#
\makeFNbottom
<details>
<summary>x1.png Details</summary>

### Visual Description
## Chart/Diagram Type: Empty Image
### Overview
The image is completely white and contains no visible elements, data, or text.
### Components/Axes
There are no axes, labels, legends, or any other identifiable components.
### Detailed Analysis or ### Content Details
Since the image is blank, there are no specific values, trends, or distributions to analyze.
### Key Observations
The key observation is the absence of any visual information.
### Interpretation
The image provides no data or information. It is essentially a blank canvas. There is nothing to interpret in terms of relationships, trends, or anomalies.
</details>
<details>
<summary>x2.png Details</summary>
### Visual Description
## [Image Type]: Black Image
### Overview
The image is a solid black rectangle, containing no visible content or information.
### Components/Axes
There are no components, axes, labels, or legends present.
### Detailed Analysis or ### Content Details
There are no details to analyze, as the image is uniformly black.
### Key Observations
The only observation is the absence of any visual content.
### Interpretation
The image provides no data or information. It is simply a black void.
</details>
<details>
<summary>x3.png Details</summary>

### Visual Description
## Text Block: Article Type
### Overview
The image is a solid block of color with text overlaid. The background color is a muted blue-gray. The text is white.
### Components/Axes
The text reads "ARTICLE TYPE".
### Detailed Analysis or ### Content Details
The text is left-aligned and positioned in the top-left portion of the image.
### Key Observations
The image contains only text and a background color.
### Interpretation
The image likely serves as a header or label, indicating the type of content that follows. It is a simple design element.
</details>
|
<details>
<summary>x4.png Details</summary>

### Visual Description
Icon/Small Image (327x28)
</details>
| Curvature induces and enhances transport of spinning colloids through narrow channels † |
| --- | --- |
| Eric Cereceda-López, a,b Marco De Corato, c Ignacio Pagonabarraga, a,d Fanlong Meng, e,f,g Pietro Tierno, ∗,a,b,d and Antonio Ortiz-Ambriz, ∗,h | |
|
<details>
<summary>x5.png Details</summary>
### Visual Description
## Text Snippet: Publication Information
### Overview
The image contains text related to publication information, including received date, accepted date, and DOI.
### Content Details
The image contains the following text:
* "Received Date"
* "Accepted Date"
* "DOI: 00.0000/xxxxxxxxxxxxx"
### Interpretation
The text provides metadata about a publication, indicating when it was received and accepted, as well as its Digital Object Identifier (DOI). The DOI is partially redacted with "x" characters.
</details>
| The effect of curvature and how it induces and enhances the transport of colloidal particles driven through narrow channels represent an unexplored research avenue. Here we combine experiments and simulations to investigate the dynamics of magnetically driven colloidal particles confined through a narrow, circular channel. We use an external precessing magnetic field to induce a net torque and spin the particles at a defined angular velocity. Due to the spinning, the particle propulsion emerges from the different hydrodynamic coupling with the inner and outer walls and strongly depends on the curvature. The experimental findings are combined with finite element numerical simulations that predict a positive rotation translation coupling in the mobility matrix. Further, we explore the collective transport of many particles across the curved geometry, making an experimental realization of a driven single file system. With our finding, we elucidate the effect of curvature on the transport of microscopic particles which could be important to understand the complex, yet rich, dynamics of particle systems driven through curved microfluidic channels. |
footnotetext: a Departament de Física de la Matèria Condensada, Universitat de Barcelona, 08028, Spain. E-mail: ptierno@ub.edu footnotetext: b Institut de Nanociència i Nanotecnologia, Universitat de Barcelona (IN2UB), 08028, Barcelona, Spain. footnotetext: c Aragon Institute of Engineering Research (I3A), University of Zaragoza, Zaragoza, Spain. footnotetext: d University of Barcelona Institute of Complex Systems (UBICS), 08028, Barcelona, Spain footnotetext: e Chinese Academy of Sciences, CAS Key Laboratory for Theoretical Physics, Institute of Theoretical Physics, Beijing 100190, China footnotetext: f University of Chinese Academy of Sciences, School of Physical Sciences, Beijing 100049, China footnotetext: g University of Chinese Academy of Sciences, Wenzhou Institute, Wenzhou 325000, China footnotetext: h Tecnologico de Monterrey, School of Science and Engineering, 64849, Monterrey, Mexico. E-mail: aortiza@tec.mx footnotetext: † Electronic Supplementary Information (ESI) available: Two videos illustrating the single and collective particle dynamics within the ring. See DOI: 00.0000/00000000.
1 Introduction
In viscous fluids the Reynold ( $Re$ ) number (the ratio between inertial and viscous forces) is relatively low and the Navier-Stokes equations become effectively time-reversible. 1 Under such conditions, inducing the transport of microscale objects may become problematic since any reciprocal motion, namely a series of body/shape deformations that are identical when reversed, do not produce a net movement. 2 However, many artificial prototypes are often powered by external fields, such as magnetic ones, which indeed induce periodic deformation or translations. Thus, at low $Re$ these systems require a subtle strategy to overcome the time-reversibility and propel, such as the presence of flexibility, 3, 4, 5, 6 non linearity of the dispersing medium, 7, 8 or the interaction between different parts. 9, 10, 11
The problem of propulsion at low $Re$ becomes even more complex when the active object, either a microswimmer or a synthetic self-propelled particle, is confined within a narrow channel. 12 The presence of confining walls can affect the microswimmer dynamics in many ways. In particular, planar surface can attract swimming bacteria due to hydrodynamic interactions, 13, 14 induce circular trajectories, 15, 16 or curved posts can be used as reflecting barriers or traps. 17 Moreover, it has been recently found that the curvature of the fallopian tubes guides the locomotion of sperm cells to promote fertilization, 18 and similar situations are not limited to bacteria or sperm cells, but extend to other types of situations. 19, 20, 21, 22
On the other hand, confinement can be used to rectify the random motion of microswimmers using patterned channels and other ratcheting methods. 23, 24, 25, 26, 27, 28, 29, 30, 31 At low $Re$ , the close proximity of a flat wall can break the spatial symmetry of the flow field and induce propulsion in simpler artificial systems, such as rotating magnetic particles, 32, 33, 34, 35 doublets 36 or elongated structures. 37, 38
Here we show that the geometry of the channel can be used to induce translation of a driven particle by breaking the rotational symmetry of the hydrodynamic interactions. We confine spinning magnetic colloids within narrow circular channels characterized by a width close to the particle diameter. We find that curvature can rectify the particle rotational motion inducing a net translational one. Moreover, these surface rotors are able to translate along the ring at a velocity that depends on the curvature of the channel. We explain this experimental observation using numerical simulations which elucidate the mechanism of motion based on the difference between the hydrodynamic coupling with the two confining walls, where the largest coupling is with the wall characterized by the largest curvature. Further, we investigate the collective propulsion of many driven rotors, and show that within the circular ring the magnetic particles behave as a driven single-file, with an initial diffusive regime followed by a ballistic one at a large time scale.
<details>
<summary>x6.png Details</summary>
### Visual Description
## Microfluidic Device and Particle Dynamics
### Overview
The image presents a two-part illustration of a microfluidic device and the dynamics of a particle within it. Part (a) shows a top-down view of the microfluidic structure, including concentric circular channels and coordinate axes. Part (b) provides a 3D schematic of the device, illustrating the magnetic field, rotation, and a cross-sectional view of a particle trapped in a channel.
### Components/Axes
**Part (a): Microfluidic Structure (Top View)**
* **Concentric Circular Channels:** The image shows several concentric circular channels etched into a substrate.
* **Coordinate Axes:** A coordinate system is superimposed on the image, with the x and y axes intersecting at the center of the circles.
* **Angle Φ:** An angle Φ is marked between the x-axis and a radial line.
* **Arrows:** A red arrow indicates rotation around the y-axis, and a blue arrow indicates rotation around the center of the circular channels.
* **Scale Bar:** A black scale bar is present at the bottom-right of the image.
**Part (b): 3D Schematic and Cross-Section**
* **3D Schematic:** A 3D representation of the microfluidic device shows a circular channel on a rotating platform.
* **Magnetic Field (H):** A blue arrow labeled "H" represents the magnetic field direction.
* **Rotation (Ω and ω):** A red arrow labeled "Ω" indicates the rotation of the magnetic field around the z-axis, and a red arrow labeled "ω" indicates the rotation of the platform.
* **Coordinate Axes:** A coordinate system is shown, with x, y, and z axes.
* **Angle Φ:** An angle Φ is marked between the x-axis and a radial line.
* **Cross-Section:** An inset shows a cross-sectional view of the channel with a particle inside.
* **Vertical Axis:** Labeled "h[µm]", ranging from -4 to 0.
* **Horizontal Axis:** Labeled "ρ[µm]", ranging from 3.5 to 6.5.
* **Channel Profile:** A blue line shows the depth profile of the channel.
* **Particle:** A pink sphere represents the particle trapped within the channel.
### Detailed Analysis
**Part (a): Microfluidic Structure (Top View)**
* The concentric circular channels appear to be etched into a flat substrate.
* The red arrow indicates a rotation around the y-axis.
* The blue arrow indicates a rotation around the center of the circular channels.
**Part (b): 3D Schematic and Cross-Section**
* The magnetic field (H) is oriented at an angle to the z-axis.
* The platform rotates with an angular velocity ω.
* The cross-sectional plot shows the depth (h) of the channel as a function of radial position (ρ).
* The channel depth is approximately -4 µm.
* The channel width is approximately 6.5 µm - 3.5 µm = 3 µm.
* The particle is centered within the channel.
### Key Observations
* The microfluidic device is designed to trap and manipulate particles using a combination of magnetic fields and rotation.
* The cross-sectional plot provides information about the channel geometry and particle position.
### Interpretation
The image illustrates a system for manipulating microparticles within a microfluidic device. The combination of a rotating platform and a magnetic field allows for precise control over the particle's motion. The cross-sectional plot provides a detailed view of the channel geometry and the particle's confinement within the channel. This type of system could be used for a variety of applications, including drug delivery, diagnostics, and materials science. The angles and rotations are critical to understanding the forces acting on the particle. The depth profile of the channel is also important for understanding the particle's confinement.
</details>
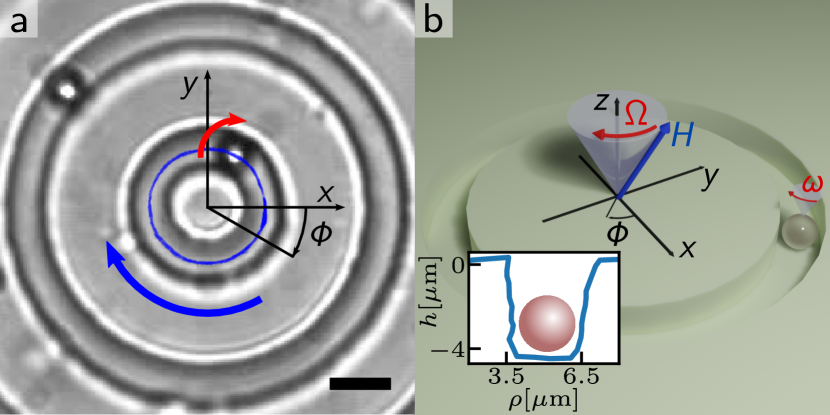
Fig. 1: (a) Optical microscope image of two circular channels in a PDMS mold each with a spinning paramagnetic colloidal particle. The red (blue) arrow in the image indicates the direction of the particle rotation (trajectory). Scale bar is $5\rm{\mu m}$ , see also corresponding Movie S1†in the Supporting Information. (b) Schematic of a particle within the circular channel and of the applied precessing magnetic field $\bm{H}$ . The inset shows the transverse profile of the channel measured using confocal profilometry.
2 Methods
2.1 Experimental protocol
The circular microchannels are realized in Polydimethylsiloxane (PDMS) with soft lithography. We first use commercial software (AUTOCAD) to design a sequence of lithographic channels with a width $w=3\,\rm{\mu m}$ , see Fig. 1 (a). The channels are placed concentrically so that they are always separated by a distance of $10\rm{\mu m}$ . To sample the channels in 5 $\rm{\mu m}$ intervals, the rings are separated in two sets, one starting at $5\,\rm{\mu m}$ and the other at $10\,\rm{\mu m}$ . The microchannels present a depth of $\sim 4\rm{\mu m}$ thus, larger than the particle width, such that the particles are completely surrounded by solid walls, as shown by the confocal profile in Fig. 1 (b).
We use the following procedure to realize the structures in PDMS. First, we fabricate reliefs in SU-8, an epoxy-based negative photoresist, on top of a silicon (Si) wafer. The latter was prepared by dehydrating it for $10$ minutes at $200^{\circ}$ C on a hot plate and then plasma cleaned it for $1$ minute at a pressure of $1$ Torr. After that, a layer of SU-8 $3005$ is spin-coated on top of the Si wafer for $10$ s at $500$ revolution per minute (rpm), followed by spinning at $4000$ rpm for $120$ s, and later baked on a hot plate heated at a temperature of $95^{\circ}$ C for $2$ minutes. The SU-8 is then polymerized by exposure to UV light through a Cromium (Cr) mask for $5.6$ s with a light intensity of $100\,\rm{mJ\,cm^{-2}}$ (Mask aligner, i-line configuration with wavelength $\lambda$ =365nm). Then the exposed film is baked again for $1$ min at $65^{\circ}$ C and for another $1$ min at $95^{\circ}$ C, and developed for $30$ s in propylene glycol methyl ether acetate. We then transfer the obtained master to PDMS by first cleaning the SU-8 structure in a plasma cleaner, operating at a pressure of $1$ Torr for $1$ min, and then silanizing it in a vacuum chamber with a drop of silane (SiH 4) for one hour. After that, the PDMS is spin coated onto the Si wafer at $4000$ rpm during $1$ min and baked for $30$ min above a hot plate at a temperature of $95^{\circ}$ C. The PDMS is then transferred to a cover glass by plasma cleaning both surfaces ( $1$ min at $1$ Torr), then joining the PDMS and the glass and finally peeling very carefully with a sharp blade the resulting PDMS film.
Once the PDMS channels are fabricated, we realize a closed fluidic cell by first painting the PDMS patterned coverglass with two strips of silicon-based vacuum grease. After that, we deposit a drop containing the colloidal particles dispersed in water on top of it, we close it with another clean coverglass and then we seal the two open sides with more grease. The colloidal suspension is prepared by dispersing $1.5\,\rm{\mu l}$ from the stock solution of paramagnetic colloidal particles (Dynabeads M-270, $2.8\rm{\mu m}$ in diameter) in $1\,\rm{ml}$ of ultrapure water (MilliQ system, Millipore).
The fluidic cell is placed on a custom-made inverted optical microscope equipped with optical tweezers that are controlled using two Acousto-Optic Deflectors (AA Optoelectronics DTSXY-400-1064) driven by a radio frequency wave generator (DDSPA2X-D431b-34). The optical tweezers ensure that the channels are filled with the desired number of particles. Since it is often necessary to push the deposited particles out of the channels, the tweezers have been set up to trap from below by driving the laser radiation (Manlight ML5-CW-P/TKS-OTS) through a high numerical aperture objective (Nikon $100×$ , Numerical aperture $1.3$ ). The trapping objective is also used for observation and a custom-made TV lens is mounted in the microscope setup to observe a wide enough field of view, $\sim 100\,\rm{\mu m^{2}}$ .
The external magnetic fields used to spin the particles are applied using a set of five coils, all arranged around the sample. In particular, two coils have the main axis aligned along the $\hat{\bm{x}}$ direction, two for the $\hat{\bm{y}}$ direction and one for the $\hat{\bm{z}}$ direction which is perpendicular to the particle plane ( $\hat{\bm{x}},\hat{\bm{y}}$ ). The sample is placed directly above the coil oriented along the $\hat{\bm{z}}$ axis. The magnetic coils are connected to three power amplifiers (KEPCO BOP 20-10) which are driven by a digital-analog card (cDAQ NI-9269) and controlled with a custom-made LabVIEW program.
2.2 Numerical simulations
To understand the mechanism of propulsion of the rotating particles in the channel, we perform finite element simulations. We consider a sphere suspended in a Newtonian liquid with viscosity $\eta$ and confined in a channel obtained from two concentric cylinders of height $h$ , as schematically depicted in Fig. 3 (a). The Reynolds number, estimated from the characteristic particle velocity in the ring, is vanishingly small and thus we neglect inertial effects. We consider a Cartesian reference frame with origin at the center of the channel (Fig. 1). We assume that the distance between the particle and the bottom wall, $z_{p}$ , is fixed due to the balance between gravitational forces and electrostatic repulsion. The ratio of the lateral size of the channel $w$ and the particle radius is fixed to ${w}/{a}=2.2$ which for our $a=1.4\rm{\mu m}$ particles produces a channel $3.1\rm{\mu m}$ wide, similar to that shown in the inset of 1 b). To model an open channel in the experimental system, we chose $h$ much larger than $w$ . The particle is placed near the bottom of the domain, and horizontally at the center, as depicted in Fig. 3 (a). The rotating magnetic field generates a constant torque $\bm{\tau}_{m}$ along the $\hat{\bm{z}}$ axis, which leads to a constant angular velocity $\omega_{p}$ along the same direction. As a result of the rotation, we expect the particle to translate along the direction that is tangential to the channel centerline, $\hat{\bm{\phi}}$ , due to the hydrodynamic coupling with the channel walls (see Fig. 1 ).
To investigate how the motion of the particle along the channel depends on the radius of curvature, we compute the mobility matrix of the particle. The mobility matrix, $\bm{M}$ , relates the translational ( $\bm{v}_{p}$ ) and angular velocity ( $\bm{\omega}_{p}$ ) of the particle to external forces ( $\bm{F}$ ) and torques ( $\bm{\tau}$ ):
$$
\displaystyle\begin{bmatrix}\bm{v}_{p}\\
\bm{\omega}_{p}\end{bmatrix}=\bm{M}\begin{bmatrix}\bm{F}\\
\bm{\tau}\end{bmatrix}\,\,\,\,. \tag{1}
$$
The mobility matrix, $\bm{M}$ , contains all the information about the hydrodynamic interactions between the particle and the surrounding boundaries. In this particular case, $\bm{M}$ depends on the radius of the channel $R$ . Here, we are interested in the coefficient that couples the magnetic torque, acting along the $\hat{\bm{z}}$ direction, to the translational velocity along the $\hat{\bm{\phi}}$ direction.
To obtain $\bm{M}$ , we first find the resistance matrix $\bm{R}$ , and then compute $\bm{M}$ as $\bm{M}=\bm{R}^{-1}$ . To do so, we solve the Stokes equation by imposing a single component of the velocity vector and then computing the resulting force and torque acting on the particle:
$$
\displaystyle\nabla^{2}\bm{v}-\nabla p=0 \displaystyle\nabla\cdot\bm{v}=0 \tag{2}
$$
where $\bm{v}$ is the velocity of the fluid and $\bm{p}$ is the pressure. We consider no-slip boundary condition on the walls of the domain $\bm{v}|_{\mathcal{S}}=0$ , being $\mathcal{S}$ the surface of the particle. On $\mathcal{S}$ we fix the velocity or the angular velocity. The total forces and torques acting on the particle are computed using:
$$
\displaystyle\int_{\mathcal{S}}\bm{T}\cdot\bm{n}\ \mathrm{d}S=\bm{F} \displaystyle\int_{\mathcal{S}}\left(\bm{r}-\bm{r_{p}}\right)\times\left(\bm{T%
}\cdot\bm{n}\right)\ \mathrm{d}S=\bm{\tau} \tag{4}
$$
where $\bm{r}_{p}=(x_{p},y_{p},z_{p})$ is the position vector of the particle center, $\bm{r}$ is the position of a point on the surface of the particle and $\bm{T}$ is the stress tensor defined as: $\bm{T}=\eta(∇ v+∇ v^{T})-p\bm{I}$ , with $p$ the pressure. By repeating the simulation for all the six components of the velocity vector, we can construct the resistance matrix $\bm{R}$ which is the inverse of the mobility matrix, $\bm{M}=\bm{R}^{-1}$ .
<details>
<summary>x7.png Details</summary>
### Visual Description
## Chart: Velocity vs. Radius
### Overview
The image consists of two parts: a schematic diagram at the top illustrating a sphere moving through different channel geometries, and a graph at the bottom showing the relationship between velocity (v_φ) and radius (R). An inset graph shows v_φ as a function of angle φ for a fixed radius.
### Components/Axes
**Top Schematic Diagrams:**
* Three diagrams showing a sphere (red) moving through a channel (light blue).
* Diagram 1: Sphere moving in a straight channel. Arrows indicate the direction of motion and fluid flow. x and y axes are labeled.
* Diagram 2: Sphere rotating in a straight channel. Arrows indicate the direction of motion, fluid flow, and rotation.
* Diagram 3: Sphere moving in a curved channel. Arrows indicate the direction of motion and fluid flow. Angle φ is labeled.
**Main Chart:**
* **X-axis:** R [µm] (Radius in micrometers). Scale ranges from 0 to 40 µm, with tick marks at 10, 20, 30, and 40 µm.
* **Y-axis:** v_φ [µm s⁻¹] (Velocity in micrometers per second). Scale ranges from 0.00 to 0.15 µm s⁻¹, with tick marks at 0.00, 0.05, 0.10, and 0.15 µm s⁻¹.
* Data points are shown as blue circles with error bars.
* A blue line connects the data points, showing the trend.
* A horizontal line at y = 0.00.
**Inset Chart:**
* **X-axis:** φ [rad] (Angle in radians). Scale ranges from -π to π, with tick marks at -π, -π/2, 0, π/2, and π.
* **Y-axis:** v_φ [µm s⁻¹] (Velocity in micrometers per second). Scale ranges from 0.00 to 0.25 µm s⁻¹.
* Data points are shown as blue squares with error bars.
* A blue line shows the average velocity.
* A horizontal line at y = 0.00.
* Label: R = 5µm
### Detailed Analysis
**Main Chart Data:**
* **Trend:** The blue line shows a decreasing trend in velocity (v_φ) as the radius (R) increases. The velocity drops sharply initially and then plateaus.
* **Data Points:**
* R ≈ 5 µm: v_φ ≈ 0.14 µm s⁻¹
* R ≈ 10 µm: v_φ ≈ 0.05 µm s⁻¹
* R ≈ 20 µm: v_φ ≈ 0.01 µm s⁻¹
* R ≈ 30 µm: v_φ ≈ 0.02 µm s⁻¹
* R ≈ 40 µm: v_φ ≈ 0.00 µm s⁻¹
**Inset Chart Data:**
* **Trend:** The blue line shows a relatively constant velocity (v_φ) as the angle (φ) changes.
* **Data Points:** The data points are scattered around the average velocity line, indicating some variation.
* The average velocity is approximately 0.15 µm s⁻¹.
### Key Observations
* The velocity decreases as the radius increases in the main chart.
* The velocity is relatively constant with respect to the angle in the inset chart.
* The inset chart represents the velocity at a fixed radius of 5 µm.
### Interpretation
The data suggests that the velocity of the sphere is strongly influenced by the radius of the channel. As the channel widens (larger radius), the velocity decreases, possibly due to reduced confinement or changes in the flow profile. The inset chart indicates that, for a fixed radius, the velocity is relatively independent of the angular position. This could imply that the flow is uniform around the sphere at that specific radius. The initial sharp drop in velocity with increasing radius suggests a critical channel size where the confinement effects are most pronounced.
</details>
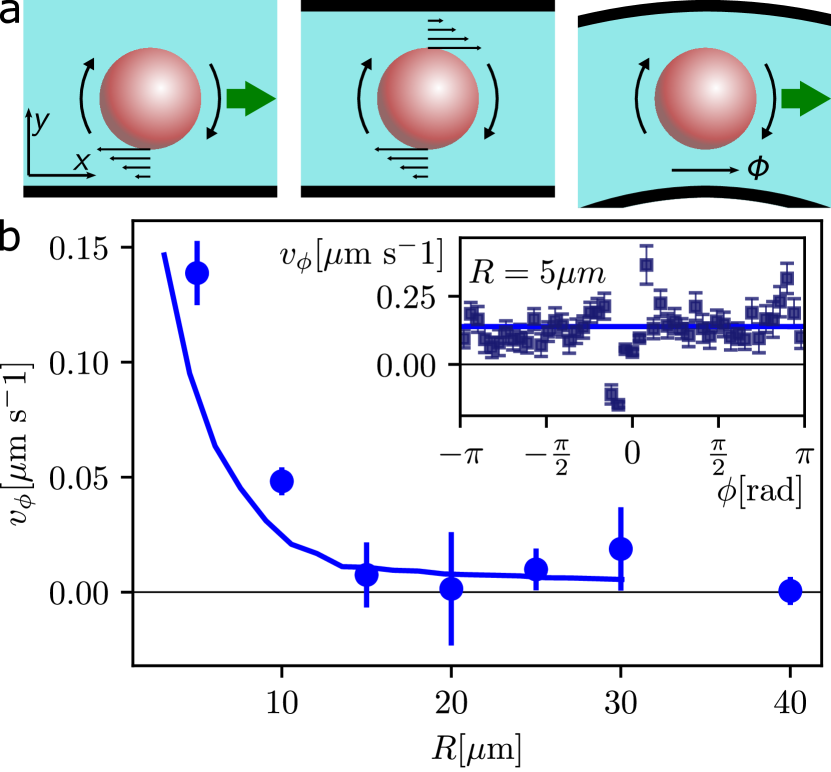
Fig. 2: (a) Schematic showing a spinning particle close to a single, flat wall (left), confined between two flat walls (center) and between two curved walls (right). All three images show the particles from the top view, i.e. the particle rotates in the ( $\hat{\bm{x}},\hat{\bm{y}}$ ) plane. The bottom wall, placed at $z=0$ , is not shown for clarity. (b) Tangential velocity $v_{\phi}$ of the rotating magnetic particle inside the channels for different values of the central radius $R$ . The filled points are experimental measurements, and the continuous line is calculated from the numerical simulations using a magnetic torque equal to $\tau_{m}=0.55\,\rm{pN\,\mu m}$ . The inset shows the mean velocity at each value of the angle for a ring with radius $R=5\,\rm{\mu m}$ . The angle $\phi$ is measured with respect to the $\hat{\bm{x}}$ axis.
<details>
<summary>x8.png Details</summary>
### Visual Description
## Diagram: Cell Confinement and Traction Distribution
### Overview
The image presents a schematic of a cell confined within a microchannel, along with heatmaps illustrating the traction distribution on the outer and inner hemispheres of the cell, and the total traction.
### Components/Axes
* **Panel a:** Schematic diagram of a cell within a microchannel.
* The microchannel is represented in blue.
* A red sphere represents the cell.
* Labels:
* "R": Indicates the radius of the microchannel.
* "w": Indicates the width of the microchannel.
* "h": Indicates the height of the microchannel.
* "in": Indicates the "in" side of the cell.
* "out": Indicates the "out" side of the cell.
* **Panel b:** Heatmap of traction distribution on the outer hemisphere of the cell.
* Label: "Outer hemisphere"
* Color scale: Red indicates negative values, blue indicates positive values.
* Axes:
* Horizontal axis: $\hat{\phi}$
* Vertical axis: $\hat{z}$
* Colorbar: Ranges from -5 to 5, labeled as $N_{\phi}$.
* **Panel c:** Heatmap of traction distribution on the inner hemisphere of the cell.
* Label: "Inner hemisphere"
* Color scale: Red indicates negative values, blue indicates positive values.
* Axes:
* Horizontal axis: $\hat{\phi}$
* Vertical axis: $\hat{z}$
* Colorbar: Ranges from -5 to 5, labeled as $N_{\phi}$.
* **Panel d:** Heatmap of total traction distribution on the cell.
* Label: "Total traction"
* Color scale: Red indicates negative values, blue indicates positive values.
* Axes:
* Horizontal axis: $\hat{\phi}$
* Vertical axis: $\hat{z}$
* Colorbar: Ranges from -2.5 to 2.5, labeled as $N_{\phi}$.
### Detailed Analysis
* **Panel a:** The cell is positioned within the microchannel, with the "in" side facing the entrance and the "out" side facing the exit. The dimensions R, w, and h are indicated.
* **Panel b:** The heatmap shows a concentration of negative traction (red) at the center of the outer hemisphere. The traction gradually decreases towards the edges.
* **Panel c:** The heatmap shows a concentration of positive traction (blue) at the center of the inner hemisphere. The traction gradually decreases towards the edges.
* **Panel d:** The heatmap shows a distribution of both positive and negative traction. There are two distinct regions of positive traction (blue) on either side of a central region of negative traction (red).
### Key Observations
* The outer hemisphere exhibits primarily negative traction, concentrated at the center.
* The inner hemisphere exhibits primarily positive traction, concentrated at the center.
* The total traction distribution shows a bipolar pattern with positive traction on the sides and negative traction in the center.
### Interpretation
The image illustrates the traction forces exerted by a cell confined within a microchannel. The outer hemisphere experiences compressive forces (negative traction), while the inner hemisphere experiences tensile forces (positive traction). The total traction distribution suggests that the cell is pulling inward from the sides and pushing outward from the center. This distribution of forces likely reflects the cell's attempt to adhere to the microchannel walls and maintain its position. The difference in colorbar scales between the outer/inner hemispheres and the total traction suggests that the magnitude of traction on the individual hemispheres is larger than the net traction.
</details>
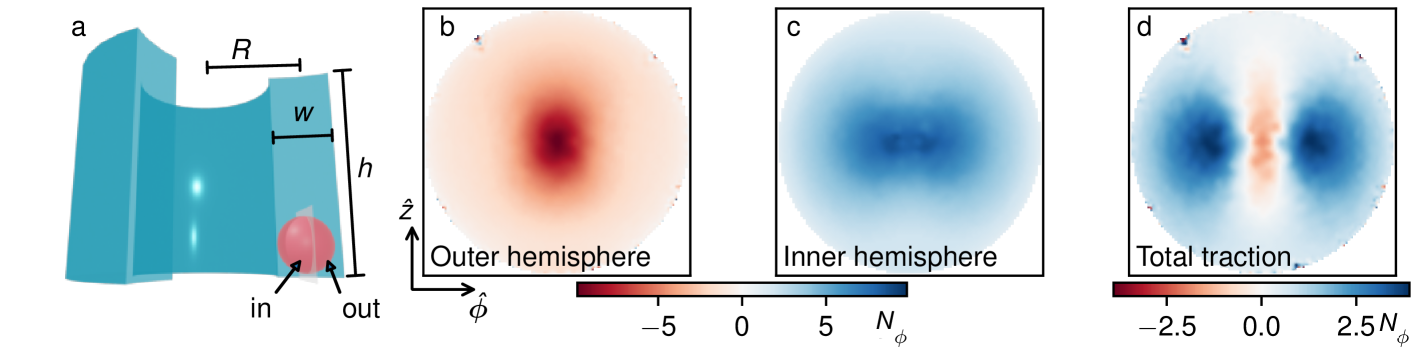
Fig. 3: (a) Schematic showing the simulation domain considered, which consists of the space between two concentric cylinders separated by a spacing $w$ , with height $h$ , and a central radius $R$ . (b,c) Surface traction in the outer (b) and inner (c) hemispheres of the particle, as defined in panel (a). (d) Total traction given by the sum of the functions shown in panels (b) and (c), which is positive, indicating a resulting force that pushes forward the particle.
3 Single particle motion
We start by illustrating the dynamics of individual spinning particles dispersed within circular channels characterized by different radius $R$ . Fig. 1 (a) shows a microscope image of two channels with radii $R=5,15\,\rm{\mu m}$ and filled with one paramagnetic colloidal particle each, while the corresponding schematic of the experimental system is shown in Fig. 1 (b). The spinning is induced by the application of an external magnetic field that performs conical precession at a frequency $\omega$ and an angle $\theta$ around the $\hat{\bm{z}}$ axis:
$$
\bm{H}\equiv H_{0}[\cos{\theta}\hat{\bm{z}}+\sin{\theta}(\cos{(\omega t)}\hat{%
\bm{x}}+\sin{(\omega t)}\hat{\bm{y}})]\,\,\,, \tag{6}
$$
being $H_{0}$ the field amplitude. The precessing field has an in-plane component $\bm{H_{xy}}\equiv\sin{\theta}(\cos{(\omega t)}\hat{\bm{x}}+\sin{(\omega t)}%
\hat{\bm{y}})$ which is used to spin the particles, and a static one perpendicular to the particle plane, $\bm{H}_{z}=H_{0}\cos{\theta}\hat{\bm{z}}$ which is used to control the dipolar interactions when many particles are present. In particular, we keep constant the magnetic field values to $H_{0}=900\,\rm{A\,m^{-1}}$ , the frequency $f=50$ Hz such that $\omega=2\pi f=314.2\,\rm{rad\,s^{-1}}$ and the cone angle at $\theta=44.5^{\circ}$ .
For the single particle case, the precessing field at relative high frequency, is able to induce an average magnetic torque, $\bm{\tau}_{m}=\langle\bm{m}×\bm{H}\rangle$ , which sets the particles in rotational motion at an angular speed $\omega_{p}$ close to the plane. This torque arises due to the finite relaxation time $t_{r}$ of the particle magnetization, as demonstrated in previous works. 39, 40 Note that here, for simplicity, we assume that the particles are characterized by a single relaxation time. For a paramagnetic colloid with radius $a=1.4\,\rm{\mu m}$ and magnetic volume susceptibility $\chi\sim 0.4$ , the torque can be calculated as 41, 42,
$$
\bm{\tau}_{m}=\frac{4a^{3}\pi\mu_{0}\chi H_{0}^{2}\sin^{2}{(\theta)}\omega t_{%
r}}{3(1+t_{r}^{2}\omega^{2})}\hat{\bm{z}} \tag{7}
$$
being $\mu_{0}=4\pi 10^{-7}\,\rm{H\,m}$ the permeability of vacuum, similar to that of water. Assuming $t_{r}\sim 10^{-3}$ s we obtain $\tau_{m}=0.32\,\rm{pN\,\mu m}$ .
In the overdamped limit, the magnetic torque is balanced by the viscous torque $\bm{\tau}_{v}$ arising from the rotation in water, $\bm{\tau}_{m}+\bm{\tau}_{v}=\bm{0}$ . Close to a planar wall, $\bm{\tau}_{v}$ can be written as, $\bm{\tau}_{v}=-8\pi\eta\bm{\omega}_{p}a^{3}f_{r}(a/z_{p})$ , where $\eta=10^{-3}\,\rm{Pa· s}$ is the viscosity of water, and $f_{r}(a/z_{p})$ is a correction term that accounts for the proximity of the bottom wall at a distance $z_{p}$ . 43 In particular, assuming the space between the particle and the wall $\sim 100$ nm, $f_{r}(a/h)=1.45$ . In the overdamped regime, the balance between both torques allows estimating the particle mean angular velocity: $\langle\omega_{p}\rangle=\mu_{0}H_{0}^{2}\sin^{2}{\theta}\chi\tau_{r}\omega/[6%
\eta(1+\tau_{r}^{2}\omega^{2})]$ , which gives $\omega_{p}=3.27\rm{rad\,s^{-1}}$ . Clearly, this estimate does not consider the presence of a top wall and how it reduces the particle angular rotation, as we will see later.
Now let’s consider the general situation of a rotating free particle, far away from any surface. The rotational motion is reciprocal, and unable to induce any drift. However, if close to a solid wall, as shown in the left schematic in Fig. 2 (a), the rotational motion can be rectified into a net drift velocity due to the hydrodynamic interaction with the close substrate, 43 which breaks the spatial symmetry of the flow. The situation changes when the particle is squeezed between two flat channels, as in the middle of Fig. 2 (a). Now the asymmetric flow close to the bottom surface is balanced by the one at the top, and the spatial symmetry is restored. As a consequence, the particle is unable to propel unless small thermal fluctuations can displace the colloid from the central position making it closer to one of the two surfaces. However, even in this case, the rectification will be balanced on average. Here we show that, in contrast to previous cases, when the particle is confined between two curved walls, the effect of curvature breaks again the spatial symmetry, and induce a net particle motion, as shown in the last schematic in Fig. 2 (a).
<details>
<summary>x9.png Details</summary>
### Visual Description
## Composite Figure: Particle Dynamics in Confined Environments
### Overview
The image presents a composite figure analyzing particle dynamics within a confined environment. It consists of three sub-figures: (a) a microscopic image of the confinement structure, (b) two plots showing the mean squared displacement (MSD) of particles as a function of time, color-coded by particle density, and (c) a plot showing the time-averaged MSD as a function of particle density, with an inset showing the time evolution of the MSD for different densities.
### Components/Axes
**Sub-figure a:**
* **Description:** A grayscale microscopic image showing a circular confinement structure with concentric rings. Particles (appearing as small bright dots) are trapped within the rings.
* **Scale Bar:** A white scale bar is visible in the bottom right corner.
**Sub-figure b (Left and Right Plots):**
* **Y-axis:** `<Δs²> [µm²]` - Mean squared displacement, plotted on a logarithmic scale from approximately 10^-2 to 10^4.
* **X-axis:** `δt [s]` - Time interval, plotted on a logarithmic scale from approximately 10^-1 to 10^3.
* **Color Bar (Top):** `ρL` - Particle density, ranging from 0.01 (blue) to 0.30 (red). The color gradient is as follows: 0.01 (dark blue), 0.03 (blue), 0.06 (light blue), 0.12 (cyan), 0.14 (light green), 0.18 (yellow-green), 0.20 (yellow), 0.24 (orange), 0.28 (red-orange), 0.30 (red).
* **Reference Lines:**
* Green dashed-dotted line: Labeled "~t".
* Black dotted line: Labeled "~t²".
* **Data Series:** Each colored line represents the MSD for a specific particle density (ρL), as indicated by the color bar.
**Sub-figure c:**
* **Y-axis:** `<r²>` - Time-averaged mean squared displacement, plotted on a linear scale from 0.0 to 1.0.
* **X-axis:** `ρL` - Particle density, plotted on a linear scale from 0.10 to 0.30.
* **Data Points:**
* Red circles: Represent one data series.
* Blue squares: Represent another data series.
* **Inset Plot:**
* Y-axis: `r^2` - Mean squared displacement, plotted on a linear scale from approximately 0.4 to 1.0.
* X-axis: `t (s)` - Time, plotted on a linear scale from 0 to 1000.
* Data Series: Colored lines representing the time evolution of the MSD for different particle densities (ρL), matching the color scheme in sub-figure b.
### Detailed Analysis
**Sub-figure b (MSD vs. Time):**
* **General Trend:** For all densities, the MSD increases with time. At short times, the MSD follows a t² relationship, indicating ballistic motion. At longer times, the MSD transitions to a t relationship, indicating diffusive motion.
* **Density Dependence:**
* **ρL = 0.01 (Dark Blue):** The MSD initially follows the t² line, then transitions to a slope slightly below the t line at longer times.
* **ρL = 0.03 (Blue):** Similar to ρL = 0.01, but with a slightly higher MSD.
* **ρL = 0.06 (Light Blue):** The MSD is higher than the previous two densities and follows a similar trend.
* **ρL = 0.12 (Cyan):** The MSD continues to increase.
* **ρL = 0.14 (Light Green):** The MSD continues to increase.
* **ρL = 0.18 (Yellow-Green):** The MSD continues to increase.
* **ρL = 0.20 (Yellow):** The MSD continues to increase.
* **ρL = 0.24 (Orange):** The MSD continues to increase.
* **ρL = 0.28 (Red-Orange):** The MSD continues to increase.
* **ρL = 0.30 (Red):** The MSD is the highest among all densities and follows a similar trend.
* **Crossover:** The point at which the MSD transitions from t² to t behavior shifts to shorter times as the density increases.
**Sub-figure c (Time-Averaged MSD vs. Density):**
* **Red Circles:** The time-averaged MSD (represented by red circles) increases with density from ρL = 0.10 to ρL = 0.24, then decreases slightly at ρL = 0.30. Approximate values:
* ρL = 0.10, <r²> ≈ 0.25
* ρL = 0.18, <r²> ≈ 0.75
* ρL = 0.24, <r²> ≈ 0.95
* ρL = 0.30, <r²> ≈ 0.90
* **Blue Squares:** The time-averaged MSD (represented by blue squares) is low at ρL = 0.10 and increases to a maximum at ρL = 0.30. Approximate values:
* ρL = 0.10, <r²> ≈ 0.0
* ρL = 0.18, <r²> ≈ 0.45
* ρL = 0.24, <r²> ≈ 0.70
* ρL = 0.30, <r²> ≈ 0.80
* **Inset Plot:** The inset plot shows that the MSD reaches a plateau at longer times for all densities. The plateau value increases with density, consistent with the trend observed in the main plot.
### Key Observations
* The MSD of particles in the confined environment depends on both time and particle density.
* At short times, the motion is ballistic, while at longer times, it is diffusive.
* The time-averaged MSD exhibits a non-monotonic dependence on density, with a peak at intermediate densities for the red circle data series.
* The inset plot confirms that the MSD reaches a steady-state value at long times.
### Interpretation
The data suggests that particle dynamics in the confined environment are influenced by crowding effects. At low densities, particles can move freely, resulting in a higher MSD. As the density increases, crowding becomes more significant, hindering particle movement and reducing the MSD. However, at very high densities, the particles may become trapped in local minima, leading to a slight increase in the MSD. The two data series in sub-figure c likely represent different types of particles or different methods of calculating the MSD, leading to the observed differences in their density dependence. The confinement structure and particle interactions play a crucial role in determining the overall dynamics.
</details>
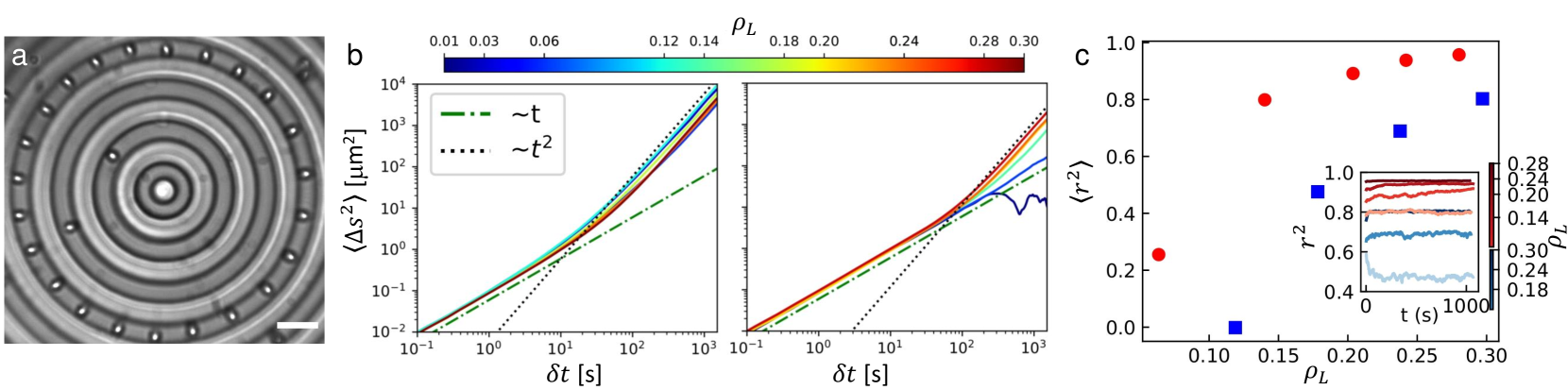
Fig. 4: (a) Optical microscope image of paramagnetic colloidal particles spinning inside a circular channel with radius $R=35\,\rm{\mu m}$ . The scale bar is 10 $\mu m$ , see also Movie S2†in the Supporting Information. (b) Mean squared displacement of the circumference arc $\langle\Delta s^{2}\rangle$ as a function of the time intervals $\delta t$ for different densities $\rho_{L}$ . Left (right) plot shows the experimental data for a channel with radius $R=15\mu m$ ( $R=35\mu m$ respectively). The dashed-dotted line indicate the normal diffusion ( $\alpha=1$ ) while the dotted line shows the ballistic regime ( $\alpha=2$ ). Colorbar, legend, and axes are common in both plots. (c) Average Kuramoto order parameter $\langle r^{2}\rangle$ (Eq. (10)) versus particle density $\rho_{L}$ . Blue squares (red disks) are experimental data for a channel with radius $R=15\,\rm{\mu m}$ ( $R=35\,\rm{\mu m}$ respectively). Inset shows the temporal evolution of $\langle r^{2}\rangle$ for different particle densities, identified by the color bar. The color code of the color bar is the same as in the main plot.
To demonstrate this point, we perform a series of experiments by varying the channel radius $R∈[5,40]\,\rm{\mu m}$ and measuring the tangential velocity of the particle $v_{\phi}$ , Fig. 2 (b). We find that while for large rings ( $R>20\,\rm{\mu m}$ ) the particle does not display any net movement, $v_{\phi}\sim 0$ , below $R\sim 10\rm{\mu m}$ the effect of curvature becomes important and it can rectify the rotational motion of the particle. Indeed, for $R=5\rm{\mu m}$ the particle circulates along the channel at a non-negligible speed of $v_{\phi}\simeq 0.14\rm{\mu m\,s^{-1}}$ . The rectification process decreases by increasing $R$ , while the sense of rotation is equal to that of the precessing field, sign that the spinning particle is more strongly coupled to the bottom wall of the curved channel.
This can be also appreciated from the Video S1†in the Supporting Information, where a driven particle in the small, $R=5\,\rm{\mu m}$ ring moves clockwise, even if the velocity is not uniform. Regarding this last point, we note that due to the resolution limit of the lithographic technique, our small channels may present imperfections such as deformations and non-uniform edges. These defects may pin a rotating particle during its motion for a longer time. This effect can be observed in the inset to Fig. 2, where we have discretized space and calculated the mean tangential velocity $v_{\phi}$ for each slice of the circular trajectory. Here the time spent by the particle near $\phi=0$ is larger, and at this point, the colloidal particle is trapped by a defect, taking a long time to be released by thermal motion. To avoid this problem, we have calculated the mean velocity directly from the binned series shown in the inset, giving equal weights to all the discrete slices.
We can use the equation
$$
\displaystyle v_{\phi}=M_{v_{\phi},\tau_{z}}\tau_{z} \tag{8}
$$
to calculate the tangential velocity, where the entry of the mobility matrix, $M_{v_{\phi},\tau_{z}}$ , is calculated from finite element simulations. To match the experimental value we fit the value of $\tau_{z}$ , which is constant for all values of the curvature $R$ . We have performed a non-linear regression of the experimental data and fit the velocity profile using the torque as a single, free parameter. The calculated off-axis component of the mobility matrix $\bm{M}$ is multiplied by a constant factor, which gives the continuous line shown in Fig. 2 (b). The data shows excellent agreement with the simulation for a torque of $\tau$ = 0.55 pN $\mu$ m, which is slightly lower than the calculated value of the magnetic torque, $\tau_{m}=0.73\,\rm{pN\,\mu m}$ . We also performed simulations with the sphere center placed away from the channel centerline and closer to the inner or the outer wall. However, these simulations did not agree well with the experimental data. The small difference can be attributed to the different approximations used to calculate $\tau_{m}$ , such as the presence of a single relaxation time or the value of the magnetic volume susceptibility of the particle which is a factor that can change from one batch to the other since it depends on the chemical synthesis used to produce these particles.
To understand the origin of the propulsion, we have used the simulation to calculate the surface traction along a sphere rotating at a constant angular velocity. The traction is computed in each point on the particle surface from the stress tensor as $\bm{T}·\bm{n}$ , where $\bm{n}$ is the unit vector normal to the surface of the sphere. In Fig. 3 we are showing only the $\hat{\bm{\phi}}-$ component of the traction vector, which points in the direction of the particle’s translational motion. In Figs. 3 (b) and (c), where we show the normalized traction force $N_{\phi}$ calculated in the outer and inner hemispheres of the particle respectively, we find that the coupling of the particle surface to the outer wall pushes the particle back towards the negative $\hat{\bm{\phi}}$ -direction, corresponding to a negative angular velocity. In contrast, the interaction between the inner hemisphere of the particle, and the inner wall pushes the particle along the forward direction. The last panel, Fig. 3 (d) shows the sum of both interactions, whose integral yields the total hydrodynamic force acting along the $\hat{\bm{\phi}}$ direction. Even though there is a negative component in the center of the circle, which indicates a higher coupling to the outer wall, it is clear that the strongest contribution comes from the two positive lobes where the inner hemisphere coupling is stronger, and the total force along the $\hat{\bm{\phi}}$ axis is positive. Thus, our finite element simulations confirm that the rectification process of a single rotating particle within a curved channel results only from the hydrodynamic interactions between the particle and the surfaces.
4 Driven magnetic single file
We next explore the collective dynamics of an ensemble of interacting spinning colloids that are confined along the circular channel. Since the lateral width is $w\sim 2a$ the colloidal particles cannot pass each other, thus effectively forming a "single file" system. 44, 45. While the particle dynamics in a "passive" single file, driven only by thermal fluctuations, have been a matter of much interest in the past, 46, 47, 48 more scarce are realizations of "driven" single files 49, 50, where the particles undergo ballistic transport due to external force and collective interactions. 51, 52, 53, 54 In our case, a typical situation is shown in Fig. 4 (a), where $N=23$ particles move within a channel of radius $R=35\rm{\mu m}$ (linear density $\rho_{L}=Na/(2\pi R)=0.15$ ), see also Video S2†in the Supporting Information. The applied precessing magnetic field apart from inducing the spinning motion within the particle is also used to reduce the magnetic dipolar interaction between them. In particular, in the point dipole approximation, we can consider that the interaction potential $U_{dd}$ between two equal moments $\bm{m}_{i,j}$ at relative position $r=|\bm{r}_{i}-\bm{r}_{j}|$ is given by: $U_{dd}=\mu_{0}/4\pi\{(\bm{m}_{i}·\bm{m}_{j}/r^{3})-[3(\bm{m}_{i}·\bm{r%
})(\bm{m}_{j}·\bm{r})/r^{5}]\}$ . Here the induced moment is given by, $m=V\chi H_{0}$ , being $V=(4\pi a^{3})/3$ the particle volume. If we assume that the induced moments follow the precessing field with a cone angle $\theta$ , these interactions can be time-averaged, and become:
$$
\langle U_{dd}\rangle=\frac{\mu_{0}m^{2}}{4\pi r^{3}}P_{2}(\cos{\theta})\,\,\,, \tag{9}
$$
where $P_{2}(\cos{\theta})=(3\cos^{2}{\theta}-1)/2$ is the second order Legendre polynomial. For the field parameters used, the dipolar interaction is small since $\theta=44.5^{\circ}$ which is close to the "magic angle" ( $\theta=45.7^{\circ}$ ) where $P_{2}(\cos{\theta})\sim 0$ . From these values, we estimate that the pair repulsion is of the order of $U_{dd}=5k_{B}T$ being $T=293\,\rm{K}$ the thermodynamic temperature and $k_{B}$ the Boltzmann constant. Thus, the magnetic interactions are slightly repulsive to avoid the particles attracting each other at high density. Indeed, for a purely rotating magnetic field ( $H_{z}=0$ , $\theta=90^{\circ}$ ) the spinning particles aggregate forming compact chains that induce clogging of the channel. In contrast, to obtain a strong repulsion we would require a smaller in-plane field component that would induce a smaller magnetic torque.
Thus, we perform different experiments by varying both the particle linear density within the ring, $\rho_{L}$ , and the channel radius $R$ , while keeping fixed the applied field parameters, which are the same as in the single-particle case. From the particle positions, we measure the mean squared displacement (MSD) along the circumference arc $\Delta s$ connecting a pair of particles within the ring. Here the MSD is calculated as $\langle\Delta s^{2}(\Delta t)\rangle\equiv\langle(s(t)-s(t+\delta t))^{2}\rangle$ , being $\delta t$ the lag time and $\langle…\rangle$ a time average. We use the MSD to distinguish the dynamic regimes at the steady state. Here the MSD behaves as a power law $\langle\Delta s^{2}(\Delta t)\rangle\sim\tau^{\alpha}$ , with an exponent $\alpha=1$ for standard diffusion and $\alpha=2$ for ballistic transport, i.e. a single file of particles with constant speed. As shown in the left plot of Fig. 4 (b) for a small channel width, $R=15\,\rm{\mu m}$ , all MSDs behave similarly, showing an initial diffusive regime followed by a ballistic one at a longer time, and the transition between both dynamic regimes occurs at $\sim 10-20$ s. Increasing the particle density has a small effect in the ballistic regime, where the velocity is higher at a lower density. This effect indicates that the inter-particle interactions reduce the average speed of the single file. Since magnetic dipolar interactions are minimized by spinning the field at the "magic angle", this effect may arise from hydrodynamics. Indeed it was recently observed that these interactions may affect the circular motion of driven systems. 55, 56 In contrast, the situation changes for a larger channel, $R=35\,\rm{\mu m}$ and right plot in Fig. 4 (b). There, at low density $\rho_{L}$ the particle tangential speed vanishes, $v_{\phi}=0$ (as shown in Fig. 2 (b)), and thus we recover a diffusive regime also at long time until the slope fluctuates due to lack of statistical averages. Increasing $\rho_{L}$ we recover the transition from the diffusive to the ballistic one, but occurring at a relatively longer time, $\sim 100$ s. The emergence of a ballistic regime results from the cooperative movement of the particles which generate hydrodynamic flow fields near the surface. Indeed, while single particles display negligible translational velocity in channel of radii $R=15\rm{\mu m}$ and $35\rm{\mu m}$ (Fig. 2(a)), we observed a ballistic regime in both cases at high density. As previously observed for a linear, one-dimensional chain of rotors 42, the spinning particles generate a cooperative flow close to a bounding wall which act as a “conveyor belt effect”. Here, the situation is similar, however the larger distance between the particles due to their repulsive interactions and the presence of two walls which screen the flow reduce the average speed of the single file and increase the time required for this cooperative effect to set in.
We can estimate the transition time between both regimes for the single particle. We start by measuring the diffusion coefficient of the single particle within the channel from the MSD in the diffusive regime, $D=0.0379± 0.0002\rm{\mu m^{2}\,s^{-1}}$ . Thus, the motion of an individual magnetic particle will turn from the Brownian motion with $\langle\Delta s^{2}\rangle=2Dt$ to a ballistic one with $\langle\Delta s^{2}\rangle=(R\omega_{p}t)^{2}$ after a characteristic time $\tau_{c}=D/(R\omega_{p})^{2}$ . From the experimental data in Fig. 2 (b) we have that $\omega_{p}=0.0073\,\rm{rad\,s^{-1}}$ for $R=15\,\rm{\mu m}$ which gives $\tau_{c}=3.1$ s, similar to the small channel in the left of Fig. 4 (b).
We further analyze the relative particle displacement, and the presence of synchronized movement by measuring a Kuramoto-like 57, 58 order parameter, defined as:
$$
\langle r^{2}(t)\rangle=\frac{1}{N^{2}}\sum_{i,j=1}^{N}\cos{(\Delta\varphi_{ij%
}(t))} \tag{10}
$$
where $N$ is the number of particles, $\Delta\varphi_{ij}=\varphi_{i}-\varphi_{j}$ the difference between the angular position of two nearest particles $i,j$ and $\varphi_{i,j}$ is measured with respect to one axis ( $\hat{\bm{x}}$ ) located in the particle plane. This order parameter is normalized such that $\langle r^{2}\rangle∈[0,1]$ , where $1$ corresponds to the fully coordinated relative movement of all spinning particles. Fig. 4 (c) show the average value of $r^{2}$ at different density $\rho_{L}$ . In particular, we find that $r^{2}$ increases with $\rho_{L}$ since, for a large number of particles the repulsive particles start to interact with each other and their translation becomes more coordinated. On the other hand, we find that $\langle r^{2}\rangle$ decreases with the radius of curvature (data from red from blue) meaning that the curvature reduces the cooperative translation between the spinning particles. The cooperative movement revealed from the Kuramoto order parameter results from the repulsive magnetic dipolar interactions. Indeed, this parameter increases with density i.e. when the particles are closer to each other and experience stronger repulsive forces. However, the emergence of self-propulsion in our system is a pure hydrodynamic effect induced by the wall curvature. Indeed, the precessing field induces reciprocal magnetic dipolar interactions which could not give rise to any net motion of the spinning particles.
Conclusions
We have demonstrated that a circular channel can be used to induce and enhance the propulsion of spinning particles while the effect becomes absent for a flat one. The propulsion appears from the different hydrodynamic coupling to each of the two curved walls; even if the no-slip condition of each wall pushes the particle along an opposite direction, the two interactions are not symmetric due to the channel curvature. The dominating interaction is the one from the inner wall, which produces a rotation along the channel along the same direction as the angular velocity. We confirm this hypothesis both via experiments and finite element simulations.
We note here that the realization of field-driven magnetic prototypes able to propel in viscous fluids is important for both fundamental and technological reasons. In the first case, the collection of self-propelled can be used as a model system to investigate fundamental aspects of non-equilibrium statistical physics. 59, 60, 61, 62, 63 On the other hand, it is expected that these prototypes can be used as controllable inclusions in microfluidic systems, 64, 65, 66, 67, 68 either to control or regulate the flow 69, 70, 71 or to transport microscopic biological or chemical cargoes. 38, 72, 73, 74, 75, 76, 77 The propulsion mechanism unveiled in this work could be used to move particles along a microfluidic device, either by designing it with a circular path, or by coupling many semicircles in a zig-zag to form a straight path.
Data availability
The data that support the findings of this study are available from the corresponding authors upon reasonable request.
Conflicts of interest
There are no conflicts to declare.
Acknowledgements
We thank Carolina Rodriguez-Gallo who shared the protocol for the sample preparation, and the MicroFabSpace and Microscopy Characterization Facility, Unit 7 of ICTS “NANBIOSIS” from CIBER-BBN at IBEC. This project has received funding from the European Research Council (ERC) under the European Union’s Horizon 2020 research and innovation program (grant agreement no. 811234). M.D.C. acknowledges funding from the Ramon y Cajal fellowship RYC2021-030948-I and the grant PID2022-139803NB-I00 funded by the MICIU/AEI/10.13039/501100011033 and by the EU under the NextGeneration EU/PRTR & FEDER programs. I. P. acknowledges support from MICINN and DURSI for financial support under Projects No. PID2021-126570NB-100 AEI/FEDER-EU and No. 2021SGR-673, respectively, and from Generalitat de Catalunya (ICREA Académia). P. T. acknowledges support from the Ministerio de Ciencia, Innovación y Universidades (grant no. PID2022- 137713NB-C21 AEI/FEDER-EU) and the Agència de Gestió d’Ajuts Universitaris i de Recerca (project 2021 SGR 00450) and the Generalitat de Catalunya (ICREA Académia).
Notes and references
- Happel and Brenner 2012 J. Happel and H. Brenner, Low Reynolds number hydrodynamics: with special applications to particulate media, Springer Science & Business Media, 2012, vol. 1.
- Purcell 1977 E. M. Purcell, American Journal of Physics, 1977, 45, 3–11.
- Dreyfus et al. 2005 R. Dreyfus, J. Baudry, M. L. Roper, M. Fermigier, H. A. Stone and J. Bibette, Nature, 2005, 437, 862–5.
- Gao et al. 2010 W. Gao, S. Sattayasamitsathit, K. M. Manesh, D. Weihs and J. Wang, J. Am. Chem. Soc., 2010, 132, 14403–5.
- Cebers and Erglis 2016 A. Cebers and K. Erglis, Adv. Funct. Mater., 2016, 26, 3783–3795.
- Yang et al. 2020 T. Yang, B. Sprinkle, Y. Guo and N. Wu, Proc. Nat. Acad. Sci. USA, 2020, 117, 18186–18193.
- Qiu et al. 2014 T. Qiu, T.-C. Lee, A. G. Mark, K. I. Morozov, R. Münster, O. Mierka, S. Turek, A. M. Leshansky and P. Fischeru, Nature Comm., 2014, 5, 5119.
- Li et al. 2021 G. Li, E. Lauga and A. M. Ardekani, Journal of Non-Newtonian Fluid Mechanics, 2021, 297, 104655.
- Snezhko and Aranson 2016 A. Snezhko and I. S. Aranson, Nat. Materials, 2016, 10, 698–703.
- García-Torres et al. 2018 J. García-Torres, C. Calero, F. Sagués, I. Pagonabarraga and P. Tierno, Nature Comm., 2018, 9, 1663.
- Steinbach et al. 2020 G. Steinbach, M. Schreiber, D. Nissen, M. Albrecht, S. Gemming and A. Erbe, Phys. Rev. Res., 2020, 2, 023092.
- Bechinger et al. 2016 C. Bechinger, R. Di Leonardo, H. Löwen, C. Reichhardt, G. Volpe and G. Volpe, Rev. Mod. Phys., 2016, 88, 045006.
- Frymier et al. 1995 P. D. Frymier, R. M. Ford, H. C. Berg and P. T. Cummings, Proc. Natl. Acad. Sci. U.S.A., 1995, 92, 6195–6199.
- Berke et al. 2008 A. P. Berke, L. Turner, H. C. Berg and E. Lauga, Phys. Rev. Lett., 2008, 101, 038102.
- Lauga et al. 2006 E. Lauga, W. R. DiLuzio, G. M. Whitesides and H. A. Stone, Biophysical Journal, 2006, 90, 400–412.
- Di Leonardo et al. 2011 R. Di Leonardo, D. Dell’Arciprete, L. Angelani and V. Iebba, Phys. Rev. Lett., 2011, 106, 038101.
- Spagnolie et al. 2015 S. E. Spagnolie, G. R. Moreno-Flores, D. Bartolo and E. Lauga, Soft Matter, 2015, 11, 3396–3411.
- Raveshi et al. 2021 M. R. Raveshi, M. S. Abdul Halim, S. N. Agnihotri, M. K. O’Bryan, A. Neild and R. Nosrati, Nat Commun, 2021, 12, 3446.
- Bianchi et al. 2020 S. Bianchi, V. Carmona Sosa, G. Vizsnyiczai and R. Di Leonardo, Sci Rep, 2020, 10, 4609.
- Kuron et al. 2019 M. Kuron, P. Stärk, C. Holm and J. de Graaf, Soft Matter, 2019, 15, 5908–5920.
- Volpe et al. 2011 G. Volpe, I. Buttinoni, D. Vogt, H.-J. Kümmerer and C. Bechinger, Soft Matter, 2011, 7, 8810.
- Spagnolie and Lauga 2012 S. E. Spagnolie and E. Lauga, J. Fluid Mech., 2012, 700, 105–147.
- Galajda et al. 2007 P. Galajda, J. Keymer, P. Chaikin and R. Austin, Journal of Bacteriology, 2007, 189, 8704–8707.
- Wan et al. 2008 M. B. Wan, C. J. Olson Reichhardt, Z. Nussinov and C. Reichhardt, Phys. Rev. Lett., 2008, 101, 018102.
- Ai and Wu 2014 B.-Q. Ai and J.-C. Wu, The Journal of Chemical Physics, 2014, 140, 094103.
- Yariv and Schnitzer 2014 E. Yariv and O. Schnitzer, Phys. Rev. E, 2014, 90, 032115.
- Koumakis et al. 2014 N. Koumakis, C. Maggi and R. Di Leonardo, Soft Matter, 2014, 10, 5695–5701.
- Pototsky et al. 2013 A. Pototsky, A. M. Hahn and H. Stark, Phys. Rev. E, 2013, 87, 042124.
- Ai et al. 2013 B.-q. Ai, Q.-y. Chen, Y.-f. He, F.-g. Li and W.-r. Zhong, Phys. Rev. E, 2013, 88, 062129.
- Guidobaldi et al. 2014 A. Guidobaldi, Y. Jeyaram, I. Berdakin, V. V. Moshchalkov, C. A. Condat, V. I. Marconi, L. Giojalas and A. V. Silhanek, Phys. Rev. E, 2014, 89, 032720.
- Kantsler et al. 2013 V. Kantsler, J. Dunkel, M. Polin and R. E. Goldstein, Proc. Natl. Acad. Sci. U.S.A., 2013, 110, 1187–1192.
- Tierno et al. 2008 P. Tierno, R. Golestanian, I. Pagonabarraga and F. Sagués, Phys. Rev. Lett., 2008, 101, 218304.
- Driscoll et al. 2017 M. Driscoll, B. Delmotte, M. Youssef, S. Sacanna, A. Donev and P. Chaikin, Nat. Physi., 2017, 13, 375–379.
- Martinez-Pedrero et al. 2018 F. Martinez-Pedrero, E. Navarro-Argemí, A. Ortiz-Ambriz, I. Pagonabarraga and P. Tierno, Sci. Adv., 2018, 4, eaap9379.
- Tierno and Snezhko 2021 P. Tierno and A. Snezhko, ChemNanoMat, 2021, 7, 881–893.
- Morimoto et al. 2008 H. Morimoto, T. Ukai, Y. Nagaoka, N. Grobert and T. Maekawa, Phys. Rev. E, 2008, 78, 021403.
- Sing et al. 2010 C. E. Sing, L. Schmid, M. F. Schneider, T. Franke and A. Alexander-Katz, Proc. Natl. Acad. Sci. U.S.A., 2010, 107, 535.
- Zhang et al. 2010 L. Zhang, T. Petit, Y. Lu, B. E. Kratochvil, K. E. Peyer, R. Pei, J. Lou and B. J. Nelson, ACS Nano, 2010, 10, 6228–6234.
- Tierno et al. 2007 P. Tierno, R. Muruganathan and T. M. Fischer, Phys. Rev. Lett., 2007, 98, 028301.
- Janssen et al. 2009 X. J. A. Janssen, A. J. Schellekens, K. van Ommering, L. J. van Ijzendoorn and M. J. Prins, Biosens. Bioelectron., 2009, 24, 1937.
- Cebers and Kalis 2011 A. Cebers and H. Kalis, Europ. Phys. J. E, 2011, 34, 1292.
- Martinez-Pedrero et al. 2015 F. Martinez-Pedrero, A. Ortiz-Ambriz, I. Pagonabarraga and P. Tierno, Phys. Rev. Lett., 2015, 115, 138301.
- Goldman et al. 1967 A. J. Goldman, R. G. Cox and H. Brenner, Chem. Eng. Sci., 1967, 22, 637.
- Kärger and Ruthven 1992 Diffusion in zeolites and other microporous solids, ed. J. Kärger and D. Ruthven, Wiley, New York, 1992.
- Kärger 1992 J. Kärger, Phys. Rev. A, 1992, 45, 4173–4174.
- Wei et al. 2000 Q.-H. Wei, C. Bechinger and P. Leiderer, Science, 2000, 287, 625–627.
- Lutz et al. 2004 C. Lutz, M. Kollmann and C. Bechinger, Phys. Rev. Lett., 2004, 93, 026001.
- Lin et al. 2005 B. Lin, M. Meron, B. Cui, S. A. Rice and H. Diamant, Phys. Rev. Lett., 2005, 94, 216001.
- Köppl et al. 2006 M. Köppl, P. Henseler, A. Erbe, P. Nielaba and P. Leiderer, Phys. Rev. Lett., 2006, 97, 208302.
- Misiunas and Keyser 2019 K. Misiunas and U. F. Keyser, Phys. Rev. Lett., 2019, 122, 214501.
- Taloni and Marchesoni 2006 A. Taloni and F. Marchesoni, Phys. Rev. Lett., 2006, 96, 020601.
- Barkai and Silbey 2009 E. Barkai and R. Silbey, Phys. Rev. Lett., 2009, 102, 050602.
- Illien et al. 2013 P. Illien, O. Bénichou, C. Mejía-Monasterio, G. Oshanin and R. Voituriez, Phys. Rev. Lett., 2013, 111, 038102.
- Dolai et al. 2020 P. Dolai, A. Das, A. Kundu, C. Dasgupta, A. Dhar and K. V. Kumar, Soft Matter, 2020, 16, 7077.
- Cereceda-López et al. 2021 E. Cereceda-López, D. Lips, A. Ortiz-Ambriz, A. Ryabov, P. Maass and P. Tierno, Phys. Rev. Lett., 2021, 127, 214501.
- Lips et al. 2022 D. Lips, E. Cereceda-López, A. Ortiz-Ambriz, P. Tierno, A. Ryabov and P. Maass, Soft Matter, 2022, 96, 8983–8994.
- Kuramoto and Nishikawa 1987 Y. Kuramoto and I. Nishikawa, Journal of Statistical Physics, 1987, 49, 569–605.
- Strogatz 2000 S. H. Strogatz, Physica D: Nonlinear Phenomena, 2000, 143, 1–20.
- Ramaswamy 2010 S. Ramaswamy, Annu. Rev. Condens. Matter Phys., 2010, 1, 323–345.
- Marchetti et al. 2013 M. C. Marchetti, J. F. Joanny, S. Ramaswamy, T. B. Liverpool, J. Prost, M. Rao and R. A. Simha, Rev. Mod. Phys., 2013, 85, 1143–1189.
- Fodor et al. 2016 E. Fodor, C. Nardini, M. E. Cates, J. Tailleur, P. Visco and F. van Wijland, Phys. Rev. Lett., 2016, 117, 038103.
- Nardini et al. 2017 C. Nardini, E. Fodor, E. Tjhung, F. van Wijland, J. Tailleur and M. E. Cates, Phys. Rev. X, 2017, 7, 021007.
- Palacios et al. 2021 L. S. Palacios, S. Tchoumakov, M. Guix, I. Pagonabarraga, S. Sánchez and A. G. Grushin, Nat Commun, 2021, 12, 4691.
- Tierno et al. 2008 P. Tierno, R. Golestanian, I. Pagonabarraga and F. Sagués, J. Phys. Chem. B, 2008, 112, 16525.
- Burdick et al. 2008 J. Burdick, R. Laocharoensuk, P. M. Wheat, J. D. Posner and J. Wang, J. Am. Chem. Soc., 2008, 26, 8164–8165.
- Sundararajan et al. 2008 S. Sundararajan, P. E. Lammert, A. W. Zudans, V. H. Crespi and A. Sen, Nano Lett., 2008, 8, 1271–1276.
- Sanchez et al. 2011 S. Sanchez, A. Solovev, S. Harazim and O. Schmidt, J. Am. Chem. Soc., 2011, 701, 133.
- Sharan et al. 2021 P. Sharan, A. Nsamela, S. C. Lesher-Pérez and J. Simmchen, Small, 2021, 26, e2007403.
- Terray et al. 2002 A. Terray, J. Oakey and D. W. M. Marr, Science, 2002, 296, 1841.
- Sawetzki et al. 2008 T. Sawetzki, S. Rahmouni, C. Bechinger and D. W. M. Marr, Proc. Natl. Acad. Sci. U. S. A., 2008, 105, 20141.
- Kavcic et al. 2009 B. Kavcic, D. Babic, N. Osterman, B. Podobnik and I. Poberaj, Appl. Phys. Lett., 2009, 95, 023504.
- Palacci et al. 2013 J. Palacci, S. Sacanna, A. Vatchinsky, P. Chaikin and D. Pine, J. Am. Chem. Soc., 2013, 135, 15978.
- Gao and Wang 2014 W. Gao and J. Wang, Nanoscale, 2014, 6, 10486–10494.
- Martinez-Pedrero and Tierno 2015 F. Martinez-Pedrero and P. Tierno, Phys. Rev. Appl., 2015, 3, 051003.
- Fernando Martinez-Pedrero 2017 P. T. Fernando Martinez-Pedrero, Helena Massana-Cid, Small, 2017, 13, 1603449.
- Junot et al. 2023 G. Junot, C. Calero, J. García-Torres, I. Pagonabarraga and P. Tierno, Nano Lett., 2023, 23, 850–857.
- Wang et al. 2023 X. Wang, B. Sprinkle, H. K. Bisoyi and Q. Li, Proc. Nat. Acad. Sci. USA, 2023, 120, e2304685120.