\n
## Image Series: Robotic Arm Manipulation
### Overview
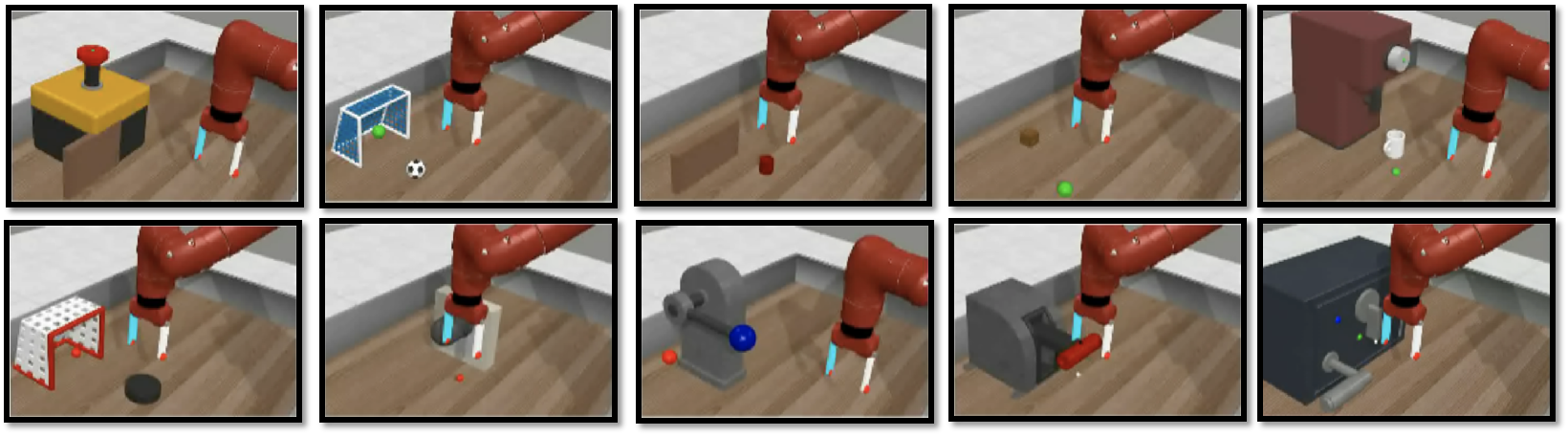
The image consists of a 3x3 grid of screenshots depicting a robotic arm interacting with various objects in a simulated environment. Each screenshot shows a different scenario, likely demonstrating the arm's capabilities in grasping, moving, and manipulating objects of different shapes, sizes, and materials. There are no axes, legends, or numerical data present. This is a visual demonstration, not a data presentation.
### Components/Axes
There are no axes or legends. The primary components are:
* **Robotic Arm:** A red, multi-jointed robotic arm is present in all images.
* **Objects:** A variety of objects are present, including:
* Yellow block
* Blue cube/frame
* Red cylinder
* Brown/tan irregular shape
* White sphere
* Red brick-like structure
* Black sphere
* Blue sphere
* Gray block
* Black object with a handle
* **Surface:** A wooden-textured surface is visible in all images, serving as the workspace.
### Detailed Analysis / Content Details
Here's a description of each image, moving left-to-right, top-to-bottom:
1. **Top-Left:** The robotic arm is positioned above a yellow block on a brown base. The arm appears to be in a grasping position.
2. **Top-Center:** The robotic arm is positioned near a blue cube-like frame and a black sphere. The arm is extended.
3. **Top-Right:** The robotic arm is positioned above a red cylinder and a small green sphere. The arm is in a grasping position.
4. **Middle-Left:** The robotic arm is positioned above a red brick-like structure and a black sphere. The arm is in a grasping position.
5. **Middle-Center:** The robotic arm is positioned above a flat, gray surface with a small indentation. The arm is extended.
6. **Middle-Right:** The robotic arm is positioned above a gray block and a blue sphere. The arm is in a grasping position.
7. **Bottom-Left:** The robotic arm is positioned above a red brick-like structure and a black sphere. The arm is in a grasping position.
8. **Bottom-Center:** The robotic arm is positioned above a gray block. The arm is extended.
9. **Bottom-Right:** The robotic arm is positioned above a black object with a handle. The arm is in a grasping position.
### Key Observations
* The robotic arm consistently appears to be either grasping or positioned to grasp an object.
* The objects vary significantly in shape, size, and color.
* The environment appears to be a simulated workspace.
* The arm's configuration changes to accommodate the different objects and their positions.
### Interpretation
This image series likely demonstrates the versatility of the robotic arm in a simulated environment. The different scenarios showcase the arm's ability to handle a variety of objects, suggesting its potential for use in tasks such as pick-and-place operations, assembly, or material handling. The consistent grasping/positioning suggests a focus on demonstrating the arm's manipulation capabilities. The lack of any quantitative data suggests this is a qualitative demonstration of functionality rather than a performance evaluation. The simulation environment allows for testing and visualization without the constraints of a real-world setup. The variety of objects suggests the arm is designed to be adaptable to different tasks and environments.