1801.04819
Model: nemotron-free
## Chapter 45
## Robots as powerful allies for the study of embodied cognition from the bottom up
## Matej Hoffmann and Rolf Pfeifer
## Introduction
The study of human cognition- and human intelligence- has a long history and has kept scientists from various disciplines- philosophy, psychology, linguistics, neuroscience, artificial intelligence, and robotics- busy for many years. While there is no agreement on its definition, there is wide consensus that it is a highly complex subject matter that will require, depending on the particular position or stance, a multiplicity of methods for its investigation. Whereas, for example, psychology and neuroscience favor empirical studies on humans, artificial intelligence has proposed computational approaches, viewing cognition as information processing, as algorithms over representations. Over the last few decades, overwhelming evidence has been accumulated showing that the pure computational view is severely limited and that it must be extended to incorporate embodiment, i.e., the agent's somatic setup and its interaction with the real world, and, because they are real physical systems, robots became the tools of choice to study cognition. There have been a plethora of pertinent studies, but they all have their own intrinsic limitations. In this chapter, we demonstrate that a robotic approach, combined with information theory and a developmental perspective, promises insights into the nature of cognition that would be hard to obtain otherwise.
We start by introducing 'low- level' behaviors that function without control in the traditional sense; we then move to sensorimotor processes that incorporate reflex- based loops (involving neural processing). We discuss 'minimal cognition' and show how the role of embodiment can be quantified using information theory, and we introduce the
so- called SMCs, or sensorimotor contingencies, which can be viewed as the very basic building blocks of cognition. Finally, we expand on how humanoid robots can be productively exploited to make inroads in the study of human cognition.
## Behavior Through Interaction
What cognitive scientists are regularly forgetting is that complex coordinated behaviors- for example, walking, running over uneven terrain, swimming, avoiding obstacles- can often be realized with no or minimal involvement of cognition/ representation/ computation. This is possible because of the properties of the body and the interaction with the environment, that is, the embodied and embedded nature of the agent. Robotics is well suited for providing existence proofs of this kind and then to further analyze these phenomena. We will only briefly present some of the most notable case studies.
## Low- Level Behavior: Mechanical Feedback Loops
A classical illustration of behavior in complete absence of a 'brain' is the passive dynamic walker (McGeer 1990): a minimal robot that can walk without any sensors, motors, or control electronics. It loosely resembles a human, with two legs, no torso, and two arms attached to the 'hips, ' but its ability to walk is exclusively due to the downward slope of the incline on which it walks and the mechanical parameters of the walker (mainly leg segment lengths, mass distribution, foot shape, and frictional characteristics). The walking movement is entirely the result of finely tuned mechanics on the right kind of surface. A motivation for this research is also to show how human walking is possible with minimal energy use and only limited central control. However, most of the problems that animals or robots are faced with in the real world cannot be solved solely by passive interaction of the physical body with the environment. Typically, active involvement by means of muscles/ motors is required. Furthermore, the actuation pattern needs to be specified by the agent, 1 and hence a controller of some sort is required. Nevertheless, it turns out that if the physical interaction of the body with the environment is exploited, the control program can be very simple. For example, the passive dynamic walker can be modified by adding a couple of actuators and sensors and a reflex- based controller, resulting in the expansion of its niche to level ground while keeping the control effort and energy expenditure to a minimum (Collins et al. 2005).
However, in the real world, the ground is often not level and frequent corrective action needs to be taken. It turns out that often the very same mechanical system can
1 In this chapter, we will use 'agent' to describe humans, animals, or robots.
generate this corrective response. This phenomenon is known as self- stabilization and is a result of a mechanical feedback loop. To use dynamical systems terminology, certain trajectories (such as walking with a particular gait) have attracting properties and small perturbations are automatically corrected, without control- or one could say that 'control' is inherent in the mechanical system. 2 Blickhan et al. (2007) review self- stabilizing properties of biological muscles in a paper entitled 'Intelligence by Mechanics'; Koditschek et al. (2004) analyze walking insects and derive inspiration for the design of a hexapod robot with unprecedented mobility (RHex- e.g., Saranli et al. 2001).
## Sensorimotor Intelligence
Mechanical feedback loops constitute the most basic illustration of the contribution of embodiment and embeddedness to behavior. The immediate next level can be probably attributed to direct, reflex- like, sensorimotor loops. Again, robots can serve to study the mechanisms of 'reactive' intelligence. Grey Walter (Walter 1953), the pioneer of this approach, built electronic machines with a minimal 'brain' that displayed phototacticlike behavior. This was picked up by Valentino Braitenberg (Braitenberg 1986) who designed a whole series of two- wheeled vehicles of increasing complexity. Even the most primitive ones, in which sensors are directly connected to motors (exciting or inhibiting them), display sophisticated behaviors. Although the driving mechanisms are simple and entirely deterministic, the interaction with the real world, which brings in noise, gives rise to complex behavioral patterns that are hard to predict.
This line was picked up by Rodney Brooks, who added an explicit anti- representationalist perspective in response to the in- the- meantime- firmly- established cognitivistic paradigm (e.g., Fodor 1975; Pylyshyn 1984) and 'good old- fashioned artificial intelligence' (GOFAI) (Haugeland 1985). Brooks openly attacked the GOFAI position in the seminal articles 'Intelligence without Reason' (Brooks 1991a) and 'Intelligence without Representation' (Brooks 1991b), and proposed behavior- based robotics instead. Through building robots that interact with the real world, such as insect robots (Brooks 1989), he realized that 'when we examine very simple level intelligence we find that explicit representations and models of the world simply get in the way. It turns out to be better to use the world as its own model' (Brooks 1991b). Inspired by biological evolution, Brooks created a decentralized control architecture consisting of different layers; every layer is a more or less simple coupling of sensors to motors. The levels operate in parallel but are built in a hierarchy (hence the term subsumption architecture ; Brooks 1986). The individual modules in the architecture may have internal states (the agents are thus not purely reactive any more); however, Brooks argued against calling the internal states representations (Brooks 1991b).
2 The description is idealized- in reality, a walking machine would fall into the category of 'hybrid dynamical systems,' where the notions of attractivity and stability are more complicated.
## Minimal Embodied Cognition
In the case studies described in the previous section, the agents were either mere physical machines or they relied on simple direct sensorimotor loops only- resembling reflex arcs of the biological realm. They were reactive agents constrained to the 'hereand- now' time scale, with no capacity for learning from experience and also no possibility of predicting the future course of events. Although remarkable behaviors were sometimes demonstrated, there are intrinsic limitations.
The introduction of first instances of internal simulation, which goes beyond the 'here- and- now' time scale, is considered the hallmark of cognition by some (e.g., Clark and Grush 1999). This could be a simple forward model (as present already in insectssee Webb 2004) that provides the prediction of a future sensory state given the current state and a motor command (efference copy). Forward models could provide a possible explanation of the evolutionary origin of first simulation/ emulation circuitry 3 and of environmentally decoupled thought- the agent employing primitive 'models' before or instead of directly operating on the world.
Early emulating agents would then constitute the most minimal case of what Dennett calls a Popperian creature- a creature capable of some degree of off- line reasoning and hence able (in Karl Popper's memorable phrase) to 'let its hypotheses die in its stead' (Dennett 1995, p. 375). (Clark and Grush 1999, p. 7)
Importantly, we are still far from any abstract models or symbolic reasoning. Instead, we are dealing with the sensorimotor space and the possibility for the agent to extract regularities in it and later exploit this experience in accordance with its goals. For example, the agent can learn that given a certain visual stimulation, say, from a cup, a particular motor action (reach and grasp) will lead to a pattern of sensory stimulation (in humans: we can feel the cup in the hand). The sensorimotor space plays a key part here and it is critically shaped by the embodiment of the agent and its embedding in the environment: a specific motor signal only leads to a distinct result if embedded in the proper physical setup. If you change the shape and muscles of the arm, the motor signal will not result in a successful grasp.
## Quantifying the Effect of Embodiment Using Information Theory
For cognitive development of an agent, the 'quality' of the sensorimotor space determines what can be learned. First, the type of sensory receptors- their mechanism
3 See Grush (2004) for the similarities and differences between emulation theory (Grush 2004) and simulation theory (Jeannerod 2001).
of transduction- determines what kind of signals the agent's brain or controller will be receiving from the environment. Furthermore, the shape and placement of these sensors will perform an additional transformation of the information that is available in the environment.
For example, different species of insects have evolved different non- homogeneous arrangements of the light- sensitive cells in their eyes, providing an advantageous nonlinear transformation of the input for a particular task. One example is exploiting egomotion together with motion parallax to gauge distance to objects in the environment and eventually facilitate obstacle avoidance. Using a robot modeled after the facet eye of a housefly, Franceschini et al. (1992) showed that the nonlinear arrangement of the facets- more dense in the front than on the side- compensates for the motion parallax and allows uniform motion detection circuitry to be used in the entire eye, which makes it easy for the robot to avoid obstacles with little computation. These findings were confirmed in experiments with artificial evolution on real robots (Lichtensteiger 2004). Artificial eyes with designs inspired by arthropods include Song et al. (2013) and Floreano et al. (2013).
It is not always possible to pinpoint the specific transformation of sensory signals that is facilitated by the morphology as in the previous case. A more general tool is provided by the methods of information theory. Information is used in the Shannon sense here- to quantify statistical patterns in observed variables. The structure or amount of information induced by particular sensor morphology could be captured by different measures, for example, entropy. However, information (structure) in the sensory variables tells only half of the story (a 'passive perception' one in this case), because organisms interact with their environments in a closed- loop fashion: sensory inputs are transformed into motor outputs, which in turn determine what is sensed next. Therefore, the 'raw material' for cognition is constituted by the sensorimotor variables and it is thus crucial to study relationships between sensors and motors, as illustrated by the sensorimotor contingencies (see next section). Furthermore, time is no less important a variable. Lungarella and Sporns (2006) provide an excellent example of the use of information theoretic measures in this context. In a series of experiments with a movable camera system, they could show that, for example, the entropy in the visual field is decreased if the camera is tracking a moving visual target (a red ball) compared to the condition where the movement of the ball and the camera were uncorrelated. This is intuitively plausible, because if the object is kept in the center of the visual field, there is more 'order, ' i.e., less entropy. A collection of case studies on informationtheoretic implications of embodiment in locomotion, grasping, and visual perception is presented by Hoffmann and Pfeifer (2011).
## Sensorimotor Contingencies
Sensorimotor contingencies (SMCs) were originally presented in the influential article by O'Regan and Noë (2001) as the structure of the rules governing sensory changes produced by various motor actions. The SMCs, according to O'Regan and Noë, are the
key 'raw material' upon which perception, cognition, and eventually consciousness operates. Furthermore, they sketch a possible hierarchy ranging from modality- related (or apparatus- related) SMCs to object- related SMCs. The former, the modality- related SMCs, would capture the immediate effect that certain actions (or movements) have on sensory stimulation. Clearly, these would be sensory modality specific (e.g., head movement will induce a different change in the SMCs of the visual and auditory modalities- turning the head will change the visual stimulation almost entirely, whereas changes in the acoustic system will be minimal) and would strongly depend on the sensory morphology. Therefore, this concept is strongly related to what we have discussed in the previous sections: (1) different sensory morphology importantly affects the information flow induced in the sensory receptors and hence also the corresponding SMCs; (2) the effect of action is already constitutively included in the SMC notion itself.
Although conceptually very powerful, the notion of SMCs was not articulated concretely enough in O'Regan and Noë (2001) such that it could be expressed mathematically or directly transferred into a robot implementation, for example. Bührmann et al. (2013) have proposed a formal dynamical systems account of SMCs. They devised a dynamical system description for the environment and the agent, which is in turn split into body, internal state (such as neural activity), motor, and sensory dynamics. Bührmann et al. are making a distinction between sensorimotor (SM) environment, SM habitat, SM coordination, and SM strategy. The SM environment is the relation between motor actions and changes in sensory states, independent of the agent's internal (neural) dynamics. The other notions- from SM habitat to SM strategies- add internal dynamics to the picture. SM habitat refers to trajectories in the sensorimotor space, but subject to constraints given by the internal dynamics that are responsible for generating motor commands, which may depend on previous sensory states as well- an example of closed- loop control. SM coordination then further reduces the set of possible SM trajectories to those 'that contribute functionally to a task. ' For example, specific patterns of squeezing an object in order to assess its hardness would be SM coordination patterns serving object discrimination. Finally, SM strategies take, in addition, 'reward' or 'value' for the agent into account.
As wonderfully illustrated by Beer and Williams (2015), the dynamical systems and information theory are two complementary mathematical lenses through which brainbody-environment systems can be studied. While acknowledging the merits of both frameworks as 'intuition, theory, and experimental pumps' (Beer and Williams 2015), it is probably fair to say that compared to dynamical systems, information theory has been thus far more successfully applied to the analysis of real systems of higher dimensionality. This is true for both natural systems- in particular, brains (Garofalo et al. 2009; Quiroga and Panzeri 2009)- and artificial systems. Thus, to study sensorimotor contingencies in a real robot beyond the simple simulated agents of Bührmann et al. (2013) and Beer and Williams (2015), we chose to use the lens of information theory. Following up on related studies of e.g., Olsson et al. (2004), we conducted a series of studies in a real quadrupedal robot with rich nonlinear dynamics and a collection of sensors from different modalities (Hoffmann et al. 2012; Hoffmann et al. 2014; Schmidt et al. 2013) (see Box 45.1). We have applied the notion of 'transfer entropy'
## Box 45.1 Sensorimotor contingencies in a quadruped robot
Figure 45.1. Robot 'Puppy' and sensorimotor contingencies.
<details>
<summary>Image 1 Details</summary>
### Visual Description
## Quadruped Robot System and Classification Performance
### Overview
The image presents a technical analysis of a quadruped robot system, combining hardware diagrams, kinematic models, and classification performance metrics. The document is divided into seven sections (a-g), progressing from physical components to data-driven performance analysis.
### Components/Axes
**Hardware Components (a-b):**
- (a) Quadruped robot with:
- 4x motors (labeled)
- 4x hip encoders (dashed box)
- 4x knee encoders (dashed box)
- 4x pressure sensors (dashed box)
- (b) Kinematic diagram showing:
- Motor → Hip → Foot joint chain
- Angle measurements (0.00 to 0.45 bits)
- Color scale: 0.00 (light gray) to 0.45 (dark gray)
**Heatmap Analysis (c-f):**
- Axes:
- X-axis: "bits" (0.35 to 0.51)
- Y-axis: Unlabeled (implied joint positions)
- Color scale: 0.35 (light gray) to 0.51 (dark gray)
- Sections:
- (c) Motor-hip-foot relationships
- (d) Hip-foot pressure distribution
- (e) Motor-hip coordination
- (f) Foot pressure distribution
**Classification Performance (g):**
- Bar chart with:
- X-axis: Classification accuracy (%) (40-100)
- Y-axis: Data input categories:
1. Sensory data only
2. Sensory data + action
3. Sensory data + action from 2 epochs
4. Sensory data + action from 3 epochs
- Legend:
- Blue: Mean accuracy
- Red: Best accuracy
### Detailed Analysis
**Hardware Components:**
- Motor configuration shows centralized control unit with red/white wiring
- Encoders positioned at hip/knee joints for motion tracking
- Pressure sensors embedded in foot structure
**Kinematic Models:**
- (b) Diagram uses black arrows for motor forces, gray for structural connections
- (c-f) Heatmaps show gradient intensities indicating joint coordination patterns
- Darker regions (0.48-0.51 bits) suggest high coordination points
**Classification Performance:**
- Sensory data only: ~65% mean accuracy (blue bar)
- Sensory + action: ~75% mean accuracy (blue bar)
- Sensory + action (2 epochs): ~85% mean accuracy (blue bar)
- Sensory + action (3 epochs): ~95% mean accuracy (blue bar)
- Best accuracy values consistently 5-10% higher than mean across all categories
### Key Observations
1. Hardware complexity increases from (a) to (b) with added kinematic details
2. Heatmaps (c-f) show concentrated dark regions at joint intersections
3. Classification accuracy improves significantly with added temporal action data
4. Best accuracy values suggest optimization potential in data fusion approaches
### Interpretation
The data demonstrates a clear correlation between data complexity and classification performance. The 30% accuracy increase from basic sensory data to 3-epoch action data suggests that temporal context significantly enhances system understanding. The consistent 5-10% gap between mean and best accuracy indicates room for optimization in data processing algorithms. The heatmap patterns imply that joint coordination points are critical for accurate classification, particularly in the hip-foot pressure distribution (d) and motor-hip coordination (e). The hardware design in (a) appears optimized for both mobility (motor placement) and sensory feedback (encoder/sensor distribution).
</details>
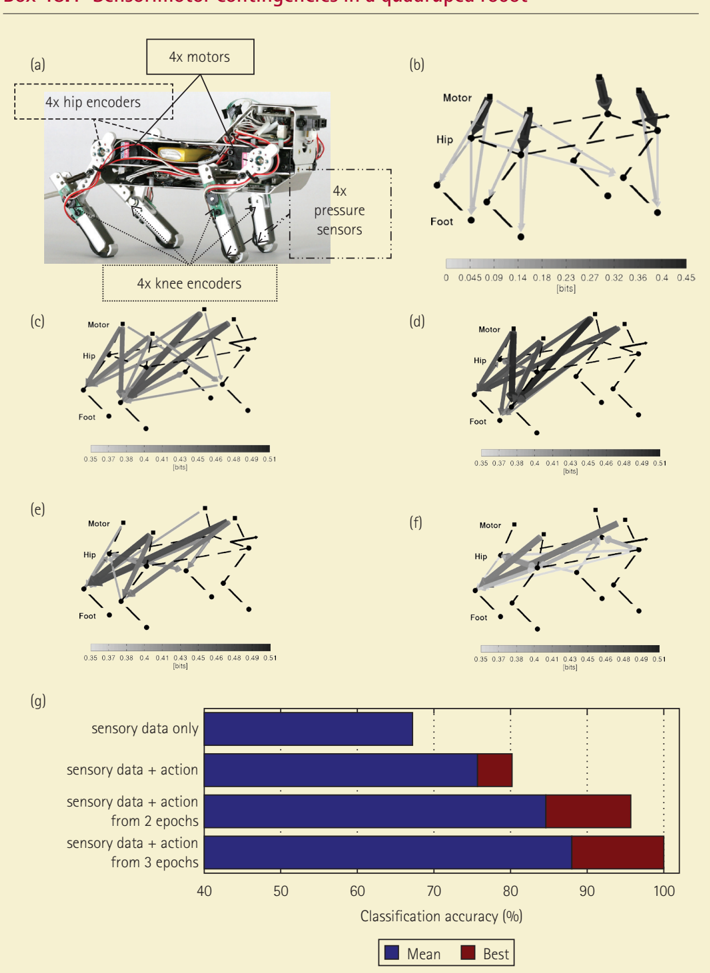
Experiments were conducted on the quadrupedal robot Puppy (Figure 45.1a), which has four servomotors in the hips together with encoders measuring the angle at the joint, four encoders in the passive compliant knees, and four pressure sensors on the feet. We used the notion of 'transfer entropy' from information theory, which can be used to measure
directed information flows between time series. In our case, the time series were collected from individual motor and sensory channels and the information transfer was calculated for every pair of channels two times, once in every direction (say, from hind right motor to front right knee encoder and also in the opposite direction). Loosely speaking, transfer entropy from channel A to channel B measures how well the future state of channel B can be predicted knowing the current state of channel A (see Schmidt et al. 2013 for details).
First, we wanted to investigate the 'sensorimotor structure, ' i.e., the relative strengths of relationships between different sensors and motors, which is intrinsic to the robot's embodiment (body + sensor morphology only). To this end, random motor commands were applied and the relationships between motor and sensory variables were studied, closely resembling the notion of SM environment (Bührmann et al. 2013). The strongest information flows between pairs of channels were extracted and are shown overlaid over the schematic of the Puppy robot (dashed lines) in panel B. The transfer entropy is encoded as thickness and gray level of the arrows. The strongest flow occurs from the motor signals to their respective hip joint angles, which is clear because the motors directly drive the respective hip joints. The motors have a smaller influence on the knee angles (stronger in the hind legs) and on the feet pressure sensors- on the respective legs where the motor is mounted, thus illustrating that body topology was successfully extracted (at the same time, the flows from the hind leg motors and hips to the front knees highlight that the functional relationships are different than the static body structure; see also Schatz and Oudeyer 2009). These patterns are analogous to the modality- related SMCs; just as we can predict what will be the sensory changes induced by moving the head, the robot can predict the effects of moving the hind leg, say.
In a second step, we studied the relationships in the sensorimotor space when the robot was running with specific coordinated periodic movement patterns or gaits. The results for two selected gaits- turn left and bound right * - are shown in panels C and D, respectively. The flows from motors to the hip joints, which would again dominate, were left out of the visualization. The plots clearly demonstrate the important effect of specific action patterns in two ways. First, they markedly differ from the random motor command situation: the dominant flows are different and, in addition, the magnitude of the information flows is bigger (the number of bits- note the different range of the color bar compared to B), illustrating how much information structure is induced by the 'neural pattern generator. ' Second, they also significantly differ between themselves. The 'turn left' gait in panel C reveals the dominant action of the right leg and in particular the knee joint. In the 'bound right' gait in D, the motor signals are predictive of the sensory stimulation in the hind knees and also the left foot. The gaits were obtained by optimizing the robot's performance for speed or for turning and thus correspond to patterns that are functionally relevant for the robot and can even be said to carry 'value. ' Thus, in the perspective of Bührmann et al. (2013), our findings about the sensorimotor space using the gaits can be interpreted as studying the SM coordination or even SM strategy of the quadruped robot.
Finally, next to the embodiment or morphology (shape of the body and limbs, type and placement of sensors and effectors, etc.) and the brain (the neural dynamics responsible for generating the coordinated motor command sequences), the SMCs are co-determined by the environment as well. All the results thus far came from sensorimotor data collected from the robot running on a plastic foil ground (low friction). Panels E and F depict how the information flows for the bound right gait are modulated when the robot runs on a different ground (E- Styrofoam, F- rubber). The overall pattern is similar to D, but the flows to the left foot disappear, and eventually flows to the left knee joint become dominant. This
is because the posture of the robot changed: the left foot contacts the ground at a different angle now, inducing less stimulation in the pressure sensor. Also, as the friction increases (from the foil over Styrofoam to rubber), the push- off during stance of the left hind leg becomes stronger, resulting in more pronounced bending of the knee. Finally, since the high- friction ground poses more resistance to the robot's movements, the trajectories are less smooth and the overall information flow drops.
While all the components (body, brain, environment) have a profound effect on the overall sensorimotor space, our analysis reveals that in this case, the gait used (as prescribed primarily by the 'neural/ brain' dynamics) is a more important factor than the environment (the ground)- the latter seems to modulate the basic structure of information flows induced by the gait. This has important consequences for the agent when it is to learn something about its environment and perform perceptual categorization, for example. In order to investigate this quantitatively, we have presented the robot with a terrain (the surface/ ground it was running on) classification task. Relying on sensory information alone leads to significantly worse terrain classification results than when the gait is explicitly taken into account in the classification process (Hoffmann, Stepanova, and Reinstein 2014). Furthermore, in line with the predictions of the sensorimotor contingency theory, longer sensorimotor sequences are necessary for object perception (Maye and Engel 2012). That is, while in short sequences (motor command, sensory consequence), modality- related SMCs (panel B) will be dominant, longer interactions will allow objects the agent is interacting with to stand out. Using data from our robot, this is convincingly demonstrated in panel G. The first row shows classification results when using data from one sensory epoch (two seconds of locomotion) collapsed across all gaits, i.e., without the action context. Subsequent rows report results where classification was performed separately for each gait and increasingly longer interaction histories were available. 'Mean' values represent the mean performance; 'best' are classification results from the gait that facilitated perception the most (see Hoffmann et al. 2012 for details).
* 'Turn left' was a movement pattern dominated by the action of the right hind leg that was pushing the robot forward and left. Regarding 'bound right, ' bounding gait is a running gait used by small mammals. It is similar to gallop, and features a flight phase, but is characterized by synchronous action of every pair of legs. However, in this study, we used lower speeds without an aerial phase. In addition, the symmetry of the motor signals was slightly disrupted, resulting in a right- turning motion.
from information theory, which can be used to characterize sensorimotor flows in the robot- for example, how strongly sensors are affected by motor commands- and we tried to isolate the effects of the body, motor programs (gaits), and environment in the agent's sensorimotor space. Finally, we tested the predictions of SMC theory regarding object discrimination. In our investigations, we have chosen the situated perspectiveanalyzing only the relationships between sensory and motor variables that would also be available to the agent itself. However, information- theoretic methods can also be productively applied to study relationships between internal and external variables, such as between sensory or neuronal states and some properties of an external object (e.g., its size, Beer and Williams 2015; or any other property that can be expressed numerically). Using this approach, one can obtain important insights into the operation and temporal
evolution of categorization, for example. Performing this in the ground discrimination scenario on the quadrupedal robot constitutes our future work.
While the studies on 'minimally cognitive agents' are of fundamental importance and lead to valuable insights for our understanding of intelligent behavior, the ultimate target is, of course, human cognition. Toward this end, one may want to resort to more sophisticated tools, for example, humanoid robots.
## Human- like Cognition in Robots
In the previous section, we showed how robots can be beneficial in operationalizing, formalizing, and quantifying ideas, concepts, and theories that are important for understanding cognition but that are often not articulated in sufficient detail. An obvious implication of this analysis is that the kind of cognition that emerges will be highly dependent on the body of the agent, its sensorimotor apparatus, and the environment it is interacting with. Thus, to target human cognition, the robot's morphology- shape, type of sensors, and their distribution, materials, actuators- should resemble that of humans as closely as possible. Now we have to be realistic: approximating humans very closely would imply mimicking their physiology, the sensors in the body, and the inner organs, the muscles with comparable biological instantiation, and the bloodstream that supplies the body with energy and oxygen. Only then could the robot experience the true concept, e.g., of being thirsty or out of breath, hearing the heart pumping, blushing, or the feeling of quenching the thirst while drinking a cold beer in the summer. So, even if, on the surface, a robot might be almost indistinguishable from a human (like, for example, Hiroshi Ishiguro's recent humanoid 'Erica'), we have to be aware of the fundamental differences: comparatively very few muscles and tendons, no actuators that can get sore when overused, no sensors for pain, only low- density haptic sensors, no sweat glands in the skin, and so on and so forth. Thus, 'Erica' will have a very impoverished concept of drinking or feeling hot. In other words, we have to make substantial abstractions.
Just as an aside, making abstractions is nothing bad- in fact, it is one of the most crucial ingredients of any scientific explanation because it forces us to focus on the essentials, ignoring whatever is considered irrelevant (the latter most likely being the majority of things that we could potentially take into account). Thus, the specifics of the robot's cognition- its concepts, its body schema- will clearly diverge from that of humans, but the underlying principles will, at a certain level of abstraction, be the same. For example, it will have its own sensorimotor contingencies, it will form cross- modal associations through Hebbian learning, and it will explore its environment using its sensorimotor setup. So if the robot says 'glass, ' this will relate to very different specific sensorimotor experiences, but if the robot can recognize, fill, and hand a 'glass' to a human for drinking, it makes sense to say that the robot has acquired the concept of 'glass. '
Because the acquisition of concepts is based on sensorimotor contingencies, which in turn require actions on the part of the agent, and because the patterns of sensory stimulation are associated with the respective motor signals, the robot platforms of choice will ideally be tendon- driven- just like humans who use muscles and tendons for
movements. Given our discussion on abstraction earlier, we can also study concept acquisition in robots that have motors in the joints- we just have to be aware of the concrete differences. Still, the principles governing the robot's cognition can be very similar to that of humans (see Box 45.2 for examples of different types of humanoid robots).
## BOX 45.2 Humanoid embodiment for modeling cognition
<details>
<summary>Image 2 Details</summary>
### Visual Description
## Photograph: Human-Robot Interaction Scene
### Overview
The image depicts two individuals (a woman with short hair and a woman with long hair) leaning forward to kiss a humanoid robot. The robot has a white, spherical head with two black circular "eyes" and a simple mouth-like feature. Its torso is exposed, revealing mechanical components, wiring, and structural elements. The background includes an abstract painting with red, white, and gray tones.
### Components/Axes
- **Robot**:
- **Head**: White, spherical, with two black circular "eyes" and a central mouth-like slit.
- **Torso**: Exposed mechanical framework, including metallic plates, wires, and joints.
- **Limbs**: Partially visible arms with articulated joints and white gloves.
- **Individuals**:
- **Left Person**: Short hair, black blazer over a white top, black pants.
- **Right Person**: Long dark hair, black blazer, patterned black-and-white pants.
- **Background**: Abstract mural with red, white, and gray geometric patterns.
### Detailed Analysis
- **Robot Design**:
- The robot’s head is minimalist, with no visible sensors or complex features beyond the "eyes" and mouth.
- The torso exposes internal mechanics, suggesting a focus on transparency or educational demonstration.
- **Human Interaction**:
- Both individuals are bent forward, lips nearly touching the robot’s head.
- Their body language implies curiosity or testing the robot’s responsiveness to physical contact.
- **Environment**:
- The setting appears to be an exhibition or lab, indicated by the clean, neutral flooring and the abstract mural.
### Key Observations
- No textual labels, legends, or axis markers are visible in the image.
- The robot’s design prioritizes simplicity and mechanical transparency over advanced features.
- The individuals’ attire (blazers) suggests a formal or professional context, contrasting with the playful interaction.
### Interpretation
This image likely illustrates a study or demonstration of human-robot interaction, emphasizing emotional or social engagement. The robot’s exposed mechanics may symbolize openness or vulnerability in human-machine relationships. The absence of text or branding focuses attention on the interaction itself, possibly highlighting themes of trust, curiosity, or the boundaries between human and artificial intelligence. The abstract mural in the background adds an artistic layer, suggesting the scene is staged for conceptual or artistic purposes rather than functional testing.
**Note**: No factual data, numerical values, or structured information (e.g., charts, tables) is present in the image. The description is based solely on visible elements and contextual inference.
</details>
<details>
<summary>Image 3 Details</summary>
### Visual Description
## Photograph: Humanoid Robot Prototype
### Overview
The image depicts a humanoid robot with a skeletal mechanical structure, positioned against a green screen background. The robot is shown in a dynamic pose with one arm raised and the other bent at the elbow, suggesting articulation and mobility. The design emphasizes a blend of skeletal aesthetics (exposed joints and wiring) with functional components.
### Components/Axes
- **Textual Elements**:
- Label "(c)" in the top-left corner (likely indicating a figure reference in a document).
- No additional labels, axis titles, legends, or numerical data present.
- **Visual Components**:
- **Skeletal Frame**: Metallic ribcage, spine, and limb structures with visible wiring and mechanical joints.
- **Wiring**: Black cables and connectors distributed across the torso, limbs, and head.
- **Head**: Stylized humanoid face with a metallic skull-like design and two visible "eyes."
- **Feet**: White sneakers attached to articulated legs with exposed mechanical components.
- **Background**: Uniform green screen (likely for chroma key compositing).
### Detailed Analysis
- **Textual Content**:
- Only the label "(c)" is present, with no other textual annotations, legends, or data points.
- No numerical values, scales, or categorical labels are visible.
- **Spatial Grounding**:
- Label "(c)" is positioned in the top-left corner, outside the robot’s frame.
- No other elements (e.g., legends, axis markers) are spatially anchored.
### Key Observations
- The robot’s design prioritizes a skeletal aesthetic, with exposed mechanical components and wiring.
- The absence of textual annotations or data suggests the image is a standalone prototype visualization rather than a data-driven diagram.
- The green screen background implies the image is intended for post-processing or integration into a larger technical document.
### Interpretation
This image likely serves as a technical illustration of a humanoid robot prototype, emphasizing its mechanical complexity and mobility. The lack of textual data or annotations indicates it is not intended to convey quantitative information but rather to showcase design features. The label "(c)" suggests it is part of a sequence (e.g., Figure 3 in a report), but no further context is provided in the image. The green screen implies the robot’s pose and articulation are the focal points, with no environmental context.
**Note**: The image contains no factual or numerical data beyond the label "(c)." All descriptions are based on visible structural and compositional elements.
</details>
<details>
<summary>Image 4 Details</summary>
### Visual Description
## Diagram: Robotic Arm System Architecture
### Overview
The image depicts a complex robotic arm system with visible mechanical components, wiring, and labeled subsystems. The structure includes articulated joints, actuators, and control interfaces, with text annotations indicating subsystem names and affiliations.
### Components/Axes
- **Labels**:
- "(b)" (top-left corner, likely a figure identifier).
- "ai lab" (upper section, possibly denoting an AI integration module).
- "starmind" (central section, likely a core processing or control unit).
- "robodance" (right section, possibly related to motion or performance optimization).
- **Mechanical Elements**:
- Articulated joints with visible actuators and wiring.
- Wires in multiple colors (red, blue, yellow, green) connecting components.
- Structural framework with mounting points and mechanical linkages.
### Detailed Analysis
- **Textual Elements**:
- "ai lab" is positioned on the upper horizontal bar, suggesting a focus on artificial intelligence integration.
- "starmind" is centered, implying a central processing or decision-making role.
- "robodance" is on the right arm, potentially indicating a subsystem for dynamic movement or coordination.
- **Wiring**:
- Color-coded wires (red, blue, yellow, green) are distributed across the arm, likely representing power, data, or control signals.
- No explicit legend is visible to confirm wire functions, but color coding is standard in technical diagrams.
- **Mechanical Design**:
- The arm features multiple degrees of freedom, with visible gears, motors, and mounting brackets.
- The structure is modular, with distinct sections for different functional roles.
### Key Observations
- The labels "ai lab," "starmind," and "robodance" are spatially distributed, suggesting modular subsystems with specialized functions.
- The absence of a legend for wire colors limits precise interpretation of their roles.
- The mechanical complexity implies advanced control and actuation capabilities.
### Interpretation
The diagram illustrates a robotic arm system designed for high-precision tasks, integrating AI ("ai lab") for decision-making, a central processing unit ("starmind"), and motion optimization ("robodance"). The modular design and extensive wiring highlight the system's sophistication, though the lack of a wire legend introduces ambiguity. The "(b)" label suggests this is part of a larger technical documentation set, possibly a figure in a research paper or engineering manual. The system’s architecture emphasizes adaptability and integration of multiple subsystems for coordinated operation.
</details>
<details>
<summary>Image 5 Details</summary>

### Visual Description
## 3D Model Diagram: Annotated Infant Pose
### Overview
The image depicts a 3D-rendered model of an infant in a seated position. The model is covered with numerous small red dots distributed across its surface. The infant is oriented with its back facing the viewer, legs spread apart, and hands raised near the face. The background is a plain, light beige color. A label "(d)" is visible in the top-left corner of the image.
### Components/Axes
- **Primary Elements**:
- 3D infant model (neutral pose, seated).
- Red dot markers (distributed across the entire body).
- Label "(d)" in the top-left corner.
- **Axes/Scales**:
- No explicit axes, scales, or numerical markers present.
- No legend or key explaining the red dots.
- **Spatial Grounding**:
- Label "(d)" is positioned in the top-left corner, outside the main model.
- Red dots are uniformly distributed across the model’s surface, with no apparent pattern or clustering.
### Detailed Analysis
- **Model Features**:
- The infant’s posture is anatomically neutral: legs spread, hands near the face, and a relaxed torso.
- Red dots are evenly spaced but vary slightly in density, with higher concentrations near joints (e.g., knees, elbows) and the head.
- **Textual Elements**:
- Only the label "(d)" is present, with no additional annotations, legends, or textual descriptions.
- No numerical values, categories, or data tables are visible.
### Key Observations
1. The red dots likely represent tracking markers or data points for motion analysis, but their purpose is undefined due to the absence of a legend.
2. The model’s pose suggests a focus on posture or movement study, though no motion data is visually represented.
3. The lack of contextual elements (e.g., environment, scale references) limits interpretability.
### Interpretation
The image appears to be a placeholder or template for a motion-capture or biomechanical study. The red dots may correspond to sensor placements for tracking joint angles or body movements, but without a legend or accompanying data, their exact function remains speculative. The neutral pose and absence of dynamic elements suggest the model is intended for baseline analysis rather than active motion study. The label "(d)" implies this is part of a series (e.g., panels a-d), but no other panels are provided for cross-reference.
**Note**: No factual or numerical data is present in the image. The description is limited to visible structural and positional details.
</details>
<details>
<summary>Image 6 Details</summary>
### Visual Description
## Photograph: Humanoid Robot Prototype
### Overview
The image depicts a humanoid robot with a stylized, anthropomorphic design. Key features include a beige head with red facial markings (eyebrows and mouth), a black torso, silver mechanical joints, and articulated hands. The robot is positioned against a neutral gray fabric backdrop, suggesting a controlled environment like a lab or studio.
### Components/Axes
- **Head**:
- Material: Smooth, glossy beige polymer.
- Facial Features: Red LED-like eyebrows and mouth; no visible eyes (possibly covered or integrated into the head).
- Accessories: Black headphones or sensor array on the left side.
- **Torso**:
- Black, segmented casing with visible metallic actuators and wiring.
- Central compartment housing internal components (e.g., power systems, processors).
- **Limbs**:
- Arms: Black padded sleeves with exposed silver mechanical fingers and joints.
- Hands: Articulated fingers with metallic tips, designed for precision tasks.
- Left Arm: Red indicator light near the elbow joint.
- **Base/Stance**:
- Not fully visible; implied to be mounted on a stable platform.
### Detailed Analysis
- **Color Coding**:
- Red accents (eyebrows, mouth, left-arm light) may denote functional status or emotional expression.
- Silver components suggest high-precision engineering (e.g., titanium or aluminum alloys).
- **Design Philosophy**:
- Human-like proportions for interaction studies or public engagement.
- Modular construction for maintenance or customization.
- **Lighting**:
- Soft, diffused lighting highlights the robot’s texture and metallic elements.
### Key Observations
1. **Red Markings**: The red eyebrows and mouth could indicate a "neutral" or "alert" state, common in human-robot interaction research.
2. **Exposed Joints**: The visible mechanical components suggest a focus on transparency in design, possibly for educational purposes.
3. **Headphones/Sensors**: The black device on the head may serve as a microphone array or environmental sensor suite.
4. **Red Light**: Positioned on the left arm, this could signal operational status (e.g., active, error, or communication mode).
### Interpretation
The robot’s design prioritizes **human-like aesthetics** combined with **transparent mechanical functionality**, likely for applications in education, research, or public demonstration. The red accents may serve dual purposes: functional indicators and emotional expression to enhance user engagement. The absence of visible eyes or advanced sensors on the head implies a focus on tactile or auditory interaction over visual perception. The exposed joints and modular torso suggest a prototype stage, emphasizing adaptability and repairability over finalized commercialization.
No textual data, charts, or diagrams are present in the image. All analysis is based on visual inspection of the robot’s physical attributes and contextual clues.
</details>
Figure 45.2. Humanoid robots.
<details>
<summary>Image 7 Details</summary>

### Visual Description
## Photograph: Portrait of a Woman in Purple Scarf and Dark Shirt
### Overview
The image depicts a woman with shoulder-length brown hair, wearing a dark-colored button-up shirt and a vibrant purple scarf. The background is uniformly dark, emphasizing the subject. No textual elements, charts, diagrams, or data are present.
### Components/Axes
- **No axes, labels, legends, or numerical data** are visible.
- **No textual annotations** (e.g., titles, captions, or embedded text) are present.
### Detailed Analysis
- **Subject**: A woman with a neutral expression, facing slightly to the side.
- **Clothing**:
- **Shirt**: Dark-colored (likely black or navy), with visible buttons.
- **Scarf**: Deep purple, draped over the shoulders, with a textured pattern.
- **Lighting**: Soft, even illumination, highlighting the subject’s face and clothing.
- **Background**: Solid black, providing high contrast.
### Key Observations
- No data points, trends, or numerical values to analyze.
- The image focuses on fashion or portraiture, with no contextual or technical elements.
### Interpretation
This image appears to be a stylized portrait, likely for fashion, modeling, or artistic purposes. The absence of textual or data-driven elements suggests it is not intended for technical or analytical use. The purple scarf may symbolize creativity or boldness, but no explicit meaning is provided.
**Note**: The image contains no factual or data-driven information. All descriptions are based on visible visual elements.
</details>
<details>
<summary>Image 8 Details</summary>

### Visual Description
## Diagram: Robotic Arm Kinematic Model
### Overview
The image depicts a schematic diagram of a robotic arm with labeled joints, movement trajectory, and coordinate axes. The arm is shown in a 3D Cartesian coordinate system (X, Y, Z) with a defined trajectory path.
### Components/Axes
- **Legend**: Located in the top-right corner.
- **Purple**: Base Joint
- **Blue**: Shoulder Joint
- **Gray**: Elbow Joint
- **Orange**: Wrist Joint
- **Red**: Trajectory Path
- **Axes**:
- **X-axis**: Horizontal (left-right)
- **Y-axis**: Vertical (up-down)
- **Z-axis**: Depth (front-back)
- Scale: -10 to 10 (approximate, no explicit units provided).
### Detailed Analysis
1. **Robotic Arm Structure**:
- **Base Joint**: Fixed at origin (0,0,0), colored purple.
- **Shoulder Joint**: Positioned at (2,3,0), colored blue.
- **Elbow Joint**: Located at (2,3,5), colored gray.
- **Wrist Joint**: Positioned at (2,3,8), colored orange.
- **End-Effector**: Extends from wrist joint to (2,3,10).
2. **Trajectory**:
- A red circular path centered at the base joint (0,0,0), suggesting rotational motion around the base.
3. **Movement Indicators**:
- Blue arrows show directional flow from base to end-effector, implying sequential joint activation.
### Key Observations
- The trajectory is confined to the base joint’s rotational axis, indicating limited 3D mobility in this schematic.
- Joint positions align linearly along the Z-axis, suggesting a serial kinematic chain.
- No explicit numerical values for joint angles or velocities are provided.
### Interpretation
This diagram illustrates the kinematic structure of a 4-DOF (Degrees of Freedom) robotic arm, emphasizing joint positions and a base-centric trajectory. The color-coded legend clarifies component roles, while the trajectory highlights potential operational constraints (e.g., base rotation dominance). The absence of numerical data limits quantitative analysis but emphasizes spatial relationships critical for motion planning. The schematic likely serves as a foundational reference for control system design or simulation.
</details>
<details>
<summary>Image 9 Details</summary>

### Visual Description
## Diagram: Robotic Hand Interaction with Sphere
### Overview
The image depicts a technical diagram of a robotic hand interacting with a red spherical object. The hand is shown in a grasping motion, with articulated fingers and a segmented structure. A red sphere is positioned near the fingertips, suggesting a contact or manipulation scenario. Blue circular markers are distributed across the hand and sphere, likely representing sensors, contact points, or data collection nodes. The background is a neutral light beige.
### Components/Axes
- **Robotic Hand**:
- Segmented structure with visible joints and actuators.
- Fingers are spread in a grasping posture.
- Blue circular markers are concentrated on the palm, fingertips, and joints.
- **Red Sphere**:
- Positioned near the fingertips, partially overlapping with the hand.
- Blue markers are also present on the sphere’s surface.
- **Blue Circular Markers**:
- Uniformly distributed across the hand and sphere.
- No labels or legends are visible to clarify their exact purpose.
### Detailed Analysis
- **Robotic Hand Design**:
- The hand’s segmented structure implies modularity, with distinct sections for articulation.
- Blue markers on the palm and fingertips suggest pressure or proximity sensors.
- Joints (e.g., knuckles) have fewer markers, possibly indicating torque or position sensors.
- **Sphere Interaction**:
- The red sphere’s placement and overlapping with the hand indicate a focus on object manipulation.
- Blue markers on the sphere may represent contact points or environmental feedback.
- **Color Coding**:
- Red sphere: Likely denotes the target object or a specific material property (e.g., elasticity).
- Blue markers: Uniform color suggests a single sensor type or data category.
### Key Observations
1. **Sensor Distribution**: Blue markers are denser on the fingertips and palm, aligning with areas critical for tactile feedback.
2. **Grasping Dynamics**: The hand’s posture and sphere placement imply a study of grasp stability or force application.
3. **Lack of Labels**: No textual annotations are present, limiting direct interpretation of sensor functions or system parameters.
### Interpretation
The diagram emphasizes the robotic hand’s design for object interaction, with sensor placement prioritizing tactile feedback zones. The red sphere’s role as a test object highlights applications in precision manipulation or adaptive grasping. The absence of textual data suggests the diagram is a conceptual or schematic representation, requiring supplementary documentation for technical specifics. The blue markers’ uniformity implies a standardized sensor array, though their exact function (e.g., force, temperature, proximity) remains undefined without legends.
**Note**: No textual information (labels, legends, axis titles) is present in the image. All analysis is based on visual components and spatial relationships.
</details>
<details>
<summary>Image 10 Details</summary>

### Visual Description
## Photograph: Humanoid Robot with Tablet Interface
### Overview
The image depicts a humanoid robot standing upright against a neutral background. The robot has a white, glossy exterior with a simplified humanoid form, featuring a head with two visible sensors (likely cameras) for eyes, a torso, and articulated limbs. It holds a tablet-like device in its right hand, displaying a colorful interface with circular icons. The robot’s base is triangular and wide, designed for stability. A label "(g)" is visible in the top-left corner of the image, suggesting it is part of a series or figure in a technical document.
### Components/Axes
- **Robot Design**:
- **Head**: Spherical with two eye-like sensors (left eye emits a faint blue light).
- **Torso**: Cylindrical with a flat surface for mounting the tablet.
- **Limbs**: Simplified, jointed arms and hands; the right hand grips the tablet.
- **Base**: Triangular, three-pronged structure for balance.
- **Tablet Interface**:
- Screen displays a grid of six circular icons (colors: red, green, blue, yellow, purple, and orange).
- No text or labels visible on the tablet screen.
- **Label**:
- "(g)" in the top-left corner, likely indicating a figure identifier (e.g., "Figure (g)").
### Detailed Analysis
- **Robot Posture**: Neutral stance, facing forward. Left arm hangs by its side; right arm extended to hold the tablet.
- **Tablet Orientation**: Held horizontally at chest level, screen facing the viewer.
- **Base Stability**: Triangular design ensures even weight distribution.
- **Lighting**: Even illumination, no shadows, suggesting controlled indoor lighting.
### Key Observations
1. The robot’s design prioritizes minimalism and functionality, with no visible mechanical complexity.
2. The tablet interface implies interactive capabilities, though the icons’ purpose is unspecified.
3. The label "(g)" suggests this image is part of a larger technical or research document.
### Interpretation
The robot’s design and tablet interface suggest applications in human-robot interaction, assistive technology, or research environments. The absence of visible text on the tablet screen implies the interface may be context-dependent or user-specific. The label "(g)" indicates this image is likely used to reference the robot in a study or technical analysis, possibly comparing multiple robotic systems (e.g., labeled A, B, C, etc.). The robot’s neutral posture and stable base emphasize its role as a stationary or semi-mobile platform for demonstrations or experiments.
No numerical data, trends, or quantitative values are present in the image. The focus is on the robot’s physical design and interface, rather than operational metrics.
</details>
A large number of humanoid robots have been developed over the last decades and many of them can, one way or other, be used to study human cognition. Given that all of them to date are very different from real humans- each of them, implicitly or explicitly, embodies certain types of abstractions- there is no universal platform, but they have all been developed with specific goals in mind. Here we present a few examples and discuss the ways in which they are employed in trying to ferret out the principles of human cognition. The categories shown in Figure 45.2 are musculoskeletal robots (Roboy and Kenshiro), 'baby' robots with sensorized skins (iCub and fetus simulators), and social interaction robots (Erica and Pepper).
In order to use the robots for learning their own complex dynamics and for building up a body schema, both Roboy and Kenshiro (Nakanishi et al. 2012) need to be equipped with many sensors so that they can 'experience' the effect of a particular actuation pattern. Given rich sensory feedback, using the principle that every action leads to sensory stimulation, both these robots can, in principle, employ motor babbling in order to learn how to move. Especially for Kenshiro, with his very large number of muscles, learning is a must. A very important step in this direction is the work of Richter et al. (2016), who have combined a musculoskeletal robotics toolkit (Myorobotics) with a scalable neuromorphic computing platform (SpiNNaker) and demonstrated control of a musculoskeletal joint with a simulated cerebellum.
Finally, if the interest is social interaction, it might be more productive to use robots like Erica or Pepper. Both Erica and Pepper are somewhat limited in their sensorimotor abilities (especially haptics), but are endowed with speech understanding and generation facilities; they can recognize faces and emotions; and they can realistically display any kind of facial expression.
## Musculoskeletal robots: Roboy and Kenshiro
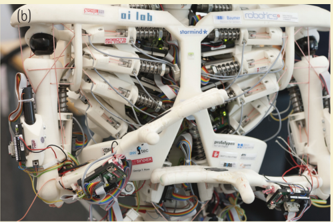
Figure 45.2a. Roboy overview: The musculoskeletal design can be clearly observed. At this point, Roboy has 48 'muscles. ' Eight are dedicated to each of the shoulder joints. This can no longer be sensibly programmed: learning is a necessity. Currently, Roboy serves as a research platform for the EU/ FET Human Brain Project to study, among other things, the effect of brain lesions on the musculoskeletal system. Because it has the ability to express a vast spectrum of emotions, it can also be employed to investigate human-robot interaction, and as an entertainment platform.
Credit: © Embassy of Switzerland in the United States of America.
Figure 45.2b. Close- up of the muscle- tendon system. Although the shoulder joint is distinctly dissimilar to a human one- for example, it doesn't have a shoulder bladeit is controlled by eight muscles, which require substantial skills in order to move properly: which muscles have to be actuated to what extent in order to achieve a desired movement?
Credit: © Erik Tham/ Corbis Documentary/ Getty Images.
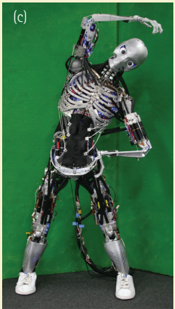
Figure 45.2c. Kenshiro's musculoskeletal setup. The musculoskeletal design is clearly visible. At this point, Kenshiro has 160 'muscles'- 50 in the legs, 76 in the trunk, 12 in the
shoulder, and 22 in the neck. In terms of musculoskeletal system, it is the one robot that most closely resembles the human. So, if learning of the dynamics in this system is the goal, Kenshiro will be the robot of choice. Note that although Kenshiro is 'closest' to a human in this respect, it is still subject to enormous abstractions. Currently, Kenshiro serves as a research platform at the University of Tokyo to investigate tendon- controlled systems with very many degrees of freedom (Nakanishi et al. 2012).
Credit: Photo courtesy Yuki Asano.
## 'Baby' robots with sensitive skins
Figure 45.2d. Fetus simulator. A musculoskeletal model of human fetus at 32 weeks of gestation has been constructed and coupled with a brain model comprising 2.6 million spiking neurons (Yamada et al. 2016). The figure shows the tactile sensor distribution, which was based on human two- point discrimination data.
Reproduced from Yasunori Yamada, Hoshinori Kanazawa, Sho Iwasaki, Yuki Tsukahara, Osuke Iwata, Shigehito Yamada, and Yasuo Kuniyoshi, An Embodied Brain Model of the Human Foetus, Scientific Reports , 6 (27893), Figure 1d, doi:10.1038/ srep27893 © 2016 Yasunori Yamada, Hoshinori Kanazawa, Sho Iwasaki, Yuki Tsukahara, Osuke Iwata, Shigehito Yamada, and Yasuo Kuniyoshi. This work is licensed under the Creative Commons Attribution 4.0 International License (CC BY 4.0). It is attributed to the authors Yasunori Yamada, Hoshinori Kanazawa, Sho Iwasaki, Yuki Tsukahara, Osuke Iwata, Shigehito Yamada, and Yasuo Kuniyoshi.
Figure 45.2e. The iCub baby humanoid robot. The iCub (Metta et al. 2010) has the size of a roughly four- year-old child and corresponding sensorimotor capacities: 53 degrees of freedom (electrical motors), two stereo cameras in a biomimetic arrangement, and over 4,000 tactile sensors covering its body. The panel shows the robot performing self- touch and corresponding activations in the tactile arrays of the left forearm and right index finger.
## Social interaction robots: Erica and Pepper
Figure 45.2f. Erica, the latest creation of Prof. Hiroshi Ishiguro, was designed specifically with the goal of imitating human speech and body language patterns, in order to have 'highly natural' conversations. It also serves as a tool to study human-robot interaction, and social interaction in general. Moreover, because of its close resemblance to humans, the 'uncanny valley'- the fact that people get uneasy when the robots are too humanlike- hypothesis can be further explored and analyzed (see, e.g., Rosenthal- von der Pütten, Marieke, and Weiss 2014, where the Geminoid HI- 1 modeled after Prof. Ishiguro was used).
Credit: Photo courtesy of Hiroshi Ishiguro Laboratory, ATR and Osaka University.
Figure 45.2g. Pepper, a robot developed by Aldebaran (now Softbank Robotics), although much simpler (and much cheaper!) than Erica, is used successfully on the one hand to study social interaction, for entertainment, and to perform certain tasks (such as selling Nespresso machines to customers in Japan).
## The Role of Development
A very powerful approach to deepen our understanding of cognition, and one that has been around for a long time in psychology and neuroscience, is to study ontogenetic development. During the past two decades or so, this idea has been adopted by the robotics community and has led to a thriving research field dubbed 'developmental robotics.' Now, a crucial part of ontogenesis takes place in the uterus. There, tactile sense is the first to develop (Bernhardt 1987) and may thus play a key role in the organism's learning about first sensorimotor contingencies, in particular, those pertaining to its own body (e.g., hand- to- mouth behaviors). Motivated by this fact, Mori and Kuniyoshi (2010) developed a musculoskeletal fetal simulator with over 1,500 tactile receptors, and studied the effect of their distribution on the emergence of sensorimotor behaviors. Importantly, with a natural (non-homogeneous) distribution, the fetus developed 'normal' kicking and jerking movements (i.e., similar to those observed in a human fetus), whereas with a homogeneous allocation it did not develop any of these behaviors. Yamada et al. (2016), using a similar fetal simulator and a large spiking neural network brain model, have further studied the effects of intrauterine (vs. extrauterine) sensorimotor experiences on cortical learning of body representations. A physical version- the fetusoid- is currently under development (Mori et al. 2015). Somatosensory (tactile and proprioceptive) inputs continue to be of key importance also in early infancy when 'infants engage in exploration of their own body as it moves and acts in the environment. They babble and touch their own body, attracted and actively involved in investigating the rich intermodal redundancies, temporal contingencies, and spatial congruence of self- perception' (Rochat 1998, p. 102). The iCub baby humanoid robot (Metta et al. 2010) (Box 45.2E), equipped with a wholebody tactile array (Maiolino et al. 2013) comprising over 4,000 elements, is an ideal platform to study these processes. The study of Roncone et al. (2014) on self- calibration using self- touch is a first step in this direction.
## Applications Of Human- Like Robots
Finally, this research strand- employing humanoid robots to study human cognitionhas also important applications. In traditional domains and conventional tasks- such as pick- and- place operations in an industrial environment- current factory automation robots are doing just fine. However, robots are starting to leave these constrained domains, entering environments that are far less structured and are starting to share their living space with humans. As a consequence, they need to dynamically adapt to unpredictable interactions and guarantee their own as well as others' safety at every moment. In such cases, more human- like characteristics- both physical and 'mental'are desirable. Box 45.3 illustrates how more brain- like body representations can help robots to become more autonomous, robust, and safe. The possibilities for future applications of robots with cognitive capacities are enormous, especially in the rapidly
## BOX 45.3 Body schema in humans vs. robots
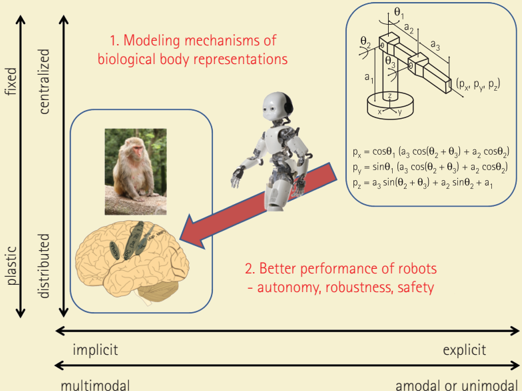
Figure 45.3. Characteristics of body representations.
<details>
<summary>Image 11 Details</summary>
### Visual Description
## Diagram: Modeling Mechanisms of Biological Body Representations and Robot Performance
### Overview
The diagram illustrates the relationship between modeling mechanisms of biological body representations and the performance of robots. It emphasizes how implicit, multimodal, and distributed biological representations contribute to enhanced autonomy, robustness, and safety in robotic systems. The diagram is divided into two main sections, with arrows and labels indicating the flow of information and the resulting performance improvements.
### Components/Axes
- **Vertical Axis (Left Side)**:
- Labels: "fixed", "centralized", "plastic", "distributed"
- Orientation: Top to bottom (fixed at the top, distributed at the bottom)
- **Horizontal Axis (Bottom)**:
- Labels: "implicit", "multimodal", "explicit", "amodal or unimodal"
- Orientation: Left to right (implicit on the left, amodal or unimodal on the right)
- **Main Diagram Elements**:
- **Section 1**: "Modeling mechanisms of biological body representations"
- Contains an image of a monkey and a human brain cross-section.
- Arrows point from the brain to a robot, indicating the influence of biological representations on robotic performance.
- **Section 2**: "Better performance of robots - autonomy, robustness, safety"
- Contains a robot with articulated joints and a mathematical representation of its position (px, py, pz).
- Equations describe the robot's position based on joint angles (θ1, θ2, θ3) and lengths (a1, a2, a3).
- **Mathematical Equations**:
- Position equations for the robot:
- \( p_x = \cos(\theta_1) \cdot (a_3 \cdot \cos(\theta_2 + \theta_3) + a_2 \cdot \cos(\theta_2)) \)
- \( p_y = \sin(\theta_1) \cdot (a_3 \cdot \cos(\theta_2 + \theta_3) + a_2 \cdot \cos(\theta_2)) \)
- \( p_z = a_3 \cdot \sin(\theta_2 + \theta_3) + a_2 \cdot \sin(\theta_2) + a_1 \)
### Detailed Analysis
- **Section 1**:
- The monkey and brain images represent biological systems with distributed and plastic representations.
- The arrows suggest that these biological mechanisms are modeled to improve robotic performance.
- **Section 2**:
- The robot's position is calculated using trigonometric functions based on joint angles and lengths.
- The equations imply a complex, multimodal representation of the robot's body, aligning with the distributed and plastic biological models.
### Key Observations
- The diagram emphasizes the importance of modeling biological systems with distributed and plastic representations to enhance robotic performance.
- The mathematical equations for the robot's position highlight the complexity and multimodal nature of robotic body representations.
- The use of both implicit and explicit representations (biological and mathematical) suggests a hybrid approach to improving robot autonomy, robustness, and safety.
### Interpretation
The diagram demonstrates that by modeling biological body representations with distributed and plastic characteristics, robots can achieve better performance in terms of autonomy, robustness, and safety. The mathematical equations for the robot's position indicate that a multimodal approach, combining implicit and explicit representations, is crucial for accurate and reliable robotic control. This suggests that understanding and replicating the complexity of biological systems can lead to significant advancements in robotics.
</details>
Credit: Monkey photo source: Einar Fredriksen/ Flickr/ Attribution- ShareAlike 4.0 International (CC BY- SA 4.0)
Credit: Brain image source: Hugh Guiney/ Attribution- ShareAlike 3.0 Unported (CC BY- SA 3.0)
Credit: Line drawing and equations source: Reproduced with the permission of Dr. Hugh Jack from http:// www.engineeronadisk.com
Credit: iCub Robot source: © iCub Facility- IIT, 2017
A typical example of a traditional robot and its mathematical model is depicted in the upper right of Figure 45.3. The robot is an arm consisting of three segments with three joints between the base and the final part- the end- effector. Its model is below the robot- the forward kinematics equations that relate configuration of the robot (joint positions θ 1 , θ 2, θ 3 ) to the Cartesian position of the end- effector (p x , p y , p z ). The model has the following characteristics: (1) it is explicit- there is a one- to- one correspondence between its body and the model (a 1 in the model is the length of the first arm segment, for example); (2) it is unimodalthe equations directly describe physical reality; one sensory modality (proprioceptionjoint angle values) is needed to get the correct mapping in the current robot state; (3) it is centralized- there is only one model that describes the whole robot; (4) it is fixed- normally, this mapping is set and does not change during the robot operation. Other models/ mappings are typically needed for robot operation, such as inverse kinematics, differential kinematics, or models of dynamics (dealing with forces and torques), but they would all share the abovementioned characteristics (see Hoffmann et al. 2010 for a survey).
As pointed out earlier, animals and humans have different bodies than robots; they also have very different ways of representing them in their brains. The panel in the lower left shows the rhesus macaque and below some of the key areas of its brain that deal with body representations (see, e.g., Graziano and Botvinick 2002). There is ample evidence that these representations differ widely from the ones traditionally used in robotics- namely, 'the body in the brain' would be (1) implicitly represented- there would hardly be a 'place' or
a 'circuit' encoding, say, the length of a forearm; such information is most likely only indirectly available and possibly in relation to other variables; (2) multimodal- drawing mainly from somatosensory (tactile and proprioceptive) and visual, but also vestibular (inertial) and closely coupled to motor information; (3) distributed- there are numerous distinct, but partially overlapping and interacting representations that are dynamically recruited depending on context and task; (4) plastic- adapting over both long (ontogenesis) and short time scales, as adaptation to tool use (e.g., Iriki et al. 1996) or various body illusions testify (e.g., humans start feeling ownership over a rubber hand after minutes of synchronous tactile stimulations of the hand replica and their real hand under a table; Botvinick and Cohen 1998).
The iCub robot 'walking' from the top right to the bottom left in the figure is illustrating two things. First, in order to be able to model the mechanisms of biological body representations, the traditional robotic models are of little use- a radically different approach needs to be taken. Second, by making the robot models more brain- like, we hope to inherit some of the desirable properties typical of how humans and animals master their highly complex bodies. Autonomy and robustness or resilience are one such case. It is not realistic to think that conditions, including the body, will stay constant over time and a model given to the robot by the manufacturer will always work. Inaccuracies will creep in due to wear and tear and possibly even more dramatic changes can occur (e.g., a joint becomes blocked). Humans and animals display a remarkable capacity for dealing with such changes: their models dynamically adapt to muscle fatigue, for example, or temporarily incorporate objects like tools after working with them, or reallocate 'brain territory' to different body parts in case of amputation of a limb. Robots thus also need to perform continuous self- modeling (Bongard et al. 2006) in order to cope with such changes. Finally, unlike factory robots that blindly execute their trajectories and thus need to operate in cages, humans and animals use multimodal information to extend the representation of their bodies to the space immediately surrounding them (also called peripersonal space). They construct a 'margin of safety, ' a virtual 'bubble' around their bodies that allows them to respond to potential threats such as looming objects, warranting safety for them and also their surroundings (e.g., Graziano and Cooke 2006). This is highly desirable in robots as well, and can transform them from dangerous machines to collaborators possessing whole- body awareness like we do. First steps along these lines in the iCub were presented by Roncone et al. (2016).
growing area of service robotics, where robots perform tasks in human environments. Rather than accomplishing them autonomously, they often do it in cooperation with humans, which constitutes a big trend in the field. In cooperative tasks, it is of course crucial that the robots understand the common goals and the intentions of the humans in order to be successful. In other words, they require substantial cognitive skills. We have barely started exploiting the vast potential of these types of cognitive machines.
## Conclusion
Our analysis so far has demonstrated that robots fit squarely into the embodied and pragmatic (action- oriented) turn in cognitive sciences (e.g., Engel et al. 2013), which
implies that whole behaving systems rather than passive subjects in brain scanners need to be studied. Robots provide the necessary grounding to computational models of the brain by incorporating the indispensable brain- body-environment coupling (Pezzulo et al. 2011). The advantage of synthetic methodology, or 'understanding by building' (Pfeifer and Bongard 2007), is that one learns a lot in the process of building the robot and instantiating the behavior of interest. The theory one wants to test thus automatically becomes explicit, detailed, and complete. Robots become virtual experimental laboratories retaining all the virtues of 'theories expressed as simulations' (Cangelosi and Parisi 2002), but bring the additional advantage that there is no 'reality gap': there is real physics and real sensory stimulation, which lends more credibility to the analysis if embodiment is at center stage.
We are convinced that robots are the right tools to help us understand the embodied, embedded, and extended nature of cognition because their makeup- physical artifacts with sensors and actuators interacting with their environment- automatically warrants the necessary ingredients. It seems that they are particularly suited for investigations of cognition from bottom up (Pfeifer et al. 2014), where development under particular constraints in brain-body-environment coupling is crucial (e.g., Thelen and Smith 1994). It also becomes possible to simulate conditions that one would not be able to test in humans or animals- think of the simulation of fetal ontogenesis while manipulating the distribution of tactile receptors (Mori and Kuniyoshi 2010). Furthermore, many additional variables (such as internal states of the robot) become easily accessible and lend themselves to quantitative analysis, such as using methods from information theory. Therefore, the combination of a robot with sensorimotor capacities akin to humans, the possibility of emulating the robot's growth and development, and finally the ease of access to all internal variables that can be subject to rigorous quantitative investigations create a very powerful tool to help us understand cognition.
We want to close with some thoughts on whether it is possible to realize- next to embodied, embedded, and extended- enactive robots as well. Most researchers in embodied AI/ cognitive robotics automatically adopt the perspective of extended functionalism (Clark 2008; Wheeler 2011), whereby the boundaries of cognitive systems can be extended beyond the agent's brain and even skin- including the body and environment. However, it has been pointed out by the proponents of enactive cognitive science (Di Paolo 2010; Froese and Ziemke 2009) that in order to fully understand cognition in its entirety, embedding the agent in a closed- loop sensorimotor interaction with the environment is necessary, yet may not be sufficient in order to induce important properties of biological agents such as intentional agency. In other words, one should not only study instances of individual closed sensorimotor loops as models of biological agents- that would be the recommendation of Webb (2009)- but one should also try to endow the models (robots in this case) with similar properties and constraints that biological organisms are facing. In particular, it has been argued that life and cognition are tightly interconnected (Maturana 1980; Thompson 2007), and a particular organization of living systems- which can be characterized by autopoiesis (Maturana 1980) or metabolism, for example- is crucial for the agent to truly acquire meaning in its interactions with the world. While these requirements are very hard to satisfy with the artificial systems of
today, Di Paolo (2010) proposes a way out: robots need not metabolize, but they should be subject to so- called precarious conditions. That is, the success of a particular instantiation of sensorimotor loops or neural vehicles in the agent is to be measured against some viability criterion that is intrinsic to the organization of the agent (e.g., loss of battery charge, overheating leading to electronic board problems resulting in loss of mobility, etc.). The control structure may develop over time, but the viability constraint needs to be satisfied, otherwise the agent 'dies' (McFarland and Boesser 1993). In a similar vein, in order to move from embodied to enactive AI, Froese and Ziemke (2009) propose to extend the design principles for autonomous agents of Pfeifer and Scheier (2001), requiring the agents to generate their own systemic identity and regulate their sensorimotor interaction with the environment in relation to a viability constraint. The unfortunate implication, however, is that research along these lines will in the short term most likely not produce useful artifacts. On the other hand, this approach may eventually give rise to truly autonomous robots with unimaginable application potential.
## Acknowledgments
M.H. was supported by a Marie Curie Intra European Fellowship (iCub Body Schema 625727) within the 7th European Community Framework Programme and the Czech Science Foundation under Project GA17- 15697Y.
## References
- Beer, R.D. and Williams, P .L. (2015). Information processing and dynamics in minimally cognitive agents. Cognitive Science , 39, 1- 38.
- Bernhardt, J. (1987). Sensory capabilities of the fetus. MCN: The American Journal of Maternal/ Child Nursing , 12(1), 44- 7.
- Blickhan, R., Seyfarth, A., Geyer, H., Grimmer, S., Wagner, H., and Günther, M. et al. (2007). Intelligence by mechanics. Philosophical transactions. Series A , 365, 199- 220.
- Bongard, J., Zykov, V ., and Lipson, H. (2006). Resilient machines through continuous selfmodeling. Science , 314, 1118- 21.
- Botvinick, M. and Cohen, J. (1998). Rubber hands 'feel' touch that eyes see. Nature , 391(6669), 756.
- Braitenberg, V. (1986). Vehicles- experiments in synthetic psychology . Cambridge, MA: MIT Press.
- Brooks, R. (1986). A robust layered control system for a mobile robot. IEEE Journal of Robotics and Automation , 2(1), 14- 23.
- Brooks, R.A. (1989). A robot that walks: emergent behaviors from a carefully evolved network. Neural Computation , 1, 153- 62.
- Brooks, R.A. (1991a). Intelligence without reason. In: J. Myopoulos (ed.), Proceedings of the Twelfth International Joint Conference on Artificial Intelligence (vol. 1). San Francisco, USA: Morgan Kaufmann, pp. 569-95.
- Brooks, R.A. (1991b). Intelligence without representation. Artificial Intelligence , 47, 139- 59.
- Bührmann, T., Di Paolo, E., and Barandiaran, X. (2013). A dynamical systems account of sensorimotor contingencies. Frontiers in Psychology , 4, 285.
- Cangelosi, A. and Parisi, D. (2002). Computer simulation: a new scientific approach to the study of language evolution. In: Simulating the evolution of language . London: Springer Science & Business Media, pp. 3- 28.
- Clark, A. (2008). Supersizing the mind: embodiment, action, and cognitive extension . New York: Oxford University Press.
- Clark, A. and Grush, R. (1999). Towards cognitive robotics. Adaptive Behaviour , 7(1), 5- 16.
- Collins, S., Ruina, A., Tedrake, R., and Wisse, M. (2005). Efficient bipedal robots based on passive dynamic walkers. Science , 307, 1082- 5.
- Dennett, D. (1995). Darwin's dangerous idea . New York: Simon & Schuster.
- Di Paolo, E. (2010). Robotics inspired in the organism. Intellectica , 53- 54, 129- 62.
- Engel, A.K., Maye, A., Kurthen, M., and König, P . (2013). Where's the action? The pragmatic turn in cognitive science. Trends in Cognitive Sciences , 17(5), 202- 9.
- Floreano, D., Pericet- Camara, R., Viollet, S., Ruffier, F., Brückner, A., Leitel, R. et al. (2013). Miniature curved artificial compound eyes. Proceedings of the National Academy of Sciences , 110(23), 9267- 72.
- Fodor, J. (1975). The language of thought . Cambridge, MA: Harvard University Press.
- Franceschini, N., Pichon, J., and Blanes, C. (1992). From insect vision to robot vision. Philosophical transactions of the Royal Society of London. Series B , Biological sciences, 337, 283- 94.
- Froese, T. and Ziemke, T. (2009). Enactive artificial intelligence: investigating the systemic organization of life and mind. Artificial Intelligence , 173(3), 466- 500.
- Garofalo, M., Nieus, T., Massobrio, P ., and Martinoia, S. (2009). Evaluation of the performance of information theory- based methods and cross- correlation to estimate the functional connectivity in cortical networks. PLoS ONE , 4(8), e6482.
- Graziano, M. and Botvinick, M. (2002). How the brain represents the body: insights from neurophysiology and psychology. In: W . Prinz and B. Hommel (eds.), Common mechanisms in perception and action: attention and performance . New York: Oxford University Press, 136- 57.
- Graziano, M. and Cooke, D. (2006). Parieto- frontal interactions, personal space, and defensive behavior. Neuropsychologia , 44(6), 845- 59.
- Grush, R. (2004). The emulation theory of representation- motor control, imagery, and perception. Behavioral and Brain Sciences, 27, 377- 442.
- Haugeland, J. (1985). Artificial intelligence: the very idea . Cambridge, MA: MIT Press.
- Hoffmann, M., Marques, H., Arieta, A., Sumioka, H., Lungarella, M., and Pfeifer, R. (2010). Body schema in robotics: a review. IEEE Transactions on Autonomous Mental Development , 2(4), 304- 24.
- Hoffmann, M. and Pfeifer, R. (2011). The implications of embodiment for behavior and cognition: animal and robotic case studies. In: W . Tschacher and C. Bergomi (eds.), The implications of embodiment: cognition and communication . Exeter: Imprint Academic, pp. 31- 58.
- Hoffmann, M., Schmidt, N.M., Pfeifer, R., Engel, A.K., and Maye, A. (2012). Using sensorimotor contingencies for terrain discrimination and adaptive walking behavior in the quadruped robot Puppy . In: T. Ziemke, C. Balkenius, and J. Hallam (eds.), From animals to animats 12 . SAB 2012. Lecture Notes in Computer Science (vol. 7426). Berlin, Heidelberg: Springer, pp. 54- 64.
- Hoffmann, M., Stepanova, K., and Reinstein, M. (2014). The effect of motor action and different sensory modalities on terrain classification in a quadruped robot running with multiple gaits. Robotics and Autonomous Systems , 62(12), 1790- 8.
- Iriki, A., Tanaka, M., and Iwamura, Y. (1996). Coding of modified body schema during tool use by macaque postcentral neurones. Neuroreport , 7 , 2325- 30.
- Jeannerod, M. (2001). Neural simulation of action: a unifying mechanism for motor cognition. NeuroImage , 14, 103- 9.
- Koditschek, D.E., Full, R.J., and Buehler, M. (2004). Mechanical aspects of legged locomotion control. Arthropod Structure and Development , 33, 251- 72.
- Lichtensteiger, L. (2004). On the interdependence of morphology and control for intelligent behav ior [PhD dissertation]. Zurich: University of Zurich.
- Lungarella, M. and Sporns, O. (2006). Mapping information flow in sensorimotor networks. PLoS Computational Biology , 2, 1301- 12.
- Maiolino, P ., Maggiali, M., Cannata, G., Metta, G., and Natale, L. (2013). A flexible and robust large scale capacitive tactile system for robots. Sensors Journal, IEEE , 13(10), 3910- 7.
- Maturana, H.a.V.F. (1980). Autopoiesis and cognition: the realization of the living . Dordrecht: D. Reidel Publishing.
- Maye, A. and Engel, A.K. (2012). Time scales of sensorimotor contingencies. In: H. Zhang, A. Hussain, D. Liu, and Z. Wang (eds.), Advances in brain inspired cognitive systems . BICS 2012. Lecture Notes in Computer Science (vol. 7366). Berlin, Heidelberg: Springer, 240- 9.
- McGeer, T. (1990). Passive dynamic walking. The International Journal of Robotics Research , 9(2), 62- 82.
- Metta, G., Natale, L., Noei, F., Sandini, G., Vernon, D., Fadiga L. et al. (2010). The iCub humanoid robot: an open- systems platform for research in cognitive development. Neural Networks , 23(8- 9), 1125- 34.
- Mori, H., Akutsu, D., and Asada, M. (2015). Fetusoid35: a robot research platform for neural development of both fetuses and preterm infants and for developmental care. In: A. Duff, N.F. Lepora, A. Mura, T.J. Prescott, and P .F.M.J. Verschure (eds.), Biomimetic and biohybrid systems . Living Machines 2014. Lecture Notes in Computer Science (vol. 8608). New York: Springer International Publishing, pp. 411- 13.
- Mori, H. and Kuniyoshi, Y. (2010). A human fetus development simulation: self- organization of behaviors through tactile sensation. In: 2010 IEEE 9th International Conference on Development and Learning . doi:10.1109/ DEVLRN.2010.5578860
- Nakanishi, Y., Asano, Y., Kozuki, T., Mizoguchi, H., Motegi, Y., Osada, M. et al. (2012). Design concept of detail musculoskeletal humanoid 'Kenshiro'- toward a real human body musculoskeletal simulator. In: 2012 12th IEEE- RAS International Conference on Humanoid Robots (Humanoids) . doi:10.1109/HUMANOIDS.2012.6651491
- Olsson, L., Nehaniv, C.L., and Polani, D. (2004). Sensory channel grouping and structure from uninterpreted sensory data. In: Proceedings. 2004 NASA/ DoD Conference on Evolvable Hardware , 2004 . doi:10.1109/ EH.2004.1310825
- O'Regan, J.K. and Noë, A. (2001). A sensorimotor account of vision and visual consciousness. Behavioral and Brain Sciences , 24, 939- 1031.
- Pezzulo, G., Barsalou, L.W ., Cangelosi, A., Fischer, M.H., McRae, K., and Spivey, M.J. (2011). The mechanics of embodiment: a dialog on embodiment and computational modeling. Frontiers in Psychology , 2, 5.
- Pfeifer, R. and Bongard, J.C. (2007). How the body shapes the way we think: a new view of intelligence . Cambridge, MA: MIT Press.
- Pfeifer, R., Iida, F., and Lungarella, M. (2014). Cognition from the bottom up: on biological inspiration, body morphology, and soft materials. Trends in Congnitive Sciences , 18(8), 404- 13. Pfeifer, R. and Scheier, C. (2001). Understanding intelligence . Cambridge, MA: MIT Press.
- Pylyshyn, Z. (1984). Computation and cognition: toward a foundation for cognitive science . Cambridge, MA: MIT Press.
- Quiroga, R.Q., and Panzeri, S. (2009). Extracting information from neuronal populations: information theory and decoding approaches. Nature Reviews Neuroscience , 10(3), 173- 85.
- Richter, C., Jentzsch, S., Hostettler, R., Garrido, J.A., Ros, E., Knoll, A. et al. (2016). Musculoskeletal robots: scalability in neural control. IEEE Robotics & Automation Magazine, 23(4), 128-37. doi:10.1109/ MRA.2016.2535081
- Rochat, P . (1998). Self- perception and action in infancy. Experimental Brain Research , 123, 102- 9.
- Roncone, A., Hoffmann, M., Pattacini, U., Fadiga, L., and Metta, G. (2016). Peripersonal space and margin of safety around the body: learning tactile- visual associations in a humanoid robot with artificial skin. PLoS ONE , 11(10), e0163713.
- Roncone, A., Hoffmann, M., Pattacini, U., and Metta, G. (2014). Automatic kinematic chain calibration using artificial skin: self- touch in the iCub humanoid robot. In: 2014 IEEE International Conference on Robotics and Automation (ICRA) . doi:10.1109/ ICRA.2014.6907178
- Rosenthal- von der Pütten, A.M., Marieke, A., and Weiss, A. (2014). The uncanny in the wild: analysis of unscripted human- android interaction in the field. International Journal of Social Robotics , 6(1), 67- 83.
- Saranli, U., Buehler, M., and Koditschek, D. (2001). RHex: a simple and highly mobile hexapod robot. The International Journal of Robotics Research , 20, 616- 31.
- Schatz, T. and Oudeyer, P .Y. (2009). Learning motor dependent Crutchfield's information distance to anticipate changes in the topology of sensory body maps. 2009 IEEE 8th International Conference on Development and Learning . doi:10.1109/ DEVLRN.2009.5175526
- Schmidt, N., Hoffmann, M., Nakajima, K., and Pfeifer, R. (2013). Bootstrapping perception using information theory: case studies in a quadruped robot running on different grounds. Advances in Complex Systems , 16(2- 3), 1250078.
- Song, Y.M. et al. (2013). Digital cameras with designs inspired by the arthropod eye. Nature , 497(7447), 95- 9.
- Thelen, E. and Smith, L. (1994). A dynamic systems approach to the development of cognition and action . Cambridge, MA: MIT Press.
- Thompson, E. (2007). Mind in life: biology, phenomenology, and the sciences of mind . Cambridge, MA: MIT Press.
- Walter, G.W. (1953). The living brain . New York: Norton & Co.
- Webb, B. (2004). Neural mechanisms for prediction: do insects have forward models? Trends in Neurosciences , 27(5), 278- 82.
- Webb, B. (2009). Animals versus animats: or why not model the real iguana? Adaptive Behavior , 17 , 269- 86.
- Wheeler, M. (2011). Embodied cogntion and the extended mind. In: J. Garvey (ed.), The Continuum companion to philosophy of mind . London: Continuum, pp. 220- 36.
- Yamada, Y., Kanazawa, H., Iwasaki, S., Tsukahara, Y., Iwata, O., Yamada, S. et al. (2016). An embodied brain model of the human foetus. Scientific Reports, 6. doi:10.1038/srep27893