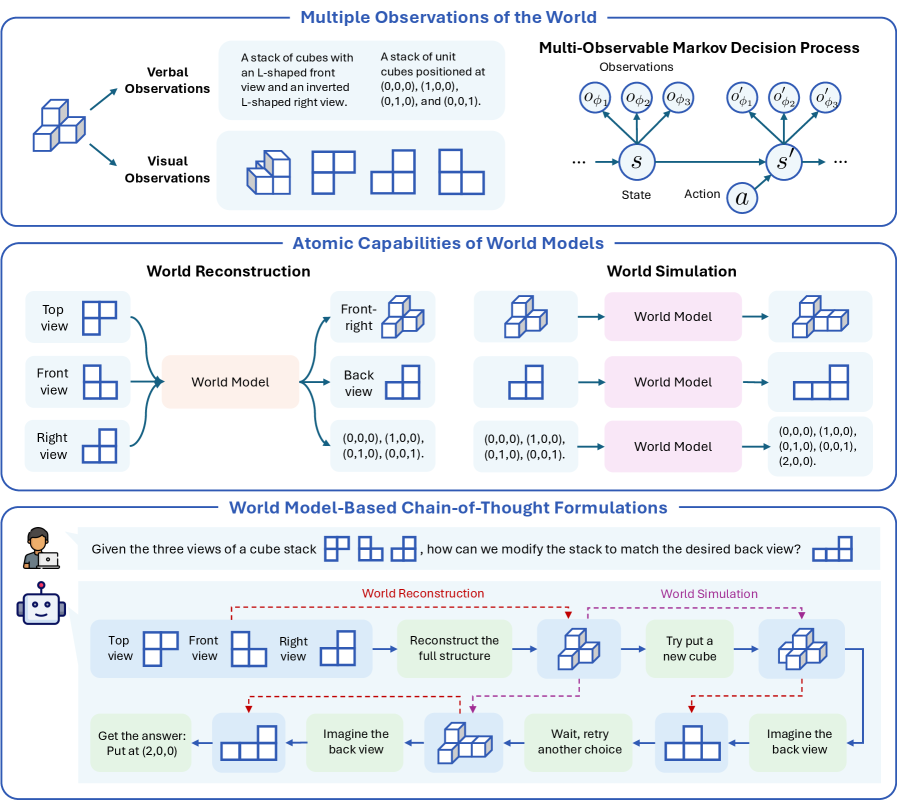
The image presents a series of diagrams illustrating different aspects of world observation, reconstruction, and simulation using cube stacks. It covers multiple observation types, Markov decision processes, atomic capabilities of world models, and chain-of-thought formulations.
### Components/Axes
**Section 1: Multiple Observations of the World**
* **Verbal Observations:** An arrow points from the text "Verbal Observations" to a 3D cube stack.
* **Visual Observations:** An arrow points from the text "Visual Observations" to a 2D representation of the same cube stack.
* **Cube Stack Description 1:** "A stack of cubes with an L-shaped front view and an inverted L-shaped right view." This is accompanied by 2D projections of the cube stack.
* **Cube Stack Description 2:** "A stack of unit cubes positioned at (0,0,0), (1,0,0), (0,1,0), and (0,0,1)." This is also accompanied by 2D projections of the cube stack.
* **Multi-Observable Markov Decision Process:**
* Observations: Oφ1, Oφ2, Oφ3, O'φ1, O'φ2, O'φ3
* States: S, S'
* Action: a
**Section 2: Atomic Capabilities of World Models**
* **World Reconstruction:**
* Top view: 2D projection of a cube stack.
* Front view: 2D projection of a cube stack.
* Right view: 2D projection of a cube stack.
* World Model: A pink box labeled "World Model".
* Front-right view: 3D projection of a cube stack.
* Back view: 2D projection of a cube stack.
* Coordinates: (0,0,0), (1,0,0), (0,1,0), (0,0,1).
* **World Simulation:**
* 3D projection of a cube stack.
* World Model: A pink box labeled "World Model".
* 3D projection of a cube stack.
* Coordinates: (0,0,0), (1,0,0), (0,1,0), (0,0,1), (2,0,0).
**Section 3: World Model-Based Chain-of-Thought Formulations**
* **Question:** "Given the three views of a cube stack [Top, Front, Right], how can we modify the stack to match the desired back view? [Back view]"
* **World Reconstruction:**
* Top view: 2D projection of a cube stack.
* Front view: 2D projection of a cube stack.
* Right view: 2D projection of a cube stack.
* Reconstruct the full structure: 3D projection of a cube stack.
* Imagine the back view: 2D projection of a cube stack.
* Get the answer: Put at (2,0,0): 2D projection of a cube stack.
* **World Simulation:**
* Try put a new cube: 3D projection of a cube stack.
* Wait, retry another choice: 2D projection of a cube stack.
* Imagine the back view: 2D projection of a cube stack.
### Detailed Analysis or ### Content Details
**Section 1:**
* The "Verbal Observations" and "Visual Observations" both refer to the same cube stack, suggesting two different ways of perceiving the same object.
* The "Multi-Observable Markov Decision Process" illustrates a state transition model with observations, states, and actions.
**Section 2:**
* "World Reconstruction" shows how different views of an object can be used to create a world model and then infer the back view.
* "World Simulation" shows how a world model can be used to simulate different configurations of the object.
**Section 3:**
* The "World Model-Based Chain-of-Thought Formulations" section presents a problem-solving approach using world models. It involves reconstructing the full structure from three views, imagining the back view, and then either putting a new cube or retrying another choice.
### Key Observations
* The diagrams use 2D and 3D projections to represent cube stacks.
* The "World Model" is a central component in both reconstruction and simulation.
* The chain-of-thought formulation involves iterative steps of reconstruction, simulation, and decision-making.
### Interpretation
The image illustrates the concept of building and using world models for object understanding and manipulation. It demonstrates how different observations can be integrated into a coherent model, and how this model can be used for tasks such as reconstructing hidden views or simulating the effects of actions. The chain-of-thought formulation highlights the iterative and reasoning-based nature of problem-solving using world models. The diagrams suggest a system that can perceive an object from multiple viewpoints, create an internal representation of it, and then use that representation to reason about its properties and how it can be modified.