## Diagram: Multi-Observational World Modeling and Decision-Making Framework
### Overview
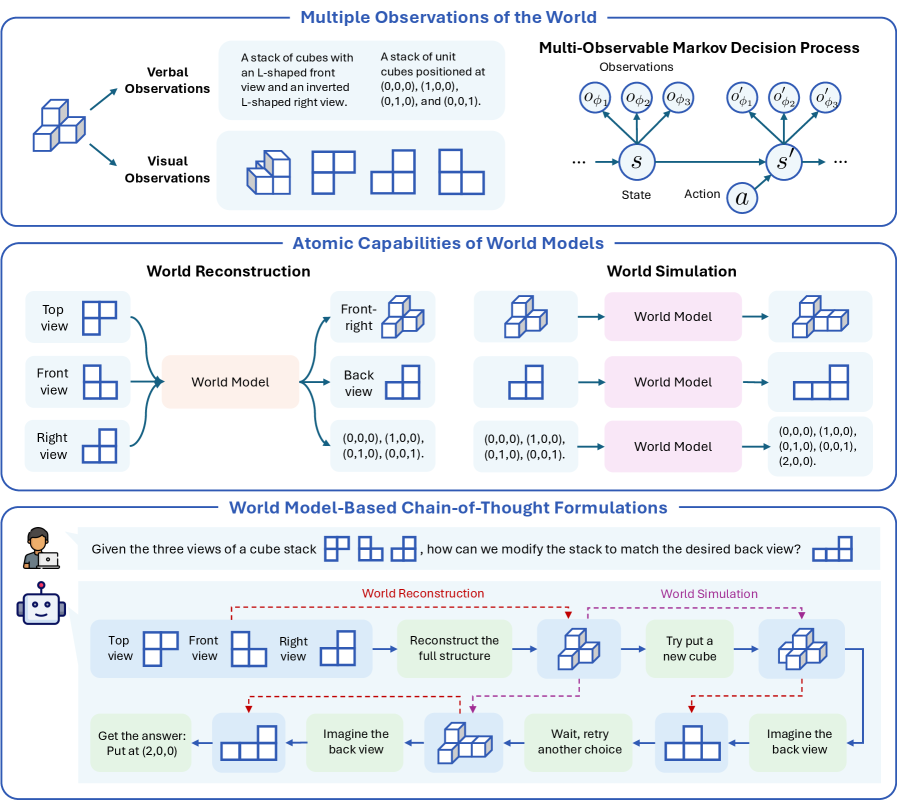
The image presents a technical framework for multi-observational world modeling, decision-making processes, and chain-of-thought reasoning. It combines visual-spatial reasoning with formal computational models, using cube-stack examples to illustrate concepts.
### Components/Axes
1. **Top Section: Multi-Observable Markov Decision Process**
- **Visual Elements**:
- Cube stack with labeled positions: (0,0,0), (1,0,0), (0,1,0), (0,0,1)
- L-shaped front view and inverted L-shaped right view
- **Textual Elements**:
- "Verbal Observations" (textual descriptions of cube positions)
- "Visual Observations" (diagrammatic representations)
- "Multi-Observable Markov Decision Process" (formal model with state transitions)
- **Key Symbols**:
- State (s) → Action (a) → Next State (s')
- Observations (oφ₁, oφ₂, oφ₃) and modified observations (o'φ₁, o'φ₂, o'φ₃)
2. **Middle Section: Atomic Capabilities of World Models**
- **Left Subsection: World Reconstruction**
- Input: Top view, Front view, Right view
- Output: Coordinate representations (e.g., (0,0,0), (1,0,0))
- **Right Subsection: World Simulation**
- Input: Coordinate representations
- Output: Modified cube configurations
- **Central Element**: "World Model" (black box processing inputs to outputs)
3. **Bottom Section: World Model-Based Chain-of-Thought Formulations**
- **Visual Flow**:
- Robot interface with cube stack
- Three-step process: Reconstruction → Simulation → Iterative Refinement
- **Key Text**:
- "Given the three views... how can we modify the stack to match the desired back view?"
- "Reconstruct the full structure" → "Try put a new cube" → "Wait, retry another choice"
### Detailed Analysis
1. **Multi-Observable Markov Decision Process**
- States represent cube configurations with positional coordinates
- Actions modify cube positions (e.g., adding/removing cubes)
- Observations (oφ) and modified observations (o'φ) show different perspective representations
2. **World Model Architecture**
- Takes three orthogonal views (top/front/right) as input
- Outputs 3D coordinate representations of cube positions
- Processes spatial relationships through formal coordinate systems
3. **Chain-of-Thought Workflow**
- Starts with visual observations (top/front/right views)
- Uses world model to reconstruct 3D structure
- Simulates cube additions/removals
- Iterates through multiple attempts to achieve target configuration
### Key Observations
1. **Spatial Reasoning Integration**
- Combines 2D visual observations with 3D coordinate representations
- Uses formal coordinate systems (x,y,z) for spatial reasoning
2. **Iterative Problem Solving**
- Demonstrates trial-and-error process in cube manipulation
- Shows feedback loop between simulation and observation
3. **Formal Model Components**
- Markov decision process framework for sequential decision making
- World model as central processing unit for spatial transformations
### Interpretation
This framework demonstrates how AI systems can integrate multiple sensory inputs (visual observations) with formal spatial reasoning (coordinate systems) to perform complex tasks. The cube-stack example illustrates:
1. **Perception**: Converting 2D views into 3D spatial understanding
2. **Reasoning**: Using world models to predict outcomes of actions
3. **Action**: Iteratively modifying the environment based on simulated outcomes
The Markov decision process component suggests a probabilistic approach to decision-making under uncertainty, while the chain-of-thought formulation emphasizes the importance of iterative refinement in complex problem-solving tasks. The system appears designed to handle tasks requiring both spatial reasoning and sequential decision-making capabilities.