## Human in the Loop: Interactive Passive Automata Learning via Evidence-Driven State-Merging Algorithms
Christian A. Hammerschmidt 1 Radu State 1 Sicco Verwer 2
## Abstract
We present an interactive version of an evidencedriven state-merging (EDSM) algorithm for learning variants of finite state automata. Learning these automata often amounts to recovering or reverse engineering the model generating the data despite noisy, incomplete, or imperfectly sampled data sources rather than optimizing a purely numeric target function.
Domain expertise and human knowledge about the target domain can guide this process, and typically is captured in parameter settings. Often, domain expertise is subconscious and not expressed explicitly. Directly interacting with the learning algorithm makes it easier to utilize this knowledge effectively.
## 1. Introduction
Automata, and finite state machines in particular, have long been a formal model used in computer science to designing software and analyzing computer systems themselves (Lee & Yannakakis, 1996). Our knowledge about automata models comes from different source: Firstly, we have studied formal systems in detail and understand them as algebraic systems we can pose decision problems about. Secondly, we have experience lots experience applying them as a model language.
In learning, these tasks are done inversely to recover, reverse-engineer, or understand an unknown data source, typically a communication protocol or software controller. The automata models themselves are also seen as suitable to gain epistemic insight into the system of interest (Hammerschmidt et al., 2016; Vaandrager, 2017) for humans beyond learning models that minimize a given error function, or are used in model checkers for formal analysis.
1 University of Luxembourg 2 Delft Technical University. Correspondence to: Christian A. Hammerschmidt < christian.hammerschmidt@uni.lu > .
Presented at the Human in the Loop workshop at the 34 th International Conference on Machine Learning , Sydney, Australia, 2017. Copyright 2017 by the author(s).
And while we understand the theory of learning automata fairly well, e.g. via learnability results and convergence guarantees, there is a disconnect between the theory of learning algorithms on one side, and domain experts using automata as a modeling language on the other side. How can we bring the two sides together? We propose an interactive version of a learning algorithm with immediate graphical output at each step. This process brings reverse engineering closer to an iterative design process while guiding the process using state-of-the-art heuristics and algorithms. In Section 2, we briefly introduce finite state machines as automata models and outline learning approaches. In 3, we outline our algorithm and provide a small example outlining how our modification is useful. We conclude in Section 4 with an outlook and future work.
## 2. Preliminaries
## 2.1. Automata Models and Finite Automata
The models we consider are variants of deterministic finite state automata, or finite state machines. We provide a conceptual introduction here, and refer to literature for a thorough introduction (Hopcroft et al., 2013). An automaton consists of a set of states, connected by transitions labeled over an alphabet. There is a special start-state where all computations begin, and and a set of final states where computation ends. It is said to accept a word (string) over the alphabet in a computation if there exists a path of transitions from a predefined start state to one of the predefined final states, using transitions labeled with the letters of the word. Automata are called deterministic when there exists exactly one such path for every possible string. Probabilistic automata include probability values on transitions and compute word probabilities using the product of these values along a path, similar to hidden Markov models, rather than having final states. A Mealy machine is a deterministic finite automata that produces an output at each step.
## 2.2. Learning Approaches
Learning automata models, and in particular finite state machines, has long been of interest in the field of grammar induction. While the problem can be solved exactly
(see (Heule & Verwer, 2012)), it is NP-complete. There are two main classes of learning approaches: active learning and passive learning approaches.
In an active setting, the active learner is given the opportunity to interact with an oracle (or teacher) to ask questions about her current hypothesis of the model. Depending on the type of query and answers given by the oracle, different learnability results and algorithms can be obtained (Heinz & Sempere, 2016). The L ∗ algorithm is a successful active learner (Angluin, 1987).
In contrast, the learner in a passive setting has no oracle to interact with. Rather, he is given a fixed set of training data to learn from. In learning stochastic automata, methods based on the methods of moments as well as spectral learning algorithms have been studied (Balle et al., 2014). In Dupont et al. (2008), the authors combine active and passive approaches by asking a user membership queries during a state-merging process.
State-merging algorithms have been very successful in learning probabilistic as well as non-probabilistic automata, and trace back to Oncina & Garcia (1992). Recent state-of-the-art algorithms base on insights from Lang (1998); Verwer et al. (2014). We explain the generic algorithm and our modification in the next section.
## 3. State-Merging and Interactive State-Merging
The starting point for state-merging algorithms is the construction of a tree-shaped automaton from a set of words, the input sample. This initial automaton is called augmented prefix tree acceptor (APTA). It contains all sequences from the input sample, with each sequence element as a directed labeled transition, and states are added to the beginning, end, and between each symbol of the sequence. Two samples share a path in the tree if they share a prefix. The state-merging algorithm reduces the size of the automaton iteratively by merging pairs of states in the model, and forcing the result to be deterministic. The choice of the pairs, and the evaluation of a merge is made heuristically: Each possible merge is evaluated and scored, and the highest scoring merge is executed. This process is repeated and stops if no merges with high scores are possible. These merges generalize the model beyond the samples from the training set: the starting prefix tree is already an acyclic finite automaton. It has a finite set of computations, accepting all words from the training set. Merges can make the resulting automaton cyclic. Automata with cycles accept an infinite set of words. State-merging algorithms generalize by identifying repetitive patterns in the input sample and creating appropriate cycles via merges. Intuitively, the heuristic tries to accomplish this generaliza- tion by identifying pairs of states that have similar future behaviors. In a probabilistic setting, this similarity might be measured by similarity of the empirical probability distributions over the outgoing transition labels. In grammar inference, heuristics rely on occurrence information and the identity of symbols, or use global model selection criteria to calculate merge scores. Finally, the state-merging process as well as the heuristic are controlled by a number of parameters. The general outline of the algorithm is the same as in Algorithm 1, although the user prompt needs to be replaced with execution of the highest scoring merge.
## 3.1. An Interactive Algorithm
Algorithm 1 shows the modified interactive algorithm: Instead of automatically executing the best merge, the graphical visualization of the current model is displayed and the list of possible merges is displayed. The user can choose which of the possible merges to execute by typing its number in the sorted list of possible merges, to backtrack by one step using UNDO , to restart using RESTART , or to automatically execute the next n best merges using LEAP n . Moreover, she can change some global parameter of the algorithm using SET param and see the impact on the proposed merges. Lastly, she can add additional consistency constraints or force merges using the INSERT and FORCE commands. The order of the proposed merges follows the machine learning heuristic. Choosing the first/top merge prosed will lead to the same solution as a single batch-run of the algorithm. The source code for our C++ implementation (as part of out flexfringe tool (Verwer & Hammerschmidt, 2017)) is available in our repository 1 .
In our implementation, the algorithm keeps a stack of executed merges and a list of currently possible merges to store the current state of the algorithm. Based on these data structures, the user has full control over the state-merging process. Additionally, we output the visualization for the last two steps for visual inspection.
## 3.2. Example Use Case
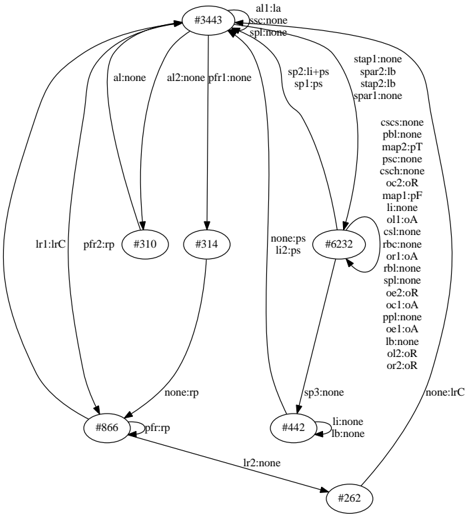
We illustrate the benefits of the interactive mode in a small example: The task is to recover the Mealy machine in Figure 1 from traces sampled from it. 2
Running an Mealy machine heuristic on 1000 sequences sampled from the model in batch mode yields a wrong
1 https://bitbucket.org/chrshmmmr/dfasat/ src/?at=development
2 For the batch version of our algorithm, this example is provided in an Jupyter notebook environment, see http:// automatonlearning.net/2016/11/04/a-passiveautomata-learning-tutorial-with-dfasat/
Figure 1. The original and fully recovered model of our example use case. State #3443 is the start state. The transitions are annotated with input:output symbols.
<details>
<summary>Image 1 Details</summary>
### Visual Description
\n
## Diagram: State Transition Diagram
### Overview
The image depicts a state transition diagram with several interconnected nodes representing states, and directed edges representing transitions between those states. Each transition is labeled with conditions or events that trigger the change. The nodes are numbered with hash symbols (#) followed by a numerical identifier. Each transition is labeled with a condition, formatted as "variable:value".
### Components/Axes
The diagram consists of the following nodes (states): #3443, #310, #314, #6232, #866, #442, #262.
The diagram consists of the following transitions (edges) with associated conditions:
* al1:la
* al2:none
* pfl:none
* sp1:ps
* sp2:li+ps
* stap1:none
* spar2:lb
* stap2:lb
* spar1:none
* lr1:C
* pfr2:rp
* none:ps
* li2:ps
* sp3:none
* none:rp
* lr2:none
* cscs:none
* pbl:none
* map1:pT
* psc:none
* csch:none
* oc2:oR
* li:none
* ol1:oA
* csl:none
* rbc:none
* or1:oA
* rbl:none
* spl:none
* oe2:oR
* oc1:oA
* ppln:none
* oe1:oA
* lb:none
* ol2:oR
* or2:oR
* none:lrC
* li:none
* lb:none
### Detailed Analysis / Content Details
The diagram can be described as follows:
1. **#3443** is the starting node. It has outgoing transitions to #310 (labeled "al1:la", "al2:none", "pfl:none"), and #6232 (labeled "sp1:ps", "sp2:li+ps").
2. **#310** has outgoing transitions to #314 (labeled "lr1:C", "pfr2:rp") and #866 (labeled "none:rp").
3. **#314** has outgoing transitions to #6232 (labeled "none:ps", "li2:ps").
4. **#6232** has outgoing transitions to #442 (labeled "sp3:none") and #262 (labeled "none:lrC").
5. **#866** has outgoing transitions to #310 (labeled "none:rp") and #262 (labeled "lr2:none").
6. **#442** has outgoing transitions to #262 (labeled "li:none", "lb:none").
7. **#262** is a terminal node.
The transitions from #6232 are further annotated with multiple conditions:
* cscs:none
* pbl:none
* map1:pT
* psc:none
* csch:none
* oc2:oR
* li:none
* ol1:oA
* csl:none
* rbc:none
* or1:oA
* rbl:none
* spl:none
* oe2:oR
* oc1:oA
* ppln:none
* oe1:oA
* lb:none
* ol2:oR
* or2:oR
### Key Observations
The diagram shows a complex flow with loops (e.g., #310 to itself via #866). Node #6232 appears to be a central hub, receiving transitions from multiple nodes and branching out to others. The conditions on the transitions are diverse, suggesting a system with many possible states and transitions. The multiple conditions associated with the transitions from #6232 suggest a complex decision-making process at that state.
### Interpretation
This diagram likely represents a finite state machine or a similar model of a system with discrete states and transitions. The conditions on the transitions represent the events or criteria that must be met for the system to move from one state to another. The diagram could be used to model a variety of systems, such as a communication protocol, a control system, or a software application. The complexity of the diagram suggests that the system being modeled is relatively complex. The presence of loops indicates that the system can revisit previous states. The detailed conditions on the transitions from #6232 suggest that this state is a critical decision point in the system. The diagram is a visual representation of the system's behavior, and can be used to analyze and understand its dynamics. The labels "lr", "sp", "pf", "al", "li", "lb", "oc", "ol", "or", "rb", "cs", "pp", "map", "psc", "csch" likely represent different variables or parameters within the system. The values "la", "none", "ps", "li+ps", "C", "rp", "oR", "oA", "pT" represent the possible values for those variables.
</details>
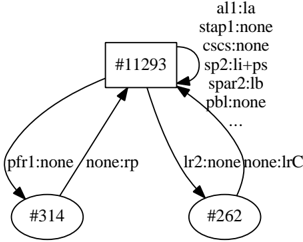
model, depicted in Figure 2 3 . Our state-merging algorithm outputs the following sequence of merges and extends:
m147 m182 m207 m10 m58 m79 m98 m47 m69 m62 m54 m57 m69 m71 m70 m83 m81 m97 m104 m117 m144 m158 m181 m221 m254 m305 m343 m413 m539 m119 x162 m264 m259 m0 m1036 m0 x61 m343 m42 m695 m780
There are two types of operations in the algorithm: merges and extensions. The letter m , e.g. m 147 , indicates operation executed was a merge (e.g. with score of 147 ). The letter x indicates and extension, e.g. x 169 indicates that a blue state occurring 169 times was inconsistent with all red states, and no merge could be executed. It therefore is color red. Better evidence, indicated by higher scores and higher occurrence counts, typically leads to better models. Two merges in the sequence above have an evidence of 0. This indicates that despite the lack of evidence for the inconsistency of the merge, there is also little evidence for the merge to be a good choice. Such merges can lead to over-generalization.
A common strategy to deal with this situation, which can occur e.g. due to the lack of sufficient training data or under-sampling specific paths in the model, is to adjust parameters of the statemerger or the heuristic by setting a lower bound on the required merge score and re-running the batch algorithm to resolve further issues 4 . But this is not the only possible parameter to adjust: Other strategies involve changing the relevancy threshold that ig-
3 To reproduce, run ./flexfringe -heuristic-name mealy -data-name mealy data -sinkson 1 -satdfabound 2000 data/original/traces1000.txt on the data in the repository.
4 To reproduce the model in batch mode, run ./flexfringe -
nore traces with low counts (which often can indicate the presence of noise in the collected data).
In our interactive version, a domain expert can immediately react when a merge with lower score is proposed (even without a visual inspection): She can choose to change the thresholds (commands SET state count or SET symbol count ), but they do not change the proposed merges. The expert can decide to exclude the merge by setting a lower bound ( SET lower bound 10), and possible use to restart and leap back to the position of the merge in question. The resulting model, after executing all following proposed merges is the correct model (as depicted in Figure 1) 5 .
In contrast, running the algorithm in batch mode would have required to re-run the complete algorithm multiple times, and comparing the sequence of merges done without the ability to draw up a list of alternative merges for each step.
Figure 2. State #11293 is the start state. The transitions are annotated with input:output symbols. The . . . indicate 30 more input-output pairs on the transition. The model overgeneralizes by merging states together despite low evidence of similarity.
<details>
<summary>Image 2 Details</summary>
### Visual Description
\n
## Diagram: State Transition Diagram
### Overview
The image depicts a state transition diagram with three nodes labeled #11293, #314, and #262. Arrows indicate transitions between these states, with labels describing the conditions or events triggering the transitions. The diagram appears to represent a system with a central state (#11293) and two dependent states (#314 and #262). There is a list of parameters associated with the central state.
### Components/Axes
The diagram consists of:
* **Nodes:** Representing states, labeled #11293, #314, and #262.
* **Arrows:** Representing transitions between states, labeled with conditions.
* **Parameter List:** A list of parameters associated with the central state #11293. The parameters are: all:la, stap1:none, cscs:none, sp2:li+ps, spar2:lb, pbl:none. There is also an ellipsis (...) indicating that the list is not exhaustive.
### Detailed Analysis or Content Details
* **Node #11293:** This is a rectangular node positioned near the center of the image. It has multiple incoming and outgoing arrows.
* **Node #314:** This is a circular node positioned towards the bottom-left of the image. An arrow originates from #11293 and points to #314, labeled "pfr1:none".
* **Node #262:** This is a circular node positioned towards the bottom-right of the image. An arrow originates from #11293 and points to #262, labeled "lr2:none". Another arrow originates from #262 and points to #11293, labeled "none:lrC".
* **Transition from #11293 to #314:** The transition is labeled "pfr1:none".
* **Transition from #11293 to #262:** The transition is labeled "lr2:none".
* **Transition from #262 to #11293:** The transition is labeled "none:lrC".
* **Transition from an unknown state to #11293:** There is a transition from an unknown state to #11293 labeled "none:rp".
* **Transitions to #11293:** There are multiple arrows pointing to #11293, labeled "all:la", "stap1:none", "cscs:none", "sp2:li+ps", "spar2:lb", "pbl:none".
### Key Observations
* The diagram shows a central state (#11293) that receives transitions from multiple sources and transitions to two other states (#314 and #262).
* State #262 has a feedback loop, transitioning back to #11293.
* The parameters associated with #11293 suggest configuration settings or conditions.
* The ellipsis (...) indicates that the list of parameters is incomplete.
### Interpretation
The diagram likely represents a control system or a state machine. The central state (#11293) could be a main processing loop or a decision point. The transitions represent different events or conditions that cause the system to move between states. The parameters associated with #11293 define the system's behavior in that state. The feedback loop from #262 to #11293 suggests a continuous monitoring or adjustment process. The labels "none" in several transitions suggest default or inactive conditions. The diagram is a simplified representation of a more complex system, as indicated by the ellipsis. The parameters are likely specific to the application domain of the system. Without further context, it is difficult to determine the exact purpose of the system or the meaning of the parameters.
</details>
## 4. Conclusion & Future Work
Our experience indicates that a hybrid mode between manual and fully automatic decision is most useful: Especially in cases of large training files (and therefore large initial models which are hard to use visually), automating all decisions until a specific criterion is met (e.g. the best proposed score is below a given threshold, or n merges are executed) takes some burden off the human domain expert while still allowing intervention when necessary. By following the suggestions of the heuristic, the expert can retain learnability guarantees from batch learning algorithms. We have not yet conducted a (formal) analysis to quantify the benefits of interactivity in terms of convergence speed. In Lambeau et al. (2008), the authors experimentally showcase the positive effect of mandatory merge constraints. Similar information, and thus benefits, are provided by the interaction proposed here. Domain expert can implicitly act as a teacher or oracle active learning, bringing together elements from both active and passive learning approaches to automata.
heuristic-name mealy -data-name mealy data -state count 15 symbol count 5 -sinkson 1 -satdfabound 2000 -lowerbound 50 data/original/traces1000.txt on the data in the repository.
5 To reproduce, run ./start.sh interactive-mealy.ini data/original/traces1000.txt from the repository, execute merges until the first m 0 , set lower bound 10 , restart , leap 35 , and execute all merges.
## Acknowledgements
I would like to thank my collages for the valuable discussions and the feedback.
/negationslash
```
```
## References
- Angluin, Dana. Learning regular sets from queries and counterexamples. Information and computation , 75(2):87-106, 1987.
- Balle, Borja, Carreras, Xavier, Luque, Franco M., and Quattoni, Ariadna. Spectral learning of weighted automata: A forwardbackward perspective. Machine Learning , 96(1-2):33-63, July 2014. ISSN 0885-6125, 1573-0565. doi: 10.1007/s10994-0135416-x.
- Dupont, Pierre, Lambeau, Bernard, Damas, Christophe, and Lamsweerde, Axel van. THE QSM ALGORITHM AND ITS
- APPLICATION TO SOFTWARE BEHAVIOR MODEL INDUCTION. Applied Artificial Intelligence , 22(1-2):77-115, February 2008. ISSN 0883-9514, 1087-6545. doi: 10.1080/ 08839510701853200.
- Hammerschmidt, Christian Albert, Lin, Qin, Verwer, Sicco, and State, Radu. Interpreting Finite Automata for Sequential Data. arXiv:1611.07100 [cs, stat] , November 2016. arXiv: 1611.07100.
- Heinz, Jeffrey and Sempere, Jos M. Topics in Grammatical Inference . Springer, 2016.
- Heule, Marijn J. H. and Verwer, Sicco. Software model synthesis using satisfiability solvers. Empirical Software Engineering , 18(4):825-856, August 2012. ISSN 1382-3256, 1573-7616. doi: 10.1007/s10664-012-9222-z.
- Hopcroft, John E., Motwani, Rajeev, and Ullman, Jeffrey D. Introduction to Automata Theory, Languages, and Computation . Pearson, Harlow, Essex, pearson new international edition edition, November 2013. ISBN 978-1-292-03905-3.
- Lambeau, Bernard, Damas, Christophe, and Dupont, Pierre. State-merging DFA induction algorithms with mandatory merge constraints. Grammatical Inference: Algorithms and Applications , pp. 139-153, 2008.
Lang, K. Evidence driven state merging with search. 1998.
- Lee, D. and Yannakakis, M. Principles and methods of testing finite state machines-a survey. Proceedings of the IEEE , 84(8): 1090-1123, August 1996. ISSN 0018-9219. doi: 10.1109/5. 533956.
- Oncina, Jose and Garcia, Pedro. Identifying Regular Languages In Polynomial Time. In Advances in ... , pp. 99-108. World Scientific, 1992.
- Vaandrager, Frits. Model Learning. Commun. ACM , 60(2):86-95, January 2017. ISSN 0001-0782. doi: 10.1145/2967606.
- Verwer, Sicco, Eyraud, Rmi, and De La Higuera, Colin. PAutomaC: a probabilistic automata and hidden Markov models learning competition. Machine learning , 96(1-2):129-154, 2014.
- Verwer, Sicco E. and Hammerschmidt, Christian A. flexfringe: A Passive Automaton Learning Package. September 2017.