## Diagram: Robotic Arm Task Simulation
### Overview
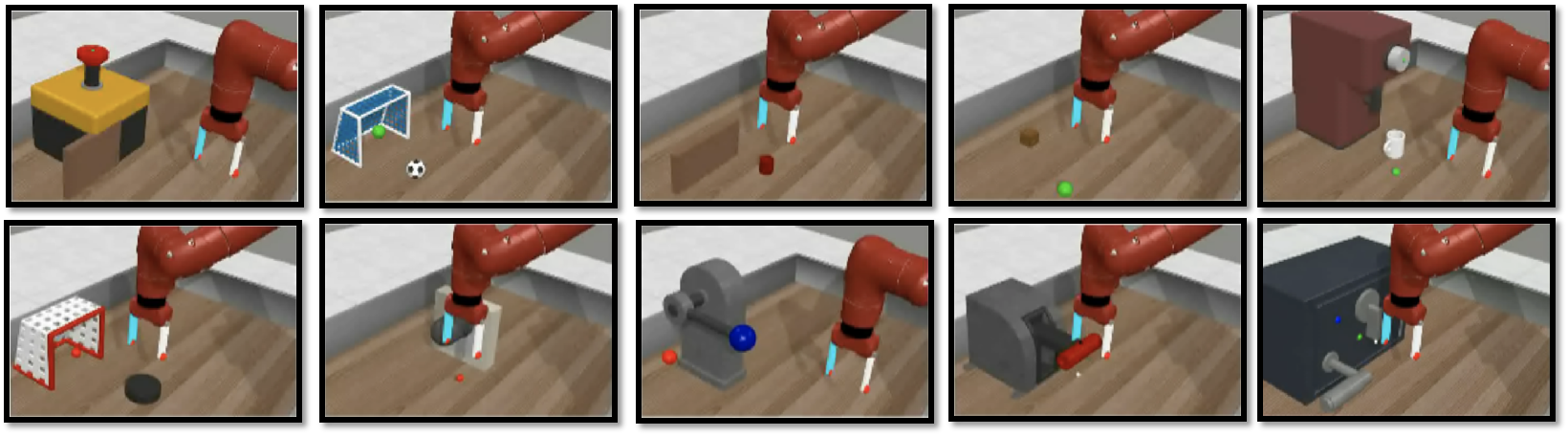
The image depicts a sequence of 10 panels arranged in two rows of five, illustrating a red robotic arm with blue and white grippers interacting with various objects in simulated environments. Each panel represents a distinct task, such as manipulating objects, picking up items, or interacting with machines. The robotic arm's movements and object interactions vary across panels, suggesting a demonstration of dexterity or task adaptability.
### Components/Axes
- **No textual labels, axis titles, legends, or axis markers** are present in the image.
- **Objects**:
- Yellow box with red knob (Panel 1, top row).
- Soccer goal with white frame and green ball (Panel 2, top row).
- Brown box with red cylinder (Panel 3, top row).
- Brown box with green ball (Panel 4, top row).
- Brown machine with white knob and green ball (Panel 5, top row).
- White goal with red frame and black disc (Panel 1, bottom row).
- Gray box with red cylinder (Panel 2, bottom row).
- Gray machine with blue knob and red ball (Panel 3, bottom row).
- Gray machine with red cylinder and white disc (Panel 4, bottom row).
- Black safe with gray handle and blue knob (Panel 5, bottom row).
### Detailed Analysis
- **Panel 1 (Top Row)**: Robotic arm approaches a yellow box with a red knob, possibly simulating a task involving object manipulation or activation.
- **Panel 2 (Top Row)**: Arm interacts with a soccer goal, suggesting a task requiring precision or coordination.
- **Panel 3 (Top Row)**: Arm engages with a brown box containing a red cylinder, potentially testing grasping or lifting capabilities.
- **Panel 4 (Top Row)**: Arm interacts with a green ball on a brown box, indicating object retrieval or placement.
- **Panel 5 (Top Row)**: Arm approaches a brown machine with a white knob and green ball, simulating interaction with industrial equipment.
- **Panel 1 (Bottom Row)**: Arm manipulates a white goal with a red frame and black disc, possibly testing dynamic object handling.
- **Panel 2 (Bottom Row)**: Arm interacts with a gray box containing a red cylinder, mirroring Panel 3 but with a different container.
- **Panel 3 (Bottom Row)**: Arm engages with a gray machine featuring a blue knob and red ball, highlighting adaptability to varied machinery.
- **Panel 4 (Bottom Row)**: Arm interacts with a gray machine holding a red cylinder and white disc, suggesting multi-object coordination.
- **Panel 5 (Bottom Row)**: Arm approaches a black safe with a gray handle and blue knob, simulating security-related tasks.
### Key Observations
- The robotic arm’s grippers (blue and white) consistently target objects with contrasting colors (e.g., red, green, blue), emphasizing visual or tactile discrimination.
- Tasks range from simple object retrieval (e.g., green ball) to complex interactions (e.g., safe with handle and knob).
- No numerical data or trends are present; the focus is on qualitative task execution.
### Interpretation
The image demonstrates the robotic arm’s versatility in handling diverse objects and environments, likely for training, testing, or showcasing capabilities in robotics. Each panel isolates a specific task, suggesting a modular approach to evaluating performance. The absence of numerical data implies the focus is on qualitative assessment (e.g., success/failure of interactions) rather than quantitative metrics. The variety of objects (boxes, machines, safes) indicates potential applications in industrial automation, logistics, or security systems.