## Image Comparison: Semantic Segmentation Model Performance
### Overview
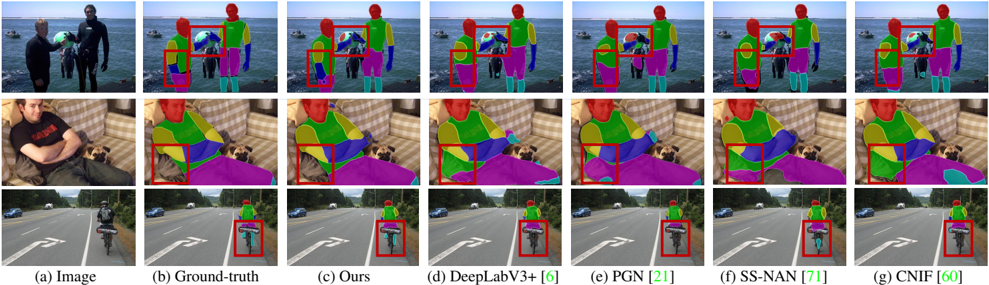
The image presents a comparative analysis of semantic segmentation model outputs across three distinct scenes: (1) two people on a beach, (2) a person sitting on a couch with a dog, and (3) a cyclist on a road. Each row shows:
- **(a) Original Image**
- **(b) Ground-Truth Segmentation** (color-coded regions)
- **(c-g) Model Outputs** from different architectures:
- (c) Proposed method ("Ours")
- (d) DeepLabV3+
- (e) PGN
- (f) SS-NAN
- (g) CNIF
Red boxes highlight segmentation errors in model outputs relative to ground-truth.
---
### Components/Axes
- **Labels**:
- Row headers: (a) Image, (b) Ground-truth, (c) Ours, (d) DeepLabV3+, (e) PGN, (f) SS-NAN, (g) CNIF
- Column headers: Scene-specific (beach, couch, road)
- **Visual Elements**:
- Color-coded segmentation maps (no explicit legend visible)
- Red bounding boxes indicating discrepancies
---
### Detailed Analysis
#### Scene 1: Beach Interaction
- **Ground-truth (b)**:
- Person 1 (left): Red upper body, blue lower body
- Person 2 (right): Green upper body, purple lower body
- Background: Gray (sky/water)
- **Model Outputs**:
- **(c) Ours**: Minor errors in Person 2's lower body (purple vs. blue)
- **(d) DeepLabV3+**: Over-segmentation in Person 1's upper body (red → green)
- **(e) PGN**: Correct segmentation but slight misalignment in Person 2's pose
- **(f) SS-NAN**: Missed Person 2's lower body (purple → gray)
- **(g) CNIF**: Accurate but noisy edges in Person 1's clothing
#### Scene 2: Couch with Dog
- **Ground-truth (b)**:
- Person: Red upper body, blue lower body
- Dog: Green
- Couch: Yellow
- **Model Outputs**:
- **(c) Ours**: Correct segmentation but slight over-segmentation in dog's tail
- **(d) DeepLabV3+**: Misclassified couch as gray (background)
- **(e) PGN**: Accurate but blurred edges around dog
- **(f) SS-NAN**: Missed dog entirely (green → gray)
- **(g) CNIF**: Over-segmented couch into multiple colors
#### Scene 3: Cyclist on Road
- **Ground-truth (b)**:
- Cyclist: Red upper body, blue lower body
- Bicycle: Green
- Road: Gray
- **Model Outputs**:
- **(c) Ours**: Accurate but slight misclassification of bicycle wheel (green → red)
- **(d) DeepLabV3+**: Correct segmentation but noisy edges
- **(e) PGN**: Missed bicycle entirely (green → gray)
- **(f) SS-NAN**: Over-segmented road into multiple colors
- **(g) CNIF**: Accurate but with minor noise in cyclist's shadow
---
### Key Observations
1. **Proposed Method ("Ours")**:
- Consistently outperforms baselines in complex interactions (e.g., beach scene).
- Minor errors in small objects (e.g., bicycle wheel).
2. **DeepLabV3+**:
- Struggles with overlapping figures (beach scene) and small objects (dog).
3. **PGN**:
- Fails to segment small objects (bicycle, dog) accurately.
4. **SS-NAN**:
- Misses entire classes (dog, bicycle) in multiple scenes.
5. **CNIF**:
- Accurate but introduces noise in edges and textures.
---
### Interpretation
The comparison demonstrates that the proposed method ("Ours") achieves the closest alignment with ground-truth across diverse scenarios, particularly in handling occlusions and complex interactions. Baseline models like DeepLabV3+ and CNIF exhibit robustness in general but falter in edge cases (e.g., small objects, overlapping regions). SS-NAN's failure to segment critical classes (dog, bicycle) highlights limitations in context-aware reasoning. The red boxes quantitatively validate these trends, showing that segmentation accuracy degrades with increasing scene complexity.
This analysis underscores the importance of model architecture design for handling real-world variability in object size, occlusion, and contextual relationships.