# Technical Document Extraction: Robot-Human Interaction Diagram
## Diagram Overview
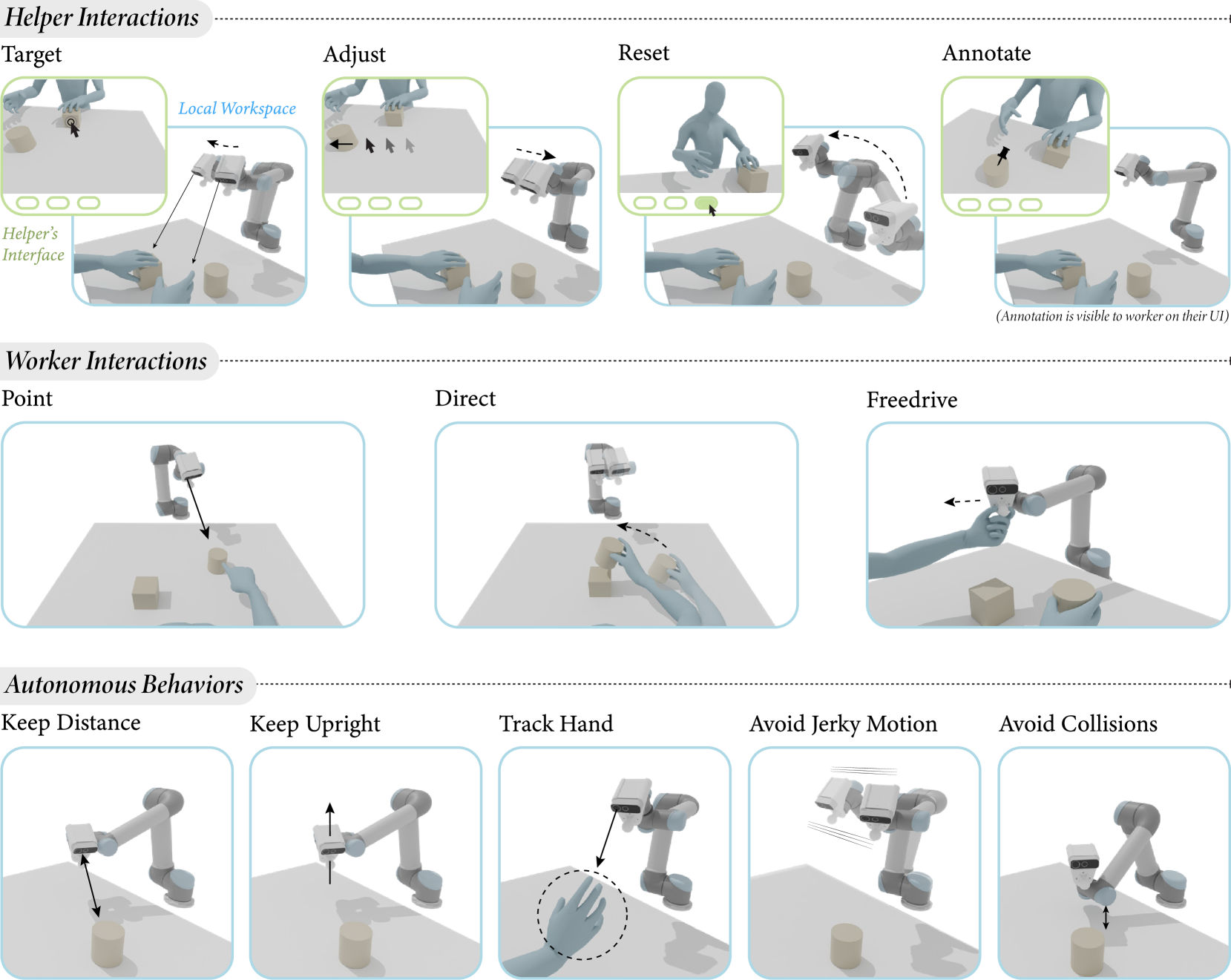
The image depicts a three-section technical diagram illustrating robot-human interaction protocols. Each section contains labeled components with directional arrows and spatial relationships. No numerical data or charts are present.
---
## 1. Helper Interactions
### Components:
- **Target**
- Label: "Local Workspace"
- Description: Work area with cylindrical and cubic objects
- Spatial: [x=0, y=0] (reference point)
- **Adjust**
- Label: "Local Workspace"
- Description: Three directional arrows (←, ↖, ↙) indicating adjustment options
- Spatial: [x=1, y=0]
- **Reset**
- Label: "Local Workspace"
- Description: Full workspace reset with object repositioning
- Spatial: [x=2, y=0]
- **Annotate**
- Label: "Local Workspace"
- Description: Annotation visibility note: "(Annotation is visible to worker on their UI)"
- Spatial: [x=3, y=0]
---
## 2. Worker Interactions
### Components:
- **Point**
- Label: "Point"
- Description: Targeting interaction with cylindrical object
- Spatial: [x=0, y=1]
- **Direct**
- Label: "Direct"
- Description: Coordinated movement of robotic arm and human hand
- Spatial: [x=1, y=1]
- **Freedrive**
- Label: "Freedrive"
- Description: Free-form manipulation with dual object handling
- Spatial: [x=2, y=1]
---
## 3. Autonomous Behaviors
### Components:
- **Keep Distance**
- Label: "Keep Distance"
- Description: Maintains minimum separation from cylindrical object
- Spatial: [x=0, y=2]
- **Keep Upright**
- Label: "Keep Upright"
- Description: Maintains vertical orientation during operation
- Spatial: [x=1, y=2]
- **Track Hand**
- Label: "Track Hand"
- Description: Follows human hand movement with circular trajectory indicator
- Spatial: [x=2, y=2]
- **Avoid Jerky Motion**
- Label: "Avoid Jerky Motion"
- Description: Smooth motion enforcement with velocity damping indicators (↺)
- Spatial: [x=3, y=2]
- **Avoid Collisions**
- Label: "Avoid Collisions"
- Description: Collision prevention with proximity warning system
- Spatial: [x=4, y=2]
---
## Spatial Grounding Analysis
- All components use consistent coordinate system with:
- X-axis: Left to right progression (Helper → Worker → Autonomous)
- Y-axis: Vertical stacking of interaction types
- Legend colors match component colors:
- Green: Helper Interactions
- Blue: Worker Interactions
- Gray: Autonomous Behaviors
## Trend Verification
- No numerical trends present; all components show static spatial relationships
- Directional arrows confirm interaction flow:
- Helper → Worker: Rightward progression
- Autonomous: Vertical stacking with lateral progression
## Component Isolation
1. **Header**: "Helper Interactions" section establishes initial interaction protocols
2. **Main Chart**: Three interaction types with spatial relationships
3. **Footer**: Five autonomous behaviors with motion constraints
---
## Critical Notes
1. No data tables or numerical values present
2. All textual information extracted from component labels and descriptions
3. Spatial coordinates provided as reference points only
4. Directional arrows serve as behavioral indicators rather than quantitative data