## Parallel Neural Networks in Golang
Daniela Kalwarowskyj and Erich Schikuta
University of Vienna
Faculty of Computer Science, RG WST A-1090 Vienna, Währingerstr. 29, Austria dkalwarowskyj@yahoo.com erich.schikuta@univie.ac.at
Abstract. This paper describes the design and implementation of parallel neural networks (PNNs) with the novel programming language Golang. We follow in our approach the classical Single-Program Multiple-Data (SPMD) model where a PNN is composed of several sequential neural networks, which are trained with a proportional share of the training dataset. We used for this purpose the MNIST dataset, which contains binary images of handwritten digits. Our analysis focusses on different activation functions and optimizations in the form of stochastic gradients and initialization of weights and biases. We conduct a thorough performance analysis, where network configurations and different performance factors are analyzed and interpreted. Golang and its inherent parallelization support proved very well for parallel neural network simulation by considerable decreased processing times compared to sequential variants.
Keywords: Backpropagation Neuronal Network Simulation · Parallel and Sequential Implementation · MNIST · Golang Programming Language
## 1 Introduction
When reading a letter our trained brain rarely has a problem to understand its meaning. Inspired by the way our nervous system perceives visual input, the idea emerged to write a mechanism that could 'learn' and furthermore use this 'knowledge' on unknown data. Learning is accomplished by repeating exercises and comparing results with given solutions. The neural network studied in this paper uses the MNIST dataset to train and test its capabilities. The actual learning is achieved by using backpropagation. In the course of our research, we concentrate on a single sequential feed forward neural network (SNN) and upgrade it into building multiple, parallel learning SNNs. Those parallel networks are then fused to one parallel neural network (PNN). These two types of networks are compared on their accuracy, confidence, computational performance and learning speed, which it takes those networks to learn the given task.
The specific contribution of the paper is twofold: on the one hand, a thorough analysis of sequential and parallel implementations of feed forward neural
network respective time, accuracy and confidence, and on the other hand, a feasibility study of Golang [9] and its tools for parallel simulation.
The structure of the paper is as follows: In the next section, we give a short overview of related work. The parallelization approach is laid out in section 4 followed by the description of the Golang implementation. A comprehensive analysis of the sequential and parallel neural networks respective accuracy, confidence, computational performance and learning speed is presented in section 5. Finally, the paper closes with a summary of the findings.
## 2 Related Work and Baseline Research
Artificial neural networks and their parallel simulation gained high attention in the scientific community. Parallelization is a classic approach for speeding up execution times and exploiting the full potential of modern processors. Still, not every algorithm can profit from parallelization, as the concurrent execution might add a non-negligible overhead. This can also be the case for data parallel neural networks, where accuracy problems usually occur, as the results have to be merged.
In the literature a huge number of papers on parallelizing neural networks can be found. An excellent source of references is the survey by Tal Ben-Nun and Torsten Hoefler [1]. However, only few research was done on using Golang in this endeavour.
In the following only specific references are listed, which influenced the presented approach directly. The authors of [8] presented a parallel backpropagation algorithm dealing with the accuracy problem only by using a MapReduce and Cascading model. In the course of our work on parallel and distributed systems [16,2,14] we developed several approaches for the parallelization of neural networks. In [6], two novel parallel training approaches were presented for face recognizing backpropagation neural networks. The authors use the OpenMP environment for classic CPU multithreading and CUDA for parallelization on GPU architectures. Aside from that, they differentiated between topological data parallelism and structural data parallelism [15], where the latter is focus of the presented approach here. [10] gave a comparison of different parallelization approaches on a cluster computer. The results differed depending on the network size, data set sizes and number of processors. Besides parallelizing the backpropagation algorithm for training speed-up, alternative training algorithms like the Resilient Backpropagation described in [13] might lead to faster convergence. One major difference to standard backpropagation is that every weight and bias has a different and variable learning rate. A detailed comparison of both network training algorithms was given in [12] in the case of spam classification.
## 3 Fundamentals
In the following we present the mathematical fundamentals of neural networks to allow for easier understanding and better applicability of our implementation approach described afterwards.
Forwardpropagation To calculate an output in the last layer, the input values need to get propagated through each layer. This process is called forward propagation and is done by applying an activation function on each neuron's corresponding input sum. The input sum z for a neuron k in the layer l is the sum of each neuron's activation a from the last layer multiplied with the weight w :
$$z _ { k } ^ { l } = \sum _ { j } ( w _ { k j } ^ { l } a _ { j } ^ { l - 1 } + b _ { k } ^ { l } ) \quad ( 1 )$$
The additional term + b stands for the bias value, which allows the activation function to be shifted to the left or to the right. For better readability, the input sums for a whole layer can be stored in a vector z and defined by:
$$z ^ { l } = W ^ { l } x ^ { l - 1 } + b ^ { l } \quad ( 2 )$$
Here, W l is a weight matrix storing all weights to layer x l . To obtain the output of a layer, or, in case of the last layer x L , the output of a neural network, an activation function ϕ needs to be applied:
$$x ^ { l } = \varphi ( z ^ { l } ) = \varphi ( W ^ { l } x ^ { l - 1 } + b ^ { l } ) \quad ( 3 )$$
Activation functions do not have to be unique in a network and can be combined. The implementation presented in this paper uses the rectifier activation function
$$\varphi _ { r e c t i f i e r } ( z ) = \begin{cases} 0 & i f z < 0 \\ z & i f z \geq 0 \end{cases} ( 4 )$$
for hidden neurons and the softmax activation function
$$\varphi _ { s o f t \max } ( z _ { i } ) = \frac { e ^ { z _ { i } } } { \sum _ { j } e ^ { z _ { j } } } \quad ( 5 )$$
for output neurons. For classification, each class is represented by one neuron in the last layer. Due to the softmax function, the output values of those neurons sum up to 1 and can therefore be seen as the probabilities of being that class.
Backpropagation For proper classification the network has to be trained beforehand. In order to do that, a cost function tells us how well the network performs, like the cross entropy error with expected outputs e and actual outputs x ,
$$C = - \sum _ { i } e _ { i } \log ( x _ { i } ) & & ( 6 )$$
The aim is to minimize the cost function by finding the optimal weights and biases with the gradient descent optimization algorithm. Therefore, a training instance gets forward propagated through the network to get an output. Subsequently, it is necessary to compute the partial derivatives of the cost function with respect to each weight and bias in the network:
$$\frac { \partial C } { \partial w _ { k j } } = \frac { \partial C } { \partial z _ { k } } \frac { \partial z _ { k } } { \partial w _ { k j } }$$
$$\frac { \partial C } { \partial b _ { k } } = \frac { \partial C } { \partial z _ { k } } \frac { \partial z _ { k } } { \partial b _ { k j } }$$
As a first step, ∂C ∂z k needs to be calculated for every neuron k in the last layer L :
$$\delta _ { k } ^ { L } = \frac { \partial C } { \partial z _ { k } ^ { L } } = \frac { \partial C } { \partial x _ { k } ^ { L } } \varphi ^ { \prime } ( z _ { k } ^ { L } )$$
In case of the cross entropy error function, the error signal vector δ of the softmax output layer is simply the actual output vector minus the expected output vector:
$$\delta ^ { L } = \frac { \partial C } { \partial z ^ { L } } = x ^ { L } - e ^ { L } & & ( 1 0 )$$
To obtain the errors for the remaining layers of the network, the output layer's error signal vector δ L has to be propagated back through the network, hence the name of the algorithm:
$$\delta ^ { l } = ( W ^ { l + 1 } ) ^ { T } \delta ^ { l + 1 } \odot \varphi ^ { \prime } ( z ^ { l } ) \quad ( 1 1 )$$
( W l +1 ) T is the transposed weight matrix, denotes the Hadamard product or entry-wise product and ϕ ′ is the first derivative of the activation function.
Gradient Descent Knowing the error of each neuron, the changes to the weights and biases can be determined by
$$\Delta w _ { k j } ^ { l } = - \eta \frac { \partial C } { \partial w _ { k j } ^ { l } } = - \eta \delta _ { k } ^ { l } x _ { j } ^ { l - 1 } \quad ( 1 2 )$$
$$\Delta b _ { k } ^ { l } = - \eta \frac { \partial C } { \partial b _ { k } } = - \eta \delta _ { k } ^ { l }$$
The constant η is used to regulate the strength of the changes applied to the weights and biases and is also referred to as the learning rate, x l -1 j stands for the output of the j th neuron from layer l -1 . The changes are applied by adding them to the old weights and biases. Depending on the update frequency, a distinction is made between stochastic gradient descent, batch gradient descent and minibatch gradient descent. In the case of the first-mentioned, the weights and biases are updated after every training instance (by repeating all of the aforementioned steps instance-wise). In contrast, batch gradient descent stands for updating only once after accumulating the gradients of all training samples. Mini-batch gradient descent is a combination of both. The weights and biases are updated after a specified amount, the mini-batch size , of training instances. As with batch gradient descent, the gradients of all instances are averaged before the updates.
## 4 Parallel Neuronal Networks
This section describes the technology stack, the parallelization model and implementation details of the provided PNN.
## 4.1 Technology Stack
Go, often referred to as Golang, is a compiled, statically typed, open source programming language developed by a team at Google and released in November 2009. It is distributed under a BSD-style license, meaning that copying, modifying and redistributing is allowed under a few conditions.
As Andrew Gerrand, who works on the project, states in [9], Go grew from a dissatisfaction with the development environments and languages that they were using at Google. It is designed to be expressive, concise, clean and efficient. Hence, Go compiles quickly and is as easy to read as it is to write. This is partly because of gofmt, the go source code formatter, that gives Go programmes a single style and relieves the programmers from discussions like where to set the braces. As uniform presentation makes code easier to read and therefore to work on, gofmt also saves time and affects the scalability of programming teams [11]. The integrated garbage collector offers another great convenience and takes away the time consuming efforts on memory allocation and freeing known from C/C++. Despite the known overhead and criticism about Java's garbage collector, the author of [11] claims that Go is different, more efficient and that it is almost essential for a concurrent language like Go because of the trickiness that can result from managing ownership of a piece of memory as it is passed around among concurrent executions. That being said, built-in support for concurrency is one of the most interesting aspects of Go, offering a great advantage over older languages like C++ or Java. One major component of Go's concurrency model are goroutines, which can be thought of as lightweight threads with a negligible overhead, as the cost of managing them is cheap compared to threads. If a goroutine blocks, the runtime automatically moves any blocking code away from being executed and executes some code that can run, leading to highperformance concurrency [9]. Communication between goroutines takes place over channels, which are derived from "Communicating Sequential Processes" found in [5]. A Channel can be used to send and receive messages from the type associated with it. Since receiving can only be done when something is being sent, channels can be used for synchronization, preventing race conditions by design.
Another difference to common object oriented programming languages can be found in Go's object oriented design. Its approach misses classes and type-based inheritance like subclassing, meaning that there is no type hierarchy. Instead, Go features polymorphism with interfaces and struct embedding and therefore encourages the composition over inheritance principle. An Interface is a set of methods, which is implemented implicitly by all data types that satisfy the interface [11].
For the rest, files are organized in packages, with every source file starting with a package statement. Packages can be used by importing them via their unique path. If a package path in the form of an URL refers to a remote repository, the remote package can be fetched with the go get command and subsequently imported like a local package. Additionally, Go will not compile, if unused packages are being imported.
## 4.2 Parallelization Model
For the parallelization of neural network operations we apply the classical SingleProgram Multiple-Data (SPMD) approach well known from high-performance computing [3]. It is a programming technique, where several tasks execute the same program but with different input data and the calculated output data is merged to a common result. Thus, based on the fundamentals of single feed forward neural network we generate multiple of these networks and set them up to work together in parallel manner.
Fig. 1. Design of a Parallel Neural Network
<details>
<summary>Image 1 Details</summary>

### Visual Description
## Diagram: Hierarchical Neural Network Architecture with MNIST Dataset
### Overview
The diagram illustrates a hierarchical neural network architecture connected to the MNIST dataset. It consists of four Fully Connected Neural Networks (FNNs) arranged vertically, with the topmost FNN labeled "FNN" and three additional FNNs below it. Arrows indicate data flow from the MNIST dataset upward through the FNNs. The structure suggests a multi-stage processing pipeline.
### Components/Axes
- **Top Block**: Labeled "FNN" (Fully Connected Neural Network), containing interconnected nodes represented by circles and lines.
- **Middle Blocks**: Three identical FNN blocks, each labeled "FNN," with identical internal node structures.
- **Bottom Block**: Labeled "MNIST Dataset," depicted as a horizontal rectangle.
- **Arrows**: Dashed lines connect the MNIST dataset to the three middle FNNs, and solid arrows connect the middle FNNs to the top FNN.
- **No axes, scales, or legends** are present in the diagram.
### Detailed Analysis
- **FNN Structure**: Each FNN block contains multiple layers of interconnected nodes (circles) with dense interconnections (lines), typical of fully connected layers in neural networks.
- **Data Flow**:
- The MNIST dataset feeds into the three middle FNNs via dashed arrows.
- The outputs of the three middle FNNs converge into the top FNN via solid arrows.
- **No numerical values, categories, or sub-categories** are explicitly labeled in the diagram.
### Key Observations
- The hierarchical arrangement implies a cascading processing model, where lower-level FNNs extract features from the MNIST data, and higher-level FNNs refine or classify these features.
- The use of dashed arrows for input connections and solid arrows for output connections may indicate different stages of processing (e.g., training vs. inference).
- The identical structure of the three middle FNNs suggests parallel processing or redundancy in feature extraction.
### Interpretation
This diagram represents a multi-stage neural network architecture designed for processing the MNIST dataset, a collection of handwritten digits commonly used for benchmarking machine learning models. The hierarchical structure implies:
1. **Feature Hierarchy**: Lower FNNs (closer to the dataset) likely learn basic features (e.g., edges, strokes), while higher FNNs learn abstract representations (e.g., digit shapes).
2. **Ensemble or Redundancy**: The three middle FNNs may act as parallel feature extractors, with their outputs aggregated in the top FNN for final classification.
3. **Training Pipeline**: The dashed arrows could represent data flow during training, while solid arrows might indicate inference paths.
The absence of explicit numerical values or labels for layer sizes (e.g., number of neurons) limits quantitative analysis. However, the diagram emphasizes the conceptual flow of information through a cascading neural network structure, a common approach in deep learning for hierarchical feature learning.
</details>
The parallel-design is visualized in figure 1. On the bottom it shows the dataset which is divided into as many slices as there are networks, referred to as child-networks (CN). Each child-network learns only a slice of the dataset. Ultimately the results of all parallel child-networks are merged to one final parallel
neural network (PNN). The combination of those CNs can be done in various ways. In the presented network the average of all weights, calculated by each parallel CN by a set number of epochs, is used for the PNNs weights. For the biases the same procedure is used, e.g. averaging all biases for the combined biases value.
In Golang it is important to take into consideration that a program, which is designed parallel does not necessarily work in a parallel manner, as a concurrent program can be parallel, but doesn't have to be. This programming language offers a goroutine, which 'is a function executing concurrently with other goroutines in the same address space' and processes with Go runtime. To start a goroutine a gofunc is called. It can an be equipped with a WaitGroup, that ensures that the process does not finish until all running processes are done. More about the implementation is explained in the next section.
## 4.3 Implementation Details
The main interface to which any trainable network binds is the TrainableNetwork interface. This interface is used throughout the whole learning and testing process. Parallel - as well as simple neural networks implement this interface. This allows for easy and interchangeable usage of both network types throughout the code. Due to the fact that a parallel neural network is built from multiple sequential neural networks (SNN) we start with the implementation of an SNN. The provided implementation of an SNN allows for a flexible network structure. For example, the number of layers and neurons, as well as the activationfunctions used on a layer, can be chosen freely. All information, required for creating a network is stored within a NeuroConfig struct on a network instance. These settings can easily be adjusted in a configuration file, the default name is config.yaml , located in the same directory as the executable.
A network is built out of layers. A minimal network is at least composed of an input layer and an output layer. Beyond this minimum, the hidden depth of a network can be freely adjusted by providing a desired number of hidden layers. Internally layers are represented by the NeuroLayer struct. A layer holds weights and biases which are represented by matrices. The Gonum package is used to simplify the implementation. It provides a matrix implementation as well as most necessary linear algebraic operations.
In the implementation, utility functions are provided for a convenient creation of new layers with initialized weights and biases. The library rand offers a function NormFloat 64 , where the variance is set 1 and the mean 0 as default. Weights are randomly generated using that normal distribution seeded by the current time in nanoseconds.
The provided network supports several activation functions. The activation function is defined on a per layer basis which enables the use of several activations within one network.
A PNN is a combination of at least two SNN. The ParallelNetwork struct represents the PNN in the implementation. As SNNs are trained individually before being combined with the output network of a PNN, it is necessary to
keep the references to the network managed in a slice. In the context of a PNN the SNNs are referred to as child networks (CN).
In a PNN the training process is executed on all CNs in parallel using goroutines. First, the dataset is split according to the amount of CNs. Afterwards, the slices of the training dataset and CNs are called with a goroutine. The goroutine executes minibatches of every CN in parallel. Within those minibatches, another mutexed concurrent goroutine is started for forwarding and backpropagating. Installing a mutex ensures safe access of the data over multiple goroutines.
The last step of training is to combine those CNs to one PNN. The provided network uses as combination function the "average" approach. After training the CNs for a set number of epochs, weights, and biases are added onto the PNN. Ultimately these weights and biases are scaled by the number of CNs. The result is the finished PNN.
## 5 Performance Evaluation
At first a test with one PNN, consisting of 10 CNs, and an SNN are tested using different activation functions on the hidden layer, while always using the softmax function on the output layer. After deciding on an activation function, network configurations are tested. While the number of neurons is only an observation, but not thoroughly tested, the number of networks is evaluated on different sized PNNs. Finally, the performance of both types of networks are compared upon time, accuracy, confidence and costs.
## 5.1 MNIST Dataset
For our analysis, we use the MNIST dataset which holds handwritten numbers and allows supervised learning. Using this dataset the network learns to read handwritten digits. Since learning is achieved by repeating a task, the MNIST dataset has a 'training-set of 60,000 examples, and a test-set of 10,000 examples' [7] . Each dataset is composed of an image-set and a label-set, which holds the information for the desired output and makes it possible to verify the networks output. All pictures are centered and uniform by 28x28 pixels. First, we start the training with the training-set. When the learning phase is over the network is supposed to be able to fulfill its task [8]. To evaluate it's efficiency it is tested by running the neural network with the test-set since the samples of this set are still unknown. It is important to use foreign data to test a network since it is more qualified to show the generalization of a network and therefore its true efficiency. We are aware that MNIST is a rather small data set. However, it was chosen on purpose, because it is used in many similar parallelization approaches and allows therefore for relatively easy comparison of results.
## 5.2 Activation Functions in Single- and Parallel Neuronal Networks
To elaborate which function performes best in terms of accuracy for the coded single- and parallel neural network a test using the same network design and
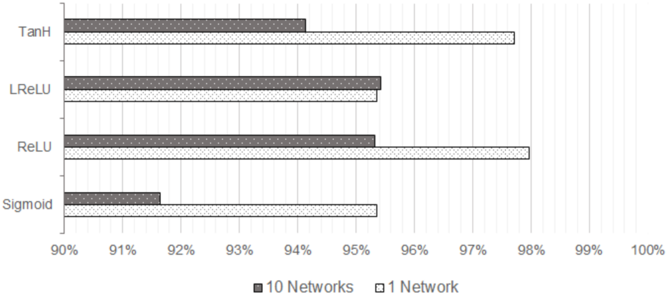
settings for each network is performed while changing only the function used on the hidden layer. Used settings were one hidden layer built out of 256 neurons, working with a batchsize of 50 and a learningrate η of 0.05 and an output layer calculated with softmax. This is used on a single FNN and a PNN each consisting of 10 child-networks. Figure 2 presents the performance results of the activation functions. Each networks setup is one hidden layer on which either the tangent hyperbolic-, leaky ReLU-, ReLU- or sigmoid-function was applied.
Fig. 2. Compare Accuracy of a parallel- vs simple-NN with different activation functions and a softmax function for the output layer. The networks have one hidden layer with 256 neurons and the training was performed with a learningrate of 0.05 and a batchsize of 50 over 20 epochs.
<details>
<summary>Image 2 Details</summary>
### Visual Description
## Bar Chart: Activation Function Performance Comparison
### Overview
The chart compares the performance of four activation functions (TanH, LReLU, ReLU, Sigmoid) across two network configurations: "10 Networks" (gray bars) and "1 Network" (white bars). Performance is measured as a percentage, with values ranging from 90% to 100%.
### Components/Axes
- **Y-Axis**: Activation functions (TanH, LReLU, ReLU, Sigmoid), ordered top to bottom.
- **X-Axis**: Percentage scale from 90% to 100%, with gridlines at 1% intervals.
- **Legend**: Located at the bottom center. Gray = "10 Networks", White = "1 Network".
- **Bars**: Horizontal bars for each activation function, differentiated by color.
### Detailed Analysis
1. **TanH**:
- **10 Networks (Gray)**: Approximately 94%.
- **1 Network (White)**: Approximately 97.5%.
2. **LReLU**:
- **10 Networks (Gray)**: Approximately 95.5%.
- **1 Network (White)**: Approximately 95.5%.
3. **ReLU**:
- **10 Networks (Gray)**: Approximately 95.5%.
- **1 Network (White)**: Approximately 98%.
4. **Sigmoid**:
- **10 Networks (Gray)**: Approximately 91.5%.
- **1 Network (White)**: Approximately 95.5%.
### Key Observations
- **1 Network (White Bars)** consistently outperforms "10 Networks" (Gray Bars) across all activation functions, except LReLU, which shows near-identical performance in both configurations.
- **ReLU** achieves the highest performance in the "1 Network" configuration (98%), while **Sigmoid** has the lowest performance in the "10 Networks" configuration (91.5%).
- The largest performance gap occurs for **Sigmoid** (91.5% vs. 95.5%), suggesting it is less effective in multi-network setups.
### Interpretation
The data suggests that using a single network ("1 Network") generally yields higher performance than scaling across 10 networks. This could indicate that network complexity or resource allocation impacts activation function efficiency. Notably, **ReLU** dominates in the "1 Network" scenario, aligning with its known advantages in deep learning for mitigating vanishing gradients. The near-parity of **LReLU** in both configurations implies robustness to network scaling. Conversely, **Sigmoid**'s significant drop in the "10 Networks" setup highlights potential limitations in multi-network architectures, possibly due to its saturation behavior. These trends underscore the importance of activation function selection in optimizing network performance.
</details>
In this comparison the single neural network that learned using the ReLUfunction, closely followed by TanH-function, has reached the best result within 20 epochs. While testing different configurations it showed that most activation functions reached higher accuracy when using small learning rates. Sigmoid is one function that proved itself to be most efficient when the learningrate is not too small. By raising the learningrate to 0.6 the sigmoid-functions merit grows significantly on both network types. In the process of testing ReLU on hidden layers in combination with Softmax for the output layer has proven to reliably deliver good results. That is why in further sections ReLU has applied on all networks hidden layers and on the output layer Softmax.
## 5.3 Network Configurations
Number of Neurons. Choosing an efficient number of neurons is important, but it is hard to identify. There is no calculation which helps to define an effectively working number or range of neurons for a certain configuration of a
neural network. Varying the number of neurons between 20 to 600 delivered great accuracy. These are only observations and need to be studied with a more sophisticated approach.
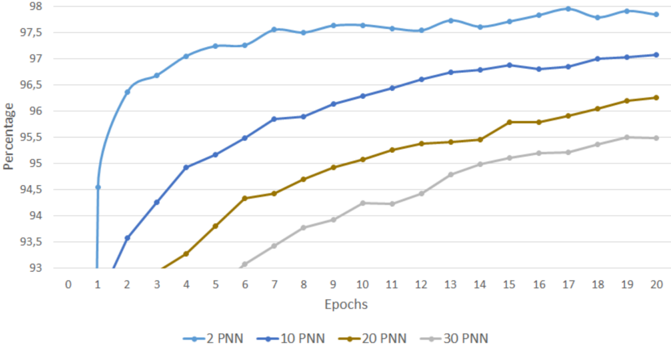
Number of Networks. To evaluate the performance of PNNs in terms of accuracy, PNNs with different amounts of CNs are composed and trained. The training runs over 20 epochs with a learning rate of 0.1 and a batchsize of 50. All CNs are built with one hidden layer consisting of 256 neurons. On the hidden layer the ReLU-function and on the output layer the Softmax-function is used. After every epoch, the networks are tested with the test-dataset. The results are visualized in figure 3.
Fig. 3. Accuracy of PNNs, built with different amount of CNs, over 20 epochs
<details>
<summary>Image 3 Details</summary>
### Visual Description
## Line Chart: Performance of PNN Configurations Over Training Epochs
### Overview
The chart displays the percentage performance of four different PNN (Probabilistic Neural Network) configurations (2 PNN, 10 PNN, 20 PNN, 30 PNN) across 20 training epochs. Performance is measured on a y-axis from 93% to 98%, with epochs on the x-axis from 0 to 20. All lines show upward trends, but with varying rates of improvement.
### Components/Axes
- **X-axis (Epochs)**: Labeled "Epochs," ranging from 0 to 20 in increments of 1.
- **Y-axis (Percentage)**: Labeled "Percentage," ranging from 93% to 98% in increments of 0.5%.
- **Legend**: Located at the bottom, with four lines:
- **Blue**: 2 PNN
- **Dark Blue**: 10 PNN
- **Brown**: 20 PNN
- **Gray**: 30 PNN
### Detailed Analysis
1. **2 PNN (Blue Line)**:
- Starts at **94.5%** at epoch 1.
- Rises sharply to **97.5%** by epoch 2.
- Plateaus between **97.5%–98%** for epochs 3–20.
- *Trend*: Rapid initial improvement, then stabilization.
2. **10 PNN (Dark Blue Line)**:
- Starts at **93.5%** at epoch 1.
- Increases steadily to **96.5%** by epoch 20.
- *Trend*: Consistent linear growth.
3. **20 PNN (Brown Line)**:
- Starts at **93%** at epoch 1.
- Rises to **95.5%** by epoch 20.
- *Trend*: Gradual, steady increase.
4. **30 PNN (Gray Line)**:
- Starts at **93%** at epoch 1.
- Increases to **95.5%** by epoch 20.
- *Trend*: Slow, linear growth.
### Key Observations
- The **2 PNN** configuration achieves the highest performance (97.5–98%) but plateaus early.
- **10 PNN** shows the most sustained improvement, reaching 96.5% by epoch 20.
- **20 PNN** and **30 PNN** have similar final performance (~95.5%) but differ in growth rate (20 PNN improves faster).
- All configurations improve over time, but higher PNN values (2–10) outperform lower values (20–30).
### Interpretation
The chart suggests that **PNN configuration significantly impacts model performance**, with higher PNN values (2–10) achieving better results faster. However, the 2 PNN configuration plateaus early, indicating diminishing returns after initial training. The 20 PNN and 30 PNN lines demonstrate that lower PNN values require more epochs to converge but may stabilize at lower performance levels. This could imply a trade-off between computational efficiency (fewer PNNs) and model accuracy, with optimal performance achieved at mid-range PNN values (e.g., 10 PNN). The data highlights the importance of tuning PNN parameters for specific training goals.
</details>
Figure 3 illustrates a clear loss in accuracy of PNNs with a growing number of CNs. The 94.5% accuracy, for example, is reached by a PNN with 2 CNs after only one epoch, while a PNN with 30 CNs achieves that after 12 epochs. In respect to the number of networks this graph shows that more is not always better. Considering, that this test was only performed over a small number of epochs, it is not possible to read the potential of a PNN with more CNs. To find out how good a PNN can perform, a test was run with three PNNs running 300 epochs:
Table 1 shows a static growth until 200 epochs. After that, there is only a small fluctuation of accuracy, showing that a local minimum has been reached. Over the runtime of 300 epochs the difference of the performance regarding the accuracy of PNNs has been reduced significantly. Still the observation of the ranking of the PNNs has not been changed. The PNNs built out of a smaller
Table 1. Accuracy behaviour for different epochs
| CNs of PNN | Accuracy after... | Accuracy after... | Accuracy after... | Accuracy after... | Accuracy after... | Accuracy after... |
|--------------|------------------------------------------------------------------|------------------------------------------------------------------|------------------------------------------------------------------|------------------------------------------------------------------|------------------------------------------------------------------|------------------------------------------------------------------|
| | 20 Epochs 100 Epochs 150 Epochs 200 Epochs 250 Epochs 300 Epochs | 20 Epochs 100 Epochs 150 Epochs 200 Epochs 250 Epochs 300 Epochs | 20 Epochs 100 Epochs 150 Epochs 200 Epochs 250 Epochs 300 Epochs | 20 Epochs 100 Epochs 150 Epochs 200 Epochs 250 Epochs 300 Epochs | 20 Epochs 100 Epochs 150 Epochs 200 Epochs 250 Epochs 300 Epochs | 20 Epochs 100 Epochs 150 Epochs 200 Epochs 250 Epochs 300 Epochs |
| 2 | 97.76 | 98.08 | 98.13 | 98.16 | 98.14 | 98.17 |
| 10 | 96.58 | 97.43 | 97.96 | 98.03 | 98.09 | 98.05 |
| 20 | 95.69 | 97.50 | 97.71 | 97.92 | 97.90 | 97.97 |
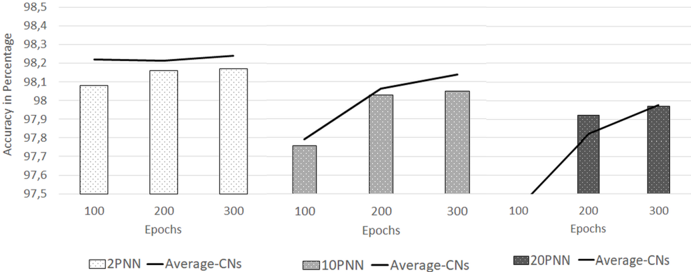
number of CNs perform slightly better. Since the provided PNNs are built by using averaging of weights and biases it also seemed interesting to compare the average accuracy of the CNs with the resulting PNN, to grade the used combination function. The results are illustrated in figure 4.
Fig. 4. Compare the average accuracy of all CNs, out of which the final PNN is formed, with that PNNs accuracy
<details>
<summary>Image 4 Details</summary>
### Visual Description
## Bar Chart: Model Accuracy Across Training Epochs
### Overview
The chart compares the accuracy (in percentage) of three neural network models (2PNN, 10PNN, 20PNN) across training epochs (100, 200, 300). A black line labeled "Average-CNs" overlays the chart, showing a trend across epochs. The y-axis ranges from 97.5% to 98.5%, with bars grouped by epoch and model.
### Components/Axes
- **X-Axis**: Labeled "Epochs," divided into three segments: 100, 200, 300.
- **Y-Axis**: Labeled "Accuracy in Percentage," scaled from 97.5% to 98.5% in 0.1% increments.
- **Legend**: Located at the bottom, with four entries:
- **2PNN**: Light gray bars (hatched).
- **10PNN**: Medium gray bars (hatched).
- **20PNN**: Dark gray bars (hatched).
- **Average-CNs**: Black line (solid).
### Detailed Analysis
#### 2PNN Model
- **100 Epochs**: ~98.1% (light gray bar).
- **200 Epochs**: ~98.2% (light gray bar).
- **300 Epochs**: ~98.2% (light gray bar).
- **Trend**: Stable high accuracy across all epochs.
#### 10PNN Model
- **100 Epochs**: ~97.8% (medium gray bar).
- **200 Epochs**: ~98.1% (medium gray bar).
- **300 Epochs**: ~98.1% (medium gray bar).
- **Trend**: Slight improvement from 100 to 200 epochs, then plateaus.
#### 20PNN Model
- **100 Epochs**: ~97.8% (dark gray bar).
- **200 Epochs**: ~97.9% (dark gray bar).
- **300 Epochs**: ~98.0% (dark gray bar).
- **Trend**: Gradual improvement over epochs.
#### Average-CNs Line
- **100 Epochs**: ~98.2% (black line).
- **200 Epochs**: ~98.0% (black line).
- **300 Epochs**: ~98.1% (black line).
- **Trend**: Slight decrease from 100 to 200 epochs, followed by a minor increase.
### Key Observations
1. **2PNN Dominance**: Consistently achieves the highest accuracy (~98.1–98.2%) across all epochs.
2. **Model Scaling**: 10PNN and 20PNN show lower accuracy than 2PNN but improve with more epochs.
3. **Average-CNs Fluctuation**: The black line suggests a baseline trend, dipping slightly at 200 epochs before recovering.
4. **Hatching Consistency**: All bars use diagonal hatching, with darker shades for higher epoch counts (20PNN > 10PNN > 2PNN).
### Interpretation
The chart demonstrates that the 2PNN model outperforms 10PNN and 20PNN in accuracy, even with fewer epochs. While 10PNN and 20PNN show marginal gains with increased training, their performance remains below 2PNN. The "Average-CNs" line likely represents an aggregated or reference performance, indicating that models generally maintain high accuracy but with variability. The 20PNN model’s gradual improvement suggests that deeper networks (more parameters) may benefit from extended training, though they still lag behind simpler architectures like 2PNN. This could imply a trade-off between model complexity and training efficiency.
</details>
It shows that the efficiency of an average function grows with the number of CNs. The first graph drawn with 2 CNs shows, that the resulting PNN is performing worse than the average of the CNs, it has been built from. By growing the number of CNs to 10, the average of CNs approximates towards the PNN. The last graph of this figure shows that a PNN composed of 20 CNs outperforms the average of its CNs after 200 epochs, and after 300 epochs levels with it. It has to be noted that the differences in accuracy are very small, as it is only a range of 0.1 to 0.2 percent. Overall it can be said that this combination function is working efficiently.
## 5.4 Comparing the Performances
Time. Time is the main reason to have a network working in parallel. To test the effect of parallelism on the time required to train a PNN, the provided neuronal
network is tested on three systems. The first system is equipped with 4 physical and 4 logical cores, an Intel i7-3635QM processor working with a basic clock rate of 2.4GHz, the second system holds 6 physical cores and 6 logical cores working with 2.9GHz and an Intel i9-8950HK processor and last the third system works with an AMD Ryzen Threadripper 1950X with 16 physical and 16 logical cores, which work with a clock rate of 3.4GHz. The first, second and third systems are referred to as 4 core, 6 core and 16 core in the following.
Fig. 5. Time in seconds, that was needed to train a PNN with a limited amount of one Goroutine per composed CN.
<details>
<summary>Image 5 Details</summary>
### Visual Description
## Bar Chart: Execution Time by Goroutines and Core Counts
### Overview
The chart compares execution time (in seconds) across different numbers of Goroutines (1, 2, 4, 6, 8, 12, 16, 32, 64) for three core configurations: 4 cores (white), 6 cores (gray), and 16 cores (black). Execution time decreases as Goroutines increase, with 16 cores consistently outperforming 4 and 6 cores.
### Components/Axes
- **X-axis (Goroutines)**: Labeled "Goroutines" with values: 1, 2, 4, 6, 8, 12, 16, 32, 64.
- **Y-axis (Seconds)**: Labeled "Seconds" with a range from 0 to 3000.
- **Legend**: Located on the right, with three entries:
- 4 cores (white)
- 6 cores (gray)
- 16 cores (black)
### Detailed Analysis
- **Goroutine 1**:
- 4 cores: ~2800 seconds
- 6 cores: ~1700 seconds
- 16 cores: ~1900 seconds
- **Goroutine 2**:
- 4 cores: ~1600 seconds
- 6 cores: ~1000 seconds
- 16 cores: ~950 seconds
- **Goroutine 4**:
- 4 cores: ~1050 seconds
- 6 cores: ~500 seconds
- 16 cores: ~480 seconds
- **Goroutine 6**:
- 4 cores: ~1020 seconds
- 6 cores: ~380 seconds
- 16 cores: ~320 seconds
- **Goroutine 8**:
- 4 cores: ~1010 seconds
- 6 cores: ~370 seconds
- 16 cores: ~280 seconds
- **Goroutine 12**:
- 4 cores: ~1005 seconds
- 6 cores: ~360 seconds
- 16 cores: ~240 seconds
- **Goroutine 16**:
- 4 cores: ~1000 seconds
- 6 cores: ~350 seconds
- 16 cores: ~220 seconds
- **Goroutine 32**:
- 4 cores: ~990 seconds
- 6 cores: ~340 seconds
- 16 cores: ~210 seconds
- **Goroutine 64**:
- 4 cores: ~980 seconds
- 6 cores: ~330 seconds
- 16 cores: ~200 seconds
### Key Observations
1. **Inverse Relationship**: Execution time decreases as Goroutines increase for all core configurations.
2. **Core Count Impact**: 16 cores reduce execution time by ~50% compared to 4 cores at Goroutine 1, and by ~60% at Goroutine 64.
3. **Diminishing Returns**: The performance gap between core configurations narrows at higher Goroutine counts (e.g., 4 vs. 16 cores at Goroutine 64: 980 vs. 200 seconds).
### Interpretation
The data demonstrates that increasing both Goroutines and core count improves scalability and reduces execution time. The 16-core configuration achieves near-linear speedup with Goroutine growth, suggesting efficient parallelization. The 4-core configuration shows the highest latency, likely due to resource contention. This chart highlights the importance of core allocation in optimizing concurrent workloads, with 16 cores providing the most significant performance gains across all tested scenarios.
</details>
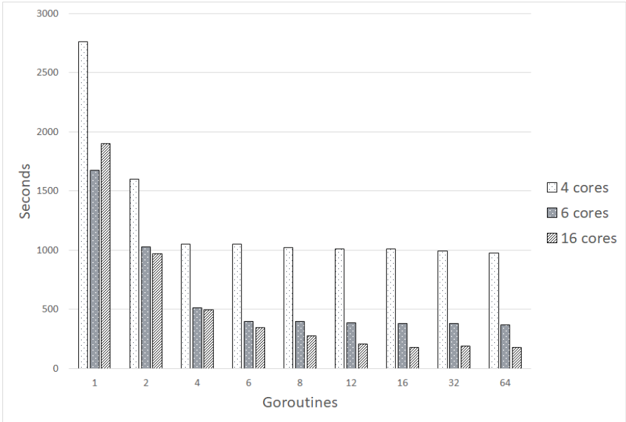
In figure 5 the benefit in terms of time using parallelism is clearly visible. The results illustrated show the average time in seconds needed by each system for training a PNN consisting of one CN per goroutine. For the block diagram in 5 the percental time requirements in comparison with the time needed using one goroutine are listed in table 2.
The time in figure 5 starts on a high level and decreases with an increasing amount of goroutines for all three systems. Especially in the range of 1 to 4 goroutines, a formidable decrease in training time is visible and only starts to level out when reaching a systems physical core limitation. This means that the 4 core starts to level out after 4 goroutines, the 6 core after 6 goroutines and the 16 core after 16 goroutines, even though all systems support hyper threading. After reaching a systems core number the average time necessary for training a neural network decreases further with more goroutines. This should be due to the ability to work in parallel and in concurrency as one slot finishes and a
Table 2. Average time required to train a PNN in comparison to one goroutine, which represents 100 percent
| | Time required compared to 1 goroutine | Time required compared to 1 goroutine | Time required compared to 1 goroutine | Time required compared to 1 goroutine | Time required compared to 1 goroutine | Time required compared to 1 goroutine | Time required compared to 1 goroutine | Time required compared to 1 goroutine | Time required compared to 1 goroutine |
|-------------------|-----------------------------------------|-----------------------------------------|-----------------------------------------|-----------------------------------------|-----------------------------------------|-----------------------------------------|-----------------------------------------|-----------------------------------------|-----------------------------------------|
| System/Goroutines | 1 | 2 | 4 | 6 | 8 | 12 | 16 | 32 | 64 |
| 4 | 100% | 58% | 38% | 38% | 37% | 37% | 37% | 36% | 35% |
| 6 | 100% | 61% | 31% | 24% | 24% | 23% | 23% | 23% | 22% |
| 16 | 100% | 51% | 26% | 18% | 14% | 11% | 9% | 10% | 9% |
waiting thread can start running immediately, without waiting for the rest of the running threads to be finished. All three systems show high time savings by parallelizing the neural networks. While time requirements decreased in every system, the actual time savings differ greatly as the 16 core system decreased 91 percent on average from 1 goroutine to 64 goroutines. In comparison, the 4 core system only took 65 percent less time. As the 16 core system is a lot more powerful than the 4 core system, it can perform an even greater parallel task and therefore displays a positive effect of parallelism upon time requirements. Based upon figure 5 and its table 2 parallelism within neural networks can be seen as a useful feature.
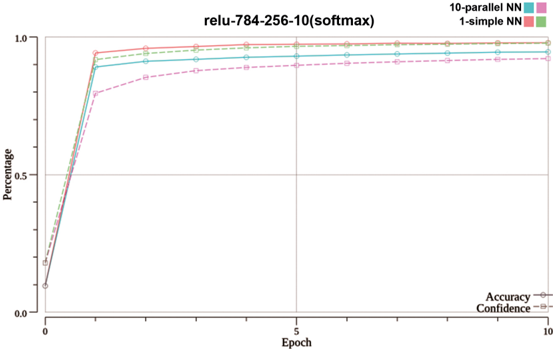
Fig. 6. Compare Accuracy and Confidence of a PNN composed of 10 CNs and an SNN with one Hidden Layer which holds 256 Neurons
<details>
<summary>Image 6 Details</summary>
### Visual Description
## Line Graph: relu-784-256-10(softmax)
### Overview
The image is a line graph comparing the performance of two neural network configurations ("10-parallel NN" and "1-simple NN") over 10 epochs. The y-axis represents "Percentage" (0.0 to 1.0), and the x-axis represents "Epoch" (0 to 10). The graph shows both models achieving near-100% performance by epoch 1, with the 10-parallel NN maintaining a slight edge over the 1-simple NN after this point. The legend is positioned on the right, and the graph includes labels for "Accuracy" and "Confidence," though these lines are not visible in the image.
### Components/Axes
- **Title**: "relu-784-256-10(softmax)"
- **Y-axis**: "Percentage" (0.0 to 1.0, labeled as "Percentage")
- **X-axis**: "Epoch" (0 to 10, labeled as "Epoch")
- **Legend**: Located on the right, with two entries:
- **10-parallel NN**: Blue line with circular markers
- **1-simple NN**: Red line with circular markers
- **Additional Labels**: "Accuracy" and "Confidence" are mentioned in the legend but are not visually present in the graph.
### Detailed Analysis
- **10-parallel NN (Blue Line)**:
- Starts at 0% at epoch 0.
- Rises sharply to 100% by epoch 1.
- Maintains a slight lead over the 1-simple NN after epoch 1, plateauing near 100%.
- Data points are plotted with circular markers.
- **1-simple NN (Red Line)**:
- Starts at 0% at epoch 0.
- Rises sharply to 100% by epoch 1.
- Slightly lags behind the 10-parallel NN after epoch 1, plateauing near 100%.
- Data points are plotted with circular markers.
- **Confidence and Accuracy Lines**:
- Mentioned in the legend but not visible in the graph.
- No data points or trends are discernible for these lines.
### Key Observations
1. Both models achieve 100% performance by epoch 1, indicating rapid convergence.
2. The 10-parallel NN consistently outperforms the 1-simple NN after epoch 1, though the difference is minimal.
3. The plateau after epoch 1 suggests no further improvement in performance with additional epochs.
4. The absence of visible "Confidence" and "Accuracy" lines limits insights into model uncertainty or confidence metrics.
### Interpretation
The graph demonstrates that the 10-parallel neural network configuration achieves slightly higher accuracy than the 1-simple NN, likely due to parallel processing advantages. The rapid convergence to 100% suggests both models are highly effective for the task, but the 10-parallel NN may offer marginal benefits. The plateau after epoch 1 implies that further training does not yield additional gains, which is common in neural networks once optimal performance is reached. The lack of visible "Confidence" and "Accuracy" lines in the graph restricts analysis of model uncertainty or confidence intervals, which could provide deeper insights into the reliability of the results.
**Note**: All textual elements (labels, legends, axis titles) are extracted as described. No other languages are present in the image.
</details>
Accuracy and Confidence of Networks. In this section the performance in terms of accuracy and confidence is compared between a PNNs and an SNN.
For the test, illustrated by figure 6, both types of networks have been provided with the same random network to start their training. They have the exact same built, except that one is trained as SNN and the other is cloned 10 times to build a PNN with 10 CNs.
In figure 6 the SNN performs better than the PNN in both accuracy and confidence. While the SNNs accuracy and confidence overlap after 8 epochs, the PNN has a gap between both lines at all times. This concludes that the SNN is "sure" about its outputs, while the PNN is more volatile. The SNNs curve of confidence is a lot steeper than the PNNs and quickly approximates towards the curve of accuracy. Both curves of accuracy start off almost symmetric upwards the y-axis, but the PNN levels horizontally after about 90 percent while the SNN still rises until about 94 percent. After those points both accuracy curves run almost horizontally and in parallel towards the x-axis. The gap stays constantly until the end of the test. Even small changes within the range of 90 to 100 percent are to be interpreted as significant. This makes the SNN perform considerable more efficient in terms of accuracy and costs than the PNN.
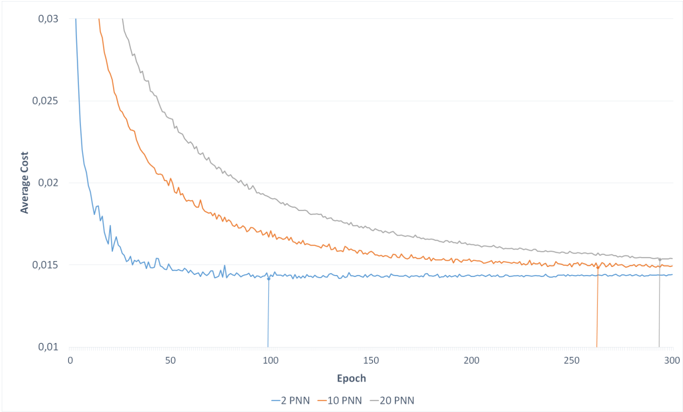
Cost of Networks. To see how successful the training of different PNNs are, the costs of 3 parallel networks with a varying number of CNs have been recorded for 300 epochs. The results are illustrated in figure 7.
Fig. 7. Average Costs of PNNs over 300 epochs. The vertical lines show the lowest cost for each PNN.
<details>
<summary>Image 7 Details</summary>
### Visual Description
## Line Graph: Average Cost vs. Epoch
### Overview
The image depicts a line graph comparing the average cost across three different configurations (2 PNN, 10 PNN, 20 PNN) over 300 epochs. The y-axis represents "Average Cost" (ranging from 0.01 to 0.03), and the x-axis represents "Epoch" (0 to 300). Three distinct lines are plotted, each corresponding to a PNN configuration.
### Components/Axes
- **X-axis (Epoch)**: Labeled "Epoch," with ticks at 0, 50, 100, 150, 200, 250, and 300.
- **Y-axis (Average Cost)**: Labeled "Average Cost," with ticks at 0.01, 0.015, 0.02, 0.025, and 0.03.
- **Legend**: Located at the bottom center, with three entries:
- **Blue line**: 2 PNN
- **Orange line**: 10 PNN
- **Gray line**: 20 PNN
### Detailed Analysis
1. **2 PNN (Blue Line)**:
- Starts at ~0.03 at epoch 0.
- Drops sharply to ~0.015 by epoch 50.
- Remains relatively flat (~0.015) from epoch 100 to 300.
- Minor fluctuations observed between epochs 50–100 (~0.014–0.015).
2. **10 PNN (Orange Line)**:
- Begins at ~0.03 at epoch 0.
- Declines gradually to ~0.015 by epoch 250.
- Stabilizes near ~0.015 by epoch 300.
- Slight dip observed at epoch 250 (~0.0145).
3. **20 PNN (Gray Line)**:
- Starts at ~0.028 at epoch 0.
- Decreases steadily to ~0.015 by epoch 300.
- Slower rate of decline compared to 2 PNN and 10 PNN.
- No significant fluctuations.
### Key Observations
- All three lines converge to a similar average cost (~0.015) by epoch 300, suggesting diminishing returns for higher PNN configurations.
- The 2 PNN configuration achieves the fastest initial cost reduction but plateaus earlier.
- The 20 PNN configuration shows the slowest but most consistent decline.
- No anomalies or outliers are evident beyond expected noise in the data.
### Interpretation
The graph demonstrates that increasing the number of PNNs (from 2 to 20) results in a slower but steadier reduction in average cost over epochs. While the 2 PNN configuration achieves rapid early improvement, it stabilizes at a higher cost than the 10 and 20 PNN configurations by epoch 300. This suggests that higher PNN counts may improve long-term optimization but require more epochs to reach convergence. The convergence of all lines at ~0.015 implies a potential lower bound for the cost metric, regardless of PNN configuration. The data highlights a trade-off between computational efficiency (fewer PNNs, faster initial gains) and long-term performance (more PNNs, gradual but sustained improvement).
</details>
It shows that the costs of all three PNNs sink rapidly within the first 50 epochs. Afterwards, the error decreases slower, drawing a soft curve that flats out towards a line, almost stagnating. Apparently, all PNNs training moves fast towards a minimum at the beginning, then slows down and finally gets stuck, while only moving slightly up and down the minimums borders. Similar to earlier tests, a PNN built with less CNs performs better. More CNs leave the graph further up the y-axis, as the 2-PNN outperforms both the 10- and 20PNN. It also reaches its best configuration, e.g. the point where costs are lowest, significantly earlier than the other tested PNNs. Whereas the 10- and 20-PNNs work out their best performance regarding the costs at a relatively close range of epochs, they reach it late compared to the 2-PNN. Figure 7 clearly shows a decrease in quality with PNNs, formed with more CNs. This indicates that the combination function needs optimization to achieve a better graph. In the long term,F costs behave the same as accuracy. After 300 epochs the difference has almost leveled.
## 6 Findings and Conclusion
This paper presents and analyses PNNs composed of several sequential neural networks. The PNNs are tested upon time, accuracy and costs and compared to an SNN.
The parallelization approach on three different multicore systems show excellent speedup (the time necessary for training a PNN reduces constantly by increasing the number of CNs e.g. number of goroutines).
With all three tested systems the time necessary for training a PNN decreased constantly by increasing the number of CNs e.g. number of goroutines. While the difference in time was significant within the first few added goroutines it leveled out after reaching the systems number of cores. A PNN with 2 CNs takes 40% to 50% less time than a SNN and a PNN with 4 CNs takes 60% to 70% less time.
While time is a strong point of the PNN, accuracy is also dependent on the number of CNs a PNN is formed from. While a few CNs resulted in longer training times it generated better accuracy in fewer epochs. More CNs made the training time faster but the learning process slower. After 20 epochs a PNN composed of 2 CNs reached an accuracy of almost 98%, while a PNN composed of 20 CNs only slightly overcame the 96% line. When both PNNs were trained for a longer period this difference shrank dramatically. Trained for 300 epochs the accuracy only differed by 0.2% in favor of the PNN made out of 2 CNs. While this proved the ability to learn with a small data set it also demonstrated that bigger data sets deliver a better result faster. the PNNs can improve by 0.41% and 2.28% when training for a longer period. These results were achieved by using averaging as combination function. The chances of achieving an even better accuracy by improving the combination function are high. The costs of a PNN also depends on the number of CNs. It has the same behavior as accuracy and can also be improved by an optimized combination function. However, a
thorough analysis on the effects of improved combination functions is planned for future work and is beyond the scope of this paper.
Summing up, PNNs proved to be very time efficient but are still lacking in terms of accuracy. As there are plenty of other optimizations, e.g. adjusting learning rates [4], a PNN proved to be more time efficient than an SNN. However, until the issue of accuracy has been taken care of, the SNN surpasses the PNN in practice.
We close the paper with a final word on the feasibility of Golang for parallel neural network simulation: Data parallelism proved to be an efficient parallelization strategy. In combination with the programming language Go, a parallel neural network implementation is coded as fast as a sequential one, as no special efforts are necessary for concurrent programming thanks to Go's concurrency primitives, which offer a simple solution for multithreading.
## References
1. Ben-Nun, T., Hoefler, T.: Demystifying parallel and distributed deep learning: An in-depth concurrency analysis. ACM Computing Surveys (CSUR) 52 (4), 1-43 (2019)
2. Brezany, P., Mueck, T.A., Schikuta, E.: A software architecture for massively parallel input-output. In: Waśniewski, J., Dongarra, J., Madsen, K., Olesen, D. (eds.) Applied Parallel Computing Industrial Computation and Optimization. pp. 85-96. Springer Berlin Heidelberg, Berlin, Heidelberg (1996)
3. Darema, F.: The spmd model: Past, present and future. In: European Parallel Virtual Machine/Message Passing Interface Users' Group Meeting. pp. 1-1. Springer (2001)
4. Goyal, P., Dollár, P., Girshick, R., Noordhuis, P., Wesolowski, L., Kyrola, A., Tulloch, A., Jia, Y., He, K.: Accurate, large minibatch sgd: Training imagenet in 1 hour. arXiv preprint arXiv:1706.02677 (2017)
5. Hoare, C.A.R.: Communicating sequential processes. In: The origin of concurrent programming, pp. 413-443. Springer (1978)
6. Huqqani, A.A., Schikuta, E., Ye, S., Chen, P.: Multicore and gpu parallelization of neural networks for face recognition. Procedia Computer Science 18 (Supplement C), 349 - 358 (2013), 2013 International Conference on Computational Science
7. LeCun, Y., Bottou, L., Bengio, Y., Haffner, P.: Gradient-based learning applied to document recognition. Proceedings of the IEEE 86 (11), 2278-2324 (1998)
8. Liu, Y., Jing, W., Xu, L.: Parallelizing backpropagation neural network using mapreduce and cascading model. Computational intelligence and neuroscience 2016 (2016)
9. Meyerson, J.: The go programming language. IEEE Software 31 (5), 104-104 (Sept 2014)
10. Pethick, M., Liddle, M., Werstein, P., Huang, Z.: Parallelization of a backpropagation neural network on a cluster computer. In: International conference on parallel and distributed computing and systems (PDCS 2003) (2013)
11. Pike, R.: Go at google: Language design in the service of software engineering. https://talks.golang.org/2012/splash.article (2012), [Online; accessed 06January-2018]
12. Prasad, N., Singh, R., Lal, S.P.: Comparison of back propagation and resilient propagation algorithm for spam classification. In: 2013 Fifth International Conference on Computational Intelligence, Modelling and Simulation. pp. 29-34 (Sept 2013)
14. Schikuta, E., Weishaupl, T.: N2grid: neural networks in the grid. In: 2004 IEEE International Joint Conference on Neural Networks (IEEE Cat. No.04CH37541). vol. 2, pp. 1409-1414 vol.2 (2004)
13. Riedmiller, M., Braun, H.: A direct adaptive method for faster backpropagation learning: The rprop algorithm. In: Neural Networks, 1993., IEEE International Conference on. pp. 586-591. IEEE (1993)
15. Schikuta, E.: Structural data parallel neural network simulation. In: Proceedings of 11th Annual International Symposium on High Performance Computing Systems (HPCS'97), Winnipeg, Canada (1997)
16. Schikuta, E., Fuerle, T., Wanek, H.: Vipios: The vienna parallel input/output system. In: Pritchard, D., Reeve, J. (eds.) Euro-Par'98 Parallel Processing. pp. 953958. Springer Berlin Heidelberg, Berlin, Heidelberg (1998)