# Chain of Code: Reasoning with a Language Model-Augmented Code Emulator
**Authors**: Chengshu Li, Jacky Liang, Andy Zeng, Xinyun Chen, Karol Hausman, Dorsa Sadigh, Sergey Levine, Li Fei-Fei, Fei Xia, Brian Ichter
Abstract
Code provides a general syntactic structure to build complex programs and perform precise computations when paired with a code interpreter - we hypothesize that language models (LMs) can leverage code-writing to improve Chain of Thought reasoning not only for logic and arithmetic tasks (Chen et al., 2022; Nye et al., 2021; Austin et al., 2021), but also for semantic ones (and in particular, those that are a mix of both). For example, consider prompting an LM to write code that counts the number of times it detects sarcasm in an essay: the LM may struggle to write an implementation for “ detect_sarcasm(string) ” that can be executed by the interpreter (handling the edge cases would be insurmountable). However, LMs may still produce a valid solution if they not only write code, but also selectively “emulate” the interpreter by generating the expected output of “ detect_sarcasm(string) ”. In this work, we propose Chain of Code (CoC), a simple yet surprisingly effective extension that improves LM code-driven reasoning. The key idea is to encourage LMs to format semantic sub-tasks in a program as flexible pseudocode that the interpreter can explicitly catch undefined behaviors and hand off to simulate with an LM (as an “LMulator"). Experiments demonstrate that Chain of Code outperforms Chain of Thought and other baselines across a variety of benchmarks; on BIG-Bench Hard, Chain of Code achieves 84%, a gain of 12% over Chain of Thought. In a nutshell, CoC broadens the scope of reasoning questions that LMs can answer by “thinking in code".
Machine Learning, ICML
{CJK*}
UTF8gbsn
https://chain-of-code.github.io/
Direct answer only
Q: How many countries have I been to? I’ve been to Mumbai, London, Washington, Grand Canyon, ... A: 32 (20%, ✗), 29 (10%, ✗), 52 (10%, ✓), ...
Chain of Thought
Q: Let’s think step by step. How many countries have I been to? I’ve been to Mumbai, London, ... We’ll group by countries and count: 1. India: Mumbai, Delhi, Agra 2. UK: London, Dover, Edinburgh, Skye 3. USA: Washington, Grand Canyon, ... A: 61 (20%, ✗), 60 (20%, ✗), 52 (10%, ✓), ...
Chain of Code (Ours)
Q: How many countries have I been to? I’ve been to Mumbai, London, Washington, Grand Canyon, Baltimore, ... 1 places, countries = ["Mumbai", ...], set() delta state: {places = [‘Mumbai’, ...], countries = set()} 2 for place in places: delta state: {place = ‘Mumbai’} 3 country = get_country(place) delta state: {country = ‘India’)} 4 countries.add(country) delta state: {countries = {‘India’}} 5 answer = len(countries) delta state: {answer = 52} A: 52 (100%, ✓)
Figure 1: Chain of Code generates code and reasons through an LM-augmented code emulator. Lines evaluated with Python are in red and with an LM are in purple. The full query is in Fig. LABEL:fig:intro_query.
<details>
<summary>extracted/5762267/fig/all_tasks_direct.png Details</summary>
### Visual Description
## Bar Chart: Delta w.r.t. average human rater (%)
### Overview
The image is a bar chart displaying the difference (delta) with respect to the average human rater, expressed as a percentage. The bars are arranged along the x-axis, with the y-axis representing the percentage difference. The bars transition in color from orange to blue, indicating a shift from negative to positive differences.
### Components/Axes
* **X-axis:** No explicit labels are provided for the x-axis categories. The bars are arranged sequentially, implying an ordinal or categorical scale.
* **Y-axis:** Labeled as "Δ w.r.t. average human rater (%)". The scale ranges from -100% to 100%, with tick marks at -100, -50, 0, 50, and 100.
* **Bars:** The bars are colored in a gradient from orange to blue. The orange bars represent negative differences (below the average human rater), while the blue bars represent positive differences (above the average human rater).
### Detailed Analysis
The chart shows a series of bars, each representing a different data point. The bars are arranged in ascending order of their values.
* **Orange Bars (Negative Differences):**
* The leftmost orange bar has a value of approximately -58%.
* The orange bars gradually increase in value, with the last orange bar reaching approximately -5%.
* **Gradient Bars (Near Zero Differences):**
* The bars transition from orange to a light purple/gray color, indicating values close to 0%.
* These bars are near the 0% mark on the y-axis.
* **Blue Bars (Positive Differences):**
* The blue bars represent positive differences, indicating values above the average human rater.
* The first blue bar is approximately at 8%.
* The next blue bar is approximately at 22%.
* The last blue bar is approximately at 32%.
### Key Observations
* There is a clear trend from negative to positive differences.
* The majority of the data points show negative differences compared to the average human rater.
* Only a few data points show positive differences.
* The transition from negative to positive differences is gradual.
### Interpretation
The chart suggests that, for most of the data points, the values are lower than the average human rater. The gradual transition from orange to blue indicates a continuous spectrum of differences. The few blue bars suggest that only a small portion of the data points exceed the average human rater's values. The chart could be used to identify areas where the data points significantly deviate from the average human rater, either positively or negatively.
</details>
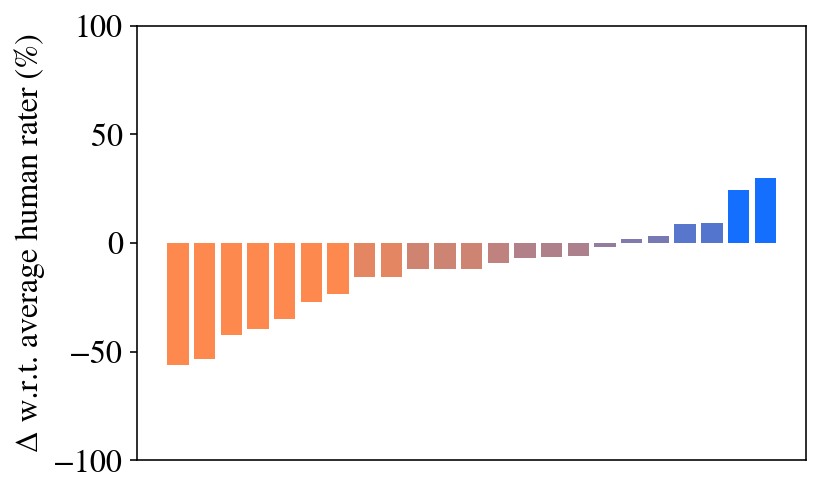
(a) Direct answer only
<details>
<summary>extracted/5762267/fig/all_tasks_cot.png Details</summary>
### Visual Description
## Bar Chart: Delta w.r.t. Average Human Rater
### Overview
The image is a bar chart displaying the difference (delta) with respect to the average human rater, expressed as a percentage. The bars are arranged along the x-axis, with the y-axis representing the percentage difference. The bars are colored in a gradient from orange to blue, with orange bars indicating negative differences and blue bars indicating positive differences.
### Components/Axes
* **X-axis:** Represents different raters or categories (unlabeled).
* **Y-axis:** "Δ w.r.t. average human rater (%)". The scale ranges from -100% to 100%, with markers at -100, -50, 0, 50, and 100.
* **Bars:** Each bar represents the difference between a specific rater's score and the average human rater's score. The color of the bars transitions from orange to blue.
### Detailed Analysis
The chart shows a distribution of differences relative to the average human rater.
* **Negative Differences (Orange Bars):** The bars on the left side of the chart are orange and represent raters who scored lower than the average human rater. The leftmost bar has a value of approximately -35%. The second bar has a value of approximately -25%. The remaining orange bars are between -10% and 0%.
* **Positive Differences (Blue Bars):** The bars on the right side of the chart are blue and represent raters who scored higher than the average human rater. The values range from approximately 0% to 40%. The rightmost bar has a value of approximately 40%.
### Key Observations
* There is a clear trend from negative differences (orange bars) to positive differences (blue bars).
* The distribution appears to be somewhat skewed towards positive differences, as there are more blue bars than orange bars.
* The largest negative difference is approximately -35%, while the largest positive difference is approximately 40%.
### Interpretation
The bar chart illustrates the variability in ratings compared to the average human rater. The color gradient helps to visually distinguish between raters who scored lower (orange) and higher (blue) than the average. The chart suggests that while some raters consistently score lower than the average, a larger number of raters tend to score higher. The magnitude of the differences indicates the degree of agreement or disagreement among the raters.
</details>
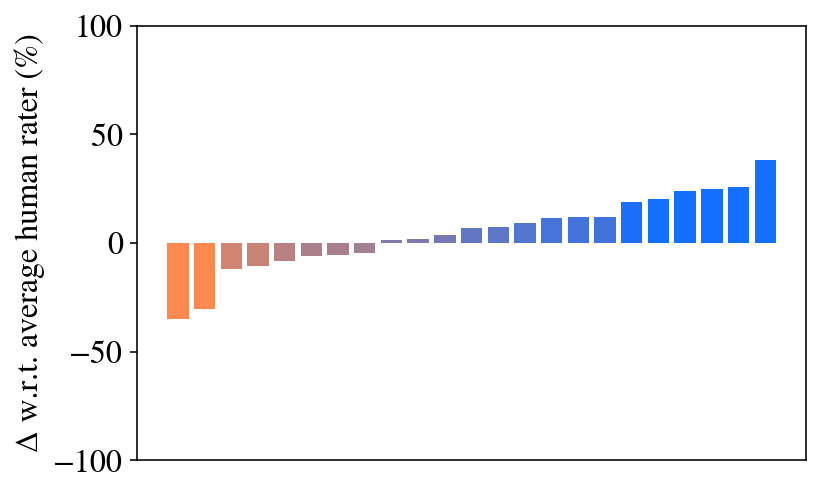
(b) Chain of Thought
<details>
<summary>extracted/5762267/fig/all_tasks_coc_interweave_no_title.png Details</summary>
### Visual Description
## Bar Chart: Delta w.r.t. Average Human Rater
### Overview
The image is a bar chart displaying the difference (delta) with respect to the average human rater, expressed as a percentage. The x-axis represents different categories (unspecified, but implied to be individual raters or items being rated), and the y-axis represents the percentage difference from the average human rating. The bars are colored in a gradient from orange to blue, with orange bars indicating negative differences and blue bars indicating positive differences.
### Components/Axes
* **X-axis:** Categories are not explicitly labeled, but are represented by the individual bars.
* **Y-axis:**
* Label: "Δ w.r.t. average human rater (%)"
* Scale: Ranges from -100% to 100% with markers at -100, -50, 0, 50, and 100.
* **Colors:**
* Orange: Indicates a negative difference from the average human rater.
* Blue: Indicates a positive difference from the average human rater.
### Detailed Analysis
The chart shows a distribution of differences from the average human rater. The bars are arranged in ascending order.
* **Orange Bars (Negative Differences):**
* The first bar (leftmost) has a value of approximately -35%.
* The second bar has a value of approximately -20%.
* The third bar has a value of approximately -10%.
* **Blue Bars (Positive Differences):**
* The fourth bar is approximately 0%.
* The fifth bar is approximately 2%.
* The sixth bar is approximately 5%.
* The seventh bar is approximately 8%.
* The eighth bar is approximately 10%.
* The ninth bar is approximately 12%.
* The tenth bar is approximately 14%.
* The eleventh bar is approximately 16%.
* The twelfth bar is approximately 18%.
* The thirteenth bar is approximately 20%.
* The fourteenth bar is approximately 30%.
* The fifteenth bar is approximately 35%.
* The sixteenth bar is approximately 40%.
* The seventeenth bar is approximately 45%.
* The eighteenth bar is approximately 50%.
* The nineteenth bar is approximately 95%.
### Key Observations
* The majority of the bars are blue, indicating that most categories have a positive difference from the average human rater.
* There is a significant outlier with a value close to 95%.
* The negative differences are smaller in magnitude compared to the largest positive difference.
### Interpretation
The chart suggests that there is a wide range of agreement among raters, with some raters consistently rating lower than the average and others consistently rating higher. The large positive outlier indicates a rater or item that is rated significantly higher than the average. The distribution of differences could be due to various factors, such as individual biases, different interpretations of the rating scale, or genuine differences in the quality of the items being rated. The fact that most bars are blue suggests a general tendency to rate higher than the average, or a selection bias in the data.
</details>
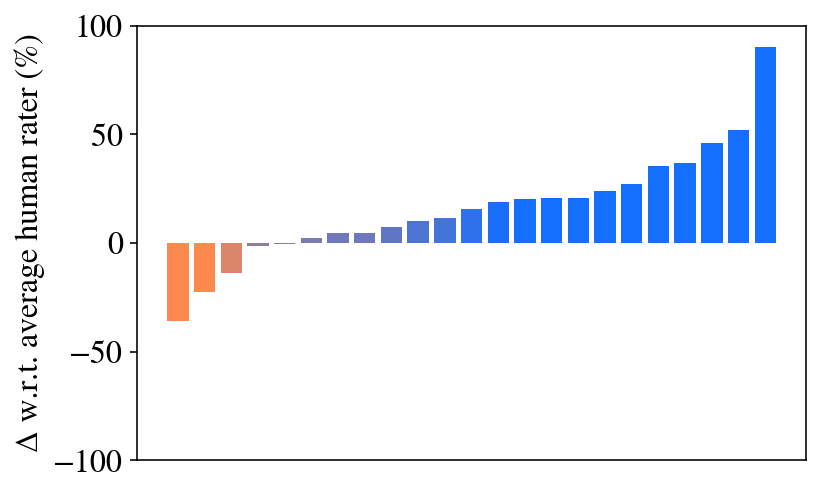
(c) Chain of Code (Ours)
Figure 2: Overall results on BIG-Bench Hard compared to human performance (Srivastava et al., 2022).
1 Introduction
Language models (LMs) at certain scale exhibit the profound ability to solve complex reasoning questions (Brown et al., 2020; Wei et al., 2022a) – from writing math programs (Drori et al., 2022) to solving science problems (Lewkowycz et al., 2022). Notably, these capabilities have shown to improve with Chain of Thought (CoT) prompting (Wei et al., 2022b), whereby complex problems are decomposed into a sequence of intermediate reasoning steps. CoT excels at semantic reasoning tasks, but tends to struggle with questions that involve numeric or symbolic reasoning (Suzgun et al., 2022; Mirchandani et al., 2023). Subsequent work addresses this by prompting LMs (e.g., trained on Github (Chen et al., 2021)) to write and execute code (Chen et al., 2022; Nye et al., 2021; Austin et al., 2021). Code in particular is advantageous because it provides both (i) a general syntactic structure to build and encode complex programs (Liang et al., 2023) (e.g., logic structures, functional vocabularies – in ways that are Turing complete), and (ii) an interface by which existing APIs paired together with an interpreter can be used to perform precise algorithmic computations (e.g., from multiplication of large numbers to sorting an array of size 10,000) that a language model trained only to mimic the statistically most likely next token would otherwise struggle to produce.
While writing and executing code may improve LM reasoning performance across a wide range of arithmetic tasks, this particular approach contends with the fact that many semantic tasks are rather difficult (and at times, nearly impossible) to express in code. For example, it remains unclear how to write a function that returns a boolean when it detects sarcasm in a string (Suzgun et al., 2022) (handling the edge cases would be insurmountable). Perhaps fundamentally, using LMs to write programs in lieu of multi-step textual reasoning inherently assumes that the intermediate reasoning traces (expressed in lines of code) all need to be executable by an interpreter. Is it possible to lift these restrictions to get the best of both reasoning in code and reasoning in language?
In this work, we propose Chain of Code (CoC), a simple yet surprisingly effective extension to improve LM code-driven reasoning – where the LM not only writes a program, but also selectively “simulates” the interpreter by generating the expected output of certain lines of code (that the interpreter could not execute). The key idea is to encourage LMs to format semantic sub-tasks in a program as flexible pseudocode that at runtime can be explicitly caught and handed off to emulate with an LM – we term this an LMulator (a portmanteau of LM and emulator). For example, given the task “ in the above paragraph, count how many times the person was sarcastic,” we can in-context prompt the LM to write a program that may call helper functions such as is_sarcastic(sentence), to which the LM makes a linguistic prediction and returns the result as a boolean output, that then gets processed with the rest of the program. Specifically, we formulate LM reasoning as the following process (illustrated in Figure 1): the LM writes code, the interpreter steps through to execute each line of code (in red), or if it fails, simulates the result with the LM (in purple) and updates the program state (in green). CoC inherits the benefits of both (i) writing executable code (where precise algorithmic compututations are left to an interpreter), and (ii) writing pseudocode for semantic problems, and generating their outputs (which can be thought of as a simple formatting change, to which LMs are robust (Min et al., 2022)) – enabling the LM to “think in code”.
Extensive experiments demonstrate that CoC is applicable to a wide variety of challenging numerical and semantic reasoning questions, and outperforms a number of popular baselines. In particular, we find that it achieves high performance on BIG-Bench Hard tasks (Suzgun et al., 2022), outperforming average human raters overall and outperforming even the best human raters on an algorithmic subset of tasks, and to the best of our knowledge setting a new state of the art. We further show that both code interpreter execution and language model execution simulation are necessary for this performance, and that the approach scales well with large and small models alike – contrary to prompting techniques like Chain of Thought that only emerge at scale. We then demonstrate how Chain of Code can serve as a general purpose reasoner via cross-task prompting benchmark, which in contrast to prior work, uses prompts from different families of problems as context – providing only the structure of the response (as opposed to the solution itself). Finally, we show CoC is complementary to more advanced instruction tuned chat models, robust against prompt variation, and applicable beyond language reasoning domain like robotics. This work underscores how one may leverage the structure and computational power of code and the reasoning abilities of language models to enable a “best of both worlds” reasoner.
2 Chain of Code: Reasoning with an LMulator
In this section, we describe Chain of Code (CoC), an approach that leverages the ability of language models to code, to reason, and to leverage an LM-augmented code emulator (an LMulator) to simulate running code. We start with background in Section 2.1, then overview the method in Section 2.2, its implementation in Section 2.3, and finally its capabilities in Section 2.4.
2.1 Preliminaries
Briefly, we overview some background on LM reasoning. Many of these reasoning techniques have been enabled by in-context learning (Brown et al., 2020), which provides the model with a few demonstrative examples at inference time, rather than updating any weights with gradients. These examples serve to provide context and format for the setting, enabling the model to emulate these examples while adapting to a new query. This property has been instrumental in easily applying LMs to new tasks as it can be rapidly adapted and requires minimal data.
Through in-context learning, approaches have been developed to leverage human thought processes and use tools to improve performance of language models. We outline three such approaches that provide the foundations for Chain of Code. Chain of Thought (CoT) (Wei et al., 2022b), ScratchPad (Nye et al., 2021), and Program of Thoughts (Chen et al., 2022) demonstrated the efficacy of breaking problems down into substeps. For CoT these substeps are in natural language, mirroring one’s thought process when stepping through a complicated problem. ScratchPad, on the other hand, maintains a program state of intermediate steps when simulating the output of code – resulting in an LM acting as a code interpreter. Program of Thoughts (Chen et al., 2022) focused on generating the code itself, which is then executed by a code interpreter to solve reasoning problems. Each of these is visualized in Figure 3(c).
(a) Chain of Thought
(b) Program of Thoughts
(c) ScratchPad
Figure 3: Previous reasoning methods: To solve advanced problems, (LABEL:fig:prelim-cot) Chain of Thought prompting breaks the problem down into intermediate steps, (LABEL:fig:prelim-pot) Program of Thoughts prompting writes and executes code, and (LABEL:fig:prelim-scratchpad) ScratchPad prompting simulates running already written code by tracking intermediate steps through a program state. Our reasoning method: Chain of Code first (LABEL:fig:method_generation) generates code or psuedocode to solve the question and then (LABEL:fig:method_execution) executes the code with a code interpreter if possible, and with an LMulator (language model emulating code) otherwise. Blue highlight indicates LM generation, red highlight indicates LM generated code being executed, and purple highlight indicates LMulator simulating the code via a program state in green.
(d) Chain of Code Generation (Ours)
(e) Chain of Code Execution (Ours)
2.2 Chain of Code
Inspired by how a human may reason through a particularly complex problem with a mix of natural language, pseudocode, and runnable code or how a researcher may develop a new general algorithm through a code-based formalism then apply it to a problem, Chain of Code proceeds in two steps: (1) Generation, which, given the question to solve, an LM generates code to reason through the problem, and (2) Execution, which executes the code via a code interpreter when possible and via an LM when not. See Section 2.3 for more details on the specific implementation.
Chain of Code Generation Given a problem to solve, CoC generates reasoning substeps in the structure of code. This code provides the framework of reasoning through the problem, and may be in the form of explicit code, pseudocode, or natural language. Figure LABEL:fig:method_generation walks through a potential generation to solve an object counting problem from BIG-Bench.
Chain of Code Execution A core contribution of CoC is not just the generation of reasoning code, but the manner in which it is executed. Once the code is written, the code is attempted to be run by a code interpreter – in this work we consider Python, but the approach is general to any interpreter. If the code is successfully executed, the program state is updated and the execution continues. If the code is not executable or raises any exception, the language model instead is used to simulate the execution. The program state is subsequently updated by the language model’s outputs and the execution continues. Herein, we refer to this as an LMulator, a portmanteau of LM and code emulator. This relatively simple change enables a variety of new applications for code which mix semantics and numerics. Figure LABEL:fig:method_execution shows how the generated code is run, maintaining the program state and switching between the Python executor and the LMulator.
2.3 Chain of Code Implementation
While the generation implementation is straightforward prompting and language model generation, the execution implementation is slightly more complex. Our implementation is based on using Python’s try and except and maintaining a program state. Line by line CoC steps through the code. If the line is executable by a code interpreter, it is executed, the program state is updated, and the program continues. If it is not executable by a code interpreter, a language model is given the context of the program (the question, the prior lines, and the history of the program state) and generates the next program state. This emulation can also leverage chain of thought to determine how to respond. That generated program state is then updated for the code interpreter as well. This sharing of program state interweaves the code interpreter and the language model simulator in a manner applicable to arbitrary interweaving, even control flow like for -loops and if -statements. This continues until the entire code is run, and the answer is retrieved as the value of the variable named answer, or in case of irrecoverable errors, with the language model outputting A: answer.
To illustrate with a brief example, the code answer = 0; answer += is_sarcastic(‘you don’t say’); answer += 1; would be executed as follows: (1) Python would execute the first line answer = 0; and update the program state to {answer = 0}, (2) Python would attempt to execute the second line and fail, and thus the LMulator would simulate the code answer += is_sarcastic(‘you don’t say’); by generating the program state {answer = 1}, which would be updated in the program, (3) Python would execute the last line answer += 1; and update the program state to {answer = 2}, (4) the answer would be retrieved as 2.
2.4 Chain of Code Abilities
Chain of Code has several attractive properties:
1. It enables code use in entirely new regimes, by combining the advantages of code with the powerful semantic and commonsense knowledge of language models, which can easily express rules that are challenging to express in code (e.g., which foods are fruits?). Such an ability may have benefits beyond reasoning problems and its flexibility enables executing expressive language, such as pseudocode.
1. It leverages the ability of language models to code, a particular strength of recent language models due to the high quality data available.
1. It inherits many of the benefits of reasoning code, both the formal yet expressive structure of code (e.g., Turing completeness) and powerful computational tools available to code (whether simply multiplying two numbers, calculating $\sqrt[5]{12121}$ , or simulating physics).
1. It inherits many of the benefits of techniques that reason via intermediate steps, such as Chain of Thought. These techniques enable the language model to use more computation when necessary to solve a problem as well as provide more interpretability.
Empirically, we observe in Section 3 that these benefits results in significant improvements in reasoning performance over a variety of challenging tasks.
3 Experimental Evaluation
We select challenging problems requiring varied types of reasoning, whether arithmetic, commonsense, or symbolic reasoning tasks, to answer the following questions:
1. How well does CoC perform across a variety of tasks?
1. Which types of problems does CoC perform best?
1. How does each aspect of CoC affect performance?
1. How does CoC scale with model size?
1. How does CoC perform as a general-purpose reasoner, with prompt examples from different problems rather than the same problem (which we term cross-task prompting)?
1. How can CoC be used with instruction tuned chat models?
1. How robust CoC is against prompt variation?
1. Can CoC be applied beyond language reasoning tasks?
We first discuss the approaches, ablations, and baselines considered in Section 3.1, then the tasks considered in Section 3.2, and finally the results in Section 3.3.
3.1 Baselines and Ablations
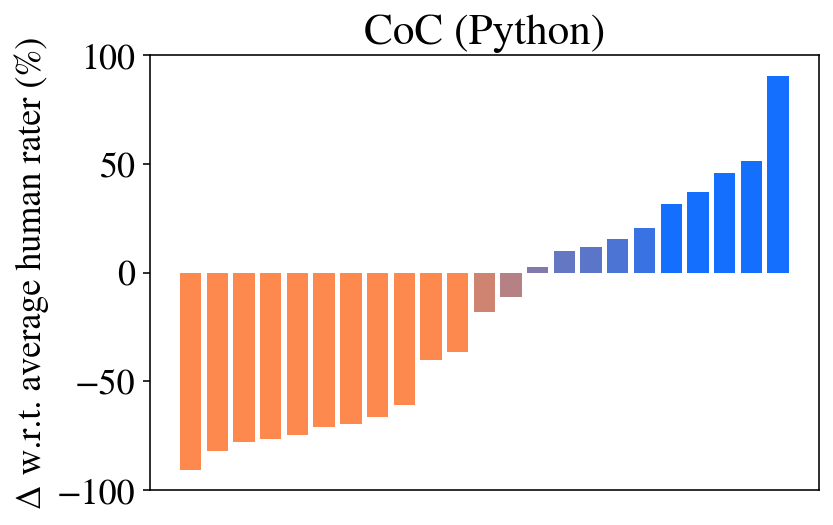
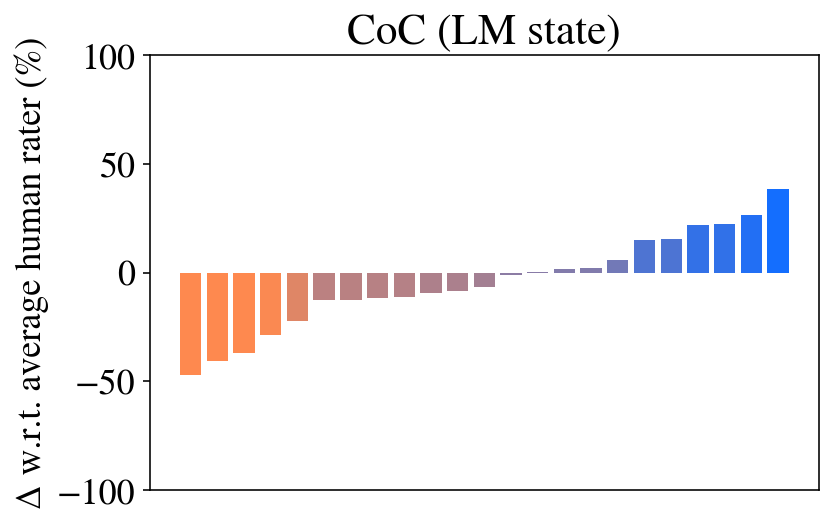
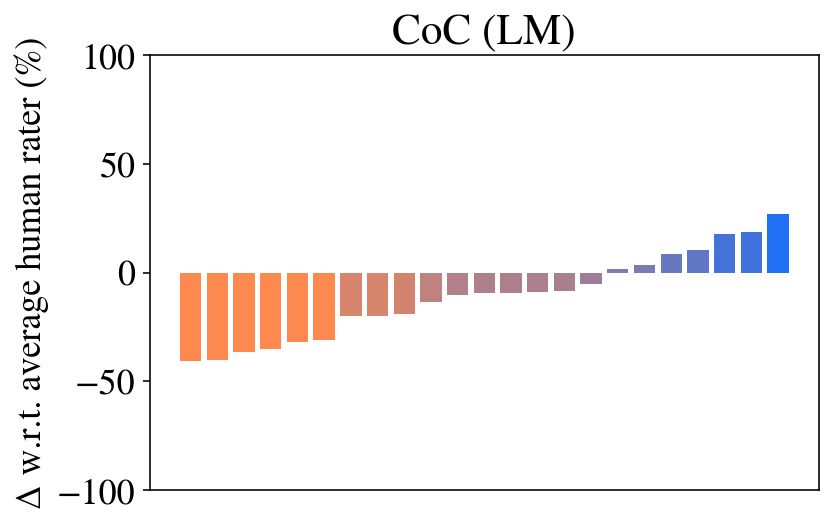
We consider our main method to be CoC (Interweave), also referred to as CoC (Ours), though we also propose two variants with simpler implementation and modestly lower performance: CoC (try Python except LM) and CoC (try Python except LM state). These two variants attempt to run the entire generated code with Python (rather than line by line) and if it fails, simulate the code execution with the LMulator, outputting a final answer or an intermediate state trace, respectively. We also perform the following ablations, some of which are comparable to previous work as noted. In CoC (Python) Python is used to run the entire generated code and if the code is not executable, it is marked as failure – this can be thought of as a comparison to Program of Thoughts (Chen et al., 2022) or Program-aided language models (Gao et al., 2023). We note that in many cases this baseline is particularly challenged, as writing executable code for some of the reasoning problems becomes nearly impossible (e.g., writing code to judge if a phrase is sarcastic), but one may focus on the results for Algorithmic only tasks for a more fair comparison. In CoC (LM) the code is interpreted by an LMulator outputting the final answer, and in CoC (LM state) the code is interpreted by an LMulator outputting a state trace of intermediate steps – this can be thought of as ScratchPad prompting for reasoning (Nye et al., 2021). Note, the last two ablations do not leverage the Python interpreter.
We also compare against the following baselines. In Direct question answering the LM simply responds to the question with a final answer. In Chain of Thought prompting (CoT) the LM uses intermediate steps to solve the task; we use CoT as our standard prompt technique for the field of substep prompting (Kojima et al., 2022; Zhou et al., 2022a) as prompts are readily available.
3.2 Tasks
We consider a subset of challenging tasks from BIG-Bench (Srivastava et al., 2022) called BIG-Bench Hard (BBH) (Suzgun et al., 2022) to ensure we are solving the most challenging tasks. These tasks were specifically selected for their difficulty for language models and the datasets provides human-rater baselines and a set of Chain of Thought prompts. The 23 tasks require semantic reasoning (e.g., “Movie Recommendation”), numerical reasoning (e.g., “Multi-Step Arithmetic”), and a combination of both (e.g., “Object Counting”). As such they enable us to study the efficacy of CoC across varied problems, not just those that coding is a natural fit for. Several prompts are shown in Figure A1. We also show results for the grade-school math (GSM8K) benchmark (Cobbe et al., 2021) in Section A.2, although we find that these problems are primarily solved algorithmically alone through code.
These tasks are evaluated with few-shot prompting, whereby three examples from the same problem family are provided as context. We also introduce a new evaluation setting, cross-task prompting, whereby three examples of different problems are provided as context. As such, the language model has in-context examples of the format of reasoning, but isn’t provided explicit instructions on how to reason. We see this as an indicative signal for a general-purpose reasoner, which in many real-world applications (e.g., chatbots) would be asked to reason across a wide variety of tasks.
The models used herein include the OpenAI family of models: text-ada-001, text-baggage-001, text-curie-001, and text-davinci-003 (in plots we denote these as a-1, b-1, c-1, and d-3). We also consider PaLM-2’s code finetuned variant (Chowdhery et al., 2022; Google et al., 2023). For instruction tuned models, we compare to recent variants of GPT (gpt-3.5-turbo and gpt-4) with the chat completion mode run in October 2023 and January 2024. The results below are using the text-davinci-003 model unless otherwise stated.
3.3 Results
Question 1: Overall Performance. The overall performance of CoC is shown in Figure 2 and Table 1 (with full results in Table A1). We see that CoC outperforms other approaches, both in the number of tasks it exceeds the human baseline and in the overall amount that it exceeds the baseline. Indeed, CoC’s 84% is SoTA to the best of our knowledge (Gemini Team, 2023). In fact, when combined with gpt-4, CoC achieves 91% (see Table A4). In several tasks CoC vastly outperforms the human baseline and other methods, achieving nearly 100% – generally for these tasks the result is complicated in language but trivial in code (e.g., a task from multi-step arithmetic Q: $((-3+5× 8×-4)-(9-8×-7))=$ ). We also observe that CoT outperforms the human baseline on a number of tasks, while the Direct answer fares poorly.
Table 1: Overall performance (%) on BIG-Bench Hard with both few-shot prompting with a single task and cross-task. The delta compared to direct prompting is shown in parenthesis.
| Prompt | Human | text-davinci-003 Direct | PaLM 2-S* (code variant (Google et al., 2023)) CoT | CoC (Ours) | Direct | CoT | CoC (Ours) |
| --- | --- | --- | --- | --- | --- | --- | --- |
| Single task | 68 | 55 | 72 (+17) | 84 (+29) | 49 | 61 (+12) | 78 (+29) |
| Cross task | - | 50 | 55 (+5) | 61 (+11) | 45 | 47 (+2) | 47 (+2) |
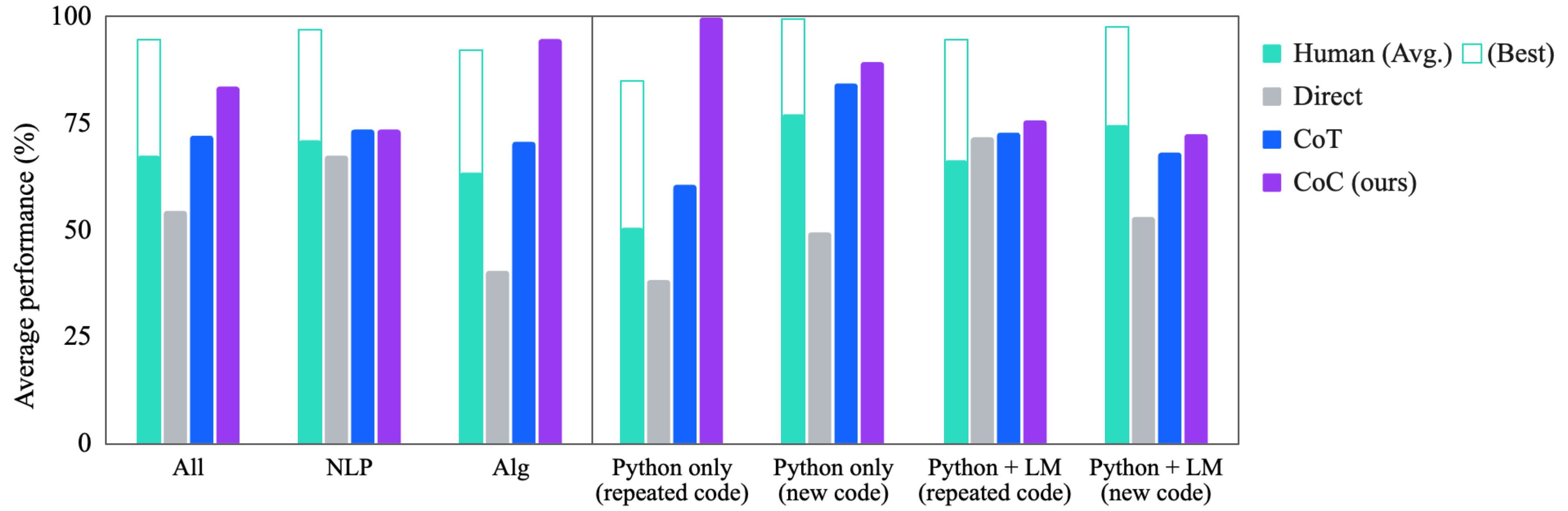
Question 2: Problem Type. Figure 4 breaks the results down by problem type; the task labels are shown in Table A1. First, we isolate problems that are primarily algorithmic or primarily natural language (these categories were identified in (Suzgun et al., 2022)). We see that on algorithmic tasks, CoC performs particularly well, while on natural language tasks CoC performs on par with CoT. This is particularly encouraging, because one may expect these language oriented tasks to be a worse fit for code. The key is that our method offers the flexibility of using a LMulator to simulate the output of code execution, retaining the semantic reasoning capabilities of LMs for natural language problems.
Figure 4 additionally breaks the tasks down into categories that capture how different each question’s response is and whether the code can be fully executed by Python (denoted Python only vs. Python + LM). For some tasks within the benchmark, each question has the same code or Chain of Thought, with the only variation being the inputs – in this case we say the code is (repeated code), and if not then it is denoted (new code). As expected, we see that when the code is repeated and run by Python, CoC gets nearly 100%, though these tasks (e.g., multi-step arithmetic) seem to be among the most challenging for the other baselines, including human raters. The other categories are more challenging for CoC; however in each, we still see a benefit over baselines.
<details>
<summary>extracted/5762267/fig/by_task_type.png Details</summary>
### Visual Description
## Bar Chart: Average Performance Comparison
### Overview
The image is a bar chart comparing the average performance (%) of different methods (Human, Direct, CoT, CoC) across various tasks: All, NLP, Alg, Python only (repeated code), Python only (new code), Python + LM (repeated code), and Python + LM (new code). The y-axis represents the average performance in percentage, ranging from 0 to 100. The x-axis represents the different tasks.
### Components/Axes
* **Y-axis:** "Average performance (%)", with scale markers at 0, 25, 50, 75, and 100.
* **X-axis:** Categorical axis representing different tasks: All, NLP, Alg, Python only (repeated code), Python only (new code), Python + LM (repeated code), Python + LM (new code).
* **Legend (Top-Right):**
* Human (Avg.): Teal bar
* Human (Best): White outline on Teal bar
* Direct: Gray bar
* CoT: Blue bar
* CoC (ours): Purple bar
### Detailed Analysis
**1. All Tasks:**
* Human (Avg.): ~67%
* Human (Best): ~93%
* Direct: ~53%
* CoT: ~72%
* CoC (ours): ~81%
**2. NLP Tasks:**
* Human (Avg.): ~73%
* Human (Best): ~95%
* Direct: ~67%
* CoT: ~73%
* CoC (ours): ~80%
**3. Alg Tasks:**
* Human (Avg.): ~65%
* Human (Best): ~92%
* Direct: ~40%
* CoT: ~69%
* CoC (ours): ~95%
**4. Python only (repeated code):**
* Human (Avg.): ~50%
* Human (Best): ~85%
* Direct: ~38%
* CoT: ~58%
* CoC (ours): ~100%
**5. Python only (new code):**
* Human (Avg.): ~77%
* Human (Best): ~100%
* Direct: ~50%
* CoT: ~85%
* CoC (ours): ~98%
**6. Python + LM (repeated code):**
* Human (Avg.): ~70%
* Human (Best): ~95%
* Direct: ~70%
* CoT: ~73%
* CoC (ours): ~75%
**7. Python + LM (new code):**
* Human (Avg.): ~70%
* Human (Best): ~80%
* Direct: ~53%
* CoT: ~65%
* CoC (ours): ~73%
### Key Observations
* CoC (ours) generally outperforms other methods (Direct, CoT) across most tasks.
* Human (Best) performance is consistently high across all tasks.
* Direct method shows lower performance compared to other methods, especially in Alg and Python only (repeated code) tasks.
* The performance of all methods varies depending on the task.
### Interpretation
The bar chart provides a comparative analysis of different methods for various tasks. The CoC (ours) method appears to be a strong performer, often exceeding the performance of Direct and CoT methods. The Human (Best) performance represents an upper bound or ideal performance level. The differences in performance across tasks suggest that the effectiveness of each method is task-dependent. The "Python only" tasks show a significant performance boost with the CoC method, especially when dealing with repeated code. The addition of Language Models (LM) in the "Python + LM" tasks seems to narrow the performance gap between the different methods.
</details>
Figure 4: Average performance across different baselines grouped by task type, indicating the problem type and how CoC is generated & executed.
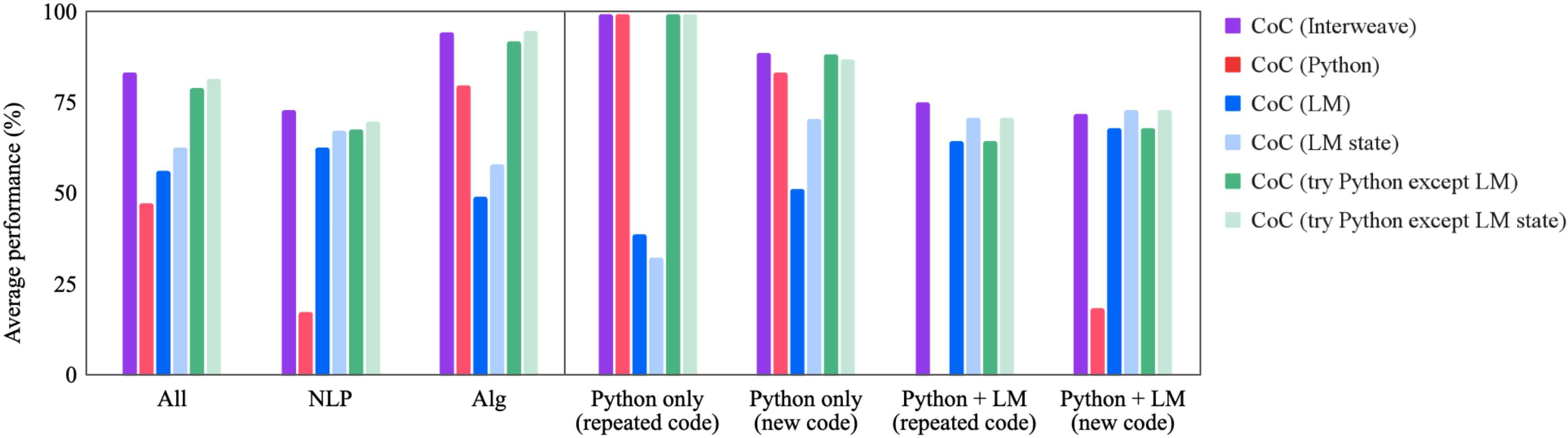
Question 3: Ablations. Figures 5 and 6, and Table 2 show the ablations performed to motivate each aspect of Chain of Code prompting. As one may expect, the approaches that execute Python (CoC (Interweave, Python, try Python except LM, try Python except LM state)) achieve 100% performance on several tasks – if the code is correct, then the model will be correct every time. However, the approach that relies on Python alone (CoC (Python)) performs poorly when applied to non-algorithmic tasks, failing almost all. The CoC (Python) ablation is similar to recent works (Gao et al., 2023; Chen et al., 2022), which show that if applied to numerical problems then code reasoning performs well. CoC without the Python interpreter (CoC (LM, LM state)) too fares poorly, though we see that the step-by-step approach proposed in ScratchPad prompting (Nye et al., 2021) improves in each task.
We also show that ablations CoC (try Python except LM, try Python except LM state), in which CoC first tries to run the entire code with Python and if it fails simulates the code with an LM, perform quite well. Again we see that maintaining a program state provides an improvement in performance. With only minor degradations in performance observed, they are reasonable alternatives to the fully interweaved CoC for their simplicity. Though we note, these ablations’ performance would be much worse in cases where interweaving code and semantics is truly necessary – for example, if we imagine a case where code is necessary to parse image inputs or to access an external database, but language is necessary to parse the results (see the robotics applications in Section A.6).
<details>
<summary>extracted/5762267/fig/by_task_type_ablation.png Details</summary>
### Visual Description
## Bar Chart: Average Performance Comparison
### Overview
The image is a bar chart comparing the average performance (in percentage) of different methods, labeled as "CoC (Interweave)", "CoC (Python)", "CoC (LM)", "CoC (LM state)", "CoC (try Python except LM)", and "CoC (try Python except LM state)", across various tasks or scenarios: "All", "NLP", "Alg", "Python only (repeated code)", "Python only (new code)", "Python + LM (repeated code)", and "Python + LM (new code)".
### Components/Axes
* **Y-axis:** "Average performance (%)", with scale markers at 0, 25, 50, 75, and 100.
* **X-axis:** Categorical labels representing different tasks or scenarios: "All", "NLP", "Alg", "Python only (repeated code)", "Python only (new code)", "Python + LM (repeated code)", and "Python + LM (new code)".
* **Legend:** Located on the right side of the chart, mapping colors to methods:
* Purple: "CoC (Interweave)"
* Red: "CoC (Python)"
* Blue: "CoC (LM)"
* Light Blue: "CoC (LM state)"
* Green: "CoC (try Python except LM)"
* Light Green: "CoC (try Python except LM state)"
### Detailed Analysis or ### Content Details
**1. All**
* CoC (Interweave) (Purple): ~82%
* CoC (Python) (Red): ~47%
* CoC (LM) (Blue): ~54%
* CoC (LM state) (Light Blue): ~66%
* CoC (try Python except LM) (Green): ~78%
* CoC (try Python except LM state) (Light Green): ~82%
**2. NLP**
* CoC (Interweave) (Purple): ~72%
* CoC (Python) (Red): ~15%
* CoC (LM) (Blue): ~60%
* CoC (LM state) (Light Blue): ~65%
* CoC (try Python except LM) (Green): ~68%
* CoC (try Python except LM state) (Light Green): ~70%
**3. Alg**
* CoC (Interweave) (Purple): ~95%
* CoC (Python) (Red): ~78%
* CoC (LM) (Blue): ~48%
* CoC (LM state) (Light Blue): ~55%
* CoC (try Python except LM) (Green): ~97%
* CoC (try Python except LM state) (Light Green): ~98%
**4. Python only (repeated code)**
* CoC (Interweave) (Purple): ~99%
* CoC (Python) (Red): ~99%
* CoC (LM) (Blue): ~35%
* CoC (LM state) (Light Blue): ~30%
* CoC (try Python except LM) (Green): ~99%
* CoC (try Python except LM state) (Light Green): ~99%
**5. Python only (new code)**
* CoC (Interweave) (Purple): ~89%
* CoC (Python) (Red): ~88%
* CoC (LM) (Blue): ~88%
* CoC (LM state) (Light Blue): ~90%
* CoC (try Python except LM) (Green): ~89%
* CoC (try Python except LM state) (Light Green): ~90%
**6. Python + LM (repeated code)**
* CoC (Interweave) (Purple): ~62%
* CoC (Python) (Red): ~10%
* CoC (LM) (Blue): ~62%
* CoC (LM state) (Light Blue): ~72%
* CoC (try Python except LM) (Green): ~62%
* CoC (try Python except LM state) (Light Green): ~72%
**7. Python + LM (new code)**
* CoC (Interweave) (Purple): ~68%
* CoC (Python) (Red): ~12%
* CoC (LM) (Blue): ~68%
* CoC (LM state) (Light Blue): ~70%
* CoC (try Python except LM) (Green): ~68%
* CoC (try Python except LM state) (Light Green): ~70%
### Key Observations
* "CoC (try Python except LM state)" and "CoC (try Python except LM)" generally perform well across all tasks.
* "CoC (Python)" shows lower performance in "NLP", "Python + LM (repeated code)", and "Python + LM (new code)" scenarios.
* "CoC (LM)" has significantly lower performance in "Python only (repeated code)" compared to other scenarios.
* For "Python only (repeated code)", all methods except "CoC (LM)" and "CoC (LM state)" achieve near-perfect performance.
### Interpretation
The bar chart provides a comparative analysis of different methods ("CoC" variants) across various tasks. The performance varies significantly depending on the task and the method used. The "CoC (try Python except LM)" and "CoC (try Python except LM state)" methods generally exhibit high performance, suggesting that excluding the Language Model (LM) in certain Python-based approaches can be beneficial. The lower performance of "CoC (Python)" in specific scenarios indicates potential limitations or inefficiencies in those contexts. The chart highlights the importance of selecting the appropriate method based on the specific task requirements to optimize performance. The near-perfect performance of most methods in "Python only (repeated code)" suggests that repeated code execution benefits from these approaches, while the lower performance of "CoC (LM)" in the same scenario indicates a potential incompatibility or inefficiency when using a Language Model with repeated code.
</details>
Figure 5: Chain of Code ablations on average performance grouped by task type.
<details>
<summary>extracted/5762267/fig/all_tasks_coc_interweave.png Details</summary>
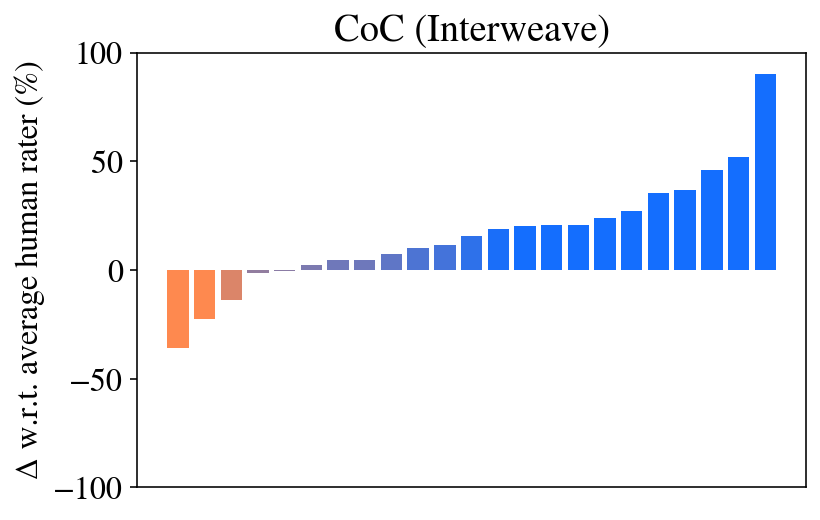
### Visual Description
## Bar Chart: CoC (Interweave)
### Overview
The image is a bar chart titled "CoC (Interweave)". The chart displays the difference in performance relative to the average human rater, expressed as a percentage. The x-axis represents different categories (unspecified), and the y-axis represents the percentage difference. The bars are colored in a gradient from orange to blue, indicating a transition from negative to positive differences.
### Components/Axes
* **Title:** CoC (Interweave)
* **Y-axis Label:** Δ w.r.t. average human rater (%)
* **Y-axis Scale:** -100, -50, 0, 50, 100
* **X-axis:** No explicit label, but represents different categories or data points.
### Detailed Analysis
The bar chart shows a progression of values from negative to positive.
* **Initial Bars (Orange):** The first few bars are orange and represent negative values.
* The first bar is approximately -35%.
* The second bar is approximately -25%.
* The third bar is approximately -10%.
* **Transition Bars (Gradient):** The bars gradually transition from orange to blue, crossing the 0% line.
* The bar that crosses 0% is approximately at 1%.
* **Final Bars (Blue):** The remaining bars are blue and represent positive values.
* The values increase gradually, with the last few bars showing a more significant increase.
* The last bar is approximately 90%.
### Key Observations
* There is a clear trend of increasing performance relative to the average human rater.
* The chart shows a range of performance differences, from significantly below average to significantly above average.
* The color gradient visually represents the transition from negative to positive differences.
### Interpretation
The bar chart illustrates the performance of different categories or data points compared to the average human rater. The negative values (orange bars) indicate categories where performance is worse than the average human rater, while the positive values (blue bars) indicate categories where performance is better. The increasing trend suggests that, overall, the performance tends to be better than the average human rater for most of the categories represented in the chart. The "CoC (Interweave)" title might refer to a specific method or system being evaluated. Without further context, it's difficult to determine the exact nature of the categories represented on the x-axis.
</details>
<details>
<summary>extracted/5762267/fig/all_tasks_coc_try_except_llm_state.png Details</summary>
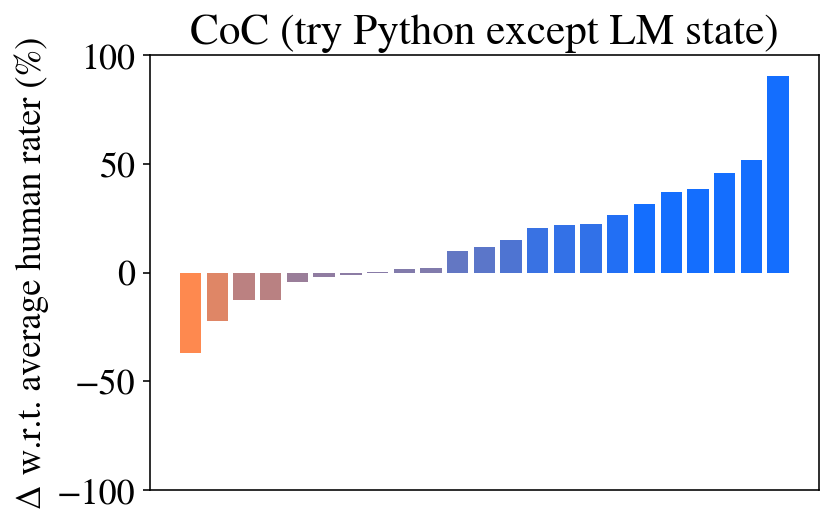
### Visual Description
## Bar Chart: CoC (try Python except LM state)
### Overview
The image is a bar chart displaying the change in performance relative to the average human rater for different configurations of a system, likely related to code generation or evaluation. The x-axis represents different configurations, and the y-axis represents the delta (Δ) with respect to the average human rater in percentage. The bars are colored in a gradient from orange to blue, indicating a spectrum of performance changes, from negative to positive.
### Components/Axes
* **Title:** CoC (try Python except LM state)
* **Y-axis Label:** Δ w.r.t. average human rater (%)
* **Y-axis Scale:** -100, -50, 0, 50, 100
* **X-axis:** Implicitly represents different configurations, but is not explicitly labeled.
* **Colors:** The bars are colored in a gradient from orange to blue, indicating a spectrum of performance changes, from negative to positive.
### Detailed Analysis
The chart presents a series of bars, each representing a different configuration. The bars are arranged in ascending order of performance change relative to the average human rater.
* **Negative Changes:** The first few bars on the left side of the chart are orange and represent configurations that perform worse than the average human rater.
* The first bar has a value of approximately -40%.
* The second bar has a value of approximately -20%.
* The third bar has a value of approximately -15%.
* The fourth bar has a value of approximately -10%.
* The fifth bar has a value of approximately -5%.
* **Near Zero Changes:** There are a few bars near the center that are close to zero, indicating performance similar to the average human rater.
* The sixth bar has a value of approximately -2%.
* The seventh bar has a value of approximately 0%.
* The eighth bar has a value of approximately 1%.
* **Positive Changes:** The bars on the right side of the chart are blue and represent configurations that perform better than the average human rater.
* The ninth bar has a value of approximately 5%.
* The tenth bar has a value of approximately 10%.
* The eleventh bar has a value of approximately 12%.
* The twelfth bar has a value of approximately 15%.
* The thirteenth bar has a value of approximately 20%.
* The fourteenth bar has a value of approximately 25%.
* The fifteenth bar has a value of approximately 35%.
* The sixteenth bar has a value of approximately 40%.
* The seventeenth bar has a value of approximately 45%.
* The eighteenth bar has a value of approximately 50%.
* The nineteenth bar has a value of approximately 95%.
### Key Observations
* The chart shows a wide range of performance changes, from significantly worse to significantly better than the average human rater.
* The majority of configurations perform better than the average human rater, as indicated by the larger number of blue bars.
* There is one configuration that stands out as significantly better than the others, with a performance change of approximately 95%.
* The configurations that perform worse than the average human rater are clustered on the left side of the chart.
### Interpretation
The data suggests that using "CoC (try Python except LM state)" can lead to significant improvements in performance compared to the average human rater in certain configurations. However, it also shows that some configurations perform worse. The title suggests that the system being evaluated involves code generation or evaluation, and that trying Python, except for the LM state, is a key factor. The wide range of performance changes indicates that the choice of configuration is critical for achieving optimal results. The outlier configuration with a 95% improvement suggests that there is a particularly effective configuration that should be investigated further.
</details>
<details>
<summary>extracted/5762267/fig/all_tasks_coc_try_except_llm.png Details</summary>
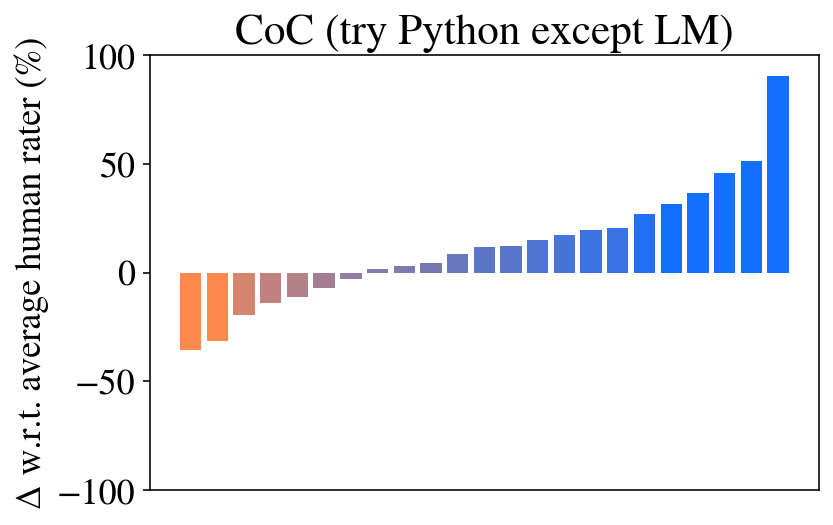
### Visual Description
## Bar Chart: CoC (try Python except LM)
### Overview
The image is a bar chart displaying the delta (Δ) with respect to the average human rater, expressed as a percentage. The x-axis is not explicitly labeled, but it represents different categories or models. The bars are colored in a gradient from orange to blue, with orange bars representing negative deltas and blue bars representing positive deltas. The chart title is "CoC (try Python except LM)".
### Components/Axes
* **Title:** CoC (try Python except LM)
* **Y-axis Label:** Δ w.r.t. average human rater (%)
* **Y-axis Scale:** -100, -50, 0, 50, 100
* **X-axis:** Implicit categories represented by the bars.
* **Bar Colors:** Gradient from orange to blue.
### Detailed Analysis
The chart shows a clear trend: the bars start with negative values (orange) and gradually increase to positive values (blue).
* **Orange Bars (Negative Deltas):**
* The first bar has a value of approximately -35%.
* The second bar has a value of approximately -30%.
* The third bar has a value of approximately -15%.
* The fourth bar has a value of approximately -10%.
* The fifth bar has a value of approximately -5%.
* **Bars Near Zero:**
* The sixth bar has a value of approximately -2%.
* The seventh bar has a value of approximately 1%.
* **Blue Bars (Positive Deltas):**
* The eighth bar has a value of approximately 5%.
* The ninth bar has a value of approximately 8%.
* The tenth bar has a value of approximately 10%.
* The eleventh bar has a value of approximately 12%.
* The twelfth bar has a value of approximately 15%.
* The thirteenth bar has a value of approximately 20%.
* The fourteenth bar has a value of approximately 25%.
* The fifteenth bar has a value of approximately 35%.
* The sixteenth bar has a value of approximately 40%.
* The seventeenth bar has a value of approximately 50%.
* The eighteenth bar has a value of approximately 95%.
### Key Observations
* There is a clear upward trend from negative to positive deltas.
* The last bar (rightmost) shows a significantly higher positive delta compared to the other bars.
* The bars transition from orange to blue, indicating a shift from negative to positive differences relative to the average human rater.
### Interpretation
The chart compares different models or categories (represented by the bars) against the average human rater. The y-axis represents the difference in performance between each model and the human rater. The negative values (orange bars) indicate that the model performed worse than the average human rater, while the positive values (blue bars) indicate that the model performed better. The upward trend suggests that the models generally improve as you move from left to right on the x-axis. The last bar, with a significantly higher positive delta, indicates that one particular model performs substantially better than the average human rater. The title "CoC (try Python except LM)" suggests that the models being compared are related to Chain of Command (CoC) and that Python was used, except for Language Models (LM).
</details>
<details>
<summary>extracted/5762267/fig/all_tasks_coc_python.png Details</summary>
### Visual Description
## Bar Chart: CoC (Python)
### Overview
The image is a bar chart titled "CoC (Python)". The chart displays the difference in performance compared to the average human rater, represented as a percentage. The x-axis represents different categories (unspecified), and the y-axis represents the delta with respect to the average human rater (%). The bars are colored in shades of orange and blue, indicating negative and positive differences, respectively.
### Components/Axes
* **Title:** CoC (Python)
* **Y-axis Label:** Δ w.r.t. average human rater (%)
* **Y-axis Scale:** -100 to 100, with markers at -100, -50, 0, 50, and 100.
* **X-axis:** No explicit label, but represents different categories.
* **Bar Colors:** Orange (negative values), Blue (positive values), and a gradient between orange and blue for values near zero.
### Detailed Analysis
The chart consists of a series of vertical bars. The bars on the left side of the chart are orange, indicating a negative difference compared to the average human rater. As we move from left to right, the bars transition to a gradient between orange and blue, then to blue, indicating a positive difference.
Here's a breakdown of approximate values for some of the bars:
* **Leftmost Orange Bar:** Approximately -90%
* **Middle Orange Bar:** Approximately -60%
* **Bar closest to zero (Orange-Blue Gradient):** Approximately -10%
* **First Blue Bar:** Approximately 5%
* **Rightmost Blue Bar:** Approximately 95%
The bars generally show a trend of increasing values from left to right.
### Key Observations
* A significant portion of the categories show a negative difference compared to the average human rater.
* The rightmost categories show a substantial positive difference, indicating better performance than the average human rater.
* There is a clear transition from negative to positive differences as we move across the categories.
### Interpretation
The bar chart compares the performance of a system (likely an AI model) against the average human rater across different categories. The "CoC (Python)" title suggests this system is related to "Chain of Command" or "Code of Conduct" implemented in Python. The negative values indicate categories where the system underperforms compared to human raters, while the positive values indicate categories where it outperforms them. The chart highlights the strengths and weaknesses of the system, showing where it excels and where it needs improvement. The transition from negative to positive differences suggests that the system's performance varies significantly across different categories.
</details>
<details>
<summary>extracted/5762267/fig/all_tasks_coc_llm_state.png Details</summary>
### Visual Description
## Bar Chart: CoC (LM state)
### Overview
The image is a bar chart titled "CoC (LM state)". The chart displays the difference in performance between a language model (LM) and average human raters. The y-axis represents the percentage difference in performance, while the x-axis represents different categories or data points, which are not explicitly labeled. The bars are colored in a gradient from orange to blue, indicating a spectrum of performance differences.
### Components/Axes
* **Title:** CoC (LM state)
* **Y-axis Label:** Δ w.r.t. average human rater (%)
* **Y-axis Scale:** -100, -50, 0, 50, 100
* **X-axis:** No explicit label, but represents different categories or data points.
* **Bar Colors:** Gradient from orange to blue.
### Detailed Analysis
The chart consists of a series of vertical bars, each representing a different data point. The bars are arranged in ascending order of height.
* **Orange Bars (Left Side):** These bars represent instances where the language model performed worse than the average human rater. The leftmost orange bar has a value of approximately -48%. The orange bars gradually decrease in magnitude, moving towards 0%.
* **Gradient Bars (Middle):** The bars transition from orange to a muted purple/gray, indicating a smaller negative difference. Some bars are close to 0%.
* **Blue Bars (Right Side):** These bars represent instances where the language model performed better than the average human rater. The blue bars increase in magnitude, with the rightmost blue bar reaching approximately 40%.
Specific Data Points (Approximate):
* Leftmost Orange Bar: -48%
* Second Orange Bar: -40%
* Third Orange Bar: -35%
* Rightmost Blue Bar: 40%
* Second Rightmost Blue Bar: 25%
### Key Observations
* The chart shows a clear trend of performance differences between the language model and human raters.
* The language model performs worse than human raters in the categories represented by the orange bars.
* The language model performs better than human raters in the categories represented by the blue bars.
* There is a transition zone (gradient bars) where the performance difference is minimal.
### Interpretation
The bar chart illustrates the relative performance of a language model compared to average human raters across a set of tasks or categories. The negative values (orange bars) indicate areas where the language model underperforms compared to humans, while the positive values (blue bars) indicate areas where the language model outperforms humans. The gradient in bar color suggests a continuous spectrum of performance differences. The chart suggests that the language model has strengths and weaknesses relative to human raters, with some tasks being better suited for the model and others better suited for humans. The lack of specific labels on the x-axis makes it difficult to determine the exact nature of these tasks or categories.
</details>
<details>
<summary>extracted/5762267/fig/all_tasks_coc_llm.png Details</summary>
### Visual Description
## Bar Chart: CoC (LM)
### Overview
The image is a bar chart titled "CoC (LM)". It displays the difference in performance between a system and average human raters, expressed as a percentage. The bars are arranged along the x-axis, with the y-axis representing the percentage difference. The bars are colored in a gradient, transitioning from orange on the left to blue on the right.
### Components/Axes
* **Title:** CoC (LM)
* **Y-axis Label:** Δ w.r.t. average human rater (%)
* **Y-axis Scale:** -100, -50, 0, 50, 100
* **X-axis:** Implicit categorical axis represented by the sequence of bars.
### Detailed Analysis
The chart consists of a series of vertical bars. The height of each bar represents the percentage difference relative to the average human rater.
* **Left Side (Orange Bars):** The bars on the left side of the chart are orange and extend downwards, indicating that the system performed worse than the average human rater for these categories. The values range from approximately -20% to -40%.
* **Middle (Gradient Bars):** The bars in the middle transition from orange to purple, indicating a gradual improvement in performance. The values range from approximately -20% to 0%.
* **Right Side (Blue Bars):** The bars on the right side of the chart are blue and extend upwards, indicating that the system performed better than the average human rater for these categories. The values range from approximately 0% to 25%.
Specific bar heights (approximate):
* Leftmost orange bar: -40%
* First purple bar: -20%
* First blue bar: 2%
* Rightmost blue bar: 25%
### Key Observations
* The system's performance varies significantly across different categories.
* The system performs worse than average human raters for the categories represented by the orange bars.
* The system performs better than average human raters for the categories represented by the blue bars.
* There is a gradual transition in performance from worse than average to better than average.
### Interpretation
The bar chart compares the performance of a system (likely a language model, given the "LM" in the title) against average human raters across a set of categories. The negative values on the left side indicate areas where the system underperforms compared to humans, while the positive values on the right side indicate areas where the system outperforms humans. The gradient in the middle suggests a spectrum of performance, with some categories showing near-parity between the system and human raters. The chart highlights the strengths and weaknesses of the system relative to human judgment.
</details>
Figure 6: Results across all BIG-Bench Hard tasks compared to human baseline (Srivastava et al., 2022). The tasks (x-axis) in each plot are sorted individually by performance. See Table A1 and Figure 5 for a breakdown by task type.
Table 2: Ablation overall performance (%) with both few-shot prompting with a single task and cross-task. The delta compared to the full model (Interweave) is shown in parenthesis.
| Prompt | Chain of Code Interweave | try Python-except LM state | try Python-except LM | Python | LM state | LM |
| --- | --- | --- | --- | --- | --- | --- |
| Single task | 84 | 82 (-2) | 80 (-4) | 48 (-36) | 63 (-21) | 57 (-27) |
| Cross task | 61 | 57 (-4) | 60 (-1) | 35 (-26) | 49 (-12) | 50 (-11) |
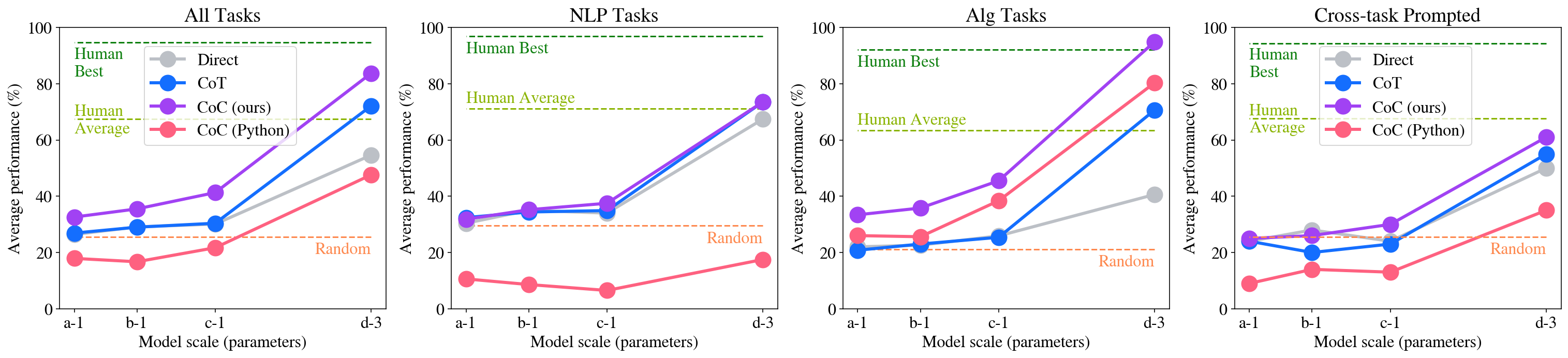
Question 4: Scaling. Figure 7 shows the performance of CoC across various model sizes. We observe that, similar to Chain of Thought prompting, the improvements of CoC increases as model size increases. In fact, for some of the algorithmic tasks, Chain of Code even outperforms the best human raters (whom admittedly did not have access to code). Unlike Chain of Thought prompting, however, which only brings performance benefits for the largest model (d-3), CoC outperforms the direct question answering baseline also for smaller models (a-1, b-1, c-1), suggesting that it’s easier for smaller models to output structured code as intermediate steps rather than natural languages.
Question 5: Cross-task Prompting. For cross-task prompting, we prompt the language models with a few examples from different problems. We see the performance drops for all methods in Figure 7 and Table 1. Despite this drop, CoC outperforms CoT and direct prompting at scale, nearly achieving human average performance. This is a promising indication towards general purpose reasoning, in which a model does not expect to receive examples of similar problems in its prompt.
<details>
<summary>extracted/5762267/fig/by_size_all.png Details</summary>
### Visual Description
## Line Charts: Model Performance on Different Tasks
### Overview
The image contains four line charts comparing the performance of different models (Direct, CoT, CoC (ours), and CoC (Python)) on four different task categories: All Tasks, NLP Tasks, Alg Tasks, and Cross-task Prompted. The x-axis represents the model scale (parameters), and the y-axis represents the average performance in percentage. Horizontal dashed lines indicate "Human Best", "Human Average", and "Random" performance levels.
### Components/Axes
* **Titles:**
* Top-left chart: "All Tasks"
* Top-middle-left chart: "NLP Tasks"
* Top-middle-right chart: "Alg Tasks"
* Top-right chart: "Cross-task Prompted"
* **X-axis:** "Model scale (parameters)" with markers: a-1, b-1, c-1, d-3
* **Y-axis:** "Average performance (%)" with markers: 0, 20, 40, 60, 80, 100
* **Horizontal Lines:**
* Green dashed line: "Human Best" (appears at approximately 92% on all charts)
* Olive dashed line: "Human Average" (appears at approximately 67% on all charts except the "All Tasks" chart, where it's at approximately 65%)
* Brown dashed line: "Random" (appears at approximately 25% on all charts)
* **Legend:** (Located in the top-right corner of the "All Tasks" chart, and implied to be the same for all charts)
* Gray: Direct
* Blue: CoT
* Purple: CoC (ours)
* Red: CoC (Python)
### Detailed Analysis
**1. All Tasks**
* **Direct (Gray):** Starts at approximately 33%, dips slightly to 32% at b-1, then increases to 42% at c-1, and reaches approximately 55% at d-3.
* **CoT (Blue):** Starts at approximately 27%, remains relatively stable at 27% at b-1, increases to 33% at c-1, and reaches approximately 52% at d-3.
* **CoC (ours) (Purple):** Starts at approximately 34%, increases to 38% at b-1, then increases to 48% at c-1, and reaches approximately 63% at d-3.
* **CoC (Python) (Red):** Starts at approximately 18%, decreases slightly to 17% at b-1, increases to 21% at c-1, and reaches approximately 48% at d-3.
**2. NLP Tasks**
* **Direct (Gray):** Starts at approximately 38%, increases to 48% at b-1, then increases to 50% at c-1, and reaches approximately 72% at d-3.
* **CoT (Blue):** Starts at approximately 33%, increases to 35% at b-1, then increases to 37% at c-1, and reaches approximately 71% at d-3.
* **CoC (ours) (Purple):** Starts at approximately 34%, increases to 35% at b-1, then increases to 38% at c-1, and reaches approximately 73% at d-3.
* **CoC (Python) (Red):** Starts at approximately 12%, decreases to 8% at b-1, then increases to 9% at c-1, and reaches approximately 17% at d-3.
**3. Alg Tasks**
* **Direct (Gray):** Starts at approximately 22%, remains relatively stable at 22% at b-1, then increases to 23% at c-1, and reaches approximately 40% at d-3.
* **CoT (Blue):** Starts at approximately 21%, increases slightly to 24% at b-1, then increases to 26% at c-1, and reaches approximately 70% at d-3.
* **CoC (ours) (Purple):** Starts at approximately 25%, increases to 45% at b-1, then increases to 50% at c-1, and reaches approximately 85% at d-3.
* **CoC (Python) (Red):** Starts at approximately 23%, increases to 48% at b-1, then increases to 65% at c-1, and reaches approximately 80% at d-3.
**4. Cross-task Prompted**
* **Direct (Gray):** Starts at approximately 27%, remains relatively stable at 27% at b-1, then increases to 30% at c-1, and reaches approximately 45% at d-3.
* **CoT (Blue):** Starts at approximately 20%, decreases slightly to 19% at b-1, then increases to 23% at c-1, and reaches approximately 55% at d-3.
* **CoC (ours) (Purple):** Starts at approximately 28%, increases to 28% at b-1, then increases to 38% at c-1, and reaches approximately 63% at d-3.
* **CoC (Python) (Red):** Starts at approximately 13%, decreases slightly to 12% at b-1, then increases to 14% at c-1, and reaches approximately 40% at d-3.
### Key Observations
* Across all task categories, the performance of all models generally increases as the model scale (parameters) increases from a-1 to d-3.
* The "Human Best" performance is consistently around 92% across all task categories.
* The "Human Average" performance varies slightly, being around 65% for "All Tasks" and around 67% for the other task categories.
* The "Random" performance is consistently around 25% across all task categories.
* CoC (ours) generally outperforms CoT and Direct across all tasks, especially at larger model scales.
* CoC (Python) shows varying performance depending on the task category. It performs poorly on NLP tasks but shows significant improvement on Alg tasks.
### Interpretation
The charts demonstrate the impact of model scale on the performance of different models across various task categories. The CoC (ours) model appears to be the most effective, consistently outperforming other models as the model scale increases. The CoC (Python) model's performance is highly task-dependent, suggesting it may be better suited for certain types of tasks (e.g., Alg tasks) than others (e.g., NLP tasks). The comparison with "Human Best," "Human Average," and "Random" performance levels provides a benchmark for evaluating the models' effectiveness. The data suggests that increasing model scale generally leads to improved performance, but the choice of model and task category significantly influences the overall results.
</details>
Figure 7: Average performance with model scaling, from text-ada-001 (smallest) to text-davinci-003 (largest).
Question 6: Instruction Tuned Models. The reason why we chose text-davinci-003, a completion model, as our primary evaluation model, over more advanced instruction tuned models (gpt-3.5-turbo and gpt-4) is that the former is more amenable to few-shot prompting with examples, which is the main evaluation paradigm for BIG-Bench Hard. However, we still made our best attempt to evaluate our method with the instruction tuned models using two different setups. The first is zero-shot prompting, where we directly prompt the models via the system message to output direct answers, chain of thoughts, or pseudocode/code (which we optionally execute with the python interpreter and feed back the results). The second is few-shot prompting, where we coerce the models to behave like completion models via the system message, and feed the few-shot examples as usual. In both cases, we demonstrated that CoC brings noticeable benefits with little modification needed. See Sec. A.4 for more details.
Question 7: Robustness of Chain of Code We showed that CoC is generally robust against prompt variation by evaluating with different prompts independently written by three annotators on the same set of problems. Specifically, we select four representative tasks from BIG-Bench Hard that require generation of new code (as opposed to repeated code). While the performance of individual tasks has some variance, the average performance across the four tasks only vary within a few percentage points. See Sec. A.5 for more details.
Question 8: Beyond Language Reasoning We showed that CoC is well-suited for tasks that require both semantic and algorithmic reasoning beyond language reasoning, such as robotics. The unique advantage of CoC in robotics is that it interact seamlessly with the robot perception and control APIs via python code such as running object detectors or invoking parameterized robot skills, while performing semantic subtasks in an “inline” fashion (e.g. classifying what trash is compostable before picking them). When equipped with the necessary robot APIs, and a single example in the prompt to teach LMs the format, CoC can solve seven different robot manipulation tasks in the real world, showcasing generalization to new objects, languages and task domains. See Sec. A.6 for more details.
4 Related Work
Language Model Reasoning The abilities and applications of language models have seen significant progress, due to their overall performance (Chowdhery et al., 2022; Touvron et al., 2023; Radford et al., 2019; Gemini Team, 2023) and emergent capabilities (Wei et al., 2022a), such as few-shot prompting (Brown et al., 2020) and abstract reasoning (Wei et al., 2022b). Perhaps most related to this work, a number of works have leveraged prompting to improve reasoning (Dohan et al., 2022): Chain of Thought (Wei et al., 2022b) proposes to break a task down into intermediate reasoning steps, least-to-most (Zhou et al., 2022a) proposes a series of increasingly simpler problems, and ScratchPad (Nye et al., 2021) proposes to maintain a trace of intermediate results for interpreting code (this first demonstrated the code simulation ability of LMs required for our LMulator). Along these lines “let’s think step by step” (Kojima et al., 2022) uses a few key words to elicit such break downs (words that were later refined to “Take a deep breath and work on this problem step-by-step” in (Yang et al., 2023)). Beyond these, other approaches structure such step-by-step solutions into graphical structures (Yao et al., 2023; Besta et al., 2023), plans (Wang et al., 2023b; Ning et al., 2023), or mixture of expert-based sampling (Wang et al., 2022; Zhou et al., 2022b). CoC builds upon the intuition of these works, with the observation that code is a formal, structured approach to breaking a problem down into sub-steps with many advantages beyond natural language alone.
Language Model Tool Use Many recent works have proposed techniques for language models to use tools to respond to queries (Mialon et al., 2023). These tools have often been provided to the language model through prompting (Cobbe et al., 2021; Khot et al., 2022; Chowdhery et al., 2022; Drori et al., 2022; Yao et al., 2022), enabling tools like calculators for math problems, code interpreters, databases, or more. These tools too can provide feedback on novel modalities (Surís et al., 2023; Zeng et al., 2022). To expand the range of tools available, others have used external tool databases or finetuned language models (Schick et al., 2023; Qin et al., 2023; Parisi et al., 2022; Paranjape et al., 2023). As tool interfaces vary, feedback from the tool too can improve performance (Gou et al., 2023; Zhou et al., 2023). In this work we leverage the expressibility and generality of full code as well as its structure, by treating it both as a tool and as a framework.
Language Model Program Synthesis The ability of language models to code is well known and they have been applied as programming assistants (Chen et al., 2021) and shown to be capable programmers on their own (Austin et al., 2021; Li et al., 2022; Nijkamp et al., 2022). This ability has been applied to a variety of tasks outside of language alone, leveraging their ability to reason through code in new settings, such as robotics (Liang et al., 2023; Singh et al., 2023), embodied agents (Wang et al., 2023a), or vision (Surís et al., 2023). Others have specifically done so for reasoning, such as Program of Thoughts (Chen et al., 2022) and Program-aided Language Models (Gao et al., 2023), which generate code to solve numerical reasoning problems. Herein, we focus on the interplay between writing code, running code, and language models simulating code, thus enabling new regimes of language model code applications, such as semantic reasoning.
5 Conclusions, Limitations, and Future Work
We have proposed Chain of Code, an approach towards reasoning with language models through writing code, and executing code either with an interpreter or with a language model that simulates the execution (termed herein an LMulator) if the code is not executable. As such, CoC can leverage both the expressive structure of code and the powerful tools available to it. Beyond this, by simulating the execution of non-executable code, CoC can apply to problems nominally outside the scope of code (e.g., semantic reasoning problems). We have demonstrated that this approach outperforms baselines, and for some tasks even the best human raters, in a range of challenging language and numeric reasoning problems.
This work is not without its limitations. First, generating and executing in two steps as well as interweaving code and language execution requires additional context length and computation time. Second, though we have not seen any loss of performance for semantic tasks in aggregate, there are few tasks in which code doesn’t help, e.g., the task Ruin Names, which asks whether an edit for a name is humorous. Finally, our implementation to interweave LM and code is quite simple, tracking the program state in strings and parsing the strings into Python’s built-in data types (e.g., dict, tuple). As our method stands now, the LM cannot modify custom Python objects while simulating code execution. In theory, however, it is doable as long as each of these Python objects have a serialization and deserialization method, e.g., using techniques like Protocol Buffers.
There are many avenues for future work with CoC. First, we believe that a unified code and language interpreter well combines the commonsense of language models with the analytical abilities, structure, and interpretability of code. Such a technology can thus enable applications of code and code-like reasoning to novel problem regimes, beyond simple reasoning. Second, we are interested in investigating the degree to which finetuning a language model to be an LMulator can benefit semantic code reasoning. Third, we see evidence that reasoning through many pathways yields improvements, which is a promising step forward. Finally, we believe this integration with code enables access to external modalities, such as vision or databases, and represents a interesting path for new applications (e.g., robotics, augmented reality).
Impact Statement
This paper presents work whose goal is to advance the field of Machine Learning. There are many potential societal consequences of our work, most of which are related to the usage of large language models (LLMs). One aspect of Chain of Code that warrants further discussion is that CoC executes the output of LLMs using the Python interpreter as if they are always benign code. If deployed in the wild, however, Chain of Code will need to install additional safeguards against potentially harmful code from LLMs that might be maliciously prompted, before running the code.
References
- Austin et al. (2021) Austin, J., Odena, A., Nye, M., Bosma, M., Michalewski, H., Dohan, D., Jiang, E., Cai, C., Terry, M., Le, Q., et al. Program synthesis with large language models. arXiv preprint arXiv:2108.07732, 2021.
- Besta et al. (2023) Besta, M., Blach, N., Kubicek, A., Gerstenberger, R., Gianinazzi, L., Gajda, J., Lehmann, T., Podstawski, M., Niewiadomski, H., Nyczyk, P., et al. Graph of thoughts: Solving elaborate problems with large language models. arXiv preprint arXiv:2308.09687, 2023.
- Brown et al. (2020) Brown, T., Mann, B., Ryder, N., Subbiah, M., Kaplan, J. D., Dhariwal, P., Neelakantan, A., Shyam, P., Sastry, G., Askell, A., et al. Language models are few-shot learners. Advances in neural information processing systems, 33:1877–1901, 2020.
- Chen et al. (2021) Chen, M., Tworek, J., Jun, H., Yuan, Q., Pinto, H. P. d. O., Kaplan, J., Edwards, H., Burda, Y., Joseph, N., Brockman, G., et al. Evaluating large language models trained on code. arXiv preprint arXiv:2107.03374, 2021.
- Chen et al. (2022) Chen, W., Ma, X., Wang, X., and Cohen, W. W. Program of thoughts prompting: Disentangling computation from reasoning for numerical reasoning tasks. arXiv preprint arXiv:2211.12588, 2022.
- Chowdhery et al. (2022) Chowdhery, A., Narang, S., Devlin, J., Bosma, M., Mishra, G., Roberts, A., Barham, P., Chung, H. W., Sutton, C., Gehrmann, S., et al. Palm: Scaling language modeling with pathways. arXiv preprint arXiv:2204.02311, 2022.
- Cobbe et al. (2021) Cobbe, K., Kosaraju, V., Bavarian, M., Chen, M., Jun, H., Kaiser, L., Plappert, M., Tworek, J., Hilton, J., Nakano, R., et al. Training verifiers to solve math word problems. arXiv preprint arXiv:2110.14168, 2021.
- Dohan et al. (2022) Dohan, D., Xu, W., Lewkowycz, A., Austin, J., Bieber, D., Lopes, R. G., Wu, Y., Michalewski, H., Saurous, R. A., Sohl-Dickstein, J., et al. Language model cascades. arXiv preprint arXiv:2207.10342, 2022.
- Drori et al. (2022) Drori, I., Zhang, S., Shuttleworth, R., Tang, L., Lu, A., Ke, E., Liu, K., Chen, L., Tran, S., Cheng, N., et al. A neural network solves, explains, and generates university math problems by program synthesis and few-shot learning at human level. Proceedings of the National Academy of Sciences, 119(32):e2123433119, 2022.
- Gao et al. (2023) Gao, L., Madaan, A., Zhou, S., Alon, U., Liu, P., Yang, Y., Callan, J., and Neubig, G. Pal: Program-aided language models. In International Conference on Machine Learning, pp. 10764–10799. PMLR, 2023.
- Gemini Team (2023) Gemini Team, G. Gemini: A family of highly capable multimodal models. Technical report, Google, 2023. URL https://storage.googleapis.com/deepmind-media/gemini/gemini_1_report.pdf.
- Google et al. (2023) Google, Anil, R., Dai, A. M., Firat, O., Johnson, M., Lepikhin, D., Passos, A., Shakeri, S., Taropa, E., Bailey, P., Chen, Z., et al. Palm 2 technical report. arXiv preprint arXiv:2305.10403, 2023.
- Gou et al. (2023) Gou, Z., Shao, Z., Gong, Y., Shen, Y., Yang, Y., Duan, N., and Chen, W. Critic: Large language models can self-correct with tool-interactive critiquing. arXiv preprint arXiv:2305.11738, 2023.
- Khot et al. (2022) Khot, T., Trivedi, H., Finlayson, M., Fu, Y., Richardson, K., Clark, P., and Sabharwal, A. Decomposed prompting: A modular approach for solving complex tasks. arXiv preprint arXiv:2210.02406, 2022.
- Kirillov et al. (2023) Kirillov, A., Mintun, E., Ravi, N., Mao, H., Rolland, C., Gustafson, L., Xiao, T., Whitehead, S., Berg, A. C., Lo, W.-Y., Dollár, P., and Girshick, R. Segment anything. arXiv:2304.02643, 2023.
- Kojima et al. (2022) Kojima, T., Gu, S. S., Reid, M., Matsuo, Y., and Iwasawa, Y. Large language models are zero-shot reasoners. Advances in neural information processing systems, 35:22199–22213, 2022.
- Lewkowycz et al. (2022) Lewkowycz, A., Andreassen, A., Dohan, D., Dyer, E., Michalewski, H., Ramasesh, V., Slone, A., Anil, C., Schlag, I., Gutman-Solo, T., et al. Solving quantitative reasoning problems with language models, 2022. arXiv preprint arXiv:2206.14858, 2022. URL https://arxiv.org/abs/2206.14858.
- Li et al. (2022) Li, Y., Choi, D., Chung, J., Kushman, N., Schrittwieser, J., Leblond, R., Eccles, T., Keeling, J., Gimeno, F., Dal Lago, A., et al. Competition-level code generation with alphacode. Science, 378(6624):1092–1097, 2022.
- Liang et al. (2023) Liang, J., Huang, W., Xia, F., Xu, P., Hausman, K., Ichter, B., Florence, P., and Zeng, A. Code as policies: Language model programs for embodied control. In 2023 IEEE International Conference on Robotics and Automation (ICRA), pp. 9493–9500. IEEE, 2023.
- Liu et al. (2023) Liu, S., Zeng, Z., Ren, T., Li, F., Zhang, H., Yang, J., Li, C., Yang, J., Su, H., Zhu, J., et al. Grounding dino: Marrying dino with grounded pre-training for open-set object detection. arXiv preprint arXiv:2303.05499, 2023.
- Mialon et al. (2023) Mialon, G., Dessì, R., Lomeli, M., Nalmpantis, C., Pasunuru, R., Raileanu, R., Rozière, B., Schick, T., Dwivedi-Yu, J., Celikyilmaz, A., et al. Augmented language models: a survey. arXiv preprint arXiv:2302.07842, 2023.
- Min et al. (2022) Min, S., Lyu, X., Holtzman, A., Artetxe, M., Lewis, M., Hajishirzi, H., and Zettlemoyer, L. Rethinking the role of demonstrations: What makes in-context learning work? arXiv preprint arXiv:2202.12837, 2022.
- Mirchandani et al. (2023) Mirchandani, S., Xia, F., Florence, P., Ichter, B., Driess, D., Arenas, M. G., Rao, K., Sadigh, D., and Zeng, A. Large language models as general pattern machines. arXiv preprint arXiv:2307.04721, 2023.
- Nijkamp et al. (2022) Nijkamp, E., Pang, B., Hayashi, H., Tu, L., Wang, H., Zhou, Y., Savarese, S., and Xiong, C. Codegen: An open large language model for code with multi-turn program synthesis. arXiv preprint arXiv:2203.13474, 2022.
- Ning et al. (2023) Ning, X., Lin, Z., Zhou, Z., Yang, H., and Wang, Y. Skeleton-of-thought: Large language models can do parallel decoding. arXiv preprint arXiv:2307.15337, 2023.
- Nye et al. (2021) Nye, M., Andreassen, A. J., Gur-Ari, G., Michalewski, H., Austin, J., Bieber, D., Dohan, D., Lewkowycz, A., Bosma, M., Luan, D., et al. Show your work: Scratchpads for intermediate computation with language models. arXiv preprint arXiv:2112.00114, 2021.
- OpenAI (2023) OpenAI. Gpt-4 technical report, 2023.
- Paranjape et al. (2023) Paranjape, B., Lundberg, S., Singh, S., Hajishirzi, H., Zettlemoyer, L., and Ribeiro, M. T. Art: Automatic multi-step reasoning and tool-use for large language models. arXiv preprint arXiv:2303.09014, 2023.
- Parisi et al. (2022) Parisi, A., Zhao, Y., and Fiedel, N. Talm: Tool augmented language models. arXiv preprint arXiv:2205.12255, 2022.
- Qin et al. (2023) Qin, Y., Liang, S., Ye, Y., Zhu, K., Yan, L., Lu, Y., Lin, Y., Cong, X., Tang, X., Qian, B., et al. Toolllm: Facilitating large language models to master 16000+ real-world apis. arXiv preprint arXiv:2307.16789, 2023.
- Radford et al. (2019) Radford, A., Wu, J., Child, R., Luan, D., Amodei, D., Sutskever, I., et al. Language models are unsupervised multitask learners. OpenAI blog, 1(8):9, 2019.
- Schick et al. (2023) Schick, T., Dwivedi-Yu, J., Dessì, R., Raileanu, R., Lomeli, M., Zettlemoyer, L., Cancedda, N., and Scialom, T. Toolformer: Language models can teach themselves to use tools. arXiv preprint arXiv:2302.04761, 2023.
- Singh et al. (2023) Singh, I., Blukis, V., Mousavian, A., Goyal, A., Xu, D., Tremblay, J., Fox, D., Thomason, J., and Garg, A. Progprompt: Generating situated robot task plans using large language models. In 2023 IEEE International Conference on Robotics and Automation (ICRA), pp. 11523–11530. IEEE, 2023.
- Srivastava et al. (2022) Srivastava, A., Rastogi, A., Rao, A., Shoeb, A. A. M., Abid, A., Fisch, A., Brown, A. R., Santoro, A., Gupta, A., Garriga-Alonso, A., et al. Beyond the imitation game: Quantifying and extrapolating the capabilities of language models. arXiv preprint arXiv:2206.04615, 2022.
- Surís et al. (2023) Surís, D., Menon, S., and Vondrick, C. Vipergpt: Visual inference via python execution for reasoning. arXiv preprint arXiv:2303.08128, 2023.
- Suzgun et al. (2022) Suzgun, M., Scales, N., Schärli, N., Gehrmann, S., Tay, Y., Chung, H. W., Chowdhery, A., Le, Q. V., Chi, E. H., Zhou, D., et al. Challenging big-bench tasks and whether chain-of-thought can solve them. arXiv preprint arXiv:2210.09261, 2022.
- Touvron et al. (2023) Touvron, H., Lavril, T., Izacard, G., Martinet, X., Lachaux, M.-A., Lacroix, T., Rozière, B., Goyal, N., Hambro, E., Azhar, F., et al. Llama: Open and efficient foundation language models. arXiv preprint arXiv:2302.13971, 2023.
- Wang et al. (2023a) Wang, G., Xie, Y., Jiang, Y., Mandlekar, A., Xiao, C., Zhu, Y., Fan, L., and Anandkumar, A. Voyager: An open-ended embodied agent with large language models. arXiv preprint arXiv:2305.16291, 2023a.
- Wang et al. (2023b) Wang, L., Xu, W., Lan, Y., Hu, Z., Lan, Y., Lee, R. K.-W., and Lim, E.-P. Plan-and-solve prompting: Improving zero-shot chain-of-thought reasoning by large language models. arXiv preprint arXiv:2305.04091, 2023b.
- Wang et al. (2022) Wang, X., Wei, J., Schuurmans, D., Le, Q., Chi, E., Narang, S., Chowdhery, A., and Zhou, D. Self-consistency improves chain of thought reasoning in language models. arXiv preprint arXiv:2203.11171, 2022.
- Wei et al. (2022a) Wei, J., Tay, Y., Bommasani, R., Raffel, C., Zoph, B., Borgeaud, S., Yogatama, D., Bosma, M., Zhou, D., Metzler, D., et al. Emergent abilities of large language models. arXiv preprint arXiv:2206.07682, 2022a.
- Wei et al. (2022b) Wei, J., Wang, X., Schuurmans, D., Bosma, M., Xia, F., Chi, E., Le, Q. V., Zhou, D., et al. Chain-of-thought prompting elicits reasoning in large language models. Advances in Neural Information Processing Systems, 35:24824–24837, 2022b.
- Yang et al. (2023) Yang, C., Wang, X., Lu, Y., Liu, H., Le, Q. V., Zhou, D., and Chen, X. Large language models as optimizers. arXiv preprint arXiv:2309.03409, 2023.
- Yao et al. (2022) Yao, S., Zhao, J., Yu, D., Du, N., Shafran, I., Narasimhan, K., and Cao, Y. React: Synergizing reasoning and acting in language models. arXiv preprint arXiv:2210.03629, 2022.
- Yao et al. (2023) Yao, S., Yu, D., Zhao, J., Shafran, I., Griffiths, T. L., Cao, Y., and Narasimhan, K. Tree of thoughts: Deliberate problem solving with large language models. arXiv preprint arXiv:2305.10601, 2023.
- Zeng et al. (2022) Zeng, A., Attarian, M., Ichter, B., Choromanski, K., Wong, A., Welker, S., Tombari, F., Purohit, A., Ryoo, M., Sindhwani, V., et al. Socratic models: Composing zero-shot multimodal reasoning with language. arXiv preprint arXiv:2204.00598, 2022.
- Zhou et al. (2023) Zhou, A., Wang, K., Lu, Z., Shi, W., Luo, S., Qin, Z., Lu, S., Jia, A., Song, L., Zhan, M., et al. Solving challenging math word problems using gpt-4 code interpreter with code-based self-verification. arXiv preprint arXiv:2308.07921, 2023.
- Zhou et al. (2022a) Zhou, D., Schärli, N., Hou, L., Wei, J., Scales, N., Wang, X., Schuurmans, D., Cui, C., Bousquet, O., Le, Q., et al. Least-to-most prompting enables complex reasoning in large language models. arXiv preprint arXiv:2205.10625, 2022a.
- Zhou et al. (2022b) Zhou, Y., Lei, T., Liu, H., Du, N., Huang, Y., Zhao, V., Dai, A. M., Le, Q. V., Laudon, J., et al. Mixture-of-experts with expert choice routing. Advances in Neural Information Processing Systems, 35:7103–7114, 2022b.
Appendix A Appendix
A.1 Quantitative results on language reasoning tasks
Table A1 shows the full per-task results across ablations on BIG-Bench Hard (BBH) tasks, as well as broken down by task type and execution type.
{adjustwidth}
.2in.2in Srivastava et al. (2022) Suzgun et al. (2022) Chain of Code BIG-Bench Hard Task Rand. Human (Avg.) Human (Max) Direct CoT Inter-weave try Python except LM state try Python except LM Python LM state LM Boolean Expressions λ+ 50 79 100 88 89 100 100 100 100 95 90 Causal Judgement κ∗ 50 70 100 64 64 56 57 63 0 57 60 Date Understanding κ- 17 77 100 61 84 75 72 74 59 66 57 Disambiguation QA κ/ 33 67 93 70 68 71 67 68 0 67 68 Dyck Languages λ+ 1 48 100 6 50 100 100 99 99 1 7 Formal Fallacies κ∗ 25 91 100 56 56 55 54 55 0 54 56 Geometric Shapes λ+ 12 54 100 48 66 100 100 100 100 13 44 Hyperbaton κ/ 50 75 100 63 64 98 62 55 0 62 55 Logical Deduction λ∗ 23 40 89 49 66 68 79 57 0 79 58 Movie Recommendation κ/ 25 61 90 85 81 80 83 80 0 83 79 Multi-Step Arithmetic λ+ 0 10 25 0 48 100 100 100 100 0 1 Navigate λ∗ 50 82 100 58 94 86 84 68 0 84 68 Object Counting λ- 0 86 100 30 82 96 98 98 98 57 50 Penguins in a Table κ- 0 78 100 62 82 90 88 90 88 71 59 Reasoning about Colored Objects κ- 12 75 100 64 87 78 74 78 64 64 70 Ruin Names κ/ 25 78 100 76 70 55 56 46 0 56 47 Salient Translation Error Detection κ/ 17 37 80 66 61 58 63 64 0 63 64 Snarks κ/ 50 77 100 70 71 76 76 66 0 76 66 Sports Understanding κ/ 50 71 100 72 96 91 93 75 0 93 74 Temporal Sequences λ∗ 25 91 100 38 60 98 93 99 93 93 99 Tracking Shuffled Objects λ- 23 65 100 25 72 100 96 96 96 71 24 Web of Lies λ- 50 81 100 54 100 97 96 96 97 96 50 Word Sorting λ+ 0 63 100 51 50 99 100 99 100 54 54 Task Averages NLP Task (avg) κ 30 71 97 67 74 74 70 68 18 68 63 Algorithmic Task (avg) λ 21 64 92 41 71 95 95 92 80 58 50 All Tasks (avg) 26 68 95 55 72 84 82 80 48 63 57 Execution Type Python exec (same program) + 13 51 85 38 61 100 100 100 100 33 39 Python exec (different program) - 17 77 100 49 84 89 87 89 84 71 52 LM exec (same program) / 36 66 95 72 73 76 71 65 0 71 65 LM exec (different program) ∗ 35 75 98 53 68 72 73 68 19 73 68 $\lambda$ denotes an algorithmic task and $\kappa$ denotes an NLP task (with categories outlined in Suzgun et al. (2022)). $+$ denotes a task where the code between prompts is repeated and can be executed by Python, $-$ denotes a task where the code between prompts must change and can be executed by Python, $/$ denotes a task where the code between prompts is repeated and must be executed by the LM, and $*$ denotes a task where the code between prompts must change and must be executed by the LM.
Table A1: Full results across ablations on BIG-Bench Hard (BBH) tasks.
A.2 Quantitative results on the GSM8K Benchmark
Table A2 shows results on the the grade-school math benchmark (GSM8K) (Cobbe et al., 2021) with direct prompting, Chain of Thought, and Chain of Code. We find that CoC generally outperforms CoT and Direct prompting. Since these tasks are primarily algorithmic and are solved by Python alone, all Chain of Code variants that use Python achieve the same performance – also the same performance shown in Program of Thoughts (Chen et al., 2022).
Table A2: GSM8K (Cobbe et al., 2021) performance (%) with both few-shot prompting with a single task and cross-task. The delta compared to direct prompting is shown in parenthesis.
A.3 Qualitative results on language reasoning tasks
Figure A1 shows the model outputs for a few reasoning tasks from BIG-Bench Hard (BBH) and Figure A2 shows a demonstrative example of date reasoning. These examples are selected to highlight the interweaving execution of the Python interpreter and the LMulator.
(a) Movie Recommendation
(b) Hyperbaton
(c) Logical Deduction
(d) Disambiguation QA
Figure A1: Model outputs for a few reasoning tasks from BIG-Bench Hard (BBH). We observe that CoC can apply to a wide variety of complex reasoning tasks that involve both semantic and numeric reasoning. Red highlight indicates LM generated code being executed by the Python interpreter, and purple highlight indicates LM simulating the code execution.
Direct answer only
Chain of Code
Figure A2: A demonstrative example of how Chain of Code generates code and reasons through an LM-augmented code emulator. Lines evaluated with Python are in red and with an LM are in purple. The chain of thought and direct answers were evaluated with gpt-4 in October 2023, and we note the current model (as of December 2023) writes code to solve this problem and gets the same solution as Chain of Code.
A.4 Instruction Tuned Models
Since most of the results presented in our main paper are using text-davinci-003, a completion model that is particularly amenable to few-shot prompting, one may wonder how CoC can be used with instruction tuned models, like gpt-4 (OpenAI, 2023). Figuring out ways to elicit the desired behavior of CoC from these instruction tuned models (i.e. writing code/pseudocode to solve problems) is non-trivial. We conduct two additional experiments below as our best effort to shed some light on this subject.
Zero-shot prompting. We directly prompt the models with instructions to elicit the desired reasoning approaches. Note that we do not provide few-shot examples in the prompt (hence “zero-shot”). For the baselines, we ask the model to “directly answer” (Direct) or “think step by step” (CoT). For CoC variants, we ask the model to “write python code to help solve the problem, if it’s helpful”. If a program is written, we either run the code with a Python interpreter and then feed the result (or the error message if execution fails) back to the model to determine a final answer (CoC (Python)), or ask the model to simulate the output of code execution as a LMulator (CoC (LM)). The CoC (Python) baseline can be thought of as a comparison to an LM with Python tool use.
Table A3 shows the performance of each. With gpt-3.5-turbo, both CoT and CoC (Python) show benefits over direct prompting, although both are strongly outperformed by CoC (Interweave). With gpt-4, despite the considerable model strength advantage over text-davinci-003, CoC (Interweave) still outperforms, though the gap is narrower. Admittedly, CoC (Interweave) is prompted with three examples whereas the other two are not.
Table A3: Comparisons with instruction tuned models in the chat interface, with and without tool use, denoted as CoC (Python) and CoC (LLM) respectively. The delta compared to CoC with text-davinci-003 is shown in parenthesis. In this experiment, the prompts for gpt-3.5-turbo and gpt-4 only contain a generic, shared system message and do not contain few-shot examples.
| CoC (Interweave) 84 | Direct 51 (-33) | CoT 56 (-28) | CoC (Python) 56 (-28) | CoC (LM) 45 (-39) | Direct 70 (-14) | CoT 78 (-6) | CoC (Python) 82 (-2) | CoC (LM) 75 (-9) |
| --- | --- | --- | --- | --- | --- | --- | --- | --- |
Few-shot prompting. We attempt to coerce the instruction tuned models to behave like completion models by using the following system message: “Pretend you are a completion model that is prompted with three examples. You should follow the pattern of these examples strictly. At the end of your reply, you should always output an answer”. In the user message, we include three examples from the same (single task) or different (cross task) task domains, as well as the query question, exactly the same as how we evaluated the completion models.
Table A4 shows that CoC still brings a sizable performance gain over the Direct and CoT baselines. With gpt-4, the gap is again narrower mainly because the base model already performs quite well and leaves little room for improvement. This experiment suggests a viable way to combine the strength of CoC with that of more advanced instruction tuned models like gpt-4.
Table A4: Applying CoC to instruction tuned models in the chat interface, while coercing them to behave like completion models. The delta compared to direct prompting is shown in parenthesis. In this experiment, the prompts contains a generic, shared system message that asks LMs to behave like completion models, and also three examples from the same or different task domains at the beginning of the user message. as before.
| Prompt | gpt-3.5-turbo Direct | gpt-4 CoT | CoC | Direct | CoT | CoC |
| --- | --- | --- | --- | --- | --- | --- |
| Single task | 47 | 73 (+26) | 79 (+32) | 69 | 88 (+19) | 91 (+22) |
| Cross task | 47 | 60 (+13) | 61 (+14) | 67 | 81 (+14) | 84 (+17) |
A.5 Robustness of Chain of Code
Similar to Chain of Thought prompts, Chain of Code prompts can also come with various forms: e.g. different ways of function decomposition, coding styles, variable names, reasoning pathways, and so on. In this section, we want to analyze whether CoC is robust against variation across prompts.
We invite three annotators that are familiar with Python to write CoC prompts for four representative tasks in BIG-Bench Hard. We select these four tasks because they all require generation of new code (as opposed to repeated code) during test time. As before, for single task evaluation, we prompt LMs with three examples from the same task domain, whereas for cross task evaluation, we prompt LMs with three examples from different task domains (one from each of the other three tasks).
Results in Table A5 show that our method is robust against prompt variation and doesn’t require extensive prompt engineering.
Table A5: Performance variation across prompts written independently by different authors for four representative tasks in BIG-Bench Hard. Our results that CoC is generally robust against prompt variation, allowing for different coding styles and reasoning logic in the few-shot prompts.
| Prompt Single task | Prompt Annotator A B | Date Understanding 73 68 | Logical Deduction 64 54 | Object Counting 92 95 | Penguins in a Table 78 88 | Average 77 76 |
| --- | --- | --- | --- | --- | --- | --- |
| C | 69 | 43 | 90 | 89 | 73 | |
| Cross task | A | 41 | 33 | 67 | 76 | 54 |
| B | 48 | 29 | 78 | 88 | 61 | |
| C | 60 | 30 | 76 | 64 | 57 | |
A.6 Robotics Applications
Downstream applications such as robotics are well fit for CoC as robotics tasks require semantic reasoning and algorithmic reasoning, as well as interfacing with other APIs through code (such as control or perception APIs (Liang et al., 2023)) and with users through natural language. For example, given a task like “sort the fruits by size”, the robot must reason over which items are fruits, sort them by size, and then connect those decisions to actions executable on the robot. CoC (Interweave) is able to solve these challenges with the Python interpreter and the LMulator at runtime, while allowing for more interpretability and fine-grained control of the robot policies.
Environment and Robot Setup. Our environment is a tabletop with small objects (containers, toys, etc) and a UR5 robot arm equipped with a vacuum gripper and a wrist-mounted RGB-D camera. For the purpose of our experiments, the available perception API is detect_objects(), which returns a list of detected objects (probabilities, labels, bounding boxes and segmentation masks) from the wrist camera. This API is implemented with first querying GPT-4V (OpenAI, 2023) for a list of objects, and then using Grounding-SAM (Kirillov et al., 2023; Liu et al., 2023) to localize them. The available control API is pick_place(obj1, obj2), which is a scripted primitive skill that picks up obj1 and places it on top of obj2. There is also a text-to-speech API say(sentence) that allows the robot to communicate with the user.
Experimental Setup. We evaluate with a number of tabletop pick-and-place robotics tasks that involve semantic reasoning. For few-shot prompting, we include a single example: “Serve a meal that follows the user’s dietary restrictions”, so that the language model understands the expected structure as well as the available robot APIs. During test time, we query the model with each of the following instructions.
1. “Pack a lunch box for someone who is on a vegan diet.”
1. “Assemble a sandwich for someone who is vegetarian.”
1. “Gather ingredients for a peanut butter sandwich in a plate.”
1. “Prepare 西红柿炒蛋 in the pot.” (interleaving English and Chinese on purpose)
1. “Place all paper-made objects in the grass-colored container.”
1. “Sort the objects on the table into the compost bin and the recycle bin.”
1. “My steak is too bland. Can you help?”
Results. With a single example in our prompt, we see that our model is able to generalize to new objects, languages, and task domains (see Figure A3 and an example trajectory in Figure A4). Note that for these robotics tasks, unlike the previous language reasoning tasks, our main method CoC (Interweave) is the only capable approach, as the code requires line-by-line interplay between the Python interpreter execution (robot APIs) and the LMulator (commonsense QA like is_compostable).
Figure A3 shows the one-shot prompt as well as the model outputs and how they are executed for a few test instructions.
(a) Given Prompt
(b) Novel Objects
(c) Novel Languages
(d) Novel Tasks
Figure A3: The one-shot prompt as well as the model outputs for a few test instructions for the robotics tasks. When given a single example in the prompt (a), our method can generalize (b-d) to new objects, languages, and task domains. Red highlight indicates LM generated code being executed by the Python interpreter, and purple highlight indicates LM simulating the code execution. Gray text is for illustration purpose only, and not provided to our model. Note that code in the form of robot.<func_name> invokes robot APIs.
<details>
<summary>extracted/5762267/fig/robot_traj_1.jpg Details</summary>
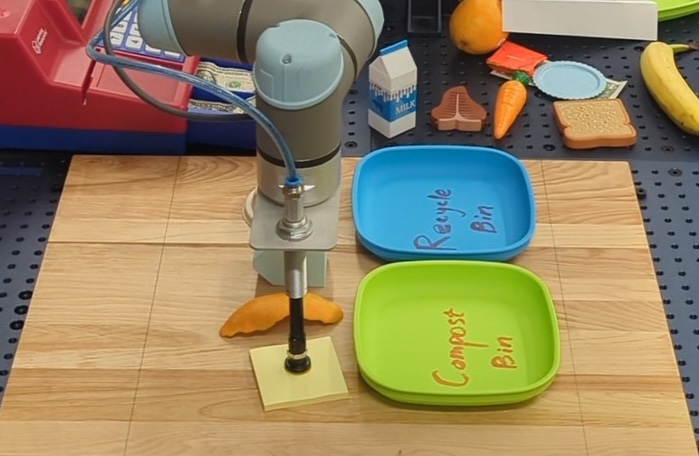
### Visual Description
## Robotic Sorting Task
### Overview
The image depicts a robotic arm performing a sorting task. The robot is positioned above a wooden surface with two bins labeled "Recycle Bin" and "Compost Bin." Various food and non-food items are scattered around the bins, suggesting the robot's task is to sort these items into the appropriate bins.
### Components/Axes
* **Robotic Arm:** A gray robotic arm with a blue pneumatic tube is centrally located in the image. It has a metallic end effector positioned above a yellow sticky note.
* **Recycle Bin:** A blue square bin labeled "Recycle Bin" in blue marker.
* **Compost Bin:** A green square bin labeled "Compost Bin" in orange marker.
* **Wooden Surface:** A light brown wooden surface with a grid of small holes.
* **Items:** Various items are scattered around the bins, including a pear, a milk carton, a steak, a carrot, a plate, a slice of bread, and a banana.
* **Cash Register:** A red and blue cash register is visible in the background on the left.
* **Sticky Note:** A yellow sticky note is placed directly under the robot's end effector.
### Detailed Analysis or ### Content Details
* **Recycle Bin:** The blue "Recycle Bin" is located in the top-right quadrant of the wooden surface. The text "Recycle Bin" is written in a cursive style with blue marker.
* **Compost Bin:** The green "Compost Bin" is located below the "Recycle Bin." The text "Compost Bin" is written in a cursive style with orange marker.
* **Items:**
* Pear: Located in the top-right corner.
* Milk Carton: Located to the left of the pear, labeled "MILK" in blue.
* Steak: Located to the right of the milk carton.
* Carrot: Located to the right of the steak.
* Plate: Located above the bread.
* Bread: Located to the right of the carrot.
* Banana: Located in the top-right corner, to the right of the pear.
* **Cash Register:** The cash register is red on top and blue on the bottom.
* **Sticky Note:** The yellow sticky note is positioned directly under the robot's end effector. A small, orange object is placed on the sticky note.
### Key Observations
* The robot is positioned to pick up the object on the sticky note.
* The items scattered around the bins are a mix of recyclable and compostable materials.
* The scene is set up for a sorting task, with the robot likely programmed to identify and sort the items into the appropriate bins.
### Interpretation
The image demonstrates a robotic system designed for sorting recyclable and compostable materials. The robot's task is to identify the items and place them into the correct bin. The presence of the cash register in the background suggests this system could be used in a retail or food service environment to automate waste sorting. The use of a sticky note under the end effector suggests the robot is currently programmed to pick up that specific item. The setup indicates a controlled environment for testing or demonstrating the robot's sorting capabilities.
</details>
<details>
<summary>extracted/5762267/fig/robot_traj_2.jpg Details</summary>
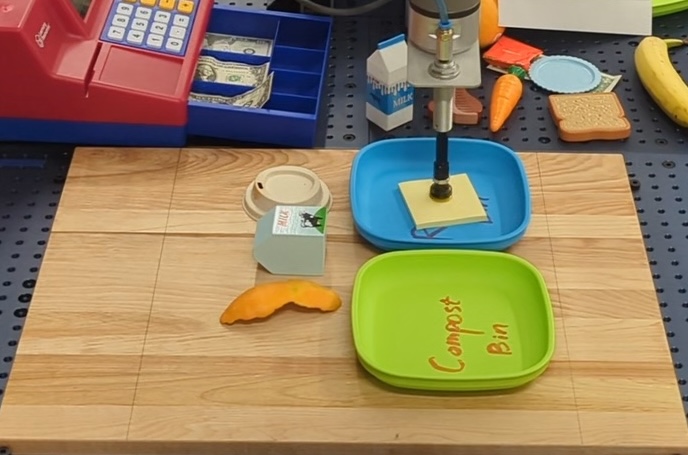
### Visual Description
## Robotic Food Sorting Setup
### Overview
The image depicts a robotic arm interacting with toy food items on a wooden surface. The setup includes a toy cash register, toy food items, and labeled containers, suggesting a simulated food sorting or processing task.
### Components/Axes
* **Wooden Surface:** A grid-lined wooden surface serves as the primary workspace.
* **Robotic Arm:** A robotic arm is positioned above a blue container, holding a tool above a yellow square (likely a piece of cheese).
* **Containers:** There are two containers: a blue container with a piece of cheese and a green container labeled "Compost Bin" in orange marker.
* **Toy Food Items:** Various toy food items are scattered around the workspace, including a banana, carrot, bread, milk carton, coffee cup, and orange peel.
* **Toy Cash Register:** A red and blue toy cash register is located in the background.
* **Money:** Toy money is visible in the cash register's drawer.
### Detailed Analysis or ### Content Details
* **"Compost Bin" Container:** The green container is labeled "Compost Bin" in orange marker.
* **Blue Container:** The blue container holds a yellow square, likely representing a slice of cheese.
* **Toy Milk Carton:** There are two toy milk cartons, one near the coffee cup and another near the robotic arm. Both have "MILK" printed on them.
* **Cash Register:** The toy cash register is red and blue, with buttons labeled with numbers.
* **Money:** The cash register drawer contains toy dollar bills.
### Key Observations
* The robotic arm appears to be in the process of picking up or placing the cheese slice.
* The presence of the "Compost Bin" suggests a sorting task where items are being separated for disposal.
* The toy food items are scattered, indicating they are yet to be sorted.
### Interpretation
The image likely represents a simulated food sorting task using a robotic arm. The setup suggests a scenario where the robot is programmed to identify and sort different food items, potentially separating compostable items from non-compostable ones. The presence of the cash register and money could indicate a simulated transaction or inventory management aspect to the task. The scene is likely part of a demonstration or experiment involving robotics, computer vision, or artificial intelligence in the context of food handling or waste management.
</details>
<details>
<summary>extracted/5762267/fig/robot_traj_3.jpg Details</summary>

### Visual Description
## Robotic Sorting Task
### Overview
The image depicts a robotic arm sorting food items into different containers. The robot is holding a piece of orange peel and is positioned above a green container labeled "Compost Bin". Other food items and containers are visible on the table.
### Components/Axes
* **Robotic Arm:** A robotic arm with a suction cup end effector is positioned above the table.
* **Suction Cup:** The end effector is a suction cup, currently holding a piece of orange peel.
* **Compost Bin:** A green container labeled "Compost Bin" in orange marker.
* **Blue Container:** A blue container with a yellow square (possibly cheese or butter) inside.
* **Table:** A wooden table with a grid pattern.
* **Food Items:** Various food items are scattered on the table, including a milk carton, steak, carrot, plate, bread, orange, and banana.
* **Cash Register:** A red cash register is visible in the background on the left.
### Detailed Analysis or ### Content Details
* **Compost Bin:** The green container is labeled "Compost Bin" in orange marker. It is located in the bottom-right quadrant of the table.
* **Blue Container:** The blue container is located above the compost bin and contains a yellow square.
* **Food Items:**
* A small milk carton labeled "MILK" is located to the right of the robotic arm.
* A toy steak is located to the right of the milk carton.
* A toy carrot is located to the right of the steak.
* A toy plate is located to the right of the carrot.
* A toy piece of bread is located to the right of the plate.
* An orange and a banana are located to the right of the bread.
* **Cash Register:** The red cash register is located in the top-left corner of the image.
### Key Observations
* The robotic arm is in the process of placing the orange peel into the compost bin.
* The presence of various food items suggests a sorting task based on food type or condition.
* The cash register in the background suggests a possible retail or grocery store setting.
### Interpretation
The image demonstrates a robotic system designed for sorting food items, likely for waste management or inventory purposes. The robot is programmed to identify and separate compostable items, as evidenced by the orange peel being placed in the "Compost Bin". The presence of other food items and containers suggests a more complex sorting process is underway. The cash register in the background implies this system could be used in a retail environment to automate waste disposal or manage food inventory. The use of toy food items suggests this may be a demonstration or training setup.
</details>
<details>
<summary>extracted/5762267/fig/robot_traj_4.jpg Details</summary>

### Visual Description
## Robotic Food Preparation
### Overview
The image depicts a robotic arm dispensing a substance, likely food, into a green plate. The setup includes various objects such as a cash register, toy money, a milk carton, and other food items, suggesting a simulated or playful environment for testing robotic food preparation.
### Components/Axes
* **Robotic Arm:** A robotic arm with a dispensing nozzle positioned above a green plate.
* **Green Plate:** Contains an orange substance dispensed by the robotic arm. The substance appears to be in the shape of letters, possibly spelling "Cat".
* **Blue Plate:** Located to the left of the green plate, containing a yellow square object.
* **Milk Carton:** A small milk carton with an image of a cow on it. The carton is positioned to the left of the blue plate. The label on the carton reads "MILK".
* **Coffee Cup:** A disposable coffee cup with a lid, placed next to the milk carton.
* **Cash Register:** A red and blue toy cash register is located in the upper-left corner of the image.
* **Toy Money:** Toy money is visible in a blue tray behind the cash register.
* **Other Food Items:** A banana, a slice of bread, an orange slice, and a blue plate are arranged in the background.
* **Wooden Surface:** The objects are placed on a wooden surface that appears to be a table or countertop.
### Detailed Analysis or Content Details
* The robotic arm is positioned to dispense the orange substance into the green plate.
* The orange substance is spread out in a somewhat circular shape, with the letters "Cat" visible within the substance.
* The milk carton has a label that reads "MILK" and features an image of a cow.
* The cash register and toy money suggest a play or simulated environment.
* The other food items are arranged in the background, possibly as part of the simulated food preparation scenario.
### Key Observations
* The robotic arm is the central focus of the image, suggesting its role in dispensing or preparing food.
* The presence of toy money and a cash register indicates a simulated or playful environment.
* The arrangement of the food items and plates suggests a food preparation or serving scenario.
### Interpretation
The image likely demonstrates a robotic system being tested or used in a simulated food preparation environment. The robotic arm is shown dispensing a substance into a plate, while other food items and a cash register are present to create a realistic scenario. The setup could be used for testing the robot's precision, speed, or ability to handle different food items. The "Cat" shape in the orange substance may be a test of the robot's ability to create specific shapes or patterns.
</details>
Figure A4: Robot trajectory visualization for task “sort the objects on the table into the compost bin and the recycle bin”. CoC first generates code to solve the problem, and then executes the code with Python if possible (e.g., robot APIs like detect_objects and pick_place), and with LMulator if not (e.g., commonsense QA like is_compostable). The robot successfully picks and places the Post-it note to the recycle bin and the orange peel to the compost bin. See the full code in Fig. A3.