## Abductive Inference and C. S. Peirce: 150 Years Later
Subhadeep (DEEP) Mukhopadhyay
Email:
deep@unitedstatalgo.com
## Abstract
Two pillars of the paper . This paper is about two things: (i) Charles Sanders Peirce (1837-1914)-an iconoclastic philosopher and polymath who is among the greatest of American minds. (ii) Abductive inference-a term coined by C. S. Peirce, which he defined as 'the process of forming explanatory hypotheses. It is the only logical operation which introduces any new idea.'
Abductive inference and quantitative economics . Abductive inference plays a fundamental role in empirical scientific research as a tool for discovery and data analysis. Heckman and Singer (2017) strongly advocated 'Economists should abduct .' Arnold Zellner (2007) stressed that 'much greater emphasis on reductive [abductive] inference in teaching econometrics, statistics, and economics would be desirable.' But currently, there are no established theory or practical tools that can allow an empirical analyst to abduct. This paper attempts to fill this gap by introducing new principles and concrete procedures to the Economics and Statistics community. I termed the proposed approach as Abductive Inference Machine ( AIM ).
The historical Peirce's experiment . In 1872, Peirce conducted a series of experiments to determine the distribution of response times to an auditory stimulus, which is widely regarded as one of the most significant statistical investigations in the history of nineteenth-century American mathematical research (Stigler, 1978). On the 150th anniversary of this historical experiment, we look back at the Peircean-style abductive inference through a modern statistical lens. Using Peirce's data, it is shown how empirical analysts can abduct in a systematic and automated manner using AIM .
Keywords : Abductive inference machine; Artificial intelligence; Density sharpening; Informative component analysis; Problem of surprise; Laws of discovery; Self-corrective models.
## 1. INTRODUCTION
Charles Sanders Peirce (1839-1914), America's greatest philosopher of science, was also a brilliant statistician and experimental scientist. For 32 years, from 1859 until 1891, he worked for the United States Coast and Geodetic Survey 1 . During this time, he developed an unfailing passion for experimental research. He was deeply involved in developing theoretical and practical methods for acquiring high-precision scientific measurements, which ultimately earned him an international reputation as an expert in 'measurement error' in physics. Robert Crease (2009), a philosopher and historian of science, noted: 'His [Peirce's] work helped remove American metrology from under the British shadow and usher in an American tradition.'
## Pierce's 1872 Experiment
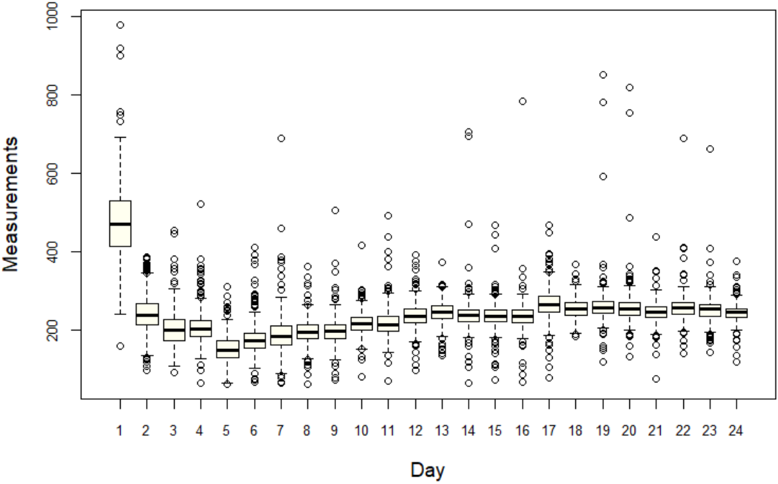
Figure 1: First look at Peirce's auditory response data. The x-axis denotes 24 different days of experiments and the y-axis displays the data of individual experiment as boxplot.
<details>
<summary>Image 1 Details</summary>
### Visual Description
## Box Plot: Daily Measurements Over 24 Days
### Overview
The image displays a box plot visualizing the distribution of measurements across 24 days. Each day is represented by a box plot showing the median, quartiles, and outliers. The y-axis ranges from 0 to 1000, while the x-axis lists days 1–24 sequentially.
### Components/Axes
- **X-axis (Horizontal)**: Labeled "Day," with discrete markers for days 1–24.
- **Y-axis (Vertical)**: Labeled "Measurements," scaled from 0 to 1000 in increments of 200.
- **Box Plot Elements**:
- **Boxes**: Represent the interquartile range (IQR) for each day.
- **Median Lines**: Horizontal black lines within each box.
- **Whiskers**: Extend to the minimum and maximum non-outlier values.
- **Outliers**: Marked as individual circles outside the whiskers.
### Detailed Analysis
- **Day 1**:
- Median ≈ 450.
- Outliers: Two points at ~950 and ~850.
- **Day 2**:
- Median ≈ 400.
- Outliers: One point at ~750.
- **Days 3–6**:
- Medians ≈ 200–300.
- Lower variability compared to Days 1–2.
- **Days 7–16**:
- Medians ≈ 200–250.
- Consistent IQR (~100–150).
- **Days 17–24**:
- Medians ≈ 250–300.
- Outliers: Days 17, 18, 22, 23, and 24 show points above ~600.
- **Outlier Distribution**:
- Highest outlier: Day 1 (~950).
- Lowest outliers: Days 17 and 18 (~150).
### Key Observations
1. **Initial Volatility**: Days 1–2 exhibit high median values and extreme outliers, suggesting anomalous measurements.
2. **Stabilization**: Days 7–16 show reduced variability, with medians clustering tightly around 200–250.
3. **Late-Day Increase**: Days 17–24 display a gradual rise in median values, accompanied by outliers exceeding 600.
4. **Outlier Patterns**: Outliers are concentrated on Days 1, 2, 17, 18, 22, 23, and 24, indicating potential external influences or data collection anomalies.
### Interpretation
The data suggests a dynamic system with three distinct phases:
1. **High-Variability Phase (Days 1–2)**: Extreme outliers and elevated medians may reflect startup effects, calibration issues, or external perturbations.
2. **Stable Phase (Days 7–16)**: Consistent measurements imply a controlled environment or equilibrium state.
3. **Recovery/Adjustment Phase (Days 17–24)**: Rising medians and late outliers could indicate system recovery, recalibration, or new stressors.
The presence of outliers on specific days warrants investigation into data collection protocols or contextual factors (e.g., environmental changes, equipment malfunctions). The overall trend lacks a clear directional bias but highlights cyclical variability, emphasizing the need for further analysis to identify underlying causes.
</details>
1872 Experimental Data . In 1872, he conducted a series of famous experiments to determine the distribution of response times to an auditory stimulus. He measured the time that elapsed between the making of a sharp sound and the record of reception of the sound by an observer,
1 U. S. Coast and Geodetic Survey was established on February 10, 1807, by President Thomas Jefferson. It was the nation's first civilian scientific agency.
employing a Hipp chronoscope (some kind of sophisticated clock). Fig. 1 shows the dataset, which consists of roughly 500 measurements (recorded in nearest milliseconds) each day for k 24 different days 2 . Note that the first-day observations are systematically different from others (also called systematic bias), and the inconsistency was due to the lack of experience of the observer, which was corrected on the next day. The next 23 days show much more consistent (comparable) measurements.
## 2. GAUSS' LAW OF ERROR
What observation has to teach us is [density] function, not a mere number.
$$- C . S . P e i r c e ( 1 8 7 3 )$$
Deciphering the Law of Errors . Peirce's actual motivation for doing the experiment was to study the probabilistic laws of fluctuations (also called errors) in the measurements and to investigate how response time distributions differ from the standard Gauss' law.
Nineteenth-century statistical learning . Peirce (1873) presented a detailed empirical investigation of the reaction-time densities for each day. He was driven by two goals: to understand the shape of the reaction time densities and to compare them with the expected Gaussian distribution. His approach had a remarkably modern conceptual basis: first, he developed smooth kernel density-type probability density estimates to understand the shape of error distributions 3 ; second, he performed a goodness-of-fit (GOF) type assessment through visual comparison between the shape of Gaussian distribution and the nonparametrically estimated densities 4 , and concluded that the reaction-time distributions 'differed very little from' the expected normal probability law 5 .
2 For further details on the experimental setup and the full dataset, consult the online Peirce Edition Project: vol 3, p. 133-160 of the chronological edition (Peirce, 2009). It's also available in the R-package quantreg .
3 Peirce made a pioneering contribution to American statistics by developing the concepts that underpin nonparametric density estimation.
4 However, at that time no theory of GOF was available. It took 30 more years for an English mathematician, Karl Pearson, to make the breakthrough contribution in developing the formal language of the GOF.
5 The term 'normal distribution' was coined by Peirce.
Twentieth-century statistical learning . Almost sixty years later, the same dataset was reanalyzed by Wilson and Hilferty (1929), and they came to a very different conclusion. Wilson and Hilferty performed a battery of tests to verify the appropriateness of the normal distribution. For each series of measurements, they computed 23 statistics (e.g., mean, standard deviation, skewness, kurtosis, interquartile range, etc.) to justify substantial departures from Gaussianity. Interestingly, without any formal statistical test, simply by carefully looking at the boxplots in Fig. 1, we can see the presence of significant skewness (the median cuts the boxes into two unequal pieces), heavy-tailedness (long whiskers relative to the box length), and ample outlying observations-which is good enough to suspect the adequacy of Gaussian distribution as a model for the data.
Remark 1. The non-Gaussian nature of the error distribution of scientific measurements is hardly surprising 6 - in fact, it is the norm, not the exception (Bailey, 2017), which arises primarily because it is hard to control all the factors of a complex measurement process. But what is startling is that even Peirce's experiment, a simple investigation of recording response times with the same instrument by the same person under more or less similar conditions, can produce so much heterogeneity.
' Does statistics help in the search for an alternative hypothesis? There is no codified statistical methodology for this purpose. Text books on statistics do not discuss either in general terms or through examples how to elicit clues from data to formulate an alternative hypothesis or theory when a given hypothesis is rejected. '
- C. R. Rao (2001)
Revised Goal: From Testing to Discovery . Confirmatory analysis through hypothesis testing provides investigators absolutely no clues on what might actually be going on. 7 Simply rejecting a hypothesis-saying that it is non-Gaussian-does not add any new insight into the
6 Even Wilson and Hilferty (1929) noted the same: 'according to our previous experience such long series of observations generally reveal marked departures from the normal law.'
7 An average statistician uses data to confirm or reject a particular theory/model. A competent statistician uses data to sharpen their theory/model.
underlying laws of error. Thus, our focus will be on developing a data analysis technique that can identify the most questionable aspects of the existing model and can also provide concrete recommendations on how to rectify those deficiencies in order to build a better and more realistic model for the measurement uncertainties.
## 3. THE PROBLEM OF SURPRISE
It is not enough to, look for what we anticipate. The greatest gains from data come from surprises. - John Tukey (1972)
Modeling the Surprise . All empirical laws are approximations of reality-sometimes good, sometimes bad. We will be fooling ourselves if we think there is a single best model that fits Peirce's experimental data. Any statistical model, irrespective of how sophisticated it is, should be ready to be surprised by data. The goal of empirical modeling is to develop a general strategy for describing how a model should react and adapt itself to reduce the surprise.
Without surprise, there is no discovery. The 'process' of discovering new knowledge from data starts by answering the following questions: Is there anything surprising in the data? If so, what makes it surprising? How should the current model react to the surprise? How can it modify itself to rationalize the empirical surprise? To develop a model and principle for statistical discovery, we need to first address these fundamental data modeling questions. In subsequent sections, we develop one such general theory.
Basic notations used throughout the paper: X is a continuous random variable with cdf F p x q , pdf f p x q . The quantile function is given by Q p u q F 1 p u q . Expectation with respect to the initial working model F 0 p x q is abbreviated as E 0 p ψ p X qq : ‡ ψ d F 0 , and expectation with respect to the empirical r F is simply written as r E p ψ p X qq : ‡ ψ d r F . The inner product of two functions ψ 1 and ψ 2 in L 2 p dF 0 q will be denoted by x ψ 1 , ψ 2 y F 0 : ‡ ψ 1 ψ 2 d F 0 .
## 4. A MODEL FOR EMPIRICAL DISCOVERY
There is no established practice for dealing with surprise, even though surprise is an everyday occurrence. Is there a best way to respond to empirical surprises?
- Heckman and Singer (2017)
## 4.1 A Dyadic Meta-Model
Science is a 'self-corrective' enterprise that seeks new knowledge by refining the known. 8 The same is true for statistical modeling: it explores and discovers unknown patterns by smartly utilizing the known (expected) model. In the following, we formalize this general principle.
Definition 1 (A Dyadic Meta-Model) . X be a continuous random variable with true unknown density f p x q . Let f 0 p x q represents a possibly misspecified predesignated working model for X , whose support includes the support of f p x q . Then the following density decomposition formula holds:
$$f ( x ) \, = \, f _ { 0 } ( x ) \, d \left ( F _ { 0 } ( x ) ; F _ { 0 } , F \right ) ,$$
where the d p u ; F 0 , F q is defined as
$$d ( u ; F _ { 0 } , F ) = \frac { f ( F _ { 0 } ^ { - 1 } ( u ) ) } { f _ { 0 } ( F _ { 0 } ^ { - 1 } ( u ) ) } , \, 0 < u < 1 , \quad ( 2 )$$
which is called 'comparison density' because it compares the initial model-0 f 0 p x q with the true f p x q and it integrates to one:
$$\int _ { 0 } ^ { 1 } d ( u ; F _ { 0 } , F ) \, d u \, = \, \int _ { x } d ( F _ { 0 } ( x ) ; F _ { 0 } , F ) \, d F _ { 0 } ( x ) \, = \, \int _ { x } \left ( f ( x ) / f _ { 0 } ( x ) \right ) \, d F _ { 0 } ( x ) \, = \, 1 .$$
To simplify the notation, d p F 0 p x q ; F 0 , F q will be abbreviated as d 0 p x q . One can view (1) as a 'meta-model'-a model comprising two sub-models that blends existing imprecise knowledge f 0 p x q with new empirical knowledge d 0 p x q to provide us complete picture of the uncertainty.
8 According to Peirce, every branch of scientific inquiry exhibits 'the vital power of self-correction' that permits us to make progress and grow our knowledge; see, Burch and Parker (2022).
The above density representation formula can be interpreted from many different angles:
1. Model-Editing Tool . The dyadic model provides a general statistical mechanism for designing a 'better' model by editing or sharpening the existing version. For that reason, we call d the density-sharpening function (DSF). Next section presents how to learn DSF from data. The d -modulated repaired f 0 -density in Eq. (1) will be referred to d -sharp f 0 .
2. Surprisal Function . The process of data-driven discovery starts with a surprise-a deviation between the data and the expected model. The DSF d p u ; F 0 , F q gets activated only when model-0 encounters surprise, and its shape encodes the nature of surprise. When there is no surprise, d p u ; F 0 , F q takes the shape of a 'flat' uniform density.
Surprise to information gain : It is not enough to simply detect an empirical surprise. For statistical learning, it is critical to know: What information can we gain from the observed surprise? And how can we use that information to revise our initial model of reality? The density-sharpening function d p u ; F 0 , F q provides a pathway from surprise to information gain that bridges the gap between the initial belief and knowledge.
3. Simon's Means-Ends Analysis . The model (1) interacts with the outer data environment through two information channels:
- Afferent (or 'inward') information: it captures and represents the ' difference ' between the desired and present model using d 0 p x q 9 .
- Efferent (or 'outward') information: it intelligently searches and provides the best course of ' actions ' that changes the present model through (1) to reduce the difference 10 .
Herbert Simon (1988) noted that any general-purpose computational learning system must have these two information processing components. Models equipped with this special structure are known as the 'Means-Ends analysis model' in the artificial intelligence community.
9 It would be pointless to waste computational resources on the redundant part of the data.
10 d 0 p x q 'fires' actions when the difference in information content between F 0 and r F reaches a threshold.
4. Detective's Microscope 11 . Information in the data can be broken down into two parts:
Data Information = Anticipated part + Unexpected surprising part. (3)
Model-0 explains the first part, whereas d 0 p x q captures everything that is unexplainable by the initial f 0 p x q . Accordingly, d 0 p x q performs dual tasks: it reveals the incompleteness of our starting assumptions and provides strategies on how to revise it to account for the observed puzzling facts. In short, d p u ; F 0 , F q plays the role of a detective's microscope , permitting data investigators to assemble clues to initiate a systematic search for new explanatory hypotheses that fit the evidence and solve the puzzle.
5. System-1 and System-2 Architecture 12 . In our dyadic model, System-1 is denoted by f 0 p x q that captures the background knowledge component. Model-0 interacts with the environment through System 2 d -function. The DSF d allows model-0 to self-examine its limitations and also offers strategies for self-correcting to adapt to new situations. The DSF plays the role of a 'supervisor' whose goal is model management. It helps the subordinate f 0 to figure out what's missing and how to fix this. Our dyadic model combines both system-1 and system-2 into one integrated modeling system.
6. A Change Agent : The great philosopher Heraclitus taught us that change is the only constant thing in this world. If we believe in this doctrine then we should focus on modeling the change, not the model itself. 13 The dyadic model operationalizes this philosophy by providing a universal law of model evolution: how to produce a useful model by changing an imperfect model-0 in a data-adaptive manner. The rectified f 0 p x q inherits new characteristics through d 0 p x q that give them a better chance of survival in the new data environment.
11 The name was inspired from John Tukey (1977, p. 52)
12 This 'Two Systems' analogy was inspired by Daniel Kahneman's work on 'Thinking, Fast and Slow.'
13 Isaac Newton confronted a similar problem in the mid-1600s: He wanted to describe a falling object, which changes its speed every second. The challenge was: How to describe a 'moving' object? His revolutionary idea was to focus on modeling the 'change,' which led to the development of Calculus and Laws of Motion. Here we are concerned with a similar question: How to change probability distribution when confronted with new data? In our dyadic model (1), the sharpening function d provides the necessary 'push to change.'
## 4.2 A Robust Nonparametric Estimation Method
To operationalize the density-sharpening law, we need to estimate from data the function d 0 p x q , which is the cause of change in the state of a probability distribution. We describe a theory of robust nonparametric estimation whose core concepts and methodological tools are introduced in a 'programmatic' style-making it easy to translate the theory into a concrete algorithm.
Remark 2 (What are we approximating?) . Before describing the approximation theory, it is vital to emphasize that, unlike traditional nonparametric (or machine learning) methods where the goal is to produce a density estimate p f p x q , in our case, the focus is on estimating the sharpening kernel p d 0 p x q -the 'gap' between theory and measurements. This will provide rational explanations for the surprising facts and, because of Eq. (1), concurrently rectify the initial model f 0 . Also, see sec. 8.
Step 0. Data and Setup . We observe a random sample X 1 , . . . , X n 9 F 0 . By ' 9 ' we mean that F 0 is a tentative (approximate theoretical) model for X that is given to us. And, f p x q denotes the unknown true model from which the data were generated.
Step 1. LP-orthogonal System . Note that DSF d 0 p x q is a function of rankF 0 transform (i.e., probability integral transform with respect to the base measure) F 0 p X q . Hence, one can efficiently approximate d F 0 p x q P L 2 p dF 0 q by expanding it in a Fourier series of polynomials that are function of F 0 p x q and orthonormal with respect to the user-selected base-model f 0 p x q . One such orthonormal system is the LP-family of rank-polynomials (Mukhopadhyay and Fletcher, 2018, Mukhopadhyay, 2017), whose construction is given below.
LP-basis construction for an arbitrary continuous F 0 : Define the first-order LP-basis function as standardized rankF 0 transform:
$$T _ { 1 } ( x ; F _ { 0 } ) \, = \, \sqrt { 1 2 } \left \{ F _ { 0 } ( x ) - 1 / 2 \right \} .$$
Note that E 0 p T 1 p X ; F 0 qq 0 and Var 0 p T 1 p X ; F 0 qq 1. Next, apply Gram-Schmidt procedure
on t T 2 1 , T 3 1 , . . . u to construct a higher-order LP orthogonal system T j p x ; F 0 q :
$$\begin{array} { c c l } T _ { 2 } ( x ; F _ { 0 } ) & = \sqrt { 5 } \left \{ 6 F _ { 0 } ^ { 2 } ( x ) - 6 F _ { 0 } ( x ) + 1 \right \} & & ( 5 ) \end{array}$$
$$\begin{array} { c c l } T _ { 3 } ( x ; F _ { 0 } ) & = & \sqrt { 7 } \left \{ 2 0 F _ { 0 } ^ { 3 } ( x ) - 3 0 F _ { 0 } ^ { 2 } ( x ) + 1 2 F _ { 0 } ( x ) - 1 \right \} & \\ \end{array}$$
$$\begin{array} { r c l } T _ { 4 } ( x ; F _ { 0 } ) & = \sqrt { 9 } \left \{ 7 0 F _ { 0 } ^ { 4 } ( x ) - 1 4 0 F _ { 0 } ^ { 3 } ( x ) + 9 0 F _ { 0 } ^ { 2 } ( x ) - 2 0 F _ { 0 } ( x ) + 1 \right \} , \end{array}$$
and so on. For data analysis, we compute them by executing the Gram-Schmidt process numerically. Hence, there is no need for bookkeeping the explicit formulae of these polynomials. By construction, the LP-sequence of polynomials satisfy the following conditions:
$$\int _ { x } T _ { j } ( x ; F _ { 0 } ) \, d F _ { 0 } \, = \, 0 ; \quad \int _ { x } T _ { j } ( x ; F _ { 0 } ) T _ { k } ( x ; F _ { 0 } ) \, d F _ { 0 } = \delta _ { j k } ,$$
where δ jk is the Kronecker's delta function. The notation for LP-polynomials t T j p x ; F 0 qu is meant to emphasize: (i) they are polynomials of F 0 p x q (not raw x ) and hence are inherently robust. (ii) they are orthonormal with respect to the distribution F 0 , since they satisfy (8). We also define the Unit LP-bases via quantile transform: S j p u ; F 0 q T j p Q 0 p u q ; F 0 q , 0 / u / 1.
Step 2. LP-Fourier Approximation . LP-orthogonal series representation of the densitysharpening function d 0 p x q is given by
$$d _ { 0 } ( x ) \colon = d ( F _ { 0 } ( x ) ; F _ { 0 } , F ) \, = \, 1 + \sum _ { j } L P [ j ; F _ { 0 } , F ] \, T _ { j } ( x ; F _ { 0 } ) ,$$
where the expansion coefficients LP r j ; F 0 , F s satisfy
$$L P [ j ; F _ { 0 } , F ] = \left < d \circ F _ { 0 } , T _ { j } \right > _ { F _ { 0 } } , \quad ( j = 1 , 2 , \dots , ) .$$
Step 3. Nonparametric Estimation . To estimate the LP-Fourier coefficients from data, rewrite Eq. (10) in the following form:
$$L P [ j ; F _ { 0 } , F ] = \int _ { - \infty } ^ { \infty } d _ { 0 } ( x ) T _ { j } ( x ; F _ { 0 } ) f _ { 0 } ( x ) \, d x = \int _ { - \infty } ^ { \infty } T _ { j } ( x ; F _ { 0 } ) f ( x ) \, d x = \mathbb { E } _ { F } [ T _ { j } ( X ; F _ { 0 } ) ] \quad ( 1 1 )$$
which expresses LP r j ; F 0 , F s as the expected value of T j p X ; F 0 q . Accordingly, estimate the LP-parameter as
$$\widetilde { L P } _ { j } \colon = L P [ j ; F _ { 0 } , \widetilde { F } ] \, = \, \widetilde { \mathbb { E } } [ T _ { j } ( X ; F _ { 0 } ) ] \, = \, \frac { 1 } { n } \sum _ { i = 1 } ^ { n } T _ { j } ( x _ { i } ; F _ { 0 } ) .$$
These expansion coefficients act as the coordinates of true f p x q relative to assumed f 0 p x q :
$$\begin{array} { r l } { \left [ F \right ] _ { F _ { 0 } } } & { \colon = \ \left ( L P [ 1 ; F _ { 0 } , \widetilde { F } ] , \dots , L P [ m ; F _ { 0 } , \widetilde { F } ] \right ) , \quad 1 \leqslant m < r } & { ( 1 3 ) } \end{array}$$
where r is the number of unique values observed in the data.
Step 4. Surprisal Index . Can we quantify the surprise of f 0 when it comes in contact with the new data? We define the surprise index of the hypothesized model as follows:
$$S I ( F _ { 0 } , F ) \, = \, \sum _ { j } \left | L P [ j ; F _ { 0 } , F ] \right | ^ { 2 }$$
which can be computed by substituting (12) into (14). The motivation behind this definition comes from recognizing that SI p F 0 , F q ‡ 1 0 d 2 1, i.e., the divergence-measure (14) captures the departure of d p u ; F 0 , F q from uniformity. Note that when d takes the form of Uniform p 0 , 1 q , then no correction is required in (1)-i.e., the assumed model f 0 p x q is capable of fully explaining the data without being surprised at anything. An additional desirable property of the measure (14) is that it is invariant to monotone transformations of the data.
Remark 3 (Information is an observer-dependent concept) . Our definition (14) is different from the classical Shannon-style measure of surprise or information. We view surprise as a 'fundamentally relativistic,' not an absolute quantity. The same data can have different surprising information content for different background-knowledge-based initial models/agents. In more philosophical terms: SI p F 0 , F q captures observer-specific useful information of a dataset.
Step 5. Key Elements of Surprise . A 'large' value of SI p F 0 , F q indicates that the model
f 0 p x q got shocked by the data. But what caused this? This is the same as asking: what are the main 'broken components' of the initial believable model f 0 p x q that need repair? As George Box (1976) said:
Since all models are wrong the scientist must be alert to what is importantly wrong. It is inappropriate to be concerned about mice when there are tigers abroad.
Note that the value of LP j is expected to be 'small' when underlying distribution is close to the assumed F 0 ; verify this from (12). We discuss two pruning strategies that effectively remove the noisy LP-components that can cause the density estimate p f p x q to be unnecessary wiggly. Identify the 'significant' non-zero LP-coefficients 14 with | LP j | ¡ 2 { ? n . One can further refine the denoising method as follows: sort them in descending order based on their magnitude (absolute value) and compute the penalized ordered sum of squares. This Ordered PENalization scheme will be referred as OPEN :
$$\text {OPEN} ( m ) \ = \ \text {Sum of squares of top $m$ LP coefficients } - \frac { \gamma _ { n } } { n } m .$$
For AIC penalty choose γ n 2, for BIC choose γ n log n , etc. For more details see Mukhopadhyay and Parzen (2020) and Mukhopadhyay (2017). Find the m that maximizes the OPEN p m q . Store the selected indices j in the set J ; the set of functions t T j p x ; F 0 qu j P J then denote the key 'surprising directions' that need to be incorporated into the current model to make it data-consistent. The OPEN -smoothed LP-coefficients will be denoted by x LP j .
Step 6. MaxEnt Lazy Update . We build an improved exponential density estimate for d p u ; F 0 , F q , which, unlike the previous L 2 -Fourier series model (9), is guaranteed to be nonnegative estimate and integrates to 1. The basic idea is to choose a model for d to sharpen f 0 in order to provide a better explanation of the data by minimizing surprises as much as possible. We can formalize this idea using the notion of relative-entropy (or Kullback-Leibler
14 Under the null model, sample LP-statistic follows asymptotically N p 0 , n 1 { 2 q .
divergence) between f 0 and the d -sharp f 0 :
$$\begin{array} { r c l } K L ( f _ { 0 } \| f ) & = & \int f ( x ) \log \left \{ \frac { f ( x ) } { f _ { 0 } ( x ) } \right \} \, d x \\ & = & \int \frac { f ( x ) } { f _ { 0 } ( x ) } \log \left \{ \frac { f ( x ) } { f _ { 0 } ( x ) } \right \} f _ { 0 } ( x ) \, d x \\ & = & \int d _ { 0 } ( x ) \log \{ d _ { 0 } ( x ) \} \, f _ { 0 } ( x ) \, d x \end{array}$$
Since d 0 p x q d p F 0 p x q ; F 0 , F q , substituting F 0 p x q u in the above equation, we get the following important result in terms of entropy of d : H p d q ‡ d log d
$$K L ( f _ { 0 } \| f ) = \int _ { 0 } ^ { 1 } d \log d = - E n t r o p y ( d ) ,$$
which can also be viewed as a measure of surprise. Thus the goal of searching for d by minimizing the KL-divergence between the old and new model reduces to the problem of finding a d by maximizing its entropy. This is known as the principle of maximum entropy (MaxEnt), first expounded by E.T. Jaynes (1957). 15 However, an maximization of H p d q ‡ 1 0 d log d under the normalization constraint ‡ 1 0 d 1, among all continuous distributions supported over unit interval, will lead to the trivial solution:
$$d ( u ; F _ { 0 } , F ) \, = \, 1 , \, 0 < u < 1 .$$
Remark 4. Despite its elegance, the classical Jaynesian inference is an incomplete data modeling principle since it only tells us how to assign probabilities, not how to design and select appropriate constraints. Discovery, by definition, can't happen by imposing preconceived constraints. The core 'intelligence' part of any empirical modeling involves appropriately designing and searching for relevant 'directions' (constraints) that neatly capture the surprising information. More discussion on this is given in Mukhopadhyay (2022a).
15 See, for example, the work of Amos Golan (2018) and Esfandiar Maasoumi (1993) for an excellent review of the usefulness of 'maxent information-theoretic thinking' for econometrics and decision sciences. Additional recent works on the application of maximum-entropy techniques in empirical economics can be found in Buansing et al. (2020), Mao et al. (2020), Lee et al. (2021).
Law of Lazy Update . The key question is: how to determine the informative constraints? Jaynes' maximum entropy principle remains completely silent on this issue and assumes we know the relevant constraints ab initio (i.e., sufficient statistic functions)-which, in turn, puts restrictions on the possible 'shape' of the probability distribution. We avoid this assumption as follows, using what we call 'Law of Lazy Update': (i) Identify a small set of most important LP-sufficient statistics functions 16 using Step 5, which filters out the 'directions' where close attention should be focused. (ii) Find a sparse (smoother) probability distribution by maximizing the entropy H p d q under the normalization constraint ‡ d 1 and the following LP-moment constraints:
$$\mathbb { E } [ S _ { j } ( U ; F _ { 0 } ) ] \, = \, L P [ j ; F _ { 0 } , F ] , \quad f o r \, j \in \mathcal { J } .$$
The solution of the above maxent-constrained optimization problem can be shown to take the following exponential (18) form
$$d _ { \pm b { \theta } } ( u ; F _ { 0 } , F ) \, = \, \exp \left \{ \sum _ { j \in \mathcal { J } } \theta _ { j } S _ { j } ( u ; F _ { 0 } ) \, - \, \Psi ( \pm b { \theta } ) \right \} , \ \ 0 < u < 1$$
where Ψ p θ q log ‡ 1 0 exp t j θ j S j p u ; F 0 qu d u.
Remark 5 (Economical and Explanatory Construction) . The principle of 'maxent lazy update' provides a model for d p u ; F 0 , F q , which acts as a policymaker for f 0 -one who formulates the preferred course of action on how to amend the existing model f 0 (incorporating eqs 17) in a cost-effective way to achieve the most 'economical description' of the current reality.
Remark 6. Incidentally, Peirce also had a strong interest in building 'economical' models 17 and was influenced by the English philosopher William of Ockham. During the 1903 Harvard Lectures on Pragmatism, Peirce noted: 'There never was a sounder logical maxim of scientific procedure than Ockham's razor: Entia non sunt multiplicanda praeter necessitatem.'
16 These sets of specially-designed functions provide the simplest and most likely explanation of how the model f 0 differs from reality.
17 Also see Peirce's 1979 article on 'Economy of Research,' which is widely regarded as the first real attempt to establish the fundamental principles of marginal utility theory . Stephen Stigler brought this to my attention.
Remark 7 (Rational agent interpretation) . d 0 p x q acts as a rational agent for f 0 p x q , which designs and selects best possible actions (alternatives) by minimizing the surprise (16), subject to the constraints (17). This kind of rationalistic empirical models were called machina economicus by Parkes and Wellman (2015).
Remark 8. Our style of learning of d function from data performs two critical operations: The formation of new hypotheses (design of LP-sufficient statistic functions of d ) and selection or adoption of some of the most prominent ones (through OPEN model selection).
## 4.3 Repair-Friendly DS p F 0 , m q Models
Definition 2. DS p F 0 , m q stands for D ensityS harpening of f 0 p x q using m -term LP-series approximated d 0 p x q . Two categories of DS p F 0 , m q class of distributions are given below:
$$\text {Orthogonal series DS} ( F _ { 0 } , m ) \, \colon \quad f ( x ) \, = \, f _ { 0 } ( x ) \left [ 1 \, + \, \sum _ { j = 1 } ^ { m } \text {LP} [ j ; F _ { 0 } , F ] \, T _ { j } ( x ; F _ { 0 } ) \right ] ,$$
$$\text {Maximum Entropy DS} ( F _ { 0 } , m ) \colon \quad f ( x ) \, = \, f _ { 0 } ( x ) \exp \left \{ \sum _ { j = 1 } ^ { m } \theta _ { j } T _ { j } ( x ; F _ { 0 } ) \, - \, \Psi ( \theta ) \right \} .$$
They are obtained by replacing (9) and (18), respectively, into the dyadic model (1). The truncation point m indicates the search-radius around the expected f 0 p x q to create permissible models. DS p F 0 , m q models with higher m entertains alternative models of higher complexity. However, to exclude absurdly rough densities, it is advisable to focus on the vicinity of f 0 by choosing an m that is not too large. In our experience, m 6 (or at most 8) is often sufficient for real data applications-since f 0 p x q is a knowledge-based sensible starting model.
Remark 9. The goal of empirical science is to progressively sharpen the existing knowledge by discovering new patterns in the data, thereby leading to a new revised theory. The 'densitysharpening' mechanism facilitates and automates this process.
Remark 10 (Blending the old with the new) . The above density-editing schemes modify the initial probability law f 0 p x q with a small set of new additional 'shape functions' (i.e., LPsufficient statistics t T j p x ; F 0 qu j P J ) that serve as explanations for the surprising phenomenon.
This will be more clear in the next section where we carry out Peirce data analysis using the density-sharpening principle, governed by the simple general law described in Definition 2.
Remark 11. DS p F 0 , m q models can be viewed as 'descent with modification,' which partially inherits characteristics of model-0 and adds some new shapes to it. This shows how new models are born out of a pre-existing inexact model with some modification dictated by the density-sharpening kernel d 0 p x q -thereby helping f 0 p x q to broaden its initial knowledge repertoire.
Remark 12 (Model Economy) . Recall, in Section 3, we raised the question: how should a model adapt and generalize in the face of surprise? DS p F 0 , m q is a class of nonparametricallymodified parametric models that precisely answer this question. In particular, density models (19) and (20) allow modelers to 'fix' their broken models (in a fully automated manner) rather than completely replacing them with a brand new model built from scratch. Two practical advantages of constructing auto-adaptive models: Firstly, it reduces the waste of computational resources, and secondly, it extends the life span of of the initial, imprecise knowledge-model f 0 p x q by making it reusable and sustainable-we call this 'model economy.'
## 5. LAPLACE'S TWO LAWS OF ERROR
Our search for the laws of errors begins with the question: what is the most natural choice of the error distribution that we anticipate to hold at least approximately. Two candidates are:
- Laplace distribution. In 1774, i.e., almost 100 years before Peirce's experiment, Laplace postulated that the frequency of an error could be expressed as an exponential function of the numerical magnitude of the error, disregarding sign (Laplace, 1774). This is known as Laplace's first law of error.
- Gaussian distribution. Laplace proposed Gaussian distribution as the second candidate for the error curve in 1778.
These two distributions provide a simple yet believable model-0 to start our search for a
realistic error distribution for the Peirce data. Our strategy will be as follows: first, would like to know which of Laplace's laws provides a more reasonable choice as an initial candidate model. In other words, which distribution is relatively less surprised by the Peirce data. Second, we like to understand the nature of misspecifications of these two models over the set of 24 experimental datasets. This will ultimately help us repair f 0 p x q by informing us which components are damaged. 18 As John Tukey (1969) said: ' Amount, as well as direction, is vital. '
## 5.1 Informative Component Analysis
Generating new hypotheses in response to the rejection of the initial candidate model is one of the central objectives of Informative Component Analysis (ICA).
Gaussian Error Distribution . We devise a graphical explanatory method, called Informative Component Analysis (ICA), to perform 'informative' data-model comparison in a way that is easily interpretable for large number of parallel experiments like Peirce data. The general process goes as follows:
Algorithm: Informative Component Analysis (ICA)
Step 0. Data and notation. For the t -th day experiment: we observe x t p x t 1 , x t 1 , . . . , x tn t q with empirical distribution r F t .
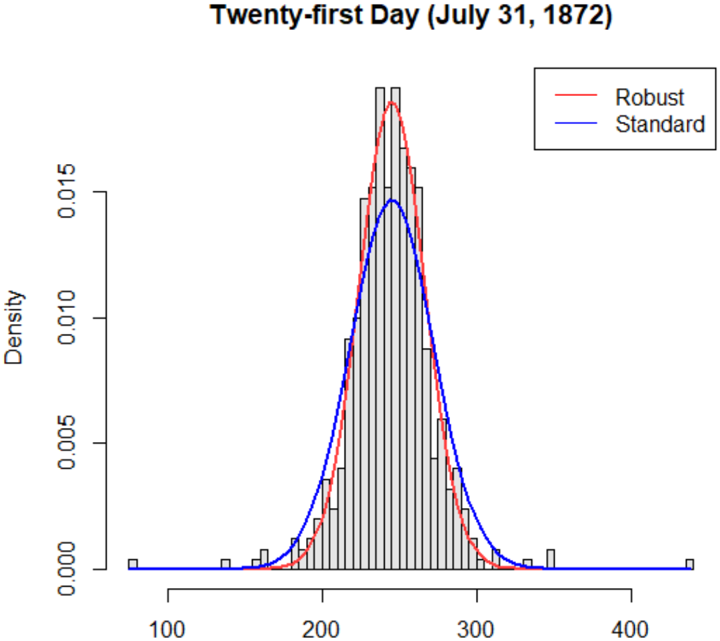
Step 1. For each day, we estimate the best-fitted Gaussian distribution ϕ t N p ˜ µ t , ˜ σ t q , where the parameters are robustly estimated: ˜ µ t is estimated by the median and ˜ σ t is estimated by dividing the interquartile range (IQR) by 1 . 349. The presence of large outlying observations makes the IQR-based robust-scale estimate more appropriate than the usual standard deviation based estimate of σ t ; see Fig. 2.
Step 2. For each experiment, compute the LP-coefficients between the assumed Φ t and the
18 Also, some misspecifications may be harmless as far as the final decision-making is concerned. Knowing the nature of deficiency can help us avoid over-complicating the model-0.
Figure 2: Two normal distributions are compared with different scale estimates: The red curve is based on the robust IQR-based scale estimate and the blue one is the usual standard deviation-based curve. Clearly, the blue curve underestimates the peak and overestimates the width of the density (due to the presence of few large values in the tails).
<details>
<summary>Image 2 Details</summary>
### Visual Description
## Histogram with Density Curves: Twenty-first Day (July 31, 1872)
### Overview
The image is a histogram overlaid with two density curves: a red "Robust" curve and a blue "Standard" curve. The x-axis is labeled "Density" with values ranging from 100 to 400, while the y-axis is also labeled "Density" with values from 0.000 to 0.015. The legend is positioned in the top-right corner, associating red with "Robust" and blue with "Standard". The histogram bars are gray, and the curves are smooth, suggesting a comparison of distributions.
### Components/Axes
- **X-axis**: Labeled "Density", with values from 100 to 400.
- **Y-axis**: Labeled "Density", with values from 0.000 to 0.015.
- **Legend**: Top-right corner, with red for "Robust" and blue for "Standard".
- **Histogram Bars**: Gray, with varying heights across the x-axis range.
### Detailed Analysis
- **Red Curve (Robust)**:
- Peaks sharply around **250** on the x-axis.
- The curve is narrower, with a maximum density of approximately **0.012**.
- The curve declines symmetrically on both sides of the peak.
- **Blue Curve (Standard)**:
- Peaks slightly lower (around **275**) with a maximum density of approximately **0.010**.
- The curve is broader, with a more gradual decline.
- **Histogram Bars**:
- The bars are tallest between **200–300** on the x-axis, aligning with the peaks of both curves.
- The bars are evenly spaced, with heights decreasing toward the edges of the x-axis range.
### Key Observations
1. The **Robust** curve has a higher peak and narrower spread compared to the **Standard** curve.
2. The **Standard** curve is broader, indicating greater variability in the data.
3. Both curves align with the histogram’s tallest bars, suggesting the data is concentrated around the 200–300 range.
4. The x-axis label "Density" is ambiguous, as it typically refers to the y-axis in standard histograms. This may indicate a mislabeling or unconventional axis configuration.
### Interpretation
The chart compares two distributions: "Robust" and "Standard". The **Robust** distribution is more concentrated, suggesting lower variability or a more precise measurement, while the **Standard** distribution is broader, indicating higher variability. The date "July 31, 1872" may contextualize the data, potentially relating to historical records (e.g., economic, social, or scientific metrics). The overlapping of the curves with the histogram bars implies that both models approximate the same underlying data, but with differing assumptions about distribution shape. The ambiguity in axis labeling ("Density" for both axes) could lead to misinterpretation, as the x-axis likely represents a variable (e.g., "Value" or "Measurement") rather than density itself.
### Spatial Grounding
- **Legend**: Top-right corner, clearly associating red with "Robust" and blue with "Standard".
- **Curves**: Overlaid on the histogram, with the red curve positioned slightly to the left of the blue curve.
- **Histogram Bars**: Gray, with heights concentrated between 200–300 on the x-axis.
### Trend Verification
- **Robust Curve**: Slopes upward to a peak at ~250, then declines symmetrically.
- **Standard Curve**: Slopes upward to a peak at ~275, then declines more gradually.
- **Histogram Bars**: Tallest between 200–300, with decreasing heights toward the edges.
### Content Details
- **X-axis Values**: 100–400 (labeled "Density").
- **Y-axis Values**: 0.000–0.015 (labeled "Density").
- **Peak Densities**:
- Robust: ~0.012 at x ≈ 250.
- Standard: ~0.010 at x ≈ 275.
- **Histogram Bar Heights**: Vary between 0.000 and 0.015, with the tallest bars near the curve peaks.
### Notable Anomalies
- The x-axis label "Density" conflicts with standard histogram conventions, where the x-axis typically represents the variable being measured. This may indicate a mislabeling or unconventional axis configuration.
- The red curve (Robust) is narrower and higher than the blue curve (Standard), suggesting a trade-off between precision and spread in the two models.
### Conclusion
The chart illustrates a comparison between two statistical models ("Robust" and "Standard") applied to data from July 31, 1872. The **Robust** model exhibits a more concentrated distribution, while the **Standard** model shows greater variability. The overlapping of the curves with the histogram bars suggests both models approximate the same data, but with differing assumptions about distribution shape. The ambiguity in axis labeling ("Density" for both axes) warrants clarification to avoid misinterpretation. The historical context of the date may provide additional insights into the data’s significance.
</details>
empirical distribution r F t .
$$L P [ j ; \Phi _ { t } , \widetilde { F } _ { t } ] \ = \ \mathbb { E } \left [ T _ { j } ( X _ { t } ; \Phi _ { t } ) ; \widetilde { F } _ { t } \right ] \ = \ \frac { 1 } { n _ { t } } \sum _ { i = 1 } ^ { n _ { t } } T _ { j } ( x _ { t i } ; \Phi _ { t } ) .$$
for t 1 , 2 , . . . , 24 and j 1 , . . . , 4. The smoothed LP-coefficients (applying OPEN model selection method based on AIC-penalty; see equation 15) are stored in LP r t, j s : x LP r j ; Φ t , r F t s .
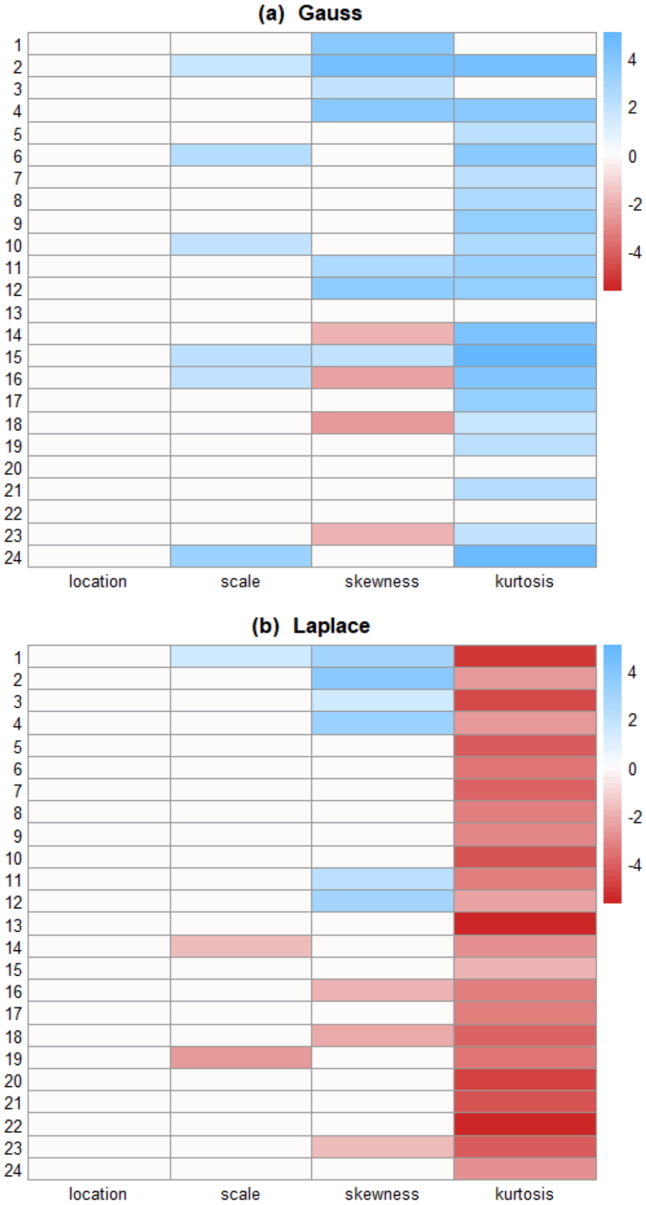
Step 3. LP-Map: Display the 24 4 LP-matrix as an image for easy visualization and interpretation. This is shown in Fig. 3(a).
Figure 3: Informative component analysis: LP-Map for Gauss and Laplace models. The rows denote different time points and columns are the order of LP coefficients LP r t, j s . This graphical explanatory method uncovers what are some of the most prominent ways a large number of related distributions differ from the anticipated f 0 p x q .
<details>
<summary>Image 3 Details</summary>
### Visual Description
## Heatmap: Comparison of Gauss and Laplace Distributions
### Overview
The image contains two side-by-side heatmaps comparing the Gauss and Laplace distributions across four statistical properties: location, scale, skewness, and kurtosis. Each heatmap uses a color gradient from red (-4) to blue (+4) to represent values, with rows numbered 1–24 and columns labeled by statistical properties.
---
### Components/Axes
- **X-Axes (Columns)**:
- `location`
- `scale`
- `skewness`
- `kurtosis`
- **Y-Axes (Rows)**:
- Numbered 1–24 (no explicit labels beyond row numbers).
- **Legends**:
- Color scale: Red (-4) to Blue (+4), with intermediate shades representing intermediate values.
- Positioned on the right of each heatmap.
---
### Detailed Analysis
#### (a) Gauss Heatmap
- **Location**:
- Rows 1, 3, 4, 5, 6, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24 show **dark blue** (values ~4).
- Rows 2, 7, 8, 9, 24 show **light blue** (values ~2).
- **Scale**:
- Rows 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24 show **light blue** (values ~2).
- Row 1 shows **dark blue** (value ~4).
- **Skewness**:
- Rows 3, 4, 5, 6, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24 show **dark red** (values ~-4).
- Rows 1, 2, 7, 8, 9 show **light red** (values ~-2).
- **Kurtosis**:
- Rows 1, 3, 4, 5, 6, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24 show **dark blue** (values ~4).
- Rows 2, 7, 8, 9, 24 show **light blue** (values ~2).
#### (b) Laplace Heatmap
- **Location**:
- Rows 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24 show **dark red** (values ~-4).
- **Scale**:
- Rows 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24 show **dark red** (values ~-4).
- **Skewness**:
- Rows 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24 show **dark red** (values ~-4).
- **Kurtosis**:
- Rows 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24 show **dark red** (values ~-4).
---
### Key Observations
1. **Gauss Distribution**:
- Dominated by **positive values** (blue) in `location`, `scale`, and `kurtosis`.
- `skewness` is predominantly **negative** (red), with most rows showing extreme negativity (-4).
- Row 24 in `kurtosis` is an outlier with a lighter blue (~2).
2. **Laplace Distribution**:
- Entirely **negative values** (red) across all properties.
- `location` and `scale` show uniform extreme negativity (-4).
- `skewness` and `kurtosis` also exhibit extreme negativity (-4) for all rows.
---
### Interpretation
- **Gauss vs. Laplace**:
- The Gauss distribution exhibits **asymmetry** in `skewness` (extreme negativity) but **positivity** in `location`, `scale`, and `kurtosis`, suggesting a heavier tail or higher concentration in these properties.
- The Laplace distribution is **uniformly negative** across all properties, indicating consistent underperformance or lower values compared to Gauss.
- **Statistical Implications**:
- The stark contrast in `skewness` (Gauss: -4, Laplace: -4) suggests both distributions are left-skewed, but Gauss has variability in other properties.
- The Laplace distribution’s uniformity in negativity may imply a more constrained or deterministic behavior compared to Gauss.
- **Outliers**:
- Row 24 in Gauss’s `kurtosis` (value ~2) deviates from the trend, potentially indicating an anomaly or special case.
---
### Spatial Grounding
- **Legend Position**: Right-aligned for both heatmaps.
- **Color Consistency**: Red (-4) and blue (+4) align with the legend in both heatmaps.
- **Row/Column Alignment**: Rows 1–24 are vertically stacked; columns are horizontally aligned under their labels.
---
### Conclusion
The heatmaps highlight fundamental differences between Gauss and Laplace distributions. Gauss shows variability and positivity in key properties, while Laplace is uniformly negative, suggesting distinct statistical behaviors. Further analysis could explore the implications of these differences in modeling or data fitting contexts.
</details>
Interpretation . What can we learn from the LP-map? It tells us the nature of non-Gaussianity of the error distributions for all 24 of the experiments in a compact way. The ICA-diagram detects three major directions of departure (from assumed Gaussian law) that more or less consistently appeared across different days of the experiment: (i) excess variability: This is indicated by the large positive values of the second-order LP-coefficients (2nd column of the LP-matrix) t LP t 2 u 1 / t / 24 . (ii) Asymmetry: It is interesting to note that the values of t LP t 3 u 1 / t / 24 change from positive to negative somewhere around the 15th day-which implies that the skewness of the distributions switches from left-skewed to right-skewed around the middle of the experiment. (iii) Long-taildness: Large positive values of t LP t 4 u 1 / t / 24 strongly indicate that the measurement densities are heavily leptokurtic, i.e., they possess larger tails than normal. These fatter tails generate large (or small) discrepant errors more frequently than expected-as we have witnessed in Fig. 1.
Laplace Error Distribution . Here we choose f 0 p x q as the Laplace p µ, s q distribution:
$$f _ { 0 } ( x ) = \frac { 1 } { 2 s } \exp \left ( - \frac { | x - \mu | } { s } \right ) , \, x \in \mathcal { R }$$
where µ P R and s ¡ 0. The unknown parameters are estimated using the maximum likelihood (MLE) method that automatically yields robust estimates: sample median for the location parameter µ and mean absolute deviation from the median for the scale parameter s .
The LP-map after applying the ICA algorithm is displayed in Fig. 3(b), which shows that a moderate degree of skewness and a major tail-repairing are needed to make Laplace consistent with the data. It is important to be aware of them to build a more realistic model of errorswhich is pursued in the next section.
Laplace or Gauss? Following (14), compute
$$S I ( F _ { 0 t } , \widetilde { F } _ { t } ) \ = \ \sum _ { j = 1 } ^ { 4 } \left | \widehat { L P } [ t , j ] \, \right | ^ { 2 } ,$$
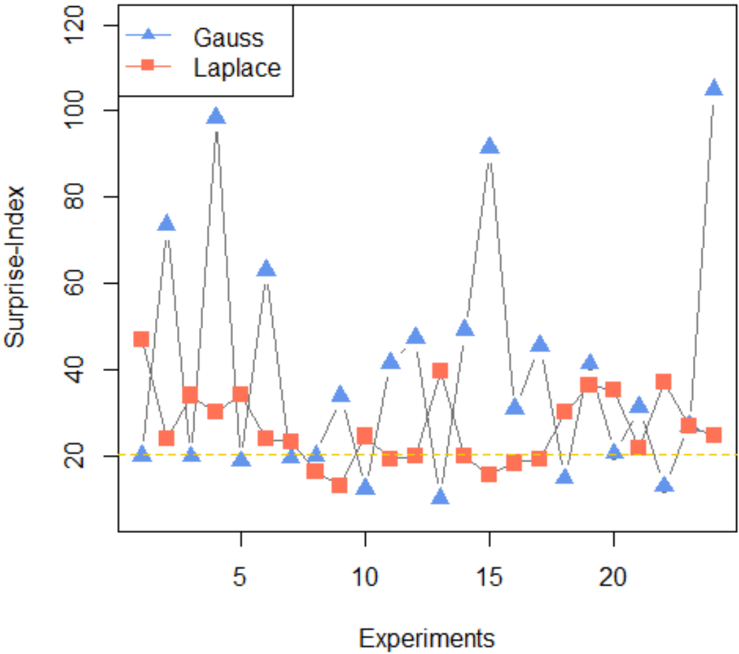
Figure 4: Shows the surprisal-indices (22) for the Gauss and Laplace models, over the sequence of 24 experiments. A 'small' value of SI p F 0 , r F q indicates that it is comparatively easier to repair f 0 p x q to fit the data. The plot provides a clear rational basis for choosing Laplace as a preferred model-0 since the blue curve consistently exceeds the orange curve for most experiments.
<details>
<summary>Image 4 Details</summary>
### Visual Description
## Line Graph: Surprise Index Across Experiments
### Overview
The image depicts a line graph comparing the "Surprise Index" performance of two algorithms ("Gauss" and "Laplace") across 20 experiments. The y-axis represents the Surprise Index (0–120), while the x-axis represents experiment numbers (0–20). A dashed yellow reference line at ~20 on the y-axis is included for comparison.
### Components/Axes
- **X-axis (Experiments)**: Labeled "Experiments" with ticks at 0, 5, 10, 15, 20.
- **Y-axis (Surprise Index)**: Labeled "Surprise Index" with ticks at 0, 20, 40, 60, 80, 100, 120.
- **Legend**: Located in the top-left corner, associating:
- **Blue triangles (▲)**: "Gauss"
- **Red squares (■)**: "Laplace"
- **Reference Line**: Dashed yellow line at y=20.
### Detailed Analysis
1. **Gauss (Blue Triangles)**:
- **Trend**: Highly volatile with sharp peaks and troughs.
- **Key Peaks**:
- Experiment 5: ~90
- Experiment 10: ~60
- Experiment 15: ~85
- Experiment 20: ~110 (highest value)
- **Lowest Value**: ~10 (experiment 12).
- **Pattern**: Spikes correlate with experiment numbers divisible by 5.
2. **Laplace (Red Squares)**:
- **Trend**: Stable with minor fluctuations.
- **Range**: Consistently between ~15–40.
- **Peaks**: ~40 (experiments 3, 8, 13, 18).
- **Lowest Value**: ~15 (experiment 12).
3. **Reference Line (Yellow)**:
- Acts as a baseline; most Laplace values stay above it, while Gauss dips below it occasionally.
### Key Observations
- **Gauss** exhibits extreme variability, with surprise index values exceeding 100 in later experiments.
- **Laplace** maintains a narrow, predictable range, suggesting lower sensitivity to experimental conditions.
- The yellow reference line (~20) may represent a threshold for "acceptable" surprise, which Laplace consistently meets or exceeds.
### Interpretation
The data suggests **Gauss** is prone to high unpredictability (e.g., experiment 20’s 110 value), potentially indicating instability or overfitting. **Laplace**’s consistency implies robustness, making it preferable for applications requiring reliability. The yellow line’s placement at 20 could signify a performance benchmark, with Laplace outperforming it in stability. The correlation of Gauss’ peaks with experiment numbers divisible by 5 hints at cyclical or systematic influences in its behavior.
</details>
by taking the sum of squares of each row of the LP-matrix. Fig. 4 compares the surprisalindex for the normal and Laplace distribution over 24 experiments. From the plot, it is evident that Peirce's data were better represented by Laplace than by Gaussian.
## 5.2 Examples
The primary goal here is to show how density-sharpening provides a statistical method for repairing a scientifically meaningful model based on observed data. To that end, we apply the theory of density-sharpening to two specific day studies with f 0 p x q as the Laplace distribution.
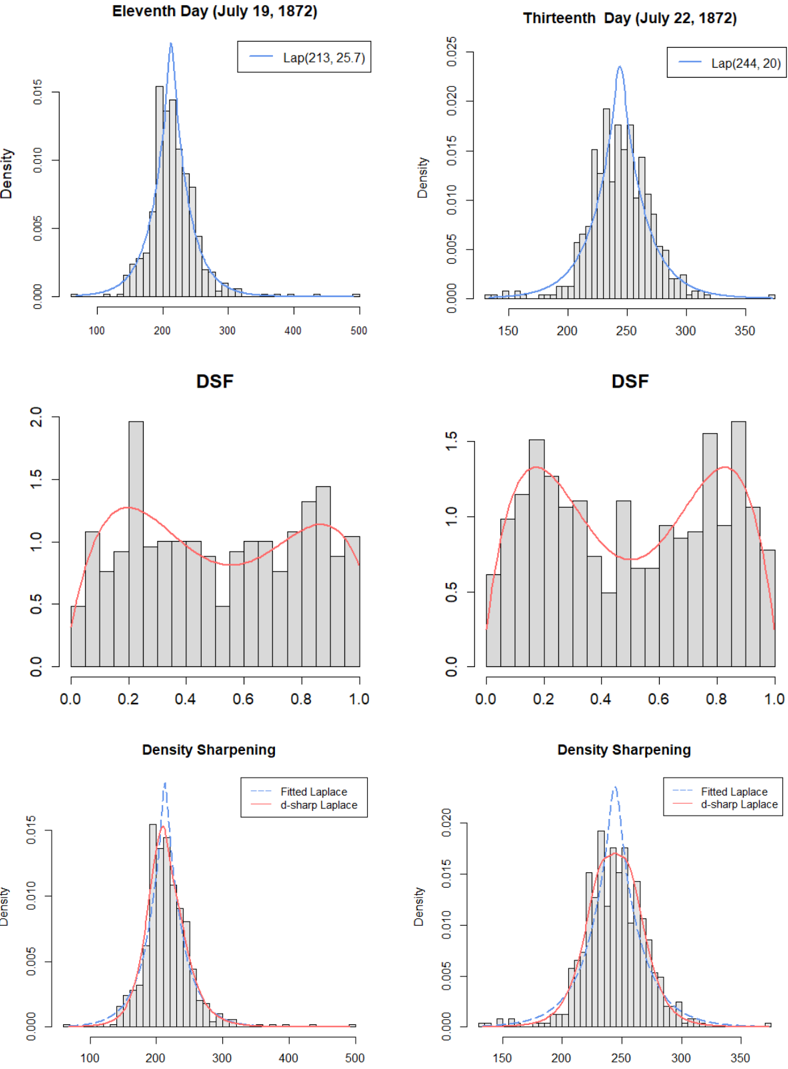
Study #11 (July 19, 1872). The best fitted Laplace distribution with mean 213 and scale parameter 25 . 7 is shown in the top left of Fig. 5. The estimated sharpening kernel with
Density
Figure 5: Mechanism of density-sharpening for 11th (1st column) and 13th (2nd column) day experiments. Top row: Display the best-fitted Laplace distributions f 0 . Middle row: Displays the estimate p d p u ; F 0 , r F q , which reveals the nature of statistical uncertainties of the Laplace models. Put it simply, the shape of p d p u ; F 0 , r F q answers the central question of discovery: What have we learned from the data that we did not already know? This helps to invent new hypotheses that are worthy of pursuit. Last row: Estimated SharpLaplace models f 0 p x q p d 0 p x q are shown (red curves). Here p d 0 p x q rectifies the shortcomings of Laplace model by 'bending' it in a data-adaptive manner.
<details>
<summary>Image 5 Details</summary>
### Visual Description
## Grid of Statistical Plots: Density Distributions and DSF Analysis (July 1872)
### Overview
The image contains six statistical plots arranged in a 2x3 grid, analyzing density distributions and density sharpening functions (DSF) for two dates in July 1872. Each plot combines histograms with fitted curves, focusing on Laplace distributions and their sharpened variants.
---
### Components/Axes
1. **Top Row (Density Plots)**
- **X-axis**: Density values (range: 100–500 for July 19; 150–350 for July 22)
- **Y-axis**: Density (0.000–0.015 for July 19; 0.000–0.025 for July 22)
- **Legends**:
- Blue dashed line: "Lap(μ, σ)" parameters (July 19: μ=213, σ=25.7; July 22: μ=244, σ=20)
- **Key Elements**:
- Gray histograms overlaid with Laplace curves
- Spatial grounding: Legends in top-right corner
2. **Middle Row (DSF Plots)**
- **X-axis**: DSF values (0.0–1.0)
- **Y-axis**: Density (0.0–2.0)
- **Legends**:
- Red solid line: "Fitted Laplace"
- **Key Elements**:
- Gray histograms with red Laplace curves
- Bimodal distributions observed in July 22 plot
3. **Bottom Row (Density Sharpening)**
- **X-axis**: Density values (100–500)
- **Y-axis**: Density (0.000–0.015)
- **Legends**:
- Blue dashed: "Fitted Laplace"
- Red solid: "d-sharp Laplace"
- **Key Elements**:
- Overlapping curves showing sharpening effects
- Spatial grounding: Legends in bottom-right corner
---
### Detailed Analysis
#### Top Row: Density Distributions
1. **Eleventh Day (July 19, 1872)**
- Peak density at **213** with Laplace parameters μ=213, σ=25.7
- Histogram shows right-skewed distribution with tail extending to 500
- Laplace curve closely matches histogram peak but underestimates tail
2. **Thirteenth Day (July 22, 1872)**
- Peak density at **244** with Laplace parameters μ=244, σ=20
- Narrower distribution (σ=20 vs. 25.7) with sharper peak
- Histogram shows reduced right-skew compared to July 19
#### Middle Row: DSF Analysis
1. **July 19 DSF**
- Unimodal distribution peaking at **0.5**
- Laplace curve fits well but shows minor deviations at 0.2 and 0.8
2. **July 22 DSF**
- **Bimodal distribution** with peaks at **0.3** and **0.7**
- Laplace curve fails to capture bimodality, suggesting model mismatch
- Higher density values (up to 1.5) indicate increased variability
#### Bottom Row: Density Sharpening
1. **July 19**
- **d-sharp Laplace** (red) sharpens peak to **220** (vs. 213 for fitted)
- Tail reduction: Density drops below 0.005 after 300 (vs. 0.01 at 300 for fitted)
2. **July 22**
- **d-sharp Laplace** sharpens peak to **250** (vs. 244 for fitted)
- Bimodal structure partially preserved but with reduced secondary peak at 0.7
---
### Key Observations
1. **Temporal Shift**: Mean density increased by **31 units** (213 → 244) between July 19–22
2. **Volatility Decrease**: Standard deviation dropped by **22%** (25.7 → 20)
3. **Bimodal Emergence**: DSF on July 22 reveals dual processes not visible in raw density
4. **Sharpening Effect**: d-sharp Laplace reduces tail probabilities by **~60%** at extreme values
---
### Interpretation
The data suggests a dynamic system with:
- **Increasing Central Tendency**: Mean density rose by 14.5% over 3 days, possibly indicating intensifying activity
- **Reduced Uncertainty**: Tighter distribution (lower σ) implies stabilizing conditions
- **Latent Bimodality**: The DSF bimodality on July 22 hints at two competing processes (e.g., diurnal cycles or competing hypotheses)
- **Sharpening Utility**: d-sharp Laplace improves peak accuracy at the cost of tail sensitivity, useful for hypothesis testing but risky for outlier detection
The plots collectively demonstrate how statistical properties evolve over time, with sharpening techniques offering tradeoffs between precision and robustness. The bimodal DSF warrants further investigation into potential dual mechanisms driving the system.
</details>
smoothed LP-coefficients (see Sec. 4.2) is given below:
$$\begin{array} { r l } { d _ { 0 } ( x ) \, \colon = \, d ( F _ { 0 } ( x ) ; F _ { 0 } , F ) \, = \, 1 + 0 . 0 9 5 T _ { 3 } ( x ; F _ { 0 } ) - 0 . 1 4 8 T _ { 4 } ( x ; F _ { 0 } ) , } & { ( 2 3 ) \, d ( F _ { 0 } ( x ) ; F _ { 0 } , F ) \, = \, 1 + 0 . 0 9 5 T _ { 3 } ( x ; F _ { 0 } ) - 0 . 1 4 8 T _ { 4 } ( x ; F _ { 0 } ) , } \end{array}$$
and is shown in the middle panel.
The graphical display of d 0 p x q provides actionable insights into how to modify the Laplace distribution to reduce the empirical surprise. The non-zero x LP 3 and x LP 4 indicates that the Laplace distribution needs to be corrected for skewness and kurtosis, which is accomplished via LP-orthogonal series DS p F 0 , m q model (19):
$$\widehat { f } ( x ) \, = \, \frac { 1 } { 2 s _ { 0 } } \exp \left ( - \frac { | x - \mu _ { 0 } | } { s _ { 0 } } \right ) \, \left [ 1 \, + \, 0 . 0 9 5 T _ { 3 } ( x ; F _ { 0 } ) \, - \, 0 . 1 4 8 T _ { 4 } ( x ; F _ { 0 } ) \right ] ,$$
where p µ 0 , s 0 q p 213 , 25 . 7 q . The model (24) sharpens the assumed Laplace law to render it more closer to the observed fact. The bottom-left panel of Fig. 5 displays the asymmetric Laplace distribution with a shorter left-tail. The maxent DS p F 0 , m q estimate
$$\widehat { \widehat { f } } ( x ) = \frac { 1 } { 2 s _ { 0 } } \exp \left ( - \frac { | x - \mu _ { 0 } | } { s _ { 0 } } \right ) \, \exp \left \{ \, 0 . 0 9 8 T _ { 3 } ( x ; F _ { 0 } ) \, - \, 0 . 1 5 3 T _ { 4 } ( x ; F _ { 0 } ) \, - \, 0 . 0 1 5 2 \right \} ,$$
whose shape is almost indistinguishable from that of (24), and thus not displayed.
Study #13 (July 22, 1872). We apply the same steps to derive the error distributions of the day-13 experiment. We choose f 0 p x q as Laplace p 244 , 20 q and estimate the density-sharpening function:
$$d _ { 0 } ( x ) \, \colon = \, d ( F _ { 0 } ( x ) ; F _ { 0 } , F ) \, = \, 1 - 0 . 2 5 6 T _ { 4 } ( x ; F _ { 0 } ) .$$
The shape of p d 0 p x q clearly indicates that the peak and the tails of the initial Laplace distribution need repairing.
Ampliative character of our modeling: The DSF p d 0 p x q allows the Laplace to identify its own limitations and drives it to evolve into a new, more complete one:
$$\widehat { f } ( x ) \ = \ \frac { 1 } { 2 s _ { 0 } } \exp \left ( - \frac { | x - \mu _ { 0 } | } { s _ { 0 } } \right ) \, \left [ 1 \, - \, 0 . 2 5 6 T _ { 4 } ( x ; F _ { 0 } ) \right ] ,$$
with p µ 0 , s 0 q p 244 , 20 q ; shown in the bottom-right panel of Fig. 5. Compared with the Laplace distribution (the blue curve), the d -modified Laplace (the red curve) is much wider with a rounded peak and clipped tails.
## 6. A GENERALIZED LAW OF ERRORS
We have seen that for Peirce data, Laplace distribution was surprised in different manners for different experiments (refer Fig. 3b and Fig. 5): e.g., on day 11, the Laplace model got puzzled by the discrepancy in skewness, and tail of the measurement distribution, whereas on day 13, the surprise was mainly due to tail differences. The question naturally arises: how should a Laplace model respond to unexpected changes in data? A proposal for generalized law of errors is given that allows Laplace to automatically adapt to new data environments.
Definition 3 (Self-improving Laplace model) . We call X SharpLaplace ( m ), when the density of X obeys the following parameterizable form:
$$f ( x ) \ = \ \frac { 1 } { 2 s } \exp \left ( - \frac { | x - \mu | } { s } \right ) \, \exp \left \{ \sum _ { j = 1 } ^ { m } \theta _ { j } T _ { j } ( x ; F _ { 0 } ) \, - \, \Psi ( \pm b { \theta } ) \right \} , \quad x \in \mathcal { R } .$$
The insights gained from the analysis done in Sec. 5.2 suggest that m 4 or 6 could be perfectly reasonable for most practical purposes. The power of this model lies in its capacity to self-modify its structure in a data-driven manner.
Remark 13. SharpLaplace class of error models has inbuilt 'rules' (principles and mechanisms) that tell a Laplace how to adapt with the data in a completely autonomous fashion without being pre-programmed into them. This auto-adaptive nature makes this model realistic enough to be useful for a wide range of scientific applications.
## 7. PEIRCE'S LAW OF DISCOVERY
Not the smallest advance can be made in knowledge beyond the stage of vacant staring, without making an abduction at every step. - C. S. Peirce (1901)
All empirical scientific inquiry goes through three fundamental inferential phases:
- Discovery: developing new testworthy hypotheses;
- Hypothesis testing: confirming the plausibility of a hypothesis;
- Prediction: predicting by extrapolating the acceptable model.
Over the last century or so, statistical inference has been dominated by hypothesis testing and prediction 19 problems, virtually neglecting the key question of where the reasonable hypothesis came from, leaving it to the scientists' imagination and speculation. In the article 'Statistics for Discovery,' George E. P. Box argued that
[S]tatistics has been overly influenced by mathematical methods rather than the scientific method and consequently the subject has been greatly skewed towards testing rather than discovery. - George Box (2001)
Our focal interest is in the problem of discovery, not confirmation or prediction. We showed how density-sharpening based modeling can provide the basis for developing statistical laws of discovery.
Charles Sanders Peirce introduced the idea of abductive inference (as opposed to inductive inference) to describe the process of generating hypotheses in order to explain surprising facts. He developed abductive reasoning over 50 years (between 1865 and 1914), and it is considered as Peirce's most significant contribution to the logic of science. According to Peirce, abduction 'is the only logical operation which introduces any new idea.' The importance of abduction for scientific discovery was further stressed by Heckman and Singer (2017):
19 Discovery is much harder than prediction because one can go away with good prediction without understanding. But for discovery, understanding 'how and why' is a must.
Abduction is different from falsification or corroboration. It moves descriptions of the world forward rather than just confirming or falsifying hypotheses. It is part of a process of discovery where model reformulation, revision of hypotheses and addition of new information are part of the process.
Abductive Inference Machine (AIM) . This paper lays out a proposal for algorithmic operationalization of Peircean style abductive inference and discovery. In particular, we described how the density-sharpening principle can help us design an Abductive Inference Machine ( AIM 20 ) that (i) allows us to properly handle model uncertainty and misspecifications; (ii) produces abductive instinct -by guiding us to make better decisions (than depending on pure luck alone) in formulating and adopting new promising hypotheses that have a better chance of being true; and (iii) generates a preferred course of actions for extracting statistical models from experimental data by revising an initially misspecified scientific model.
## 8. AIM: SCIENCE OF MODEL DEVELOPMENT AND REVISION
AIM is a theory of model-revision , not parameter estimation (MLE/Bayes/robust methods) or curve-fitting (machine learning methods). There are some unique objectives and challenges, which set it apart from traditional data modeling cultures. In the following, we will highlight a few major ones (D1-D7), taking help from the Peirce data analysis done in Section 5.
Four stages of abductive model building:
1. Initial state. AIM starts with an approximate model f 0 (based on, say, some economic theory) and measurements. 21 The top left density in Fig. 5 shows the best-fitted theoretical model-the Laplace distribution for experiment #11, where the unknown parameters were estimated using MLE.
D1 Non-standard inferential questions: Justification discovery . However, for modern econometricians and policymakers, parameter estimation or significance testing routines (clas-
20 It tells empirical analysts where to AIM as they search for possible new discoveries.
21 In our context, the theory of Laplace's law of error was confronted with Peirce's experimental data.
sical inference; see Haavelmo (1944)) are not the most interesting issues. Modern quantitative economists are more concerned with questions like: 'How far is our speculated model from reality? What are the most important gaps in our understanding? In which directions can I improve my theory-based model?' Developing a general approach to answering these modeling questions is the central imperative of AIM .
2. Encountering surprise . 'Surprise' jumpstarts the abductive learning process. Surprise essentially means that there is something new in the data relative to the assumed model f 0 , which we estimate by SI p F 0 , F q following Eq. (14). Simply put, it quantifies how much new information is left on the data to be explained; see the orange curve in Fig. 4. Intelligent learners (agents) utilize surprise as a source of additional information to learn something new about the phenomena.
D2 Model-disequilibrium theory . A 'large' value of SI p F 0 , F q indicates the model is 'out of equilibrium' with the current environment, and to restore equilibrium, a careful revision of the current theoretical model (beyond parameter tuning) is necessary. But how do we sharpen the existing model? Can we develop an automatic procedure to generate the sharpening rules? These questions are beyond the reach of classical statistical learning methods. AIM approaches these questions by first characterizing the 'knowledge-gap' between the postulated theory and the observed measurements.
3. Discovering the knowledge-gap . Fig. 5 (left of middle panel) displays the estimated sharpening kernel p d p u ; F 0 , F q for experiment #11, which acts as a 'channel' through which information flows from the data to the model-obeying the density-sharpening principleto bring the system (model-data) back to equilibrium. Accordingly, p d p u ; F 0 , F q acts as a 'bridge' between a theorized model and actual measurements. The following remark by Trygve Haavelmo (1944) highlights how crucial this accomplishment is:
The method of econometric research aims, essentially, at a conjunction of economic theory and actual measurements, using the theory and technique of statistical inference as a bridge pier.
D3 Hypotheses generation . Abduction is the logic of discovery. Why do we need a logic for discovery? Charles Peirce, Herbert Simon, and many other prolific researchers believed that a trial-and-error search for 'invention' is seldom a worthwhile strategy, especially for complex systems (like economics, biology, etc.). Norwood Hanson said it beautifully in his book:
' If establishing an hypothesis through its predictions has a logic, so has the conceiving of an hypothesis. ' -Patterns of Discovery
(1958)
AIM helps scientists to make educated guesses-on what's the next best hypothesis to try from a vast pool of conceivable collections-by autonomously learning new realities from the data through d 0 p x q . Classical inference, on the other hand, mainly deals with the confirmatory or predictive side of data analysis, not hypotheses generation and discovery.
D4 Modeling surprise, not the full data . AIM searches for patterns in the 'unexplained rest'-the parts of the data that were left unexplained by the existing theory. Notice that we are not blindly searching for patterns in the full data; we are only focusing on the novel parts of the data that contain new information. It is important to distinguish between these two aspects. Our goal is to accelerate discovery by synthesizing a simple explanatory model p d p u ; F 0 , F q for the surprising phenomena.
D5 Information-filtering unit . The density-sharpening kernel acts as a filter that discards redundant information and compactly summarizes the new information (knowledge-gap) as a probability density function. 22 The non-zero LP-coefficients of p d p u ; F 0 , F q identify the missing elements of reality in the current theoretical model. For example, Eq. 23 implies that the Laplace law is misspecified in terms of symmetry (3rd order) and long-tailedness (4th order); also check the 11th row of the LP-map shown in Fig. 3. Standard statistical learning methods don't have any such capabilities.
22 As Herbert Simon said: 'Anything that gives us new knowledge gives us an opportunity to be more rational.' From that perspective, AIM could be a powerful tool to guide economic agents in making rational decisions under uncertainty. More details can be found in Mukhopadhyay (2022b).
4. Model-editing . AIM fills the knowledge-gaps by revising initial probability model based on the principle of density-sharpening, which can be described by a simple logical formula:
<details>
<summary>Image 6 Details</summary>

### Visual Description
Icon/Small Image (919x57)
</details>
Every successive iteration of the above procedure generates a more realistic model than its predecessors. Here the density-sharpening kernel d 0 p x q represents the progress in our understanding, which makes the hypothesized simplified model elastic enough to be adaptable for real-data. 23
By executing (29), AIM designs a class of most pursuitworthy alternative models for the data and selects the best one using the 'law of lazy update.' 24 Eq. 25 shows the sharp-Laplace model for study #11, also displayed in the bottom of Fig. 5. The parsimonious d 0 p x q keeps the final model 'sophisticatedly simple' 25 by smoothly extending the hypothesized Laplace model to explain the data.
D6 AIM Curve-fitting . One of the non-standard aspects of AIM is that it's not about building fancy empirical models starting from a clean slate-it's about building a statistical structure on top of the already existing scientific knowledge base to advance the current theory. 26 In doing so, it provides efficient ways of handling an idealized simple model for discovering new knowledge from complex real-world data.
D7 Conservative-liberal coalition . Note that the derived sharp-probabilistic law (e.g., eq. 25) combines the generality (generic features) of Laplace's laws of error with the specificity (stylized features) of Peirce's data. This coalition of conservative (sticking to current dogma) and liberal (openness to course correction when necessary) ideologies makes our data modeling philosophy stands out from traditional statistical and machine learning data-fitting methods.
23 In other words, we don't believe in the 'one-fits-all' model. Our goal is to provide economists with a systemic principle for iteratively revising their preliminary models by confronting them with real-world data.
24 It is fundamentally different from model selection or multiple hypothesis testing, which deals with a pre-determined set of alternative models. Model discovery and model selection are two very different things.
25 Arnold Zellner (2007): 'a much heavier emphasis on sophisticated simplicity in econometrics is needed.' 26 In more simple terms, AIM = Learning from data by standing on the foundation of existing knowledge.
## 9. AI = ABDUCTIVE INTELLIGENCE
When can we say a model is behaving intelligently? This is no easy question. However, at least part of the answer, I believe, lies in inspecting how the model reacts to surprise and adapts to changes. An intelligent model should not be 'brittle,' which collapses all of a sudden upon encountering surprises from the data. The model should have an 'internal' mechanism that help it rise to the occasion by providing recommendations for how to put together incomplete pre-existing knowledge (encoded in model-0) with the data. We refer to this core intellectual component of any learning problem as 'abductive intelligence.'
Building models that are capable of improving themselves has been a dream of computer scientists since the inception of the artificial intelligence field in 1956. It was at the top of the agenda in the proposal written for the Dartmouth Summer Research Project on artificial intelligence:
' Probably a truly intelligent machine will carry out activities which may best be described as self-improvement. ' -John McCarthy et al. (1955)
More than developing new ways of building data models, we need new principles for sharpening an existing model's infrastructure. Such a model, equipped with self-improving capability, then gradually acquires more knowledge about the environment by building increasingly refined models of reality.
'Once we have devised programs with a genuine capacity for self-improvement a rapid evolutionary process will begin. As the machine improves both itself and its model of itself, we shall begin to see all the phenomena associated with the terms 'consciousness,' 'intuition' and 'intelligence' itself.' -Marvin Minsky (1966)
Remark 14 (Intelligence of a Model) . A model's 'intelligence' is its capacity to change and remodel itself when confronted with new data. Any model which is not capable of 'selfimproving' is a disposable, dead model.
Remark 15 (Designing an Intelligent Model) . Model is a work in progress; there is no such thing as the 'final model.' The important part is knowing how to expand the knowledge base by sharpening yesterday's version. With that being said, the focus of present-day machine learning has primarily been on developing a good subordinate-model f 0 p x q but not so much on designing the supervisory-model d 0 p x q . To achieve the goal of designing intelligent machines, it seems inevitable that we have to shift our attention to the 'supervisory' part of the modelthat which knows how to react to surprise in order to evolve to its next avatar. In the long run, the durability of a model depends more on its skill to adapt than its built-in skill . And to design such self-improving models, we will need to instill 'abductive intelligence' in the existing machine learning systems-which is the goal of AIM .
## 10. PEIRCE: AN EXPLORER UPON UNTRODDEN GROUND
I was an explorer upon untrodden ground - C. S. Peirce (1902)
Bertrand Russell (1959) described Charles Sanders Peirce as 'one of the most original minds of the later nineteenth century, and certainly the greatest American thinker ever.' He was a craftsman of the highest order, who made some eminent contributions to the development of nineteenth-century American Statistics. Peirce analyzed his 1872 experimental data in the paper 'On the theory of errors of observation'-which is a gold mine of ideas. His techniques and philosophy of data analysis reported in the paper were a testament to his brilliance as a master applied statistician. On the landmark occasion of 150th anniversary of his famous 1872 study, 27 we have looked back at his views on empirical modeling. The current article offers a framework that embraces and operationalizes the Peircean view of discovery and statistical modeling. We called this framework AIM -Abductive Inference Machine-which is grounded in the principle of density sharpening and a new class of models called 'dyadic models.' We
27 A miraculous year: In 1872, exactly the same year of Peirce's experiment, Ludwig Boltzmann established the probabilistic (statistical) foundation of the entropy function-the birth of modern information theory. As we have seen in this article, Peircean abduction and information theory are intimately connected through the concept of density-sharpening. As a matter of fact, AIM stands on three pillars: Abductive inference + information theory + density-sharpening law.
have illustrated the key algorithmic steps and philosophical aspects of our modeling approach using Peirce's 1872 experimental data to reveal new insights on the probabilistic nature of measurement uncertainties.
## STATEMENTS AND DECLARATIONS
The Author declares that there is no conflict of interest/competing interests.
## ACKNOWLEDGEMENT
The author was benefited from conversations and/or correspondence with James Heckman, Burton Singer, and Stephen Stigler. We also thank the editorial board for their thoughtful and philosophical comments on the manuscript.
2022 marks the 150th anniversary of C. S. Peirce's historic experiment-which according to Stigler (1978) is one of the most significant statistical investigations in the history of nineteenth-century American mathematical research. This paper celebrates this landmark occasion by introducing a modern approach to Peircean abduction, which is readily applicable in practice.
## REFERENCES
- Bailey, D. C. (2017). Not normal: the uncertainties of scientific measurements. Royal Society open science 4 (1), 160600.
- Box, G. (2001). Statistics for discovery. Journal of Applied Statistics 28 (3-4), 285-299.
- Box, G. E. (1976). Science and Statistics. Journal of the American Statistical Association 71 (356), 791-799.
- Buansing, T. T., A. Golan, and A. Ullah (2020). An information-theoretic approach for forecasting interval-valued sp500 daily returns. International Journal of Forecasting 36 (3), 800-813.
- Burch, R. and K. A. Parker (2022). Charles Sanders Peirce. In E. N. Zalta (Ed.), The Stanford Encyclopedia of Philosophy (Summer 2022 ed.). Stanford University.
- Crease, R. P. (2009). Charles Sanders Peirce and the first absolute measurement standard. Physics Today 62 (12), 39.
- Golan, A. (2018). Foundations of info-metrics: Modeling, inference, and imperfect information . Oxford University Press.
- Haavelmo, T. (1944). The probability approach in econometrics. Econometrica: Journal of the Econometric Society , iii-115.
- Hanson, N. R. (1965). Patterns of discovery: An inquiry into the conceptual foundations of science . CUP Archive.
- Heckman, J. J. and B. Singer (2017). Abducting economics. American Economic Review 107 (5), 298-302.
- Jaynes, E. T. (1957). Information theory and statistical mechanics. Physical review 106 (4), 620.
- Laplace, P. S. (1774). M´ emoire sur la probabilit´ e de causes par les ´ evenements. M´ emoire de l'acad´ emie royale des sciences .
- Lee, T.-H., M. Y. Mao, and A. Ullah (2021). Maximum entropy analysis of consumption-based capital asset pricing model and volatility. Journal of Econometric Methods 10 (1), 1-19.
- Maasoumi, E. (1993). A compendium to information theory in economics and econometrics. Econometric reviews 12 (2), 137-181.
- Mao, Y., A. Ullah, et al. (2020). Information theoretic estimation of econometric functions. Forthcoming in Advances in Info-Metrics: Information and Information Processing across Disciplines .
- McCarthy, J., M. L. Minsky, N. Rochester, and C. E. Shannon (1955). A proposal for the Dartmouth Summer Research Project on Artificial Intelligence. Online: http://wwwformal.stanford.edu/jmc/history/dartmouth.pdf.
- Minsky, M. (1966). Artificial intelligence. Scientific American, 215 (3), 257.
- Mukhopadhyay, S. (2017). Large-scale mode identification and data-driven sciences. Electronic Journal of Statistics 11 (1), 215-240.
- Mukhopadhyay, S. (2022a). A maximum entropy copula model for mixed data: Representation, estimation, and applications. in press, arXiv:2203.03040 , 1-35.
- Mukhopadhyay, S. (2022b). Modelplasticity and abductive decision making. Technical Report, arXiv:2203.03040 , 1-27.
- Mukhopadhyay, S. and D. Fletcher (2018). Generalized empirical Bayes modeling via frequentist goodness-of-fit. Nature: Scientific Reports 8 (9983), 1-15.
- Mukhopadhyay, S. and E. Parzen (2020). Nonparametric universal copula modeling. Applied Stochastic Models in Business and Industry, special issue on 'Data Science' 36 (1), 77-94.
- Parkes, D. C. and M. P. Wellman (2015). Economic reasoning and artificial intelligence. Science 349 (6245), 267-272.
- Peirce, C. (1902). Minute logic, Chapter I. Intended characters of this treatise. Digital Companion to CS Peirce .
- Peirce, C. S. (1873). On the theory of errors of observation. Report of the Superintendent of the U.S. Coast Survey , 200-224.
- Peirce, C. S. (1901). The proper treatment of hypotheses: A preliminary chapter, toward an examination of hume's argument against miracles, in its logic and in its history. MS 692 , 890-904.
- Peirce, C. S. (1931-58). The collected papers of Charles Sanders Peirce, eds. C Hartshorne, P Weiss (vols. 1-6) and A Burks (vols. 7-8), Cambridge, MA: Harvard University Press, 1931-58 and 1960-66 .
- Peirce, C. S. (2009). Writings of Charles S. Peirce: a chronological edition, volume 3: 18721878 , Volume 3. Indiana University Press.
- Rao, C. R. (2001). Statistics: Reflections on the past and visions for the future. Communications in Statistics-Theory and Methods 30 (11), 2235-2257.
- Russell, B. (1959). Wisdom of the West, a Historical Survey of Western Philosophy in Its Social and Political Setting . Garden City, NY: Doubleday.
- Simon, H. A. (1988). The science of design: Creating the artificial. Design Issues , 67-82.
- Stigler, S. M. (1978). Mathematical statistics in the early states. The Annals of Statistics , 239-265.
- Tukey, J. W. (1969). Analyzing data: Sanctification or detective work? American Psychologist 24 (2), 83.
- Tukey, J. W. (1972). Exploratory data analysis: As part of a larger whole. In Proceedings of the 18th conference on design of experiments in Army research and development I. Washington, DC , Volume 1010.
- Tukey, J. W. (1977). Exploratory data analysis , Volume 2. Reading, Mass.
- Wilson, E. B. and M. M. Hilferty (1929). Note on C. S. Peirce's experimental discussion of the law of errors. Proceedings of the National Academy of Sciences of the United States of America 15 (2), 120.
- Zellner, A. (2007). Philosophy and objectives of econometrics. Journal of Econometrics 136 (2), 331-339.