# Relaxed Binaural LCMV Beamforming
**Authors**: Andreas I. Koutrouvelis, Richard C. Hendriks, Richard Heusdens, Jesper Jensen
## Relaxed Binaural LCMV Beamforming
Andreas I. Koutrouvelis, Richard C. Hendriks, Richard Heusdens and Jesper Jensen
Abstract -In this paper we propose a new binaural beamforming technique which can be seen as a relaxation of the linearly constrained minimum variance (LCMV) framework. The proposed method can achieve simultaneous noise reduction and exact binaural cue preservation of the target source, similar to the binaural minimum variance distortionless response (BMVDR) method. However, unlike BMVDR, the proposed method is also able to preserve the binaural cues of multiple interferers to a certain predefined accuracy. Specifically, it is able to control the trade-off between noise reduction and binaural cue preservation of the interferers by using a separate trade-off parameter perinterferer. Moreover, we provide a robust way of selecting these trade-off parameters in such a way that the preservation accuracy for the binaural cues of the interferers is always better than the corresponding ones of the BMVDR. The relaxation of the constraints in the proposed method achieves approximate binaural cue preservation of more interferers than other previously presented LCMV-based binaural beamforming methods that use strict equality constraints.
Index Terms -Binaural cue preservation, beamforming, hearing aids, LCMV, multi-microphone noise reduction, MVDR.
## I. INTRODUCTION
Traditionally, hearing aids have been fitted bilaterally , i.e., the user wears a hearing aid on each ear, and the hearing aids are operating essentially independently of each other. As such, the noise reduction algorithm in each hearing aid estimates the signal of interest using only the recordings of the microphones from that specific hearing aid [9]. Such a setup with an independent multi-microphone algorithm per ear may severely distort the binaural cues since phase and magnitude relations of the sources reaching the two ears are modified [10]. This is harmful for the naturalness of the total sound field as received by the hearing-aid user. Ideally, all sound sources (including the undesired ones) that are present after processing should still sound as if originating from the original direction. This does not only lead to a more natural
C OMPARED to normal-hearing people, hearing-impaired people generally have more difficulties in understanding a target talker in complex acoustic environments with multiple interfering sources. To improve speech quality and intelligibility, single-microphone (see e.g. [1] for an overview) or multimicrophone noise reduction algorithms (see e.g., [2] for an overview) can be used. While the former are mostly effective in improving speech quality and reducing listening effort, the latter are also effective in improving speech intelligibility [3]. Examples of multi-microphone noise reduction algorithms include the multi-channel Wiener filter (MWF) [4], [5], the minimum variance distrortionless response (MVDR) beamformer [6], [7], or, its generalization, the linearly constrained minimum variance (LCMV) beamformer [7], [8].
This work was supported by the Oticon Foundation and the Dutch Technology Foundation STW.
perception of the acoustic environment, but can also lead to an improved intelligibility of a target speaker in certain cases; more specifically, in spatial unmasking experiments [11] it has been shown that a target speaker in a noisy background is significantly easier to understand when the noise sources are separated in space from the speaker, as compared to the situation where speaker and noise sources are co-located.
The LCMV algorithm [7], [8] minimizes the output power of the noise under multiple linear equality constraints. One of these equality constraints is typically used to guarantee that the target source remains undistorted with respect to a certain reference location or microphone. The remaining constraints can be used as additional degrees of freedom in designing the final filter. For example, it can be used to steer nulls in the directions of the interferers [7], [12], or to broaden the beam towards the target source in order to avoid pointing error problems, also known as steering vector mismatches [13], [14]. A special case of the LCMV method is the minimum variance distortionless response (MVDR) beamformer, which only uses the distortionless constraint of the target source [6], [7].
Binaural hearing aids are able to wirelessly exchange microphone signals between hearing aids. This facilitates the use of multi-microphone noise reduction algorithms which combine all microphone recordings from both hearing aids, hence allowing the usage of more microphone recordings than with the bilateral noise reduction. As such, the increased number of microphone recordings can potentially lead to better noise suppression and, thus, to a higher speech intelligibility. Moreover, by introducing proper constraints on the beamformer coefficients, binaural cue preservation of the sources can be achieved.
An alternative multi-microphone noise reduction method is the MWF which leads to the minimum mean square error (MMSE) estimate of the target source if the estimator is constrained to be linear, or, the target source and the noise are assumed to be jointly Gaussian distributed [15]. However, in [16]-[18], it was demonstrated that speech signals in time and frequency domains tend to be super-Gaussian distributed rather than Gaussian distributed. Thus, the MWF is generally not MMSE optimal. The MWF does not include a distortionless constraint for the target source and, thus, it generally introduces speech distortion in the output [4]. Several generalizations of the MWF have been proposed, among which the speech distortion weighted MWF (SDWMWF) [5], which introduces a parameter in the minimization procedure to control the trade-off between speech distortion and noise reduction. A well-known property of the MWF is the fact that it can be decomposed into an MVDR beamformer and a single-channel Wiener filter as a post-processor [19]. Notice that this holds in general, also if the filter is not constrained to be linear and the target source is not assumed to be Gaussian
distributed [15].
The binaural version of the SDW-MWF (BSDWMWF) [21], [22] preserves the binaural cues of the target. However, it was theoretically proven that the binaural cues of the interferers collapse on the binaural cues of the target source [23] (i.e., after processing the binaural cues of the interferers become identical to the binaural cues of the target source). In [22], a variation of the BSDW-MWF (called BSDW-MWF-N) was proposed which tries to partially preserve the binaural cues of the interferers. This method inserts a portion of the unprocessed noisy signal at the reference microphones to the coresponding BSDW-MWF enhanced signals. The larger the portion of the unprocessed noisy signals, the lower the noise reduction, but the better the preservation of binaural cues of the interferers and vice versa. As such, this solution exhibits a trade-off between the preservation of binaural cues and the amount of noise reduction. In [24], a subjective evaluation of BSDW-MWF and BSDW-MWF-N shows that for a moderate input SNR indeed the subjects localized the processed interferer correctly with BSDW-MWF-N and incorrectly with BSDW-MWF. However, for a small input SNR the processed interferer was also localized correctly for BSDW-MWF. This is mainly due to the inaccurate estimates of the cross power spectral density (CPSD) matrix of the target, and due to masking effects when the processed target and processed interferer are represented to the subjects simultaneously [24]. In [25], two other variations of the BSDW-MWF were proposed. The first one is capable of preserving the binaural cues of the target and completely cancel one interferer. The second one is capable of accurately preserving the binaural cues of only one interferer, while distorting the binaural cues of the target.
There are several binaural multi-microphone noise reduction methods known from the literature. These can be devided into two main categories [20]: a) methods based on the linearly constrained minimum variance (LCMV) framework and b) methods based on the multi-channel Wiener filter (MWF).
Similarly to SDW-MWF, the BSDW-MWF can be decomposed into the binaural MVDR (BMVDR) beamformer and a single-channel Wiener filter [25]. The BMVDR can preserve the binaural cues of the target source, but the binaural cues of the interferers collapse to the binaural cues of the target source. In [26], [27], the binaural linearly constrained minimum variance (BLCMV) algorithm was proposed, which achieves simultaneous noise reduction and binaural cue preservation of the target source and multiple interferers. Unlike the BMVDR, the BLCMV uses two additional linear constraints per interferer to preserve its binaural cues. A fixed interference rejection parameter is used in combination with these constraints to control the amount of noise reduction. The BLCMV is thus capable of controlling the amount of noise reduction using two constraints per interferer. However, in hearing-aid systems with a rather limited number of microphones, the degrees of freedom for noise reduction are exhausted quickly when increasing the number of interferers. This makes the BLCMV less suitable for this application.
In [28], a similar method to BLCMV, called optimal BLCMV (OBLCMV), was proposed which is able to achieve simultaneous noise reduction and binaural cue preservation of the target source and only one interferer. Unlike the BLCMV, the OBLCMV uses an optimal interference rejection parameter with respect to the binaural output SNR. In [29], [30] two independent works proposed the same LCMV-based method (we call it joint BLCMV (JBLCMV)) as an alternative to the BLCMV, which preserves the binaural cues of the target source and more than twice the number of interferers compared to the BLCMV [29]. Unlike the BLCMV, the JBLCMV requires only one linear constraint per interferer and, as a result, it has more degrees of freedom left for noise reduction. The linear constraints for the preservation of the binaural cues of the interferers have the same form as the linear constraint used in [25]. However, unlike the method in [25], the JBLCMV can preserve the binaural cues of a limited number of interferers and does not distort the binaural cues of the target source.
The remainder of this paper is organized as follows. In Section II, the signal model and the notation are presented. In Section III the key idea of the binaural beamforming is explained and several existing binaural LCMV-based algorithms are summarized. In Sections IV and V, a novel nonconvex binaural beamforming problem and its iterative convex approximation are presented, respectively. In Section VI, the evaluation of the proposed algorithm is provided. Finally, in Section VII, we draw some conclusions.
In this paper, we present an iterative, relaxed binaural LCMV beamforming method. Similar to the other binaural LCMV-based approaches, the proposed method strictly preserves the binaural cues of the target source. However, the proposed method is flexible to control the accuracy of binaural cue preservation of the interferers and, therefore, trade-off against additional noise reduction. This is achieved by using inequality constraints instead of the commonly used equality constraints. The task of each inequality constraint is the (approximate) preservation of the binaural cues of a single interferer in a controlled way. The proposed method is flexible to select a different value for the trade-off parameter of each interferer according to importance. The BMVDR and the JBLCMV can be seen as two extreme cases of the proposed method. On one hand, the BMVDR can achieve the best possible overall noise suppression compared to all the other aforementioned binaural LCMV-based methods, but causes full collapse of the binaural cues of the interferers towards the binaural cues of the target source. On the other hand, the JBLCMV can achieve the preservation of the maximum possible number of interferers compared to the other aforementioned binaural LCMV-based methods, but at the expense of less noise suppression. Unlike the JBLCMV and the BMVDR, the proposed method, is flexible to control the amount of noise suppression and binaural cue preservation according to the needs of the user. The relaxations used in the proposed method allow the usage of a substantially larger number of constraints for the approximate preservation of more interferers compared to all the other binaural LCMVbased methods including JBLCMV.
## II. SIGNAL MODEL AND NOTATION
Assume for convenience that each of the two hearing aids consists of M/ 2 microphones, where M is an even number.
Therefore, the microphone array consists of M microphones in total. The multi-microphone noise reduction methods considered in this paper operate in the frequency domain on a frame-by-frame basis. Let l denote the frame index and k the frequency-bin index. Assume that there is only one target source and there are r interferers. The k -th frequency coefficient of the l -th frame of the j -th microphone noisy signal, y j ( k, l ) , j = 1 , · · · , M , is given by
<!-- formula-not-decoded -->
where
- s ( k, l ) denotes the target signal at the source location.
- a j ( k, l ) is the acoustic transfer function (ATF) of the target signal with respect to the j -th microphone.
- u i ( k, l ) , is the i -th interfering signal at the source location.
- b ij ( k, l ) is the ATF of the i -th interfering signal with respect to the j -th microphone.
- n ij ( k, l ) is the i -th received interfering signal at the j -th microphone.
- x j ( k, l ) is the received target signal at the j -th microphone.
- v j ( k, l ) is additive noise at the j -th microphone.
Here we use in the signal model the ATFs for notational convinience. However, note that the ATFs can be replaced with relative acoustic transfer functions (RATF)s which can often be identified easier than the ATFs [12], [20].
In the remainder of the paper, the frequency and frame indices are neglected to simplify the notation. Using vector notation, Eq. (1) can be written as
<!-- formula-not-decoded -->
where y ∈ C M × 1 , x ∈ C M × 1 , n i ∈ C M × 1 and v ∈ C M × 1 are the stacked vectors of the y j , x j , n ij , v j (for j = 1 , · · · , M ) components, respectively. Moreover, x = a s and n i = b i u i , where a ∈ C M × 1 and b i ∈ C M × 1 are the stacked vectors of the a j and b ij (for j = 1 , · · · , M ) components, respectively.
Assuming that all sources and the additive noise are mutually uncorrelated, the CPSD matrix P y = E [ yy H ] of y is given by where
<!-- formula-not-decoded -->
- P n i = E [ n i n H i ] = p u i b i b H i ∈ C M × M is the CPSD matrix of n i , with p u i = E [ | u i | 2 ] the PSD of u i .
- P x = E [ xx H ] = p s aa H ∈ C M × M is the CPSD matrix of x , with p s = E [ | s | 2 ] the power spectral density (PSD) of s .
- P v = E [ vv H ] ∈ C M × M is the CPSD matrix of v .
· P = r ∑ i =1 P n i + P v is the total CPSD matrix of all disturbances.
## III. BINAURAL BEAMFORMING
Binaural multi-microphone noise reduction methods aim at the simultaneous noise reduction and binaural cue preservation of the sources. In order to preserve the binaural cues, two different spatial filters ˆ w L ∈ C M × 1 and ˆ w R ∈ C M × 1 , are applied to the left and right hearing aid, respectively, where constraints can be used to guarantee that certain phase and magnitude relations between the left and right hearing aid outputs are preserved. Note that both spatial filters use all microphone recordings from both hearing aids.
Assume for convenience and without loss of generality that the reference microphone for the left and right hearing aid is indexed as j = 1 and j = M , respectively. In the sequel of the paper, for ease of notation, the reference terms of Eq. (1) use the subscripts L and R instead of j = 1 and j = M , respectively. The two enhanced output signals at the left and right hearing aids are then given by
<!-- formula-not-decoded -->
In Section III-A, objective measures for the preservation of binaural cues are presented. In Sections III-C-III-F, the binaural MVDR (BMVDR), the binaural LCMV (BLCMV), the optimal BLCMV (OBLCMV), and the JBLCMV are reviewed, respectively. All reviewed methods are special cases of the general binaural LCMV (GBLCMV) framework, presented in Section III-B. Finally, the basic properties of all reviewed methods are summarized in Section III-G.
## A. Binaural Cues
The extent to which the binaural cues of a specific source are preserved can be expressed using the input and output interaural tranfer function (ITF) [31]. Often the ITF is decomposed into its magnitude, describing the interaural level differences (ILDs) and its phase, describing the interaural phase differences (IPDs). The input and output ITFs of the i -th interferer are defined as [31]
<!-- formula-not-decoded -->
The input and output ILDs are defined as [31]
<!-- formula-not-decoded -->
The input and output IPDs are given by [31]
<!-- formula-not-decoded -->
Note that frequently, the IPDs are converted and measured as time delays [32], i.e., interaural time differences (ITDs). The IPDs and ILDs are the dominant cues for binaural localization for low and high frequencies, respectively [33]. Typically, the IPDs become more important for frequencies below 1 kHz, while ILDs become more important for frequencies above 3 kHz [33]. In [34] it was experimentally shown that for broadband signals, the IPDs are perceptually much more important
than the ILDs for localizing a source. More specifically, it was shown that the low frequency IPDs play the most important role perceptually for correct localization. Based on this observation several proposed multi-microphone noise reduction techniques [32], [35] leave the low frequency content of the noisy measurements unprocessed, and process only the higher frequency content. Unfortunately, if a large portion of the power of the noise is concentrated at low frequencies, the noise reduction capabilities are reduced significantly. Therefore, in this paper we aim at the simultaneous preservation of binaural cues of all sources and noise reduction at all frequencies.
A binaural spatial filter, w = [ w T L w T R ] T , exactly preserves the binaural cues of the i -th interferer if ITF in n i = ITF out n i [31]. Exact preservation of ITFs also implies preservation of ILDs and IPDs [31], i.e., ILD in n i = ILD out n i and IPD in n i = IPD out n i . Non-exact preservation of binaural cues implies that there is some positive ITF error given by
<!-- formula-not-decoded -->
Moreover, non-exact presevation of binaural cues implies that there is some ILD and/or IPD errors, given by
<!-- formula-not-decoded -->
where 0 ≤ T n i ≤ 1 [31]. Eqs. (5), (6), (7), (8) and (9) apply also for the target source x . As it will become obvious in the sequel, for all methods that will be discussed in this paper, the errors in Eqs. (8), (9) with respect to the target source are always zero.
As explained before, the IPD error is perceptually more important measure for binaural localization than the ILD error for broadband signals (such as speech signals contaminated by broad-band noise signals), because the IPDs are perceptually more important than the ILDs for this category of signals. Moreover, the IPD error is perceptually more informative at low frequencies, while the ILD error is perceptually more informative at high frequencies.
## B. General Binaural LCMV Framework
All binaural LCMV-based methods discussed in this section are based on a general binaural LCMV (GBLCMV) 1 framework which is the binaural version of the classical LCMV framework [7], [8]. The GBLCMV minimizes the sum of the left and right output noise powers under multiple linear equality constraints. That is,
<!-- formula-not-decoded -->
where ˆ w GBLCMV = [ ˆ w T GBLCMV ,L ˆ w T GBLCMV ,R ] T ∈ C 2 M × 1 , Λ ∈ C 2 M × d is assumed to be a full column rank matrix (i.e., rank ( Λ ) = d ), f ∈ C d × 1 , d is the number of linear equality constraints, and
<!-- formula-not-decoded -->
1 We used the word general in order to distinguish it from the BLCMV method [26], [27].
Similarly to the classical LCMV framework [7], [8], if d ≤ 2 M , and Λ is full column rank, the GBLCMV has a closedform solution given by
In GBLCMV, the total number of degrees of freedom devoted to noise reduction is DOFGBLCMV = 2 M -d . Note that in the special case where d = 2 M , there are no degrees of freedom left for controlled noise reduction, i.e., ˆ w GBLCMV cannot reduce the objective function of the GBLCMV problem in a controlled way. Finally, if d > 2 M , the feasible set { w : w H Λ = f H } is empty and the GBLCMV problem has no solution. In conclusion, the matrix Λ has to be 'tall' (i.e., d < 2 M ), to be able to simultaneously achieve controlled noise reduction and satisfy the constraints of the GBLCMV problem. The maximum number of constraints that the GBLCMV framework can handle, while achieving controlled noise reduction, is d max = 2 M -1 , i.e., there should be always left at least one degree of freedom for noise reduction. Generally, the more degrees of freedom (i.e., the larger DOFGBLCMV), the more controlled noise reduction can be achieved.
<!-- formula-not-decoded -->
The set of linear constraints of the GBLCMV framework in Eq. (10) can be devided into two parts,
<!-- formula-not-decoded -->
The first part consists of two distortionless constraints w H L a = a L and w H R a = a R which preserve the target source at the two reference microphones. This can be written compactly as
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
where
All binaural methods discussed in this section are special cases of the GBLCMV framework and they share the constraints in Eq. (14), while the constraints w H Λ 2 = f H 2 are different.
In the sequel of the paper we use the term m ( m max ) to indicate the number (maximum number) of interferers that a special case of the GBLCMV framework can preserve, while at the same time achieving controlled noise reduction. Recall that controlled noise reduction means that there is at least one degree of freedom left for noise reduction. Moreover, m max ≤ r which means that some methods may be unable to preserve all simultaneously present interferers of the acoustic scene, because there are not enough available degrees of freedom.
## C. BMVDR
The BMVDR beamformer [30] can be formulated using the combination of the following two beamformers
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
with closed-form solutions
<!-- formula-not-decoded -->
The BMVDR is the simplest special case of the GBLCMV framework in the sense that it has the minimum number of constraints ( d = 2 ) given by Eq. (14). Specifically, the two optimization problems in Eqs. (15) and (16) can be reformulated as the following joint optimization problem,
<!-- formula-not-decoded -->
where ˆ w BMVDR = [ ˆ w T BMVDR ,L ˆ w T BMVDR ,R ] T ∈ C 2 M × 1 . Since, the BMVDR algorithm has the minimum possible number of constraints, the total number of degrees of freedom which can be devoted to noise reduction is DOFBMVDR = 2 M -2 .
The BMVDR beamformer preserves the binaural cues of the target source, but distorts the binaural cues of all the interferers [30], i.e., m max = 0 . More specifically, after beamforming, the binaural cues of the interferers collapse on the binaural cues of the target source. It can be easily shown [30] that the binaural cues of the target source are preserved due to the satisfaction of the two distortionless constraints of the problems in Eqs. (15) and (16). That is,
<!-- formula-not-decoded -->
Therefore, the ITF error is E x , BMVDR = 0 . Furthermore, it can be easily shown that the binaural cues of the interferers collapse to the binaural cues of the target source [30]. More specifically, the ITF in n i is given by
<!-- formula-not-decoded -->
while ITF out n i is given by
<!-- formula-not-decoded -->
Thus, after beamforming, the interferers will have the same ITF as the target source and their ITF error is given by
## D. BLCMV
<!-- formula-not-decoded -->
Another special case of the GBLCMV framework is the binaural linearly constrained minimum variance (BLCMV) beamformer [26], [27] which, unlike the BMVDR, uses additional constraints for the preservation of the binaural cues of m interferers. The left and right spatial filters of the BLCMV are given by [26], [27]
<!-- formula-not-decoded -->
and
<!-- formula-not-decoded -->
where the constraints w H L a = a L and w H R a = a R are the two common distortionless constraints used in all special cases in the GBLCMV framework, while the constraints w H L b i = η L b iL and w H R b i = η R b iR , for i = 1 , . . . , m , aim at a) preserving the binaural cues and b) supressing the m interferers. The amount of supression is controlled via the interference rejection parameters η L and η R which are predefined ( 0 ≤ η L , η R < 1 ) real-valued scalars. Binaural cue preservation is achieved only if η = η L = η R [26], [28]. The two optimization problems in Eqs. (23) and (24) can be compactly formulated as a joint optimization problem. That is,
<!-- formula-not-decoded -->
where and
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
The available degrees of freedom for noise reduction are DOFBLCMV = 2 M -d = 2 M -2 m -2 . Since d max = 2 M -1 (see Section III-B), BLCMV can simultaneously achieve controlled noise suppression and binaural cue preservation of at most m max = M -2 interferers.
The ITF errors of the target source and of the m interferers that are included in the constraints are zero, i.e., E x , BLCMV = 0 and E n i , BLCMV = 0 , for i = 1 , · · · , m ≤ r . However, if some interferers are not included in the constraints, their ITF error will be non-zero, i.e., E n i , BLCMV > 0 , for i = m +1 , · · · , r .
## E. OBLCMV
The OBLCMV [28] can be seen as a special case of the BLCMV (and, hence, the GBLCMV) since it solves the same optimization problem. However, it preserves the binaural cues of only one interferer (e.g., the k -th interferer) using an optimal complex-valued interference rejection parameter ˆ η = ˆ η L = ˆ η R with respect to the binaural output SNR (defined in Sec. VI-B2). More specifically, OBLCMV solves the optimization problem in Eq. (25) where Λ and f T , are given by [28]
<!-- formula-not-decoded -->
where 1 ≤ k ≤ r . The available degrees of freedom for noise reduction are DOFOBLCMV = 2 M -4 .
The ITF errors of the target source and of the k -th interferer that are included in the constraints are zero, i.e., E x , OBLCMV = 0 and E n k , OBLCMV = 0 . However, the binaural cues of all the other r -1 interferers will be distorted, i.e., E n i , BLCMV > 0 , for i ∈ { 1 , · · · , r } - { k } .
## F. JBLCMV
Recall from Section III-A that preserving binaural cues of the i -th interferer implies that the following constraint has to be satisfied
<!-- formula-not-decoded -->
which can be reformulated as:
<!-- formula-not-decoded -->
Compared to (O)BLCMV this unified constraint reduces the number of constraints, used for binaural cue preservation, by a factor 2. As a result, for a given number of interferers, more degrees of freedom can be devoted to noise reduction. The JBLCMV [29], [30] uses this type of equality constraints for the preservation of the binaural cues of m interferers. More specifically, the JBLCMV problem is given by
<!-- formula-not-decoded -->
where
<!-- formula-not-decoded -->
and w JBLCMV = [ w T JBLCMV ,L w T JBLCMV ,R ] T . Moreover,
Similarly to all other special cases of the GBLCMV framework, w H Λ 1 = f H 1 is used for the exact binaural cue preservation of the target source, while w H Λ 2 = f H 2 is used for the preservation of the binaural cues of m interferers.
<!-- formula-not-decoded -->
The JBLCMV can simultaneously achieve controlled noise reduction and binaural cue preservation of up to m max = 2 M -3 interferers [29]. Moreover, the degrees of freedom devoted to noise reduction is DOFJBLCMV = 2 M -m -2 .
## G. Summary of GBLCMV methods
We summarize some of the properties of the methods discussed in Section III. Table I gives an overview of two important factors: a) the maximum number of interferers' binaural cues that can be preserved while achieving controlled noise reduction m max, and b) the degrees of freedom (DOF) available for noise reduction. The following conclusions can be drawn from this table:
- The BMVDR has the maximum DOF, which means that it can achieve the best possible noise reduction. It
## TABLE I
SUMMARY OF A) MAXIMUM NUMBER OF INTERFERERS' BINAURAL CUES THAT CAN BE PRESERVED WHILE ACHIEVING CONTROLLED NOISE REDUCTION ( m MAX ), AND B) NUMBER OF AVAILABLE DEGREES OF FREEDOM FOR NOISE REDUCTION (DOF). ALL METHODS ARE SPECIAL CASES OF THE GBLCMV FRAMEWORK. M IS THE TOTAL NUMBER OF MICROPHONES, AND m IS THE NUMBER OF THE CONSTRAINED INTERFERERS.
| Method | m max | DOF |
|-------------------|---------|---------------|
| BMVDR [30] | 0 | 2 M - 2 |
| BLCMV [27] | M - 2 | 2 M - 2 m - 2 |
| OBLCMV [28] | 1 | 2 M - 4 |
| JBLCMV [29], [30] | 2 M - 3 | 2 M - m - 2 |
preserves the binaural cues of the target source, but not the binaural cues of the interferers.
- Unlike (O)BLCMV which uses two constraints per interferer, JBLCMV uses only one constraint per interferer. Therefore, JBLCMV can preserve the binaural cues of more interferers, or equivalently, given the same number of interferers it has more available degrees of freedom devoted to noise reduction.
In this paper, if the number of simultaneously present interferers is r > m max , the extra interferers r -m max are not included in the constraints in the GBLCMV methods, in order to always have one degree of freedom left for controlled noise reduction.
## IV. PROPOSED NON-CONVEX PROBLEM
In this section, we present a general optimization problem of which BMVDR and JBLCMV are special cases. More specifically, we relax the constraints on the binaural cues of the interferers, while keeping the strict equality constraints on the target source (i.e., w H Λ 1 = f H 1 ). The relaxation allows to trade-off the amount of noise reduction and binaural cue preservation per interferer in a controlled way. The proposed optimization problem is defined as
<!-- formula-not-decoded -->
The inequality constraints bound the ITF error (see Eq. (8)), for the interferers i = 1 , · · · , m to be less than a positive tradeoff parameter e i , i = 1 , · · · , m . These inequality constraints will be transformed, in the sequel of this section (see Eqs. (34), (35)), in such a way that they can be viewed as relaxations of the strict equality constraints in Eq. (28) used in the JBLCMV method. Note that the proposed method is flexible to choose a different e i for every interferer according to its importance. For instance, maybe certain locations are more important to be preserved than others and, therefore, a smaller e i must be used. The trade-off parameter, e i , is selected as
<!-- formula-not-decoded -->
where 0 ≤ c i ≤ 1 controls the amount of binaural cue collapse towards the target source, and the amount of noise reduction of the i -th interferer. If c i = 1 , ∀ i is used in the optimization problem in Eq. (32), then ˆ w = ˆ w BMVDR which is seen as a worst case, with respect to binaural cue preservation, because there is total collapse of binaural cues of the interferers towards the binaural cues of the target source. If c i = 0 , ∀ i we have perfect preservation of binaural cues of the m interferers, and ˆ w = ˆ w JBLCMV. Without any loss of generality, for notational convenience, we assume that the binaural cues of all interferers are of equal importance and, therefore, c i = c, ∀ i . Moreover, we keep c fixed over all frequency bins. It is worth noting that other strategies for choosing c may exist, which might lead to a better tradeoff between maximum possible noise reduction and perceptual binaural cue preservation. As explained in Section III-A, low frequency content is perceptually more important for binaural cue preservation than high frequency content. Thus, smaller c values for low frequencies and larger c values for higher frequencies may give a better perceptual trade-off.
The problem in Eq. (32) is not a convex problem and it is hard to solve. In Section V we propose a method that approximately solves the non-convex problem in an iterative way by solving at each iteration a convex problem.
## V. PROPOSED ITERATIVE CONVEX PROBLEM
By doing some simple algebraic manipulations, the optimization problem in Eq. (32) can equivalently be written as
<!-- formula-not-decoded -->
Furthermore, the optimization problem in Eq. (34) can be rewritten as
<!-- formula-not-decoded -->
We approximately solve the non-convex problem in Eq. (35) in an iterative way using w H R of the previous iteration in f 2 ,i , i = 1 , · · · , m . The new iterative problem is convex at each iteration and is given by where Λ 2 ,i is the i -th column of Λ 2 in Eq. (30).
<!-- formula-not-decoded -->
where ˆ w ( k ) = [ ˆ w T L, ( k ) ˆ w T R, ( k ) ] T is the estimated binaural spatial filter of the k -th iteration, which is initialized as ˆ w (0) = ˆ w BMVDR.
Similarly to other existing minimum variance beamformers with inequality constraints [36], [37], the convex optimization problem in Eq. (36) can be equivalently written as a second order cone programming (SOCP) problem with equality and inequality constraints (see Appendix) and it can be solved efficiently with interior point methods [38].
<!-- formula-not-decoded -->
The ITF error of the i -th interferer at the k -th iteration is given by
∣ ∣ This iterative method is stopped when all the constraints of the original problem in Eq. (32) are satisfied. The stopping criterion that we use for the proposed iterative method is given by
<!-- formula-not-decoded -->
The termination of the proposed iterative method may need a large amount of iterations because of the fixed c in Eq. (36). The reason for this is explained in detail in Section V-A. To control the speed of termination we replace in Section V-B the fixed c in Eq. (36) with a decreasing parameter τ ( k ) (initialized with τ (0) = c ) which controls the speed of termination. In Section V-C we show under which conditions the proposed algorithm guarantees that it will find a feasible solution satisfying the stopping criterion in Eq. (38) in a finite number of iterations. An overview of the proposed method using the adaptive τ ( k ) is given in Algorithm 1.
where e i ( c ) is given in Eq. (33). Recall that f 2 = 0 (i.e., f 2 ,i = 0 , ∀ i ) is used in JBLCMV. Unlike JBLCMV, the proposed method uses f 2 ,i, ( k ) ≥ 0 , ∀ i and, therefore, the constraints dedicated for the preservation of binaural cues of the interferers are seen as relaxations of the strict equality constraints of the JBLCMV method. These relaxations enlarge the feasible set of the problem, allowing more constraints to be used compared to JBLCMV. The JBLCMV can be seen as a special case of the proposed method for c = 0 , f 2 ,i, (1) = 0 , i = 1 , · · · m . In this case, the relaxed constraints in the proposed method become identical to the strict constraints of the JBLCMV. Hence, the JBLCMV needs to run only one iteration of the problem in Eq. (36). If c = 0 , the proposed method follows the same strategy for handling r > m max simultaneously present interferers as in Section III-G. However, if c > 0 , then there is a typically large, difficult to predict m max 2 , due to the inequality constraints and, therefore, the proposed method uses m = r, ∀ r constraints for the preservation of the binaural cues of all simultaneously present interferers. Finally, if c = 1 , the proposed method does not iterate and stops immediately giving as output the initialization ˆ w (0) = ˆ w BMVDR.
## A. Speed of Termination
The proposed iterative method may have slow termination due to the fixed choice of c . In this section we explain the reason and in Section V-B we explain how to control the speed of termination.
2 The feasible set of the proposed method typically reduces by adding more inequality constraints. However it is difficult to predict after how many constraints, m , it becomes empty, i.e., what is the value of m max.
Let Φ ( k ) denote the convex feasible set in the k -th iteration of the iterative optimization problem in Eq. (36) given by
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
and Ψ( c ) the non-convex feasible set of the original nonconvex problem of Eqs. (32), (33) given by where ˆ w JBLCMV ∈ Ψ(0) , and Ψ(0) ⊆ Ψ( c ) , 0 ≤ c ≤ 1 and, therefore, ˆ w JBLCMV ∈ Ψ( c ) , 0 ≤ c ≤ 1 . In words, ˆ w JBLCMV is the feasible solution that belongs to Ψ(0) and gives the minimum output noise power.
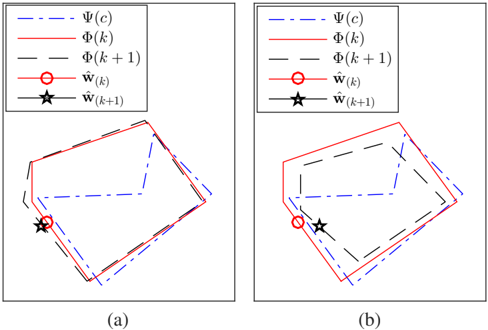
Note that the proposed iterative method will typically try to find a solution on the boundary of Φ ( k ) . Some parts of the boundary of Φ ( k ) will be inside or on the boundary of Ψ( c ) , while other parts can be outside the set Ψ( c ) . Therefore, it is possible that the estimated ˆ w ( k ) will be outside of Ψ( c ) (see Fig. 1(a) for instance). In this case, obviously, the stopping criterion is not satisfied and, therefore, the problem goes to the next iteration. In the next iteration, Φ ( k +1) changes and a new ˆ w ( k +1) is estimated which can be again outside of Ψ( c ) (see Fig. 1(a) for instance). This repetition can happen many times leading to a very slow termination because the new estimate ˆ w ( k +1) is not selected according to a binauralcue error descent direction. To avoid this undesirable situation, we propose in Section V-B to replace the fixed c in Eq. (36) with an adaptive reduction parameter τ ( k ) , in order to make sure that solutions that are on the boundary of Φ ( k ) and that are outside Ψ( c ) will progressively provide a reduced binauralcue error, i.e., to move towards the direction of the interior of Ψ( c ) (see Fig. 1(b) for instance).
Note that the Φ ( k ) changes for every next iteration, while Ψ( c ) is constant over time. We can think of Φ ( k ) as a convex approximation set of Ψ( c ) at iteration k (see a simplistic example of the two sets in Fig. 1(a)).
## B. Avoiding Slow Termination
The termination of the proposed iterative method may need a large amount of iterations because of the fixed c in Eq. (36), as explained in Section V-A. Therefore, the replacement of c with an adaptive reduction parameter τ ( k ) only in Eq. (36) is useful for guaranteed termination within a pre-selected finite maximum number of iterations, k max . More specifically, the new adaptive reduction parameter that we use in Eq. (36) instead of c is given by
<!-- formula-not-decoded -->
where τ (0) = c is selected according to the initial desired amount of collapse of binaural cues in the original non-convex problem in Eqs. (32), (33). The step α ( k max ) controls the speed of termination (i.e., how fast the stopping criterion will be satisfied), and is a function of the maximum allowed number of iterations for termination given from the user. That is,
<!-- formula-not-decoded -->
```
```
Note that we replace c with τ ( k ) only in Eq. (36) and not in the stopping criterion in Eq. (38). This is because, the stopping criterion is based on the fixed feasible set Ψ( c ) of the nonconvex problem in Eq. (32) which should remain constant over iterations (see an example of two consecutive iterations in Fig. 1). Moreover, the τ ( k ) is always non-negative, because τ ( k max ) = 0 . Small k max , speeds up the reduction of τ ( k ) and, thus, it also speeds up the termination of the proposed method. Of course a very small k max can lead to a feasible solution, ˆ w ( k ) , for which ∑ i E n i , ( k ) /lessmuch ∑ i e i ( c ) , i.e., to be far away from the boundary of Ψ( c ) . This means that ˆ w ( k ) provides better binaural cue preservation than the desired amount of binaural cue preservation, e i ( c ) . As a result, there will be less noise suppression. Ideally, we would like to arrive as close as possible to the controlled trade-off between noise reduction and binaural cue preservation given by our initial specifications (i.e., amount of collapse). Therefore, a careful choice of k max is needed in order to find a feasible solution ˆ w ( k ) that:
- to terminate as fast as possible.
- achieves a binaural-cue error ∑ i E n i , ( k ) ≈ ∑ i e i ( c ) , i.e., to be as close as possible to the boundary of Ψ( c ) .
Of course there is a trade-off between the two goals.
## C. Guaranteed Termination
In this section, we prove that the proposed iterative method using the adaptive reduction parameter in Eq. (41) guarantees termination, simultaneous controlled approximate binaural cue preservation, and controlled noise reduction, in at most k max iterations, for a limited number of interferers m ≤ 2 M -3 .
Fig. 1. Simplistic visualization of two successive iterations ( k and k +1 ) of the proposed method with (a) a fixed c , (b) a reducing τ ( k ) . In k +1 iteration the stopping criterion is satisfied in (b). On the contrary, in (a) the stopping criterion is not satisfied, because ˆ w ( k +1) / ∈ Ψ( c ) .
<details>
<summary>Image 1 Details</summary>
### Visual Description
## Diagram: 3D System Evolution with State Transitions
### Overview
The image contains two 3D diagrams (a) and (b) illustrating the evolution of a system with state transitions. Both diagrams use color-coded lines and markers to represent mathematical functions and states. The diagrams share a consistent legend but differ in the spatial arrangement of elements.
### Components/Axes
- **Axes**: Implicit 3D coordinate system (x, y, z) with no explicit labels.
- **Legend**: Located in the top-left corner of both diagrams.
- **Ψ(c)**: Blue dashed line (constant horizontal line at the top).
- **Φ(k)**: Red solid line (primary trajectory).
- **Φ(k+1)**: Black dashed line (shifted trajectory).
- **ẑ(k)**: Red circle with a line through it (initial state).
- **ẑ(k+1)**: Black star (final state).
### Detailed Analysis
#### Diagram (a)
- **Φ(k)**: Red solid line starts at the bottom-left, ascends to the top-right, then descends to the bottom-right, forming a peak.
- **Φ(k+1)**: Black dashed line mirrors Φ(k) but is shifted slightly upward and to the right.
- **Ψ(c)**: Blue dashed line remains a constant horizontal boundary at the top.
- **ẑ(k)**: Red circle with a line through it is positioned at the bottom-left corner.
- **ẑ(k+1)**: Black star is placed at the bottom-right corner.
#### Diagram (b)
- **Φ(k)**: Red solid line starts at the bottom-left, ascends to the top-right, then descends to the bottom-right, but with a steeper slope compared to (a).
- **Φ(k+1)**: Black dashed line follows a similar path to Φ(k) but is shifted further upward and to the right.
- **Ψ(c)**: Blue dashed line remains unchanged as a horizontal boundary.
- **ẑ(k)**: Red circle with a line through it is at the bottom-left, but closer to the red line.
- **ẑ(k+1)**: Black star is at the bottom-right, aligned with the black dashed line.
### Key Observations
1. **State Transitions**: The red circle (ẑ(k)) and black star (ẑ(k+1)) represent initial and final states, respectively. Their positions shift from (a) to (b), suggesting a progression.
2. **Function Evolution**: Φ(k) and Φ(k+1) show similar trajectories but with increased amplitude and shift in (b), indicating a dynamic system.
3. **Boundary Constraint**: Ψ(c) acts as a fixed upper limit for both diagrams.
4. **Spatial Relationships**: In (a), ẑ(k) and ẑ(k+1) are at opposite corners, while in (b), they align more closely with their respective Φ lines.
### Interpretation
The diagrams likely model a system where Φ(k) represents a function or state at iteration *k*, and Φ(k+1) its evolution at *k+1*. The shift between Φ(k) and Φ(k+1) suggests iterative refinement or adaptation. The constant Ψ(c) may represent a physical or theoretical boundary (e.g., energy limit, stability threshold). The markers ẑ(k) and ẑ(k+1) could denote critical points (e.g., equilibrium states) that transition spatially as the system evolves. Diagram (b) implies a more pronounced change or optimization compared to (a), possibly due to altered parameters or constraints.
</details>
Nevertheless, our simulation experiments (see Section VI-C) show that our algorithm a) is capable of simultaneously achieving controlled approximate binaural cue preservation and, in most cases, controlled noise reduction of more interferers than 2 M -3 for c > 0 , and b) finds a feasible solution in much fewer iterations, on average, than k max , for k max = 10 , 50 .
Theorem 1: If m ≤ 2 M -3 , the proposed method a) will always find a solution in a finite number of iterations k ≤ k max satisfying the stopping criterion of Eq. (38), and b) will always have a bounded ITF error, i.e.,
The adaptive decreasing of τ ( k ) (see Eq. (41)) results in an adaptive shrinking of Φ ( k ) . Therefore, in the case where the estimated ˆ w ( k ) will be outside of Ψ( c ) , the stopping criterion is not satisfied and, therefore, the algorithm continues with the next iteration. In the next iteration, Φ ( k ) typically shrinks due to the decreased value of τ ( k ) according to Eq. (41). The algorithm continues until there is a solution ˆ w ( k ) ∈ Ψ( c ) . Note that this does not necessarily mean that the algorithm will stop if and only if Φ ( k ) ⊆ Ψ( c ) (see e.g., Fig. 1(b) where the algorithm stops before Φ ( k ) ⊆ Ψ( c ) ). Only in the worst case scenario a solution is found when Φ ( k ) ⊆ Ψ( c ) . We show below that, for m ≤ 2 M -3 , the proposed method guarantees termination within a pre-defined finite maximum number of iterations, k max , while achieving controlled binaural cue preservation accuracy and controlled noise reduction. This is written more formally in the following theorem.
<!-- formula-not-decoded -->
and a bounded noise output power
<!-- formula-not-decoded -->
Proof: Note that for m ≤ 2 M -3 , after k max iterations τ ( k ) = 0 (see Eq. 41) and, therefore, ˆ w ( k max ) = ˆ w JBLCMV because the relaxations of the proposed method in Eq. (36) become w H ( k ) Λ 2 = 0 , which is the same as in JBLCMV as explained in Section V. Therefore, for m ≤ 2 M -3 , the algorithm, in the worst case scenario, will terminate after k max iterations (specified by the user), giving the solution ˆ w JBLCMV which always satisfies the stopping criterion, i.e., ˆ w JBLCMV ∈ Ψ( c ) , for 0 ≤ c ≤ 1 (see Section V-A). This means that the algorithm in the worst case scenario (after k max ) will have the noise output power ˆ w H JBLCMV ˜ P ˆ w JBLCMV and an ITF error equal 0 . Moreover, the noise output power cannot be less than ˆ w H BMVDR ˜ P ˆ w BMVDR (because ˆ w BMVDR achieves the best noise reduction over all the aforementioned methods, because it has the largest feasible set) and the ITF error will be E n i , ( k ) ≤ e i ( c ) ∀ i , because the stopping criterion is satisfied. Therefore, Eqs. (43) and (44) are proved.
Note that, for k = k max and m > 2 M -2 , Φ ( k max ) = ∅ 3 . However, for k < k max and m > 2 M -2 , Φ ( k ) may not be empty. As we will show in our experiments, indeed, usually it is not empty and, therefore, we may achieve simultaneous controlled approximate binaural cue preservation and, in most cases, controlled noise reduction of m > 2 M -2 interferers. This can be observed experimentally from our results in Sections VI-C2 and VI-C3.
## VI. EXPERIMENTAL RESULTS
In this section, the proposed algorithm is experimentally evaluated. In Section VI-A, the setup of our experiments is demonstrated. In Section VI-B, the performance measures are presented. In Section VI-C, the proposed method is compared to other LCMV-based methods with regard to binaural cue preservation and noise reduction. Moreover, we provide results with regard to the speed of the proposed method in terms of number of iterations.
## A. Experiment Setup
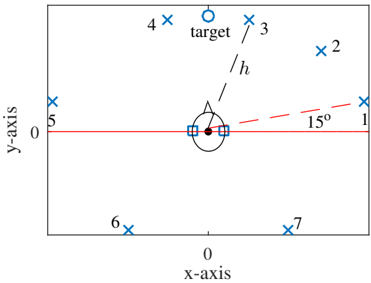
Fig. 2 shows the experimental setup that we used for our experiments. Two behind-the-ear (BTE) hearing aids, with two microphones each, are used for the experiments. Therefore, the total number of microphones is M = 4 . The publicly available database with the BTE impulse responses (IRs) in [39] is used to simulate the head IRs (we used the front and middle microphone for each hearing aid). The front microphones are selected as reference microphones.
We placed all sources on a h = 80 cm radius circle centered at the origin (0 , 0) (center of head) with an elavation of 0 o degrees. The index of each interferer (denoted by 'x' marker) is indicated in Fig. 2. The interferers 1 , 2 , 3 , 4 , 5 , 6 and 7 are speech shaped noise realizations with the same power and are placed at 15 o , 45 o , 75 o , 105 o , 165 o , 240 o and 300 o degrees, respectively. The target source (denoted by 'o' marker) is a speech signal in the look direction, i.e., 90 o degrees.
The duration of all sources is 60 sec. The microphone self noise at each microphone is simulated as white Gaussian noise (WGN) with P V = σ 2 I , where σ = 3 . 8 ∗ 10 -5 which corresponds to an SNR of 50 dB with respect to the target signal at the left reference microphone.
The noise CPSD matrices, P , are calculated (as in Eq. (3)) using the ATFs of the truncated true BTE IRs, from the
3 Recall that for m = 2 M -2 (i.e., d = 2 M ), there is a feasible solution which does not provide controlled noise reduction (see Section III-B).
Fig. 2. Experimental setup: /square hearing aids, 'o' target source, 'x' speech shaped interferers. Each source has the same distance, h , from the center of the head.
<details>
<summary>Image 2 Details</summary>
### Visual Description
## Diagram: Coordinate System with Target and Positioned Crosses
### Overview
The image depicts a 2D Cartesian coordinate system with labeled axes (x-axis and y-axis). A central "target" is marked at the origin (0,0) with a blue circle. Seven blue crosses (labeled 1–7) are positioned at specific coordinates along the x-axis. A dashed red line connects the target to cross 1, forming a 15° angle with the x-axis.
### Components/Axes
- **Axes**:
- **x-axis**: Labeled "x-axis" with numerical markers at -7, -6, -5, 0, 1, 2, 3, 4, 5, 6, 7.
- **y-axis**: Labeled "y-axis" with a single visible marker at 0.
- **Target**: Blue circle centered at (0,0), labeled "target."
- **Crosses**:
- **Cross 1**: Positioned at (1,0), connected to the target via a dashed red line.
- **Cross 2**: Positioned at (3,0).
- **Cross 3**: Positioned at (4,0).
- **Cross 4**: Positioned at (5,0).
- **Cross 5**: Positioned at (-5,0).
- **Cross 6**: Positioned at (-6,0).
- **Cross 7**: Positioned at (-7,0).
- **Angle**: Dashed red line from target to cross 1 forms a 15° angle with the x-axis.
### Detailed Analysis
- **Cross Positions**:
- Crosses 1–4 are on the positive x-axis at distances 1, 3, 4, and 5 units from the origin.
- Crosses 5–7 are on the negative x-axis at distances 5, 6, and 7 units from the origin.
- **Dashed Line**: The red dashed line from the target to cross 1 creates a 15° angle with the x-axis, suggesting a directional relationship between the target and cross 1.
- **Symmetry**: Crosses 1 and 5 are equidistant from the origin (1 and 5 units), but cross 1 is closer. Crosses 2 and 4 are asymmetrically placed (3 vs. 5 units).
### Key Observations
1. The target is centrally located at the origin, while crosses are distributed asymmetrically along the x-axis.
2. Cross 1 is the only cross connected to the target via a dashed line, emphasizing its significance.
3. The 15° angle between the dashed line and the x-axis may indicate a directional or angular relationship (e.g., orientation, trajectory).
4. Crosses 5–7 extend further along the negative x-axis than crosses 1–4 on the positive side.
### Interpretation
- The diagram likely represents a spatial analysis where the target (origin) is a reference point, and crosses denote positions of interest.
- The 15° angle suggests a specific directional focus (e.g., alignment, measurement) between the target and cross 1.
- The asymmetry in cross placement (e.g., cross 5 at -5 vs. cross 1 at +1) may imply uneven distribution or prioritization of certain positions.
- The absence of a y-axis scale beyond 0 suggests the focus is strictly on x-axis positioning, with no vertical displacement for the crosses.
## Additional Notes
- **Language**: All text is in English.
- **Missing Elements**: No legend, colorbar, or additional annotations beyond axis labels and cross identifiers.
- **Uncertainty**: Exact y-axis scaling is unclear (only 0 is labeled). The 15° angle is explicitly stated but lacks a reference for measurement precision.
</details>
database, and the estimated PSDs of the sources using all available data without voice activity detection (VAD) errors. Also, the constraints of all the aforementioned methods use the ATFs of the truncated true BTE IRs. The truncated BTE IRs length is 12 . 5 ms. The sampling frequency is f s = 16 kHz. We use a simple overlap-and-add analysis/synthesis method [40] with frame length 10 ms, overlap 50% and an FFT size of 256 . The analysis/synthesis window is a square-root-Hann window. The ATFs are also computed with an FFT size of 256 . Finally, the microphone signals are computed by convolving the truncated BTE IRs with the source signals at the original locations.
## B. Performance Evaluation
In this section we define the performance evaluation measures that we use to evaluate the results.
<!-- formula-not-decoded -->
1) ITFs, IPDs & ILDs: In this section three average performance measures for binaural cue preservation are defined: the average ILD error, the average IPD error, and the average ITF error. Note, as explained in Section III-A, that the IPD errors are perceptually important only for frequencies below 1 kHz, and the ILD errors are perceptually important only for frequencies above 3 kHz. Therefore, the evaluation of IPDs and ILDs will be done only for these frequency regions. We evaluate the average ILD and IPD error for all interferers as follows. Let L n i ( k, l ) and T n i ( k, l ) denote the ILD and IPD errors (for the k -th frequency bin and l -th frame), respectively, defined in Eq. (9). Then the average ILD and ITD errors are defined as and
where N and T are the number of frequency bins and the number of frames, respectively, k ILD and k IPD are the first and last frequency-bin indices in the frequency regions 3 -
<!-- formula-not-decoded -->
8 kHz and 0 -1 kHz, respectively.. Note that since the max possible value of T n i ( k, l ) is 1 , the max value of TotER IPD is r . Moreover, we evaluate the average ITF error given by where E n i is the ITF error defined in Eq. (8). Finally, we evaluate the average ITF error ratio given by
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
Please note that in these experiments we use the true ATFs in the constraints of the optimization problems of all competing methods. Therefore, we do not measure the corresponding error measures for the binaural cues of target source since they are always zero, because in all compared methods the constraints perfectly preserve the binaural cues of the target source.
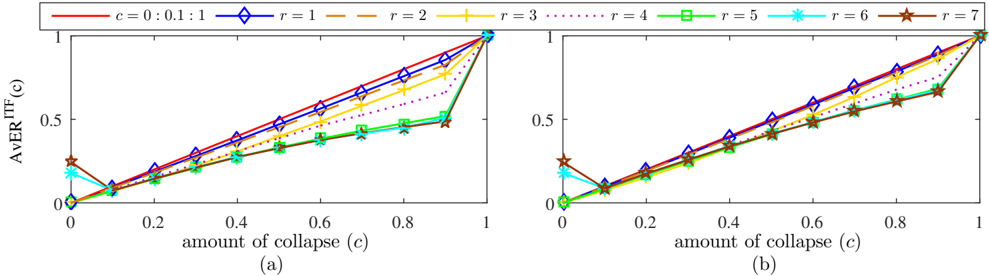
which measures the average amount of binaural cue collapse by comparing the ITF error of the proposed method with the ITF error of the BMVDR. Since the proposed method will always satisfy the condition E n i , ( k ) ( k, l ) ≤ c E n i , BMVDR ( k, l ) for r ≤ 2 M -3 (see Theorem 1 ), obviously AvER ITF ( c ) ≤ c for r ≤ 2 M -3 . Note that ideally the proposed method will provide a solution as close as possible to the boundary of Ψ( c ) , i.e., AvER ITF ( c ) ≈ c (see Section V-B). Moreover, for the proposed method AvER ITF (0) = 0 and AvER ITF (1) = 1 because for c = 0 , E n i ( k, l ) = 0 (for r ≤ 2 M -3 ), and for c = 1 , E n i ( k, l ) = E n i , BMVDR ( k, l ) .
2) SNR measures: We define the binaural global segmental signal-to-noise-ratio (gsSNR) gain as
<!-- formula-not-decoded -->
where the gsSNR input and output are defined as
<!-- formula-not-decoded -->
respectively, where for the l -th frame, the binaural input signalto-noise-ratio (SNR) is defined as
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
where e T = [ e T L e T R ] , e T L = [1 , 0 , · · · , 0] and e T R = [0 , · · · , 0 , 1] , ˜ P is defined in Eq. (11) and ˜ P x is similarly defined but it uses as diagonal block matrices the P x matrix. The binaural output SNR for the l -th frame, is defined as where w = [ w T L ( k, l ) w T R ( k, l )] T . Note that gsSNR out and gsSNR in can be seen as average measures of the binaural SNR measures defined in [30].
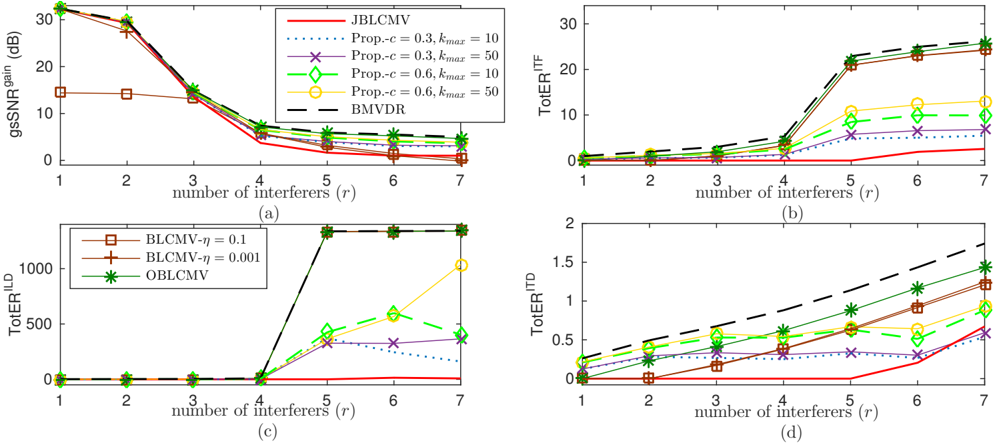
Fig. 3. Anechoic environment: Performance curves for the competing methods in terms of (a) noise reduction, (b) average ITF error, (c) average ILD error, (d) average IPD error.
<details>
<summary>Image 3 Details</summary>
### Visual Description
## Line Graphs: Performance Metrics vs. Number of Interferers
### Overview
The image contains four line graphs (a-d) analyzing the impact of increasing interferers (r = 1–7) on communication system performance. Key metrics include gSNR gain, ToIER_ILD, ToIER_ITF, and ToIER_ITD, with comparisons across different modulation/processing configurations (JBLCMV, Prop-c variants, BMVDR, BLCMV-η, OBLCMV).
---
### Components/Axes
#### Common Elements:
- **X-axis**: Number of interferers (r), integer values 1–7.
- **Y-axes**:
- (a): gSNR gain (dB)
- (b): ToIER_ITF (dB)
- (c): ToIER_ILD (dB)
- (d): ToIER_ITD (dB)
- **Legends**: Positioned on the right of each graph, with distinct line styles/markers for each configuration.
#### Graph-Specific Details:
- **(a) gSNR Gain**:
- **Lines**: Red (JBLCMV), dotted blue (Prop-c=0.3, k_max=10), purple (Prop-c=0.3, k_max=50), green diamonds (Prop-c=0.6, k_max=10), yellow circles (Prop-c=0.6, k_max=50), black dashed (BMVDR).
- **Markers**: Stars (JBLCMV), diamonds (Prop-c=0.6), circles (Prop-c=0.3), squares (BMVDR).
- **(b) ToIER_ITF**:
- Similar legend structure to (a), with markers for each configuration.
- **(c) ToIER_ILD**:
- **Lines**: Brown squares (BLCMV-η=0.1), brown crosses (BLCMV-η=0.001), green stars (OBLCMV).
- **(d) ToIER_ITD**:
- **Lines**: Black dashed (BMVDR), brown squares (BLCMV-η=0.1), brown crosses (BLCMV-η=0.001), green stars (OBLCMV).
---
### Detailed Analysis
#### (a) gSNR Gain
- **Trend**: All configurations show a **decreasing trend** as interferers increase. JBLCMV (red) starts highest (~30 dB at r=1) and drops sharply to ~5 dB at r=7. Prop-c=0.3 (blue/purple) and Prop-c=0.6 (green/yellow) follow similar declines but with slower rates. BMVDR (black dashed) remains relatively flat (~15 dB).
- **Key Data Points**:
- At r=1: JBLCMV ≈ 30 dB, BMVDR ≈ 15 dB.
- At r=7: JBLCMV ≈ 5 dB, BMVDR ≈ 12 dB.
#### (b) ToIER_ITF
- **Trend**: All configurations exhibit a **gradual increase** with more interferers. BMVDR (black dashed) rises steeply from ~0 dB (r=1) to ~25 dB (r=7). Prop-c=0.6 (green/yellow) shows moderate growth (~10–15 dB), while Prop-c=0.3 (blue/purple) remains lower (~5–10 dB).
- **Key Data Points**:
- At r=5: BMVDR ≈ 20 dB, Prop-c=0.6 ≈ 12 dB.
- At r=7: BMVDR ≈ 25 dB, Prop-c=0.3 ≈ 8 dB.
#### (c) ToIER_ILD
- **Trend**: BLCMV-η=0.1 (brown squares) spikes sharply at r=3 (~1000 dB) and plateaus. BLCMV-η=0.001 (brown crosses) remains near-zero. OBLCMV (green stars) shows minimal growth (~10–50 dB).
- **Key Data Points**:
- At r=3: BLCMV-η=0.1 ≈ 1000 dB, OBLCMV ≈ 10 dB.
- At r=7: BLCMV-η=0.1 ≈ 1000 dB, OBLCMV ≈ 50 dB.
#### (d) ToIER_ITD
- **Trend**: All configurations increase with interferers. BMVDR (black dashed) rises steeply (~0.5–1.5), while BLCMV-η=0.1 (brown squares) and OBLCMV (green stars) show moderate growth (~0.2–1.2).
- **Key Data Points**:
- At r=5: BMVDR ≈ 1.0, BLCMV-η=0.1 ≈ 0.8.
- At r=7: BMVDR ≈ 1.5, OBLCMV ≈ 1.2.
---
### Key Observations
1. **Interference Impact**: All metrics degrade with more interferers, except ToIER_ILD for BLCMV-η=0.001, which remains stable.
2. **Configuration Performance**:
- JBLCMV and Prop-c=0.3 outperform BMVDR in gSNR gain but underperform in ToIER metrics.
- BLCMV-η=0.1 causes extreme ToIER_ILD spikes, suggesting instability.
- OBLCMV maintains low ToIER_ILD/ITD but lags in gSNR gain.
3. **BMVDR Baseline**: Consistently higher ToIER values but stable gSNR gain.
---
### Interpretation
The data highlights trade-offs between interference resilience and performance metrics:
- **JBLCMV/Prop-c**: Optimized for gSNR gain but vulnerable to ToIER degradation.
- **BLCMV-η=0.1**: High gSNR gain but catastrophic ToIER_ILD spikes, indicating potential over-sensitivity to interference.
- **OBLCMV**: Balanced performance with minimal ToIER but lower gSNR gain.
- **BMVDR**: Acts as a reference, showing moderate gSNR gain and predictable ToIER growth.
The results suggest that system design must prioritize either interference mitigation (e.g., JBLCMV) or error resilience (e.g., OBLCMV), depending on operational requirements. The extreme ToIER_ILD for BLCMV-η=0.1 warrants further investigation into its practical feasibility.
</details>
## C. Results
In the following experiments we evaluate the performance of the proposed and reference methods (i.e., BLCMV [27] with two different values of η , OBLCMV [28], BMVDR [30] and JBLCMV [29], [30]) as a function of the number of simultaneously present interferers, 1 ≤ r ≤ 7 . For instance, for r = 1 , only the interferer with index 1 is enabled while all the others are silent. For r = 2 , only the interferers with indices 1 , 2 are enabled, while the others are silent, and so on. The binaural gsSNR in values for r = 1 , 2 , 3 , 4 , 5 , 6 and 7 are 0 . 46 , -1 . 45 , -2 . 29 , -2 . 92 , -3 . 76 , -4 . 15 , and -4 . 53 dB, respectively. Recall that each method has a different m max , except for the proposed method for c > 0 where m max is difficult to be estimated, as explained in Section V, and, therefore, m is always set to m = r . For each of the reference methods and the proposed method in the case of c = 0 and if r > m max , we will use in the constraints only the first m max interferers and the last r -m max will not be preserved. In Sections VI-C1, VI-C2 the simulations are carried out without taking into account room acoustics. In Section VI-C3 the simulations are carried out by taking into account room acoustics.
Figs. 3 and 4 show the comparison of the proposed method (denoted by Prop. -c = value , k max = value ) with the aforementioned reference methods in terms of binaural cue preservation and noise reduction. Note that BMVDR and the JBLCMV are the two extreme special cases of our method which can be denoted as Prop. -c = 1 and Prop. -c = 0 ,
1) SNR & Binaural Cue Preservation: For simplicity, we used the same c = c j , for j = 1 , · · · , m for all interferers in the proposed method. In other words, we assumed that the binaural cues of all interferers are equally important. Moreover, we selected for the adaptive change of τ ( k ) the step parameter α ( k max ) with k max ∈ { 10 , 50 } .
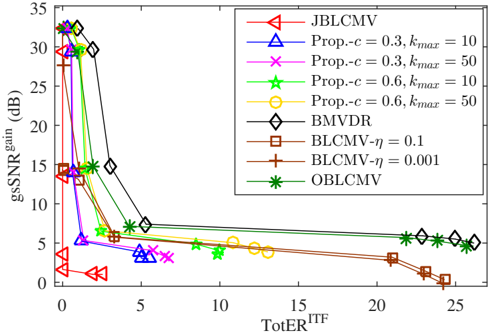
Fig. 4. Anechoic environment: Combination of performance curves from Fig. 3 for the competing methods in terms of (a) noise reduction, (b) average ITF error for different number of simultaneously present interferers r . The counting of r starts at the top left part of each curve.
<details>
<summary>Image 4 Details</summary>
### Visual Description
## Line Graph: gssSNR Gain vs. TotER_ITF
### Overview
The graph compares the gssSNR gain (in dB) across different configurations or methods as a function of TotER_ITF (x-axis). The y-axis ranges from 0 to 35 dB, while the x-axis spans 0 to 25. Multiple data series are plotted with distinct symbols and colors, each representing a unique configuration or algorithm.
### Components/Axes
- **Y-Axis**: Labeled "gssSNR gain (dB)" with a linear scale from 0 to 35.
- **X-Axis**: Labeled "TotER_ITF" with a linear scale from 0 to 25.
- **Legend**: Located in the top-right corner, mapping symbols/colors to configurations:
- **Red triangles**: JBLCMV
- **Blue triangles**: Prop.-c = 0.3, k_max = 10
- **Purple crosses**: Prop.-c = 0.3, k_max = 50
- **Green stars**: Prop.-c = 0.6, k_max = 10
- **Yellow circles**: Prop.-c = 0.6, k_max = 50
- **Black diamonds**: BMVDR
- **Brown squares**: BLCMV-η = 0.1
- **Brown crosses**: BLCMV-η = 0.001
- **Green asterisks**: OBLCMV
### Detailed Analysis
1. **JBLCMV (Red Triangles)**:
- Starts at ~30 dB at TotER_ITF = 0.
- Drops sharply to ~0 dB by TotER_ITF = 25.
- Steepest decline among all series.
2. **Prop.-c = 0.3 Configurations**:
- **k_max = 10 (Blue Triangles)**: Begins at ~28 dB, declines to ~5 dB by TotER_ITF = 25.
- **k_max = 50 (Purple Crosses)**: Starts at ~26 dB, drops to ~3 dB by TotER_ITF = 25.
- Higher k_max values result in slower SNR gain degradation.
3. **Prop.-c = 0.6 Configurations**:
- **k_max = 10 (Green Stars)**: Starts at ~24 dB, declines to ~4 dB by TotER_ITF = 25.
- **k_max = 50 (Yellow Circles)**: Begins at ~22 dB, drops to ~2 dB by TotER_ITF = 25.
- Higher k_max values again show slower degradation.
4. **BMVDR (Black Diamonds)**:
- Starts at ~25 dB, declines to ~5 dB by TotER_ITF = 25.
- Moderate decline rate, outperforming JBLCMV but underperforming Prop.-c = 0.6 configurations.
5. **BLCMV Configurations**:
- **η = 0.1 (Brown Squares)**: Starts at ~20 dB, declines to ~3 dB by TotER_ITF = 25.
- **η = 0.001 (Brown Crosses)**: Begins at ~18 dB, drops to ~2 dB by TotER_ITF = 25.
- Lower η values result in slightly better performance.
6. **OBLCMV (Green Asterisks)**:
- Starts at ~20 dB, declines to ~2 dB by TotER_ITF = 25.
- Gradual decline, maintaining higher SNR gain longer than most series.
### Key Observations
- **Steepest Decline**: JBLCMV (red triangles) loses SNR gain most rapidly.
- **Slowest Decline**: Prop.-c = 0.6, k_max = 50 (yellow circles) and OBLCMV (green asterisks) retain SNR gain longest.
- **η Sensitivity**: BLCMV-η = 0.001 (brown crosses) underperforms BLCMV-η = 0.1 (brown squares), suggesting η impacts robustness.
- **Consistency**: All configurations show monotonic decline, but rates vary significantly.
### Interpretation
The graph demonstrates that SNR gain degrades as TotER_ITF increases, with performance heavily dependent on configuration parameters:
- **Higher k_max values** (e.g., 50 vs. 10) improve resilience to TotER_ITF, as seen in Prop.-c and BLCMV series.
- **Lower η values** in BLCMV configurations enhance performance, indicating η is a critical tuning parameter.
- **OBLCMV** (green asterisks) exhibits the most gradual decline, suggesting it is optimized for environments with higher TotER_ITF.
- **JBLCMV** (red triangles) is the least robust, likely due to its design constraints.
This analysis highlights trade-offs between configuration parameters and system robustness, guiding optimization for specific operational conditions.
</details>
respectively. However, in these figures we used the original names for clarity. The performance curves are for different number of simultaneously present interferers r . As expected, the performance curves of the proposed method always lie between the BMVDR and the JBLCMV. Fig. 4 is the combination of the curves of Figs. 3(a,b) into a single figure. Notice that the number of interferers r in this combined figure increase from r = 1 up to r = 7 along the curves from top-left, to bottom-right. As expected, the proposed method for k max = 50 achieves slightly better noise reduction and worse binaural cue preservation than for k max = 10 . This is because for a larger k max , the proposed algorithm will provide a feasible solution closer to the boundary of Ψ( c ) , as explained
Fig. 5. Anechoic environment: Average ITF error ratio as a function of c for 1 ≤ r ≤ 7 for (a) k max = 10 and (b) k max = 50 . The solid line is the c values.
<details>
<summary>Image 5 Details</summary>
### Visual Description
## Line Graphs: AvER^ITF(c) vs. Amount of Collapse (c)
### Overview
Two line graphs (a) and (b) depict the relationship between the average error rate (AvER^ITF(c)) and the amount of collapse (c), ranging from 0 to 1. Both graphs share identical axes and legends but differ in line styles and markers for data series.
### Components/Axes
- **Y-axis**: Labeled "AvER^ITF(c)" with values from 0 to 1.
- **X-axis**: Labeled "amount of collapse (c)" with values from 0 to 1.
- **Legends**:
- **Graph (a)**:
- Red solid line with diamond markers: `c = 0 : 0.1 : 1`
- Blue diamond markers: `r = 1`
- Brown dashed line: `r = 2`
- Yellow cross markers: `r = 3`
- Purple dotted line: `r = 4`
- Green square markers: `r = 5`
- Cyan star markers: `r = 6`
- Brown star markers: `r = 7`
- **Graph (b)**:
- Same legend entries as (a), but line styles and markers vary slightly (e.g., `r = 4` uses a dotted line with stars instead of squares).
### Detailed Analysis
- **Graph (a)**:
- All lines start at (0, 0) and end at (1, 1), but slopes vary.
- `c = 0 : 0.1 : 1` (red solid line) is linear, while others curve upward.
- Higher `r` values (e.g., `r = 7`) show steeper slopes.
- Markers align with legend entries (e.g., diamonds for `r = 1`, stars for `r = 7`).
- **Graph (b)**:
- Similar trends to (a), but line styles differ (e.g., `r = 4` uses a dotted line with stars).
- `c = 0 : 0.1 : 1` remains linear, while other lines curve upward.
- Markers and colors match legend entries (e.g., green squares for `r = 5`).
### Key Observations
1. **Linear Baseline**: The `c = 0 : 0.1 : 1` line (red solid) acts as a reference, showing a constant rate of increase.
2. **Nonlinear Trends**: Lines for `r > 1` exhibit nonlinear growth, with steeper slopes for higher `r` values.
3. **Consistent Endpoints**: All lines terminate at (1, 1), suggesting a universal upper bound for AvER^ITF(c) at maximum collapse.
4. **Marker Consistency**: Each data series uses distinct markers (e.g., diamonds, stars) to differentiate parameters.
### Interpretation
- **System Behavior**: The graphs likely model how AvER^ITF(c) scales with collapse under varying conditions (e.g., `r` and `c` ratios). Higher `r` values may represent scenarios with greater sensitivity to collapse.
- **Reference Scenario**: The linear `c = 0 : 0.1 : 1` line provides a baseline for comparing nonlinear trends.
- **Design Intent**: Differentiated line styles and markers ensure clarity in distinguishing parameters, critical for technical analysis.
No textual content in other languages is present. All data points and trends are visually consistent with legend labels.
</details>
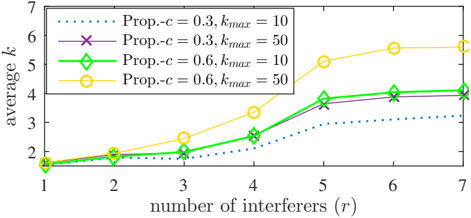
Fig. 6. Anechoic environment: Average number of iterations as a function of simultaneously present interferers, r .
<details>
<summary>Image 6 Details</summary>
### Visual Description
## Line Graph: Average k vs. Number of Interferers (r)
### Overview
The graph illustrates the relationship between the average value of a variable "k" and the number of interferers (r) under different parameter configurations. Four distinct data series are plotted, each representing unique combinations of "Prop.-c" (proportionality constant) and "k_max" (maximum k value). The y-axis (average k) ranges from 1 to 7, while the x-axis (number of interferers) spans 1 to 7.
### Components/Axes
- **X-axis**: Number of interferers (r), labeled with integer values 1–7.
- **Y-axis**: Average k, labeled with integer values 1–7.
- **Legend**:
- Dotted line (blue): Prop.-c = 0.3, k_max = 10
- Purple crosses: Prop.-c = 0.3, k_max = 50
- Green diamonds: Prop.-c = 0.6, k_max = 10
- Yellow circles: Prop.-c = 0.6, k_max = 50
- **Legend Position**: Top-left corner, outside the plot area.
### Detailed Analysis
1. **Dotted Line (Prop.-c = 0.3, k_max = 10)**:
- Starts at ~1.8 (r=1) and increases gradually to ~3.2 (r=7).
- Slope: Gentle upward trend.
- Data Points:
- r=1: ~1.8
- r=2: ~1.9
- r=3: ~2.1
- r=4: ~2.3
- r=5: ~2.5
- r=6: ~2.7
- r=7: ~3.2
2. **Purple Crosses (Prop.-c = 0.3, k_max = 50)**:
- Starts at ~1.9 (r=1) and rises to ~4.0 (r=7).
- Slope: Moderate upward trend.
- Data Points:
- r=1: ~1.9
- r=2: ~2.1
- r=3: ~2.4
- r=4: ~2.8
- r=5: ~3.3
- r=6: ~3.7
- r=7: ~4.0
3. **Green Diamonds (Prop.-c = 0.6, k_max = 10)**:
- Starts at ~1.8 (r=1) and increases to ~4.2 (r=7).
- Slope: Steeper than purple crosses.
- Data Points:
- r=1: ~1.8
- r=2: ~2.0
- r=3: ~2.3
- r=4: ~2.7
- r=5: ~3.2
- r=6: ~3.6
- r=7: ~4.2
4. **Yellow Circles (Prop.-c = 0.6, k_max = 50)**:
- Starts at ~1.8 (r=1) and rises sharply to ~6.5 (r=7).
- Slope: Steepest upward trend.
- Data Points:
- r=1: ~1.8
- r=2: ~2.2
- r=3: ~2.7
- r=4: ~3.5
- r=5: ~4.8
- r=6: ~5.5
- r=7: ~6.5
### Key Observations
- **Parameter Impact**: Higher values of both Prop.-c and k_max correlate with higher average k. For example:
- At r=7, yellow circles (Prop.-c=0.6, k_max=50) reach ~6.5, while dotted lines (Prop.-c=0.3, k_max=10) only reach ~3.2.
- **Slope Differences**: The yellow circles (highest parameters) exhibit the steepest slope, indicating a nonlinear relationship between r and k for larger parameter values.
- **Convergence**: All lines start at similar values (~1.8–1.9) for r=1, suggesting baseline behavior is independent of parameters.
### Interpretation
The graph demonstrates that:
1. **Parameter Sensitivity**: Both Prop.-c and k_max significantly influence the system's response to interferers. Higher values amplify the effect of increasing interferers on average k.
2. **Threshold Behavior**: For larger k_max (e.g., 50), the system exhibits a more pronounced response to interferers, suggesting a threshold effect where performance scales rapidly beyond a critical number of interferers.
3. **Nonlinearity**: The steepest slope for yellow circles (Prop.-c=0.6, k_max=50) implies diminishing returns or saturation at higher r values, as the curve flattens near r=7.
This analysis highlights the importance of parameter tuning in systems affected by interference, where optimal performance depends on balancing Prop.-c and k_max to manage trade-offs between responsiveness and stability.
</details>
in Section V-B.
Fig. 5 serves to visualize better the trade-off between fast termination and closeness to the boundary of Ψ( c ) (see Section V-B for details). More specifically, Fig. 5 shows the average ITF ratio of the proposed method, for k max = 10 , 50 , as a function of c for different number of simultaneously present interferers r . As expected (see Section VI-B1), AvER ITF ( c ) ≤ c for 1 ≤ r ≤ 5 . This is also the case for the curves for r = 6 , 7 except for c = 0 , as expected, because the proposed method becomes identical to the JBLCMV which can preserve the binaural cues of up to m max = 2 M -3 = 5 interferers while achieving controlled noise reduction. As expected, for k max = 50 all performance curves are closer to the boundary. In general, the larger the r , the less close the AvER ITF ( c ) of
From Figs. 3(a,b), and Fig. 4 it is clear that, indeed the proposed method achieves a controlled noise reduction and controlled approximate binaural cue preservation. The BMVDR achieves the best noise reduction performance, but it does not preserve the binaural cues of the interferers. The JBLCMV accurately preserves the highest number of simultaneously present interferers and it has worse noise reduction performance than all parametrizations of the proposed method. Note that m max = 5 for JBLCMV and, therefore, the last two interferers cannot be included in the constraints and that is why the binaural cue preservation is not perfect. The OBLCMV comes second in terms of SNR performance, but it preserves the binaural cues of only one interferer.
the proposed method is to c . In words, the more constraints we use in the proposed method, the harder it is to reach the boundary of Ψ( c ) . Note that for the two extreme values c = 0 and c = 1 , the proposed method becomes identical to the JBLCMV and the BMVDR, respectively. As was expected, for c = 0 and r ≤ 5 , AvER ITF (0) = 0 . The JBLCMV has m max = 2 M -3 = 5 and, therefore, for c = 0 and r = 6 , 7 , AvER ITF (0) > 0 . Finally, for c = 1 , for all values of r , AvER ITF (1) = 1 as expected.
2) Speed of Termination: In Fig. 6 we evaluate the number of iterations required for the proposed method to satisfy the stopping criterion (i.e., when it terminates). Fig. 6 shows the average number of iterations as a function of the simultaneously present interferers, r , of the four configurations of the proposed method that are tested in Fig. 3 and 4. It is clear that the proposed method terminates after 3-4 iterations on average, even for r = 6 , 7 > 2 M -3 . Note that for both tested values of k max , for all frames and frequency bins the proposed method terminated before reaching k max .
Fig. 7 shows a 3D histogram which depicts the statistical termination behaviour of the proposed method. Specifically, the proposed method is evaluated with different c values from 0 . 1 to 0 . 9 with a step-size 0 . 1 . For each c value it is evaluated for all numbers of simultaneously present interferers, i.e., for r = 1 , · · · , 7 as in Fig 6. Hence, this histogram represents all gathered pair-values ( c, k ) of all frequency bins for all r = 1 , · · · , 7 . The pairs ( c, k ) express the number of iterations (per frequency bin), k , that the proposed method need in order to terminate for a certain initial c . The z -axis, which is depicted with different colors, is the number of frequency bins that are associated with a certain pair ( c, k ) in the x-y axes. Again we see that, on average, after 3-4 iterations the algorithm terminates for c = 0 . 1 : 0 . 1 : 0 . 9 .
3) Reverberation: Figs. 8, 9 and 10 show the same experiments as in Figs. 4, 5, and 6, respectively, but this time in a reverberant office environment. The same signals for the interferers and the target are used here. The BTE IRs containing reverberation are also taken from the database in [39]. Note that, the aforementioned database does not have the reverberant (for the office environment) head IRs corresponding to 240 o and 300 o degrees [39]. Therefore, we
Fig. 7. Anechoic environment: Top view of 3D histogram of number of frequency bins that have pairs ( k, c ) for the proposed method for (a) k max = 10 and (b) k max = 50 .
<details>
<summary>Image 7 Details</summary>
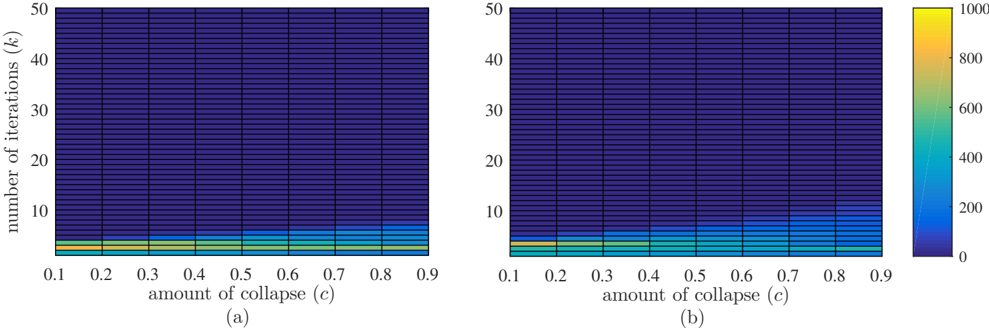
### Visual Description
## Heatmaps: Parameter Correlation Analysis
### Overview
Two heatmaps (a) and (b) visualize the relationship between "number of iterations (k)" (y-axis) and "amount of collapse (c)" (x-axis). Both use color gradients to represent numerical values, with distinct color scales and distributions.
---
### Components/Axes
- **X-axis**: "amount of collapse (c)" with discrete bins from 0.1 to 0.9 (increments of 0.1).
- **Y-axis**: "number of iterations (k)" with bins from 0 to 50 (increments of 10).
- **Legend**: Present only in (b), located on the right. Color scale ranges from **0 (dark blue)** to **1000 (yellow)**. No legend in (a), but inferred gradient from dark blue (low) to light blue (high).
---
### Detailed Analysis
#### Heatmap (a)
- **Color Gradient**: Dark blue (low values) to light blue (high values).
- **Distribution**:
- **Dark Blue Dominance**: Most cells are dark blue, indicating low values across most collapse/iteration combinations.
- **Light Blue Regions**: Concentrated in the lower-left quadrant (low collapse, low iterations), with slight extension toward higher collapse (~0.3–0.5) and iterations (~10–20).
- **Approximate Values**: Light blue regions likely correspond to **100–200** (inferred from (b)'s legend).
#### Heatmap (b)
- **Color Gradient**: Dark blue (low) to yellow (high), with explicit legend (0–1000).
- **Distribution**:
- **Dark Blue Dominance**: Upper regions (high collapse/iterations) are uniformly dark blue.
- **Yellow Regions**: Located in the lower-left quadrant (low collapse, low iterations), extending slightly toward higher collapse (~0.2–0.4) and iterations (~10–15).
- **Approximate Values**: Yellow regions correspond to **800–1000**.
---
### Key Observations
1. **General Trend**: Both heatmaps show a **negative correlation** between collapse/iterations and the parameter value (darker blue = lower values).
2. **Outliers in (b)**: Yellow regions in (b) indicate **high parameter values** despite low collapse and iterations, suggesting anomalous or sensitive conditions.
3. **Contrast Between (a) and (b)**:
- (a) has milder gradients (100–200 range), while (b) shows extreme values (up to 1000).
- (b)'s yellow regions are more spatially concentrated than (a)'s light blue areas.
---
### Interpretation
- **Parameter Behavior**: The parameter decreases as collapse and iterations increase, implying system stabilization or efficiency gains over time.
- **Anomalies in (b)**: The yellow regions in (b) suggest scenarios where the parameter remains high despite minimal system collapse, possibly due to:
- Initial conditions (e.g., pre-existing stress).
- Non-linear system responses.
- Measurement artifacts or outliers.
- **Practical Implications**:
- (a) may represent a controlled system with predictable behavior.
- (b) could model a real-world system with higher variability or sensitivity to initial states.
---
### Spatial Grounding & Verification
- **Legend Alignment**: In (b), yellow cells (high values) align with the legend's upper range (800–1000), confirming accuracy.
- **Trend Consistency**: Darker blue in upper regions of both heatmaps validates the negative correlation hypothesis.
---
### Uncertainties
- Exact value ranges for (a) are inferred due to the absence of a legend.
- The cause of anomalies in (b) requires further investigation (e.g., system modeling, data validation).
</details>
used the avalaible angles, 125 o , 145 o for the 6 -th and 7 -th interferer, respectively. Moreover, the sources are now placed on a h = 100 cm radius circle centered at the origin (0 , 0) (center of head) with an elavation of 0 o degrees (because only in this distance is available for the office environment in [39]). The binaural gsSNR in values for r = 1 , 2 , 3 , 4 , 5 , 6 and 7 are now -0 . 03 , -2 . 1 , -3 . 03 , -3 . 75 , -4 . 44 , -4 . 95 , and -5 . 42 dB, respectively.
As it is shown in Fig. 8, again the performance of the proposed method is bounded between the performance of the BMVDR and the JBLCMV, except for the case with parameters c = 0 . 3 and k max = 10 for r = 7 . The reason for that is that for r > 2 M -3 there are no guarantees for bounded performance (see Theorem 1). However, in all other cases of the proposed method for r > 2 M -3 the performance is bounded. In Fig. 9 it is clear that the proposed method has very similar behaviour as in Fig. 5, i.e., by increasing k max the the proposed method approaches closer to the boundary. Finally, in Fig. 10 it is shown that the speed of termination is not effected significantly due to reverberation.
## VII. CONCLUSION
In this paper we proposed a new multi-microphone iterative binaural noise reduction method. The proposed method is capable of controlling the amount of noise reduction and the accuracy of binaural cue preservation per interferer using a robust methodology. Specifically, the inequality constraints introduced for the binaural cue preservation of the interferers, are selected in such a way that a) the binaural-cue error is always less or equal than a fraction of the corresponding binaural-cue error of the BMVDR method, and b) the achieved amount of noise suppression is larger or equal to the one achieved via JBLCMV. Therefore, the proposed method provides the flexibility to the users to parametrize the proposed method according to their needs. Moreover, the proposed method always preserves strictly the binaural cues of the target source. Although the proposed method guarantees controlled approximate binaural cue preservation and controlled noise
Fig. 8. Reverberant environment (office): Combination of performance curves from Fig. 3 for the competing methods in terms of (a) noise reduction, (b) average ITF error for different number of simultaneously present interferers r . The counting of r starts at the top left part of each curve.
<details>
<summary>Image 8 Details</summary>
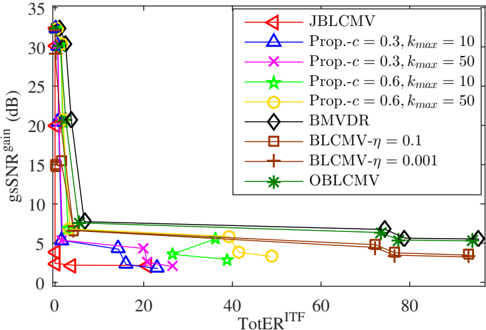
### Visual Description
## Line Graph: gSSNR Gain vs. TotER_ITF
### Overview
The graph compares the gSSNR gain (in dB) across multiple configurations as a function of TotER_ITF. It features seven distinct data series with varying trends, plotted using different symbols and colors. The y-axis ranges from 0 to 35 dB, while the x-axis spans 0 to 80 TotER_ITF.
### Components/Axes
- **X-axis**: Labeled "TotER_ITF" with ticks at 0, 20, 40, 60, and 80.
- **Y-axis**: Labeled "gSSNR_gain (dB)" with ticks at 0, 5, 10, 15, 20, 25, and 35.
- **Legend**: Positioned in the top-right corner, containing seven entries:
1. **JBLCMV** (red triangle)
2. **Prop.-c = 0.3, k_max = 10** (blue triangle)
3. **Prop.-c = 0.3, k_max = 50** (pink cross)
4. **Prop.-c = 0.6, k_max = 10** (green star)
5. **Prop.-c = 0.6, k_max = 50** (yellow circle)
6. **BMVDR** (black diamond)
7. **BLCMV-η = 0.1** (brown square)
8. **BLCMV-η = 0.001** (brown plus)
9. **OBLCMV** (green asterisk)
### Detailed Analysis
1. **JBLCMV** (red triangle): Starts at ~30 dB, drops sharply to ~5 dB by TotER_ITF = 20, then plateaus.
2. **Prop.-c = 0.3, k_max = 10** (blue triangle): Begins at ~25 dB, declines to ~5 dB by TotER_ITF = 20, then stabilizes.
3. **Prop.-c = 0.3, k_max = 50** (pink cross): Similar to blue triangle but with a slightly slower decline (~20 dB to ~5 dB).
4. **Prop.-c = 0.6, k_max = 10** (green star): Starts at ~25 dB, drops to ~5 dB by TotER_ITF = 20, then remains flat.
5. **Prop.-c = 0.6, k_max = 50** (yellow circle): Begins at ~20 dB, declines to ~5 dB by TotER_ITF = 20, then plateaus.
6. **BMVDR** (black diamond): Remains flat at ~5 dB across all TotER_ITF values.
7. **BLCMV-η = 0.1** (brown square) and **BLCMV-η = 0.001** (brown plus): Overlap almost perfectly, staying flat at ~5 dB.
8. **OBLCMV** (green asterisk): Flat at ~5 dB across the entire range.
### Key Observations
- Most configurations exhibit a sharp initial drop in gSSNR gain (from ~20–30 dB to ~5 dB) within the first 20 TotER_ITF units.
- BMVDR, BLCMV variants, and OBLCMV maintain a consistent ~5 dB gain regardless of TotER_ITF.
- Higher k_max values (e.g., 50 vs. 10) correlate with slightly slower declines in gain for Prop.-c configurations.
- The brown square (BLCMV-η = 0.1) and plus (BLCMV-η = 0.001) are visually indistinguishable, suggesting identical performance.
### Interpretation
The graph demonstrates that gSSNR gain is highly sensitive to configuration parameters (e.g., c, k_max, η). Configurations with lower c values (0.3 vs. 0.6) and higher k_max (50 vs. 10) show marginally better initial performance but similar long-term stability. BMVDR and BLCMV variants with fixed η values exhibit robustness, maintaining low but stable gains. The sharp initial drop in most series suggests a trade-off between early performance and long-term stability, while flat lines indicate configurations optimized for consistent, low-gain operation. The overlap between BLCMV-η = 0.1 and 0.001 implies η has minimal impact on performance in this range.
</details>
reduction only for m ≤ 2 M -3 interferers, it is experimentally demonstrated that is also capable of doing the same (in most cases) for more interferers and terminate in just a few iterations.
## APPENDIX
In this section, we show how the optimization problem in Eq. (36) can be equivalently written as a second order cone programming (SOCP) problem. For convenience, we reformulate the optimization problem in Eq. (36) using RATFs instead of ATFs. The left and right RATFs of the i -th interferer are ¯ b i,L = (1 /b iL ) b i and ¯ b i,R = (1 /b iR ) b i , respectively, while the left and right RATFs of the target are ¯ a L = (1 /a L ) a and ¯ a R = (1 /a R ) a , respectively. It is easy to show that the constraints of the optimization problem in Eq. (36) can be
Fig. 9. Reverberant environment (office): Average ITF error ratio as a function of c for 1 ≤ r ≤ 7 for (a) k max = 10 and (b) k max = 50 . The solid line is the c values.
<details>
<summary>Image 9 Details</summary>
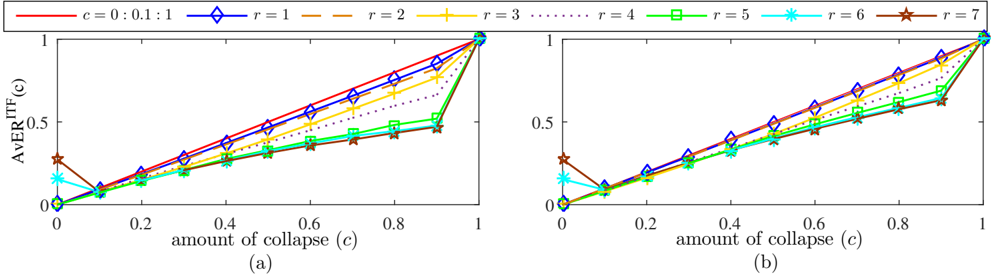
### Visual Description
## Line Graphs: AvERITF(c) vs. Amount of Collapse (c)
### Overview
The image contains two identical line graphs (a) and (b), plotting the relationship between the "amount of collapse (c)" (x-axis) and "AvERITF(c)" (y-axis). Both graphs use the same axes, legends, and data series, with no visible differences between (a) and (b).
### Components/Axes
- **X-axis**: "amount of collapse (c)" with values ranging from 0 to 1 in increments of 0.2.
- **Y-axis**: "AvERITF(c)" with values ranging from 0 to 1.
- **Legend**: Located at the top-left of both graphs. Contains:
- **Red solid line**: `c = 0 : 0.1 : 1` (linear progression from 0 to 1).
- **Blue diamond**: `r = 1`.
- **Brown dashed line**: `r = 2`.
- **Yellow plus**: `r = 3`.
- **Green dotted line**: `r = 4`.
- **Green square**: `r = 5`.
- **Cyan star**: `r = 6`.
- **Brown star**: `r = 7`.
### Detailed Analysis
- **Red line (`c = 0 : 0.1 : 1`)**:
- Starts at (0, 0) and ends at (1, 1), forming a straight diagonal line.
- Represents a linear relationship between `c` and `AvERITF(c)`.
- **Lines for `r = 1` to `r = 7`**:
- All lines start at (0, 0) and increase monotonically with `c`.
- **Trends**:
- `r = 1` (blue diamond): Reaches ~0.8 at `c = 1`.
- `r = 2` (brown dashed): Reaches ~0.7 at `c = 1`.
- `r = 3` (yellow plus): Reaches ~0.65 at `c = 1`.
- `r = 4` (green dotted): Reaches ~0.6 at `c = 1`.
- `r = 5` (green square): Reaches ~0.55 at `c = 1`.
- `r = 6` (cyan star): Reaches ~0.5 at `c = 1`.
- `r = 7` (brown star): Reaches ~0.45 at `c = 1`.
- **Uncertainty**: Values are approximate, with ±0.05 error margins inferred from visual spacing.
### Key Observations
1. **Consistent Trends**: All `r` values follow the same upward trend, but with diminishing returns as `r` increases.
2. **Red Line Dominance**: The red line (`c = 0 : 0.1 : 1`) consistently lies above all `r`-specific lines, suggesting it represents an upper bound or idealized scenario.
3. **Marker Consistency**: Legend colors/markers match line styles exactly (e.g., blue diamond = `r = 1`).
### Interpretation
- **Data Implications**:
- As `r` increases, the maximum `AvERITF(c)` at `c = 1` decreases, indicating that higher `r` values reduce performance under full collapse (`c = 1`).
- The red line (`c = 0 : 0.1 : 1`) may represent a theoretical maximum, where `c` is dynamically adjusted rather than fixed to a single `r` value.
- **Relationships**:
- `AvERITF(c)` scales linearly with `c` for all `r` values, but the slope decreases with higher `r`.
- The divergence between the red line and `r`-specific lines highlights the trade-off between collapse tolerance (`c`) and system resilience (`r`).
- **Anomalies**:
- No outliers observed; all lines follow smooth, predictable trends.
- The brown star (`r = 7`) lags significantly behind other `r` values, suggesting diminishing returns at extreme `r` values.
## Notes
- **Language**: All text is in English.
- **Spatial Grounding**:
- Legend is positioned at the top-left corner of both graphs.
- Data points and lines are evenly spaced along the x-axis.
- **TREND VERIFICATION**:
- All lines slope upward, confirming a positive correlation between `c` and `AvERITF(c)`.
- The red line’s slope is steeper than any `r`-specific line, validating its role as an upper bound.
</details>
Fig. 10. Reverberant environment (office): Average number of iterations as a function of simultaneously present interferers, r .
<details>
<summary>Image 10 Details</summary>
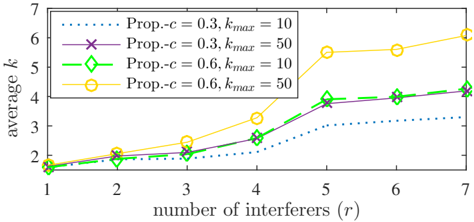
### Visual Description
## Line Graph: Average k vs. Number of Interferers (r)
### Overview
The image is a line graph comparing the relationship between the number of interferers (r) and the average value of k across four distinct scenarios defined by propagation coefficient (Prop.-c) and maximum k (k_max). The graph uses four distinct line styles and markers to differentiate the scenarios.
### Components/Axes
- **X-axis**: "number of interferers (r)" with integer values from 1 to 7.
- **Y-axis**: "average k" with a scale from 1 to 7.
- **Legend**: Located in the top-left corner, with four entries:
1. **Dotted blue line**: Prop.-c = 0.3, k_max = 10 (marked with "x").
2. **Purple dashed line**: Prop.-c = 0.3, k_max = 50 (marked with "x").
3. **Green dash-dot line**: Prop.-c = 0.6, k_max = 10 (marked with "□").
4. **Yellow solid line**: Prop.-c = 0.6, k_max = 50 (marked with "○").
### Detailed Analysis
1. **Dotted Blue Line (Prop.-c = 0.3, k_max = 10)**:
- Starts at (1, 1.8) and increases linearly to (7, 3.2).
- Slope: ~0.2 per unit increase in r.
2. **Purple Dashed Line (Prop.-c = 0.3, k_max = 50)**:
- Starts at (1, 1.9) and increases linearly to (7, 4.1).
- Slope: ~0.4 per unit increase in r.
3. **Green Dash-Dot Line (Prop.-c = 0.6, k_max = 10)**:
- Starts at (1, 1.7) and increases linearly to (7, 4.0).
- Slope: ~0.4 per unit increase in r.
4. **Yellow Solid Line (Prop.-c = 0.6, k_max = 50)**:
- Starts at (1, 1.6) and increases linearly to (7, 6.2).
- Slope: ~0.7 per unit increase in r.
### Key Observations
- **Trend**: All lines show a positive correlation between the number of interferers (r) and average k.
- **Impact of k_max**: Higher k_max values (50 vs. 10) result in significantly higher average k across all r values.
- **Impact of Prop.-c**: Higher Prop.-c (0.6 vs. 0.3) increases average k, especially at larger r values.
- **Steepest Growth**: The yellow line (Prop.-c = 0.6, k_max = 50) exhibits the steepest slope, indicating the strongest sensitivity to interferers.
### Interpretation
The graph demonstrates that both the propagation coefficient (Prop.-c) and the maximum k (k_max) are critical factors in determining the average k in the presence of interferers. Higher values of Prop.-c and k_max mitigate the negative effects of interferers, with k_max having a more pronounced impact. For example:
- At r = 7, the yellow line (Prop.-c = 0.6, k_max = 50) reaches an average k of ~6.2, while the dotted blue line (Prop.-c = 0.3, k_max = 10) only reaches ~3.2.
- The purple and green lines (same Prop.-c but differing k_max) show that increasing k_max from 10 to 50 improves performance by ~1.1 units at r = 7.
This suggests that optimizing k_max is more effective than adjusting Prop.-c for improving system performance under interference. The linear trends imply a predictable relationship between these variables, which could inform resource allocation or interference management strategies in network systems.
</details>
equivalently written as
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
where ζ = | ¯ a ∗ R, 1 ¯ b ∗ i,L,M -1 | (with ¯ a ∗ R, 1 the first element of ¯ a H R and ¯ b ∗ i,L,M is the last element of ¯ b i,L ) and Φ 2 ,i is the i -th column of the matrix Φ 2 given by
Similar to [36], [37], we convert the complex vectors and matrices to real-valued ones, i.e.,
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
<!-- formula-not-decoded -->
Note that w T ˜ ˘ Pw = || ˜ ˘ P 1 / 2 w || 2 2 , where ˜ ˘ P 1 / 2 is the principal square root of ˜ ˘ P . The convex optimization problem in Eq. (36) can be equivalently written as
<!-- formula-not-decoded -->
where ˘ q T 1 = [ 1 1 0 0 ] , ˘ Φ 2 ,i is the i -th column of ˘ Φ 2 , and ˇ Φ 2 ,i is the i -th column of ˇ Φ 2 . Note that the problem in Eq. (65) is a standard-form SOCP problem [38].
## ACKNOWLEDGMENT
The authors would like to thank Dr. Meng Guo for his helpful comments and suggestions.
## REFERENCES
- [1] R. C. Hendriks, T. Gerkmann, and J. Jensen, DFT-Domain Based SingleMicrophone Noise Reduction for Speech Enhancement: A Survey of the State of the Art . Morgan & Claypool, 2013.
- [3] K. Eneman et al., 'Evaluation of signal enhancement algorithms for hearing instruments,' in EURASIP Europ. Signal Process. Conf. (EUSIPCO) , Aug. 2008.
- [2] M. Brandstein and D. Ward (Eds.), Microphone arrays: signal processing techniques and applications . Springer, 2001.
- [4] S. Doclo and M. Moonen, 'GSVD-based optimal filtering for single and multimicrophone speech enhancement,' IEEE Trans. Signal Process. , vol. 50, no. 9, pp. 2230-2244, Sept. 2002.
- [5] A. Spriet, M. Moonen, and J. Wouters, 'Spatially pre-processed speech distortion weighted multi-channel Wiener filtering for noise reduction,' Signal Process. , vol. 84, no. 12, pp. 2367-2387, Dec. 2004.
- [7] B. D. Van Veen and K. M. Buckley, 'Beamforming: A versatile approach to spatial filtering,' IEEE ASSP Mag. , vol. 5, no. 5, pp. 4-24, Apr. 1988.
- [6] J. Capon, 'High-resolution frequency-wavenumber spectrum analysis,' Proc. IEEE , vol. 57, no. 8, pp. 1408-1418, Aug. 1969.
- [8] O. L. Frost III, 'An algorithm for linearly constrained adaptive array processing,' Proceedings of the IEEE , vol. 60, no. 8, pp. 926-935, Aug. 1972.
- [10] T. Van den Bogaert, T. J. Klasen, L. Van Deun, J. Wouters, and M. Moonen, 'Horizontal localization with bilateral hearing aids: without is better than with,' J. Acoust. Soc. Amer. , vol. 119, no. 1, pp. 515-526, Jan. 2006.
- [9] J. M. Kates, Digital hearing aids . Plural publishing, 2008.
- [11] A. W. Bronkhorst, 'The cocktail party phenomenon: A review of research on speech intelligibility in multiple-talker conditions,' Acta Acoustica , vol. 86, no. 1, pp. 117-128, 2000.
- [13] H. Schmidt, A. B. Baggeroer, W. A. Kuperman, and E. K. Scheer, 'Environmentally tolerant beamforming for high-resolution matched field processing: deterministic mismatch,' J. Acoust. Soc. Amer. , vol. 88, no. 4, Oct. 1990.
- [12] S. Markovich, S. Gannot, and I. Cohen, 'Multichannel eigenspace beamforming in a reverberant noisy environment with multiple interfering speech signals,' IEEE Trans. Audio, Speech, Language Process. , vol. 17, no. 6, pp. 1071-1086, Aug. 2009.
- [14] S. A. Vorobyov, 'Principles of minimum variance robust adaptive beamforming design,' ELSEVIER Signal Process. , vol. 93, no. 12, pp. 3264-3277, Dec. 2013.
- [16] S. Gazor and W. Zhang, 'Speech probability distribution,' IEEE Signal Process. Lett. , vol. 10, no. 7, pp. 204-207, Jul. 2003.
- [15] R. C. Hendriks, R. Heusdens, U. Kjems, and J. Jensen, 'On optimal multichannel mean-squared error estimators for speech enhancement,' IEEE Signal Process. Lett. , vol. 16, no. 10, pp. 885-888, Oct. 2009.
- [17] R. Martin, 'Speech enhancement based on minimum mean-square error estimation and supergaussian priors,' IEEE Trans. Speech Audio Process. , vol. 13, no. 5, pp. 845-856, Sep. 2005.
- [19] P. Vary and R. Martin, Digital speech transmission: Enhancement, coding and error concealment . John Wiley & Sons, 2006.
- [18] J. S. Erkelens, R. C. Hendriks, R. Heusdens, and J. Jensen, 'Minimum mean-square error estimation of discrete Fourier coefficients with generalized gamma priors,' IEEE Trans. Audio, Speech, Language Process. , vol. 15, no. 6, pp. 1741-1752, Aug. 2007.
- [20] S. Doclo, W. Kellermann, S. Makino, and S. Nordholm, 'Multichannel signal enhancement algorithms for assisted listening devices,' IEEE Signal Process. Mag. , vol. 32, no. 2, pp. 18-30, Mar. 2015.
- [22] T. Klasen, T. Van den Bogaert, M. Moonen, and J. Wouters, 'Binaural noise reduction algorithms for hearing aids that preserve interaural time delay cues,' IEEE Trans. Signal Process. , vol. 55, no. 4, pp. 1579-1585, Apr. 2007.
- [21] T. J. Klasen, T. Van den Bogaert, M. Moonen, and J. Wouters, 'Preservation of interaural time delay for binaural hearing aids through multichannel Wiener filtering based noise reduction,' in IEEE Int. Conf. Acoust., Speech, Signal Process. (ICASSP) , Mar. 2005, pp. 29-32.
- [23] S. Doclo, T. J. Klasen, T. Van den Bogaert, J. Wouters, and M. Moonen, 'Theoretical analysis of binaural cue preservation using multi-channel Wiener filtering and interaural transfer functions,' in Int. Workshop Acoustic Echo, Noise Control (IWAENC) , Sep. 2006.
- [25] D. Marquardt, E. Hadad, S. Gannot, and S. Doclo, 'Theoretical analysis of linearly constrained multi-channel Wiener filtering algorithms for combined noise reduction and binaural cue preservation in binaural hearing aids,' IEEE Trans. Audio, Speech, Language Process. , vol. 23, no. 12, Sept. 2015.
- [24] T. Van den Bogaert, S. Doclo, J. Wouters, and M. Moonen, 'The effect of multimicrophone noise reduction systems on sound source localization by users of binaural hearing aids,' J. Acoust. Soc. Amer. , vol. 124, no. 1, pp. 484-497, July 2008.
- [26] E. Hadad, S. Gannot, and S. Doclo, 'Binaural linearly constrained minimum variance beamformer for hearing aid applications,' in Int. Workshop Acoustic Signal Enhancement (IWAENC) , Sep. 2012, pp. 1-4.
- [28] D. Marquardt, E. Hadad, S. Gannot, and S. Doclo, 'Optimal binaural lcmv beamformers for combined noise reduction and binaural cue preservation,' in Int. Workshop Acoustic Signal Enhancement (IWAENC) , Sep. 2014, pp. 288-292.
- [27] E. Hadad, S. Doclo, and S. Gannot, 'The binaural LCMV beamformer and its performance analysis,' IEEE Trans. Audio, Speech, Language Process. , vol. 24, no. 3, pp. 543-558, Mar. 2016.
- [29] A. I. Koutrouvelis, R. C. Hendriks, J. Jensen, and R. Heusdens, 'Improved multi-microphone noise reduction preserving binaural cues,' in IEEE Int. Conf. Acoust., Speech, Signal Process. (ICASSP) , Mar. 2016.
- [31] B. Cornelis, S. Doclo, T. Van den Bogaert, M. Moonen, and J. Wouters, 'Theoretical analysis of binaural multimicrophone noise reduction techniques,' IEEE Trans. Audio, Speech, Language Process. , vol. 18, no. 2, pp. 342-355, Feb. 2010.
- [30] E. Hadad, D. Marquardt, S. Doclo, and S. Gannot, 'Theoretical analysis of binaural transfer function MVDR beamformers with interference cue preservation constraints,' IEEE Trans. Audio, Speech, Language Process. , vol. 23, no. 12, pp. 2449-2464, Dec. 2015.
- [32] J. G. Desloge, W. M. Rabinowitz, and P. M. Zurek, 'Microphone-array hearing aids with binaural output .I. Fixed-processing systems,' IEEE Trans. Speech Audio Process. , vol. 5, no. 6, pp. 529-542, Nov. 1997.
- [34] F. L. Wightman and D. J. Kistler, 'The dominant role of low-frequency interaural time differences in sound localization,' J. Acoust. Soc. Amer. , vol. 91, no. 3, pp. 1648-1661, Mar. 1992.
- [33] W. M. Hartmann, 'How we localize sound,' Physics Today , vol. 52, no. 11, pp. 24-29, Nov. 1999.
- [35] D. P. Welker, J. E. Greenberg, J. G. Desloge, and P. M. Zurek, 'Microphone-array hearing aids with binaural output .II. A twomicrophone adaptive system,' IEEE Trans. Speech Audio Process. , vol. 5, no. 6, pp. 543-551, Nov. 1997.
- [37] R. G. Lorenz and S. P. Boyd, 'Robust minimum variance beamforming,' IEEE Trans. Signal Process. , vol. 53, no. 5, pp. 1684-1696, May 2005.
- [36] S. A. Vorobyov, A. B. Gershman, and Z. Q. Luo, 'Robust adaptive beamforming using worst-case performance optimization: A solution to the signal mismatch problem,' IEEE Trans. Signal Process. , vol. 51, no. 2, pp. 313-323, Feb. 2003.
- [38] S. Boyd and L. Vandenberghe, Convex Optimization . Cambridge University Press, 2004.
- [40] J. Allen, 'Short-term spectral analysis, and modification by discrete Fourier transform,' IEEE Trans. Acoust., Speech, Signal Process. , vol. 25, no. 3, pp. 235-238, June 1977.
- [39] H. Kayser, S. Ewert, J. Annemuller, T. Rohdenburg, V. Hohmann, and B. Kollmeier, 'Database of multichannel in-ear and behind-the-ear headrelated and binaural room impulse responses,' EURASIP J. Advances Signal Process. , vol. 2009, pp. 1-10, Dec. 2009.