## Streaming Computations with Region-Based State on SIMD Architectures
Stephen Timcheck and Jeremy Buhler
Washington University in St. Louis One Brookings Dr., St. Louis, MO 63130, USA { stimcheck,jbuhler } @wustl.edu
Abstract. Streaming computations on massive data sets are an attractive candidate for parallelization, particularly when they exhibit independence (and hence data parallelism) between items in the stream. However, some streaming computations are stateful, which disrupts independence and can limit parallelism. In this work, we consider how to extract data parallelism from streaming computations with a common, limited form of statefulness. The stream is assumed to be divided into variably-sized regions , and items in the same region are processed in a common context of state. In general, the computation to be performed on a stream is also irregular , with each item potentially undergoing different, data-dependent processing.
This work describes mechanisms to implement such computations efficiently on a SIMD-parallel architecture such as a GPU. We first develop a low-level protocol by which a data stream can be augmented with control signals that are delivered to each stage of a computation at precise points in the stream. We then describe an abstraction, enumeration and aggregation , by which an application developer can specify the behavior of a streaming application with region-based state. Finally, we study an implementation of our ideas as part of the MERCATOR system [5] for irregular streaming computations on GPUs, investigating how the frequency of region boundaries in a stream impacts SIMD occupancy and hence application performance. 1
Keywords: signal · control message · SIMD · irregular · streaming
## 1 Introduction
Streaming computations are integral to high-impact applications such as biological sequence analysis [1], astrophysics [13], and decision cascades in machine learning [14]. These computations operate on a long stream of data items, each of which must be processed through a pipeline of computational stages. When items can be processed independently and identically, extracting data parallelism is straightforward, particularly on SIMD-parallel architectures such as GPUs.
1 Presented at 13th Int'l Wkshp. on Programmability and Architectures for Heterogeneous Multicores, Bologna, Italy, Jan 2020 . Copyright c © 2020 by Stephen Timcheck and Jeremy Buhler. All rights reserved.
A greater challenge lies in supporting streaming computations whose behavior deviates from the above ideal. Deviations can occur in two ways. First, items may not be processed identically; in particular, some stages of the pipeline may produce a variable, data-dependent amount of output for each input item. Such computations - which include all the examples cited above as well as applications in, e.g., particle simulation [2] and network packet processing [10] are said to exhibit irregular data flow, which complicates the lock-step execution model of a SIMD-parallel processor. Our prior work on the MERCATOR system [5] describes a way to support such irregular computations on GPUs.
A second deviation, which is the subject of the present work, arises when items in a stream cannot be processed independently; that is, the computation is stateful. To avoid the need for full serialization, we focus on a common scenario in which the input stream is divided into variably-sized regions . Items in one region are processed independently of each other but in a common context. For example, a stream of characters may be grouped into lines or network packets; a stream of edges in a graph may be grouped by their source vertex; or a stream of measurements may be grouped by a common time window or event trigger. Region boundaries are state-change events for the stream - items after a boundary must be processed differently than items before it.
In this work, we investigate mechanisms to support streaming computations with region-based contextual state on SIMD-parallel platforms. Our contributions are threefold. First, we describe a low-level mechanism for precise delivery of control signals between pipeline stages of a streaming application. This mechanism, unlike those described in some prior work (e.g. [12]), supports irregular dataflow. Second, we use this mechanism to construct an abstraction, enumeration and aggregation , that lets application developers express region-based contextual state as part of a streaming application. Finally, we implement our designs in MERCATOR to investigate the performance implications of regional context, exposing a SIMD-specific performance tradeoff between alternate ways of implementing this behavior in applications. The two strategies we examine trade off between SIMD occupancy and representation overhead.
The remainder of this paper is organized as follows. Section 2 describes the application and architectural models in which we formulate our work and considers related work in other streaming models. Section 3 describes our protocol for synchronizing control signals with a data stream. Section 4 describes the developer-facing abstraction of enumeration and aggregation, which we implement in terms of signals. Section 5 investigates the performance of our designs, while Section 6 concludes and considers future work.
## 2 Background and Related Work
## 2.1 Application Model
A streaming application consists of a pipeline of compute nodes connected by fixed-sized data queues . A node consumes a stream of data items from its input
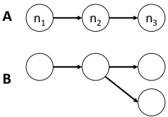
queue and produces a stream of data items (perhaps of a different type) at its output that are queued for processing by the next node downstream in the pipeline. When a node is executed to consume one or more inputs, we say that the node fires . Each input data item consumed by a node causes it to produce zero or more outputs. The number of outputs may vary for each input consumed, up to some node-dependent maximum, and is not known prior to execution. Figure 1a shows a simple application pipeline with three nodes. While we mainly discuss linear pipelines in this work, our contributions also apply to tree-structured topologies like those in Figure 1b.
Fig. 1. (a) Streaming computation pipeline with three compute nodes; (b) Pipeline with a tree topology.
<details>
<summary>Image 1 Details</summary>
### Visual Description
## Diagram: Simple Directed Graphs
### Overview
The image presents two simple directed graphs, labeled A and B. Each graph consists of nodes (represented as circles) connected by directed edges (arrows). Graph A is a linear chain of three nodes, while Graph B shows a branching structure.
### Components/Axes
* **Nodes:** Represented by circles. In graph A, the nodes are labeled n1, n2, and n3. Graph B has unlabeled nodes.
* **Edges:** Represented by arrows, indicating the direction of the relationship between nodes.
* **Labels:** "A" and "B" are labels identifying the two graphs.
### Detailed Analysis or ### Content Details
* **Graph A:**
* Nodes: n1, n2, n3
* Edges: n1 -> n2, n2 -> n3
* Trend: A simple linear sequence.
* **Graph B:**
* Nodes: Three unlabeled nodes.
* Edges: Node1 -> Node2, Node2 -> Node3, Node2 -> Node4
* Trend: A branching structure where one node has two outgoing edges.
### Key Observations
* Graph A represents a simple linear progression.
* Graph B represents a branching or diverging relationship.
* The nodes in Graph B are not labeled, unlike Graph A.
### Interpretation
The diagram illustrates two fundamental types of directed graphs: a linear sequence and a branching structure. These structures are commonly used to represent processes, relationships, or dependencies in various fields, such as computer science, biology, and social sciences. The presence of labels in Graph A suggests a specific order or identity for the nodes, while the absence of labels in Graph B implies a more general or abstract relationship.
</details>
We do not consider DAG-structured topologies because the semantics associated with convergent edges are complex under irregular dataflow, even in the absence of stateful execution [9]. Topologies with cycles have clearer streaming semantics, but in the presence of irregularity, items in the stream can be reordered if they take different numbers of trips around a cycle. For such topologies, Maintaining precisely ordered control boundaries in the stream requires aggressive reordering that is beyond the scope of this work.
An application is provided with an initial stream of inputs to its source node . When the application executes, a global scheduler repeatedly chooses a node with one or more pending inputs to fire. Because of our architectural mapping below, we assume that only one node fires at a time and that a node cannot be preempted while firing. The scheduler continues to select and fire nodes until no node has any inputs remaining.
A signal is a control message generated by a node for consumption by its downstream neighbor. When a node receives a signal it can change its state and may also generate additional signals to the next node downstream. Signals must be delivered precisely with respect to the stream of data items. Formally, suppose we have two successive nodes n 1 and n 2 in a pipeline. If n 1 emits a data item d , followed by a signal s , followed by another data item d ′ , then n 2 must receive s after processing d but before processing d ′ .
## 2.2 Target Architecture and Mapping
Our work targets wide-SIMD multiprocessors. While many general-purpose processors support SIMD instructions, we realize our designs on NVIDIA GPUs due to their robust CUDA tool chain and their popularity as accelerators.
A GPU may be viewed as a collection of SIMD processors sharing a common memory. Each processor has a fixed SIMD width w , which is the number of concurrent SIMD lanes that it can execute 2 . SIMD lanes execute computations
2 We treat the CUDA block size as the effective SIMD width, ignoring CUDA's virtualization of an underlying, smaller width (the warp size).
in lock-step; hence, divergent behavior such as nonuniform branches, or lack of inputs to some SIMD lanes, causes some lanes to sit idle while others execute.
Mapping a streaming computational pipeline onto a GPU entails moving the input stream from the host system to the GPU's memory, executing a GPU kernel to process the data through the pipeline, and finally transferring the output stream back to the host. Our work focuses on efficient processing on the GPU, rather than the orthogonal task of host/GPU data transfer.
GPU runtimes offer little support for interprocessor synchronization other than via control transfer back to the host. To avoid excessive host-device control overhead, we therefore instantiate the pipeline separately on each processor of the GPU, then let all processors' pipelines compete to consume data from a common input stream. This approach requires atomic operations but no locking. The GPU kernel does not return control to the host until the entire stream is consumed. Each processor on the GPU independently implements the sequential, non-preemptively scheduled computation described above. However, a node now consumes not a single input per firing but rather a variably-sized ensemble of inputs, up to the processor's SIMD width, which are processed in parallel.
Our performance goal is to maximize throughput, or equivalently to minimize time for the GPU to process an entire input stream. A secondary goal that promotes high throughput is to maximize SIMD occupancy , the fraction of SIMD lanes doing useful work at any step of the computation. In particular, we want the sizes of ensembles presented to each node to achieve the full SIMD width. However, we will show that region-based state can be in tension with the goal of maximizing SIMD occupancy, creating a challenge for performance optimization.
## 2.3 Related work
Several systems and languages have been developed to express streaming dataflow computations. One of the most influential such systems is StreamIt [11], which implements the synchronous data flow (SDF) abstraction [8]. StreamIt assumes a fixed number of outputs per input to a compute node. This assumption allows StreamIt to offer a powerful abstraction, teleport messaging [12], in which signals can flow both forward and backward in a pipeline. StreamIt can also schedule a signal to be delivered to an arbitrary destination node at some precise future time, rather than forcing the signal to flow through the pipeline.
Many capabilities of teleport messaging rely on the underlying SDF model. In contrast, our model does not assume a fixed number of outputs per input and so requires a different design to ensure precise signaling. Our work therefore extends precise signaling capabilities from regular to irregular streaming applications. Like StreamIt, we choose to send signals 'out of band,' in our case via parallel control edges, rather than attempt to enqueue them together with data items.
Other streaming systems, such as Ptolemy [6] and Auto-Pipe [4], support a variety of dataflow semantics, including multiple, differently-typed dataflow edges between a pair of nodes. This support is in principle sufficient to implement a control channel for signals. However, except in restricted cases like SDF, the
systems do not specify how multiple channels between the same two nodes are synchronized and so do not by themselves support precise signaling.
Our work is influenced by a control messaging protocol developed by Li et al. [9]. That work, however, incurs additional complexity to support asynchronous streaming dataflow and to impose well-defined semantics on convergent dataflow edges in an DAG-structured irregular application. We preserve their idea of a credit protocol for synchronizing data and control streams but realize this idea in a way that is efficient for our target model and architecture.
The idea of processing part of a stream of items in a common context is similar to facilities present in Apache Spark [16]. Spark streams consist of a sequence of RDDs [15], which are discrete data sets, processed as a unit, that may contain multiple elements. Our abstraction supports some operations semantically similar to Spark's but realizes them in the context of a single wide-SIMD processor rather than the multicore and distributed systems that Spark targets.
Other frameworks supporting streaming-like behavior, such as CnC-CUDA [7], utilize an 'in-band' approach with control collections that mix control and data into a single stream. Control collections are analogous to our regions of items with a common context. Their implementation requires a tag for each item to track the region associated with it. In contrast, our implementation keeps region boundaries synchronized with the data stream without the need for tagging. We compare these two approaches in Section 5.
## 3 A Mechanism for Precise Signaling
In this section, we describe how to synchronize data and control signals between two successive nodes in a streaming pipeline. The mechanism bears some similarities to control flow in networking. We state the correctness properties of our design but relegate their proofs to the appendix.
## 3.1 Credit Protocol for Synchronizing Signals
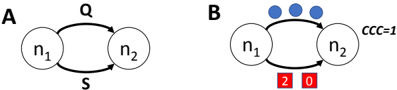
Let n 1 and n 2 be successive nodes in a pipeline, connected by data queue Q . We add a separate, finite-sized signal queue S between the nodes, as in Figure 2a. Data items are moved from n 1 to n 2 on Q , while signals are moved on S .
We must ensure that, although data and signals move on separate queues, their movement is synchronized so as to ensure precise signal delivery. For this purpose, we introduce a credit protocol between n 1 and n 2 . Each signal created by n 1 is assigned an non-negative integer amount of credit , which is transmitted along with the signal on S . Credit records a number of data items that n 2 must process before it can receive the signal.
When n 1 emits a signal s , it uses two rules to set the credit associated with s . (1) If no signal is currently queued on S , then s gets an amount of credit equal to the number of data items queued on Q . (2) If one or more signals are queued on S , let s ′ be the signal at the tail of S . Then s gets an amount of credit equal to the number of data items emitted by n 1 since s ′ was enqueued. Node
n 1 maintains a counter of emitted data items, which is reset each time it emits a signal, that is used to implement the second rule.
The downstream node n 2 maintains a current credit counter , initially set to 0, that tracks the number of items that can safely be consumed before processing the next signal. Node n 2 uses the following two rules to determine whether to process data or a signal when it fires. (1) If no signal is queued on S , n 2 may freely consume any available data items on Q without regard to the counter. Otherwise (i.e., a signal is queued on S ), (2a) if the current credit counter is non-zero, n 2 may consume only a number of data items less than or equal to the value of this counter, which is decremented once for each data item consumed. (2b) If instead the current credit counter is 0, let s be the signal at the head of queue S . If s carries more than 0 credit, that credit is removed from s and added to the current credit counter. Otherwise, n 2 consumes s .
Figure 2b illustrates how the credit carried in the signals and in the receiving node's credit counter synchronizes the two queues.
Lemma 1. A signal s emitted by n 1 is received by n 2 precisely when n 2 has consumed all data items emitted by n 1 prior to s .
## 3.2 Scheduling Applications with Signals
A firing of a node n proceeds in two phases: a data phase and a signal phase . In the data phase, n consumes as many queued data items as it can. The number of items consumed is limited to the minimum of three values: the number of queued items, the amount of space in n 's downstream queue, and (if a signal is pending for n ) the value of n 's current credit counter. Once n can consume no more data, if its current credit counter is 0, it enters the signal phase, in which it consumes as many queued signals as it can. Signal processing ends when no queued signals remain, or when n 's current credit counter becomes > 0 (and hence data must be consumed prior to the next queued signal).
A node is fireable if it has either data or a signal pending, and if there is sufficient space in its output queue to hold any outputs from the firing. The maximum number of output data items per input item is known a priori for each node, so the scheduler can determine whether at least one data item can
<details>
<summary>Image 2 Details</summary>
### Visual Description
## Diagram: State Transition Diagrams
### Overview
The image presents two state transition diagrams, labeled A and B. Each diagram depicts transitions between two states, represented as circles labeled n1 and n2. Diagram B includes additional annotations indicating counts or values associated with the transitions.
### Components/Axes
**Diagram A:**
* **Nodes:** Two nodes labeled "n1" and "n2".
* **Transitions:** Two directed edges (arrows) connecting n1 and n2.
* One edge from n1 to n2, labeled "Q".
* One edge from n2 to n1, labeled "s".
**Diagram B:**
* **Nodes:** Two nodes labeled "n1" and "n2".
* **Transitions:** Two directed edges (arrows) connecting n1 and n2.
* One edge from n1 to n2.
* One edge from n2 to n1.
* **Annotations:**
* Three blue circles above the edge from n1 to n2.
* Two red squares below the edges, labeled "2" (below the edge from n2 to n1) and "0" (below the edge from n1 to n2).
* Text "CCC = 1" to the right of node n2.
### Detailed Analysis or ### Content Details
**Diagram A:**
* Node n1 transitions to node n2 via transition Q.
* Node n2 transitions to node n1 via transition s.
**Diagram B:**
* Node n1 transitions to node n2, with an implied count of 3 (represented by the three blue circles).
* Node n2 transitions to node n1, with a count of 2 (represented by the red square labeled "2").
* Node n1 transitions to node n2, with a count of 0 (represented by the red square labeled "0").
* The "CCC" value for the diagram is 1.
### Key Observations
* Diagram A represents a basic state transition with symbolic labels for the transitions.
* Diagram B represents a state transition with counts or values associated with the transitions.
* The blue circles and red squares in Diagram B appear to represent different types of counts or values.
### Interpretation
The diagrams illustrate state transitions between two states, n1 and n2. Diagram A provides a basic representation with symbolic labels for the transitions, while Diagram B adds quantitative information in the form of counts or values associated with each transition. The "CCC = 1" annotation in Diagram B likely represents a characteristic or property of the overall transition system. The blue circles and red squares likely represent different types of counts or values associated with the transitions. The values 2 and 0 are associated with the transitions from n2 to n1 and n1 to n2, respectively. The three blue circles above the edge from n1 to n2 likely represent a count of 3 for that transition.
</details>
S
Fig. 2. (a) Two nodes with data and signal queues Q and S between them; (b) A possible state of the signal protocol, showing the credit associated with each signal (lower edge) and the current credit counter (right). n 2 may consume one data item from Q before the first signal, then another two before the second signal.
be consumed given the available space on n 's downstream data queue. The maximum number of signals emitted per data item or signal input is also known a priori , so a similar determination can be made given n 's downstream signal queue. The scheduler repeatedly chooses some fireable node and fires it until no node has queued data or signals remaining.
Lemma 2. Under the given firing/scheduling policy, an application pipeline always finishes execution in finite time and so cannot deadlock.
## 3.3 SIMD Extensions
The above description assumes that nodes process input data items one at a time. However, on a SIMD-parallel processor, a node may process an ensemble of multiple items at once. Because a signal updates the state of the receiving node, we must ensure that items appearing before and after a signal in the stream are not processed in the same input ensemble . Hence, if a signal is queued for a node, the system must limit the size of the node's input ensemble to the value of its current credit counter. This requirement may adversely impact SIMD occupancy if signals occur frequently; we study its impact in Section 5.
## 4 Regional Context via Enumeration and Aggregation
We now describe a developer-facing abstraction, enumeration and aggregation , that allows application developers to describe streaming computations in which regions of a stream must be processed in a common context. We have implemented this abstraction as an extension to our MERCATOR system, building on the work of the previous section.
Our abstraction assumes that regions of a stream with a common context are represented as composite objects , similar to the RDDs of Apache Spark [16]. The actual input provided to the application is a stream of such objects. Each object may contain zero or more elements of a common data type. For example, an object could be a line of text whose elements are characters, or a vertex whose elements are its adjacent edges, or a list whose elements are numbers. Objects may contain different numbers of elements.
At a given point in the application's pipeline, the developer may choose to 'open' the stream of composite objects to create a stream of all their elements. We call this opening process enumeration of the objects. The enumerated element stream becomes the input to the next node in the pipeline. In this and subsequent nodes, the developer may access the parent object that gave rise to an input item to obtain context needed for its processing.
The opposite of enumeration is aggregation , which 'closes' the context associated with a parent object. The developer may choose to emit a stream of results derived from individual elements, stripped of their parent context, or to aggregate values computed from the elements of each parent object (e.g. by summing them) and emit a single result per parent. Either way, the stream of results continues down the pipeline.
## 4.1 Developer Interface
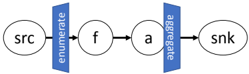
To make these ideas concrete, consider the simple application whose topology is sketched in Figure 3. A stream of objects of type Blob , each containing a collection of numbers, flows from the source node. The Blobs' elements are enumerated, and node f does some computation on each number in the element stream, producing a (possibly shorter) output stream of numbers. These results are passed to node a , which sums the results from each Blob and sends a stream of per-Blob sums to a sink node.
Fig. 3. A pipeline with enumeration and aggregation. The computation enumerates composite objects drawn from an input source, acts on their elements with a filtering node f , aggregates the filtered values in an accumulator node a , and writes the accumulated value from each object to an output sink.
<details>
<summary>Image 3 Details</summary>
### Visual Description
## Diagram: Data Processing Flow
### Overview
The image depicts a data processing flow diagram. It shows a sequence of operations performed on data, starting from a source ("src") and ending at a sink ("snk"). The data passes through intermediate steps labeled "f" and "a", with "enumerate" and "aggregate" operations applied at specific points in the flow.
### Components/Axes
* **Nodes:**
* `src`: Source of the data. Represented as a circle.
* `f`: Intermediate processing step. Represented as a circle.
* `a`: Intermediate processing step. Represented as a circle.
* `snk`: Sink or destination of the data. Represented as a circle.
* **Operations:**
* `enumerate`: Operation applied after the source. Represented as a blue rectangle oriented vertically.
* `aggregate`: Operation applied before the sink. Represented as a blue rectangle oriented vertically.
* **Flow:** The data flow is indicated by arrows connecting the nodes and operations. The flow is from left to right.
### Detailed Analysis
The diagram shows the following sequence of operations:
1. Data originates from the `src` node.
2. The `enumerate` operation is applied to the data.
3. The data is processed by the `f` node.
4. The data is processed by the `a` node.
5. The `aggregate` operation is applied to the data.
6. The data reaches the `snk` node.
### Key Observations
* The diagram illustrates a linear data processing pipeline.
* The `enumerate` and `aggregate` operations are distinct steps in the pipeline.
* The intermediate nodes `f` and `a` represent unspecified processing steps.
### Interpretation
The diagram represents a simplified data processing workflow. The `src` and `snk` nodes represent the beginning and end points of the data's journey, while the intermediate nodes and operations represent transformations or manipulations applied to the data along the way. The `enumerate` operation likely adds an index or identifier to each data element, while the `aggregate` operation likely combines or summarizes data elements. The diagram provides a high-level overview of the data flow, without specifying the details of each processing step.
</details>
The listing of Figure 4 specifies the application's topology. For each node, we specify the types of its input and output streams. The enumerate keyword at the input to node f indicates that Blobs are to be enumerated starting there; subsequent data types in the enumeration region of the pipeline are labeled from Blob , indicating that items are to be processed in the context of their parent Blobs. Aggregation occurs at the output of node a , where the aggregate keyword indicates that a produces (up to) one double value per parent object rather than per element.
Figure 5 shows code to implement the application. For each node, there is a run() function that processes items in the node's input stream. Output from a node is generated via the push() function; because the application is irregular, not every input might produce an output.
The listing shows several functions specific to enumeration and aggregation. findCount() is called once per parent object to determine how many elements it contains. The begin() and end() functions, which may be defined for each node receiving enumerated inputs, are executed before and after the region of the stream associated with each parent object, respectively. The parent object associated with a node's current input is accessible via getParent() .
Enumeration produces a stream of sequential indices of elements in each parent object. However, the application developer is responsible for providing code to extract the elements from an object. This design allows MERCATOR to remain ignorant of how objects are organized internally.
## 4.2 Implementation
The MERCATOR system takes in an application topology, as shown in Figure 4, and produces stubs for all the functions shown in Figure 5. The user then fills in the function bodies with the actual code of the application.
We note that the code shown is CUDA, not C++ ; hence, the run() functions are actually called not with a single input but with a SIMD ensemble of items in multiple threads, which execute the function body in parallel for each item. (The
```
```
Fig. 4. Application topology specification illustrating enumeration and aggregation.
```
```
Fig. 5. Application code, with stubs generated from topology and developer-supplied function bodies.
accumulation in node a would in practice be implemented atomically or with a SIMD-parallel reduction.) MERCATOR provides the runtime infrastructure needed to transfer data from one node to the next and to schedule nodes.
The signaling mechanism of the previous section is key to enabling enumeration and aggregation. At the point of enumeration, the runtime generates a data stream of element indices together with signals indicating the start and end of each parent object's elements. Downstream nodes intercept these signals in order to update their current parent object and to call the begin() and end() stubs at the right times. Because data before and after a signal is never processed in the same SIMD ensemble, operations on different parent objects' elements always happen in separate calls to a node's run() function, and the result of getParent() is the same for all items in an ensemble.
## 5 Results
We implemented both our precise signaling infrastructure and the enumeration and aggregation abstraction as extensions to our MERCATOR framework and studied their performance on several benchmark computations. All experiments were conducted on an NVIDIA GTX 1080Ti GPU (28 processors), using as many active blocks as could fit on the device and a SIMD width of 128 threads per block. Code was compiled using CUDA v10 under Linux. The abstraction penalty of the new features was verified to be negligible in MERCATOR applications that do not use them.
Cost of Regional Context Abstraction To characterize the performance impact of regional context, we began with two simple benchmark computations. Each benchmark operates on a large array of integers in GPU memory, and each divides this array into a series of regions. The computation enumerates each region, sums its elements, and produces a stream of per-region sums. In the first benchmark, the regions are of uniform size; in the second, the size of each region is chosen uniformly at random between 0 and a specified maximum.
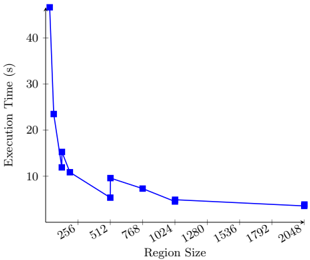
Fig. 6. Execution time vs. region size for sum app with fixed-size regions.
<details>
<summary>Image 4 Details</summary>
### Visual Description
## Chart: Execution Time vs. Region Size
### Overview
The image is a line graph showing the relationship between execution time (in seconds) and region size. The graph shows a steep decline in execution time as the region size increases from 256 to approximately 768, after which the decline becomes more gradual.
### Components/Axes
* **X-axis:** Region Size, with markers at 256, 512, 768, 1024, 1280, 1536, 1792, and 2048.
* **Y-axis:** Execution Time (s), with markers at 10, 20, 30, and 40.
* **Data Series:** A single blue line with square markers representing the execution time for different region sizes.
### Detailed Analysis
The data series (blue line) shows the following approximate values:
* **Region Size 256:** Execution Time ≈ 47 seconds
* **Region Size 256:** Execution Time ≈ 23 seconds
* **Region Size 256:** Execution Time ≈ 15 seconds
* **Region Size 256:** Execution Time ≈ 12 seconds
* **Region Size 512:** Execution Time ≈ 11 seconds
* **Region Size 512:** Execution Time ≈ 5 seconds
* **Region Size 768:** Execution Time ≈ 9 seconds
* **Region Size 1024:** Execution Time ≈ 7 seconds
* **Region Size 1280:** Execution Time ≈ 5 seconds
* **Region Size 2048:** Execution Time ≈ 3 seconds
The line slopes downward, indicating an inverse relationship between region size and execution time.
### Key Observations
* The most significant drop in execution time occurs between region sizes 256 and 768.
* Beyond a region size of 1024, the execution time decreases at a much slower rate.
* There is a slight increase in execution time between region sizes 512 and 768.
### Interpretation
The graph suggests that increasing the region size initially leads to a substantial reduction in execution time. However, the benefits of increasing the region size diminish as the region size becomes larger. The slight increase in execution time between region sizes 512 and 768 could indicate an optimal region size range, beyond which further increases may not be as effective or could even introduce some overhead. The data implies that there are diminishing returns in terms of execution time reduction as the region size increases, and that an optimal region size may exist for minimizing execution time.
</details>
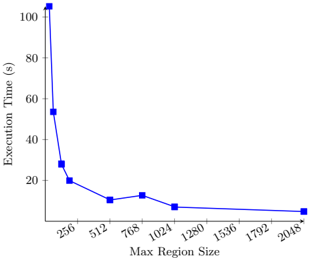
Fig. 7. Execution time vs. max region size for sum app with variable regions.
<details>
<summary>Image 5 Details</summary>
### Visual Description
## Line Chart: Execution Time vs. Max Region Size
### Overview
The image is a line chart showing the relationship between "Execution Time (s)" on the y-axis and "Max Region Size" on the x-axis. The chart illustrates how execution time decreases as the maximum region size increases.
### Components/Axes
* **X-axis:** "Max Region Size" with values at: 256, 512, 768, 1024, 1280, 1536, 1792, 2048.
* **Y-axis:** "Execution Time (s)" with values ranging from 0 to 100.
* **Data Series:** A single blue line with square markers representing the data points.
### Detailed Analysis
The blue line represents the execution time as a function of the maximum region size.
* **Trend:** The line shows a decreasing trend. Initially, the execution time drops sharply as the maximum region size increases from 256 to 512. The rate of decrease slows down as the maximum region size increases further.
* **Data Points:**
* At Max Region Size 256, Execution Time is approximately 54 seconds.
* At Max Region Size 512, Execution Time is approximately 11 seconds.
* At Max Region Size 768, Execution Time is approximately 13 seconds.
* At Max Region Size 1024, Execution Time is approximately 8 seconds.
* At Max Region Size 2048, Execution Time is approximately 5 seconds.
### Key Observations
* The most significant drop in execution time occurs between Max Region Sizes 256 and 512.
* Beyond a Max Region Size of 1024, the execution time decreases at a much slower rate.
### Interpretation
The chart suggests that increasing the maximum region size initially leads to a substantial reduction in execution time. However, the benefits of increasing the maximum region size diminish as the size becomes larger. This implies that there may be an optimal maximum region size beyond which further increases do not significantly improve performance. The initial sharp decline indicates that smaller region sizes result in significantly longer execution times, possibly due to increased overhead or less efficient processing.
</details>
Figures 6 and 7 show the time to process an array of 512 million integers in each benchmark as a function of the region size (fixed in the first figure, maximum in the second). Focusing first on the test with fixed-sized regions, we see that execution time decreases sharply as the region size grows from 32 to the SIMD width of 128, then decreases more gradually for larger sizes. This decrease reflects the lower frequency of region boundary signals relative to the data stream as the region size increases. For region sizes on the order of several hundred of elements or more, the abstraction overhead is small relative to the total cost of execution.
A second phenomenon observable in Figure 6 is that the overhead incurred by region boundaries changes non-monotonically with region size. In particular, overhead is locally minimized for region sizes equal to a multiple of the SIMD width and then jumps sharply for slightly larger sizes. This behavior reflects the impact of region boundaries on SIMD occupancy. Recall that signals prevent elements in two regions from being combined in the same SIMD ensemble, which is required to ensure that each element contributes only to its own region's sum. Region sizes that do not evenly divide the SIMD width therefore require that nodes run with non-full input ensembles at least once per region. This loss of SIMD occupancy appears as reduced application throughput. For region sizes less than the SIMD width, every ensemble becomes non-full, which explains the large performance impacts seen at region sizes below 128.
Figure 7 shows a much-reduced impact of small size variations on throughput. Unlike the previous benchmark, but more typically of real-world irregular applications, the region size is not fixed. The sharp peaks of reduced throughput for worst-case region sizes are therefore smoothed out, but the dominant effect remains: larger region sizes incur less abstraction overhead.
Comparison of Mechanisms for Communicating Context For our second experiment, we implemented a real-world application taken from the DIBS benchmark set [3], a suite of applications representative of data integration workloads. The application, which DIBS calls tstcsv-> csv but we refer to hereafter as 'taxi,'
processes a sequence of lines of text, each of which contains a tag, a variablelength list of GPS locations specified as real-valued coordinate pairs, and other data. The goal is to parse each coordinate pair, swap the elements of the pair, and emit the pair together with the tag corresponding to its source line.
Our initial implementation of the taxi application operates on the raw text in GPU memory. It takes as input a stream of line start indices and line lengths. For each line, the first stage of the application enumerates the line's individual characters as a stream, checks them in parallel, and retains only those character positions (identified by an open-brace character) that likely mark the start of a coordinate pair. The second stage verifies, again in parallel, that each open-brace indeed marks a coordinate pair and, if so, parses the pair's coordinates. Each line's tag is parsed once when the line is first enumerated and is then used to mark each parsed coordinate pair for that line.
The first series of Figure 8 (square points) shows the execution time of the taxi app as a function of its input size. Larger file sizes were obtained by replicating the input file from DIBS multiple times. Mindful of the relationship between abstraction penalty and region size, we then investigated how the input data in the taxi app determined SIMD occupancy. Input lines have an average length of 1397 characters, so regions corresponding to each line in the stage 1 are large, and the penalty to occupancy is expected to be low. In contrast, lines contain on average only 45 coordinate pairs, less than the SIMD width, and so would be expected to incur a large penalty to occupancy in stage 2, whose region size is determined by the number of pairs per line. Indeed, we found that stage 1 was fired with full SIMD ensembles 91% of the time, while stage 2 had full ensembles only 9% of the time.
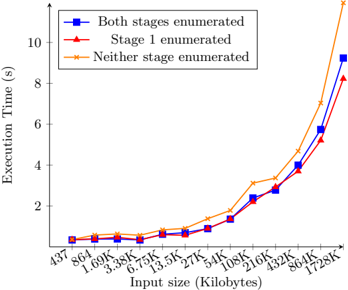
When regional context changes frequently relative to the SIMD width, the occupancy cost to performance of our implementation may exceed the cost (mainly extra memory accesses) of replicating this context along with every data item. We therefore developed a second version of the taxi app that used enumeration to provide context in stage 1 but explicitly marked each open-brace with its line's tag before sending it to stage 2. The latter stage does not utilize the enumeration abstraction and so can process items from multiple lines in one ensemble, achieving essentially full SIMD occupancy. The second series in Figure 8 (triangular points) shows that improved occupancy results in lower total execution time. However, using the same strategy to tag each character of each line in stage 1, while it slightly improves occupancy by avoiding enumeration entirely, incurs substantially more overhead due to the much greater number of elements to be tagged per region. The third series (x points) shows that, at the largest input size tested, a pure tagging implementation is roughly 30% slower than one that judiciously uses either tagging or our design as appropriate for each stage.
We conclude that the best way to provide regional context to streaming applications on a SIMD architecture depends strongly on the performance tradeoff between reduced SIMD occupancy and reduced representation overhead. Each stage of a pipeline may represent a different point in this tradeoff, and the highest-performing implementation (dense or sparse) for regional context may
Fig. 8. Execution time vs input size for three versions of the taxi app.
<details>
<summary>Image 6 Details</summary>
### Visual Description
## Line Chart: Execution Time vs. Input Size
### Overview
The image is a line chart comparing the execution time (in seconds) against the input size (in Kilobytes) for three different scenarios: "Both stages enumerated", "Stage 1 enumerated", and "Neither stage enumerated". The chart shows how execution time increases with input size for each scenario.
### Components/Axes
* **X-axis:** Input size (Kilobytes). The axis markers are: 437, 864, 1.69K, 3.38K, 6.75K, 13.5K, 27K, 54K, 108K, 216K, 432K, 864K, 1728K.
* **Y-axis:** Execution Time (s). The axis markers are: 2, 4, 6, 8, 10.
* **Legend:** Located at the top-left of the chart.
* Blue square: Both stages enumerated
* Red triangle: Stage 1 enumerated
* Orange cross: Neither stage enumerated
### Detailed Analysis
* **Both stages enumerated (Blue Square):** The line starts relatively flat, then begins to increase more rapidly after 216K.
* 437: ~0.3
* 864: ~0.3
* 1.69K: ~0.2
* 3.38K: ~0.2
* 6.75K: ~0.2
* 13.5K: ~0.3
* 27K: ~0.5
* 54K: ~0.9
* 108K: ~1.3
* 216K: ~2.4
* 432K: ~3.2
* 864K: ~5.4
* 1728K: ~9.2
* **Stage 1 enumerated (Red Triangle):** The line follows a similar trend to "Both stages enumerated", but generally has slightly lower execution times.
* 437: ~0.3
* 864: ~0.2
* 1.69K: ~0.1
* 3.38K: ~0.1
* 6.75K: ~0.1
* 13.5K: ~0.2
* 27K: ~0.4
* 54K: ~0.8
* 108K: ~1.2
* 216K: ~2.3
* 432K: ~2.9
* 864K: ~5.1
* 1728K: ~8.2
* **Neither stage enumerated (Orange Cross):** The line also increases with input size, and has the highest execution time at larger input sizes.
* 437: ~0.4
* 864: ~0.4
* 1.69K: ~0.5
* 3.38K: ~0.6
* 6.75K: ~0.7
* 13.5K: ~0.8
* 27K: ~1.0
* 54K: ~1.4
* 108K: ~1.8
* 216K: ~2.5
* 432K: ~3.4
* 864K: ~4.8
* 1728K: ~11.0
### Key Observations
* All three scenarios show an increase in execution time as the input size increases.
* At smaller input sizes (below 216K), the execution times for all three scenarios are relatively close.
* At larger input sizes (above 216K), the execution times diverge, with "Neither stage enumerated" having the highest execution time, followed by "Both stages enumerated", and then "Stage 1 enumerated".
* The increase in execution time is more pronounced for "Neither stage enumerated" at larger input sizes.
### Interpretation
The data suggests that enumerating at least one stage is beneficial for performance, especially as the input size grows. Enumerating both stages provides a slight performance advantage over enumerating only stage 1. Not enumerating any stage results in the worst performance, with a significant increase in execution time as the input size increases. This indicates that enumeration helps optimize the process, reducing the time required to handle larger inputs. The performance difference becomes more significant as the input size increases, highlighting the importance of enumeration for scalability.
</details>
therefore vary between stages. Ultimately, this choice should be made transparently to the application developer based on profile-guided feedback.
## 6 Conclusion and Future Work
We have described an abstraction, enumeration and aggregation, to support stateful streaming computation based on regional contexts. We presented an implementation of this abstraction for irregular streaming computations on SIMDparallel architectures such as GPUs. Our abstraction relies on a sparse implementation of precise signal delivery between computational stages.
We characterized the cost of the abstraction on benchmark computations and demonstrated that the best strategy for realizing it may depend on the relationship between region size and the architecture's SIMD width. Future work will include more careful modeling and/or empirical measurement of the costs of alternative implementations, with an eye toward allowing the MERCATOR runtime to transparently choose between strategies based on the typical number of elements per region.
Another direction for future work will investigate how to lower the abstraction penalty of precise signaling for SIMD occupancy. When the effects of a signal on a node's state are limited and well-defined (e.g. changing the parent object pointer), the node may be able to compute the correct state (pre- or post-signal) to expose to the item in each SIMD lane separately. Computing the correct state per item in each node, rather than storing it with items in the queues between nodes, would offer the same efficient representation of state as in our design while eliminating signals' cost to SIMD occupancy.
## Acknowledgments
This work was supported by NSF CISE awards CNS-1763503 and CNS-1500173.
## References
1. Altschul, S., Gish, W., Miller, W., Myers, E., Lipman, D.: Basic local alignment search tool. J. Molecular Biology 215 (3), 403-10 (1990)
2. Barnes, J., Hut, P.: A hierarchical o(n log n) force-calculation algorithm. Nature 324 (6096), 446 (1986)
3. Cabrera, A.M., Faber, C.J., Cepeda, K., Derber, R., Epstein, C., Zheng, J., Cytron, R.K., Chamberlain, R.D.: DIBS: A data integration benchmark suite. In: 2018 ACM/SPEC Int'l Conf. Performance Engineering. pp. 25-28 (2018)
4. Chamberlain, R., Franklin, M., Tyson, E., Buckley, J., et al.: Auto-Pipe: streaming applications on architecturally diverse systems. Computer 43 (3), 42-49 (2010)
5. Cole, S., Buhler, J.: MERCATOR: A GPGPU framework for irregular streaming applications. In: 2017 Int'l Conf. High Performance Computing and Simulation. pp. 727-36 (2017)
6. Eker, J., Janneck, J., Lee, E.A., Liu, J., Ludvig, J., Sachs, S., , Xiong, Y.: Taming heterogeneity - the Ptolemy approach. Proc. IEEE 91 (1), 127-44 (2003)
7. Grossman, M., Simion Sbˆ ırlea, A., Budimli´ c, Z., Sarkar, V.: CnC-CUDA: Declarative programming for GPUs. In: Cooper, K., Mellor-Crummey, J., Sarkar, V. (eds.) Languages and Compilers for Parallel Computing. pp. 230-245. Springer Berlin (2011)
8. Lee, E., Messerschmitt, D.: Synchronous data flow. Proc. IEEE 75 (9), 1235-245 (1987)
9. Li, P., Agrawal, K., Buhler, J., Chamberlain, R.: Orchestrating safe streaming computations with precise control. In: 4th Int'l Workshop on Extreme Scale Computing Application Enablement - Modeling and Tools. pp. 1017-22 (2014)
10. Roesch, M., et al.: Snort: Lightweight intrusion detection for networks. In: Proc. 13th Systems Administration Conf. (LISA). pp. 229-238 (1999)
11. Thies, W., Karczmarek, M., Amaransinghe, S.: StreamIt: A language for streaming applications. In: 11th Int'l Conf. Compiler Construction. pp. 179-96 (2002)
12. Thies, W., Karczmarek, M., Sermulins, J., Rabbah, R., Amaransinghe, S.: Teleport messaging for distributed stream programs. In: 10th ACM SIGPLAN Symp. Principles and Practice of Parallel Programming. pp. 224-35 (2005)
13. Tyson, E., Buckley, J., Franklin, M., Chamberlain, R.D.: Acceleration of atmospheric Cherenkov telescope signal processing to real-time speed with the AutoPipe design system. Nuclear Instruments and Methods in Physics Research Sec. A: Accelerators, Spectrometers, Detectors and Associated Equipment 595 (2), 474-9 (2008)
14. Viola, P., Jones, M.: Rapid object detection using a boosted cascade of simple features. In: Proc. IEEE Comp. Soc. Conf. Computer Vision and Pattern Recognition (2001)
15. Zaharia, M., Chowdhury, M., Das, T., Dave, A., et al.: Resilient distributed datasets: A fault-tolerant abstraction for in-memory cluster computing. In: 9th USENIX Conf. Networked Systems Design and Implementation. p. 2 (2012)
16. Zaharia, M., Xin, R., Wendell, P., Das, T., Armbrust, M., Dave, A., Meng, X., Rosen, J., Venkataraman, S., Franklin, M., Ghodsi, A., Gonzalez, J., Shenker, S., Stoica, I.: Apache Spark: a unified engine for big data processing. Communications of the ACM 59 (11), 56-65 (2016)
## 7 Appendix: Proofs Omitted in Text
## 7.1 Proof of Lemma 1
Proof. We proceed by induction on the number of signals already on the signal queue S when s is emitted.
Suppose S is empty when n 1 emits s . All items emitted by n 1 prior to s either have been consumed by n 2 or are present on Q . The protocol assigns s an amount of credit equal to the size of Q . This amount is then added to n 2 's current credit counter, which was previously 0. Finally, n 2 consumes s precisely when its current credit counter returns to 0, which happens once n 2 consumes the items that were present on Q when s was emitted.
Now suppose s is emitted when S is not empty. s receives a number of credits equal to the number of items added to Q since the prior signal s ′ . We know inductively that n 2 consumes s ′ precisely when all data items emitted prior to s ′ have been consumed. At this point, the only items on Q must be those emitted after s ′ but before s , and n 2 's current credit counter is 0 since it just consumed a signal. Conclude that n 2 will transfer the credit in s to its current credit counter and will then consume exactly those data items emitted after s ′ but before s before it consumes s itself.
## 7.2 Proof of Lemma 2
Proof. Our proof of deadlock-freedom relies on the following two claims.
Claim. A node cannot have a current credit counter > 0 without a pending data item.
Proof of claim : Suppose that a node's current credit counter is > 0. The credit in the current counter was transferred from the signal s currently at the head of the signal queue; it cannot remain from prior signals because the node did not even check for s until its current credit counter last became 0. Hence, this credit was assigned to s to cover data items that were enqueued at the time that s was issued. Since not all credit has yet been consumed, at least one of these items is still enqueued.
Claim. If a node n has either pending data or a pending signal, one of the following holds: (1) n can consume a data item; (2) n can consume a signal; (3) n is blocked due to insufficient space in its downstream queues.
Proof of claim : The node either has credit or not. If it has credit, then by the previous claim it has pending data that can be consumed. If it has no credit but has a pending signal, then either the signal can be consumed, or credit can be transferred from the signal; in the latter case, there must again be data corresponding to this credit. If there is no credit and no pending signal, then there must be pending data, which can be consumed without credit in the absence of pending signals. In all cases, the node can consume some input unless its downstream queues lack sufficient space.
We now proceed to prove the original lemma. If any node in the pipeline has pending data or a signal, then let n be the last such node. Either n 's downstream queues are empty (else its successor would have pending data or signals), or n has no successor, i.e., it is the last node in the pipeline, which has unbounded output space and cannot block. Hence, node n is not blocked on its downstream queues and so, by the second claim, can be fired to consume input.
We conclude that the application terminates only when all nodes have exhausted their inputs.