## Image Grid: Dataset Examples
### Overview
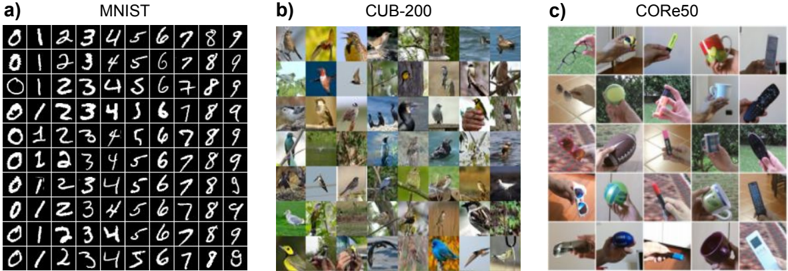
The image presents a grid of example images from three different datasets commonly used in machine learning: MNIST, CUB-200, and CORe50. Each dataset is represented by a 10x10 grid of sample images.
### Components/Axes
* **a) MNIST:** A 10x10 grid of handwritten digits (0-9) on a black background. The title "MNIST" is above the grid.
* **b) CUB-200:** A 10x10 grid of images of different bird species. The title "CUB-200" is above the grid.
* **c) CORe50:** A 5x4 grid of images showing various objects being manipulated by hands. The title "CORe50" is above the grid.
### Detailed Analysis
**a) MNIST:**
* The grid consists of 10 rows and 10 columns.
* Each row represents a different digit from 0 to 9.
* Each image is a 28x28 pixel grayscale image of a handwritten digit.
* The digits are centered within each image.
**b) CUB-200:**
* The grid consists of 10 rows and 10 columns.
* Each image is a color image of a bird.
* The images show birds in various poses and environments.
* The image quality varies.
**c) CORe50:**
* The grid consists of 5 rows and 4 columns.
* Each image is a color image of a hand interacting with an object.
* The objects include items like glasses, mugs, pens, phones, and balls.
* The backgrounds vary.
### Key Observations
* The MNIST dataset consists of simple, grayscale images of handwritten digits.
* The CUB-200 dataset consists of more complex, color images of birds.
* The CORe50 dataset consists of color images of hands interacting with objects, representing a more complex and realistic scenario.
### Interpretation
The image provides a visual comparison of three different datasets used in machine learning. The datasets vary in terms of image complexity, color, and the type of objects depicted. MNIST is a relatively simple dataset used for introductory machine learning tasks, while CUB-200 and CORe50 are more complex datasets used for more advanced tasks such as image classification and object recognition. The CORe50 dataset is particularly interesting as it represents a more realistic scenario with hands interacting with objects, which is relevant to robotics and human-computer interaction.