## Semantic Segmentation Results
### Overview
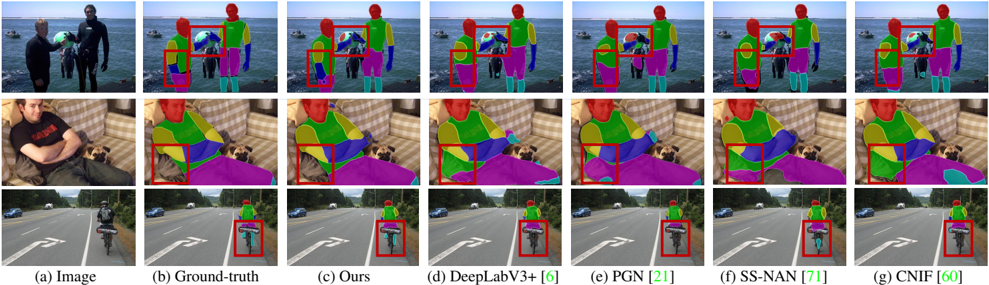
The image presents a comparison of semantic segmentation results on three different scenes. The first column shows the original images, followed by the ground truth segmentation, and then the results of four different models: "Ours", "DeepLabV3+ [6]", "PGN [21]", "SS-NAN [71]", and "CNIF [60]". Each row represents a different scene. The segmentation results are visualized using different colors to represent different semantic categories. Red bounding boxes highlight regions of interest in the segmentation results.
### Components/Axes
* **Columns:**
* (a) Image: Original image
* (b) Ground-truth: Manually labeled segmentation
* (c) Ours: Segmentation result from the model "Ours"
* (d) DeepLabV3+ [6]: Segmentation result from the DeepLabV3+ model, with citation [6]
* (e) PGN [21]: Segmentation result from the PGN model, with citation [21]
* (f) SS-NAN [71]: Segmentation result from the SS-NAN model, with citation [71]
* (g) CNIF [60]: Segmentation result from the CNIF model, with citation [60]
* **Rows:**
* Row 1: Scene with people on a beach
* Row 2: Scene with a person and a dog indoors
* Row 3: Scene with a cyclist on a road
### Detailed Analysis or ### Content Details
**Row 1: Beach Scene**
* **(a) Image:** Two people are standing on a beach, with a body of water and boats in the background. One person is handing the other a green object.
* **(b) Ground-truth:** The people, water, and boats are segmented with different colors.
* **(c) Ours:** The segmentation is similar to the ground truth, but with some differences in the boundaries. A red bounding box highlights the torso and arm of one of the people.
* **(d) DeepLabV3+ [6]:** Similar segmentation to "Ours", with a red bounding box around the torso and arm of one of the people.
* **(e) PGN [21]:** Similar segmentation to "Ours" and "DeepLabV3+ [6]", with a red bounding box around the torso and arm of one of the people.
* **(f) SS-NAN [71]:** Similar segmentation to "Ours", "DeepLabV3+ [6]", and "PGN [21]", with a red bounding box around the torso and arm of one of the people.
* **(g) CNIF [60]:** Similar segmentation to "Ours", "DeepLabV3+ [6]", "PGN [21]", and "SS-NAN [71]", with a red bounding box around the torso and arm of one of the people.
**Row 2: Indoor Scene**
* **(a) Image:** A person is lying on a couch with a dog.
* **(b) Ground-truth:** The person, dog, couch, and blanket are segmented with different colors.
* **(c) Ours:** The segmentation is similar to the ground truth, but with some differences in the boundaries. A red bounding box highlights the person's arm and the blanket.
* **(d) DeepLabV3+ [6]:** Similar segmentation to "Ours", with a red bounding box around the person's arm and the blanket.
* **(e) PGN [21]:** Similar segmentation to "Ours" and "DeepLabV3+ [6]", with a red bounding box around the person's arm and the blanket.
* **(f) SS-NAN [71]:** Similar segmentation to "Ours", "DeepLabV3+ [6]", and "PGN [21]", with a red bounding box around the person's arm and the blanket.
* **(g) CNIF [60]:** Similar segmentation to "Ours", "DeepLabV3+ [6]", "PGN [21]", and "SS-NAN [71]", with a red bounding box around the person's arm and the blanket.
**Row 3: Road Scene**
* **(a) Image:** A cyclist is riding on a road.
* **(b) Ground-truth:** The cyclist, road, and surrounding environment are segmented with different colors.
* **(c) Ours:** The segmentation is similar to the ground truth, but with some differences in the boundaries. A red bounding box highlights the cyclist.
* **(d) DeepLabV3+ [6]:** Similar segmentation to "Ours", with a red bounding box around the cyclist.
* **(e) PGN [21]:** Similar segmentation to "Ours" and "DeepLabV3+ [6]", with a red bounding box around the cyclist.
* **(f) SS-NAN [71]:** Similar segmentation to "Ours", "DeepLabV3+ [6]", and "PGN [21]", with a red bounding box around the cyclist.
* **(g) CNIF [60]:** Similar segmentation to "Ours", "DeepLabV3+ [6]", "PGN [21]", and "SS-NAN [71]", with a red bounding box around the cyclist.
### Key Observations
* The image compares the performance of different semantic segmentation models on different scenes.
* The red bounding boxes highlight regions where the segmentation results may be of particular interest or where there are differences between the models.
* The models "Ours", "DeepLabV3+ [6]", "PGN [21]", "SS-NAN [71]", and "CNIF [60]" produce generally similar segmentation results.
### Interpretation
The image demonstrates the capabilities of different semantic segmentation models in various scenarios. The comparison with the ground truth allows for a visual assessment of the accuracy of each model. The highlighted regions draw attention to areas where the models may struggle or where their performance differs. The overall similarity in the results suggests that these models are relatively robust and can effectively segment different types of scenes. The citations ([6], [21], [71], [60]) indicate that these are established models in the field of semantic segmentation.