# Multi-Agent Systems Powered by Large Language Models: Applications in Swarm Intelligence
**Authors**:
- Cristian Jimenez-Romero
- Cergy, France
- Alper Yegenoglu
- Christian Blum (Artificial Intelligence Research Institute (IIIA-CSIC))
- Campus of the UAB
- Bellaterra, Spain
## Abstract
This work examines the integration of large language models (LLMs) into multi-agent simulations by replacing the hard-coded programs of agents with LLM-driven prompts. The proposed approach is showcased in the context of two examples of complex systems from the field of swarm intelligence: ant colony foraging and bird flocking. Central to this study is a toolchain that integrates LLMs with the NetLogo simulation platform, leveraging its Python extension to enable communication with GPT-4o via the OpenAI API. This toolchain facilitates prompt-driven behavior generation, allowing agents to respond adaptively to environmental data. For both example applications mentioned above, we employ both structured, rule-based prompts and autonomous, knowledge-driven prompts. Our work demonstrates how this toolchain enables LLMs to study self-organizing processes and induce emergent behaviors within multi-agent environments, paving the way for new approaches to exploring intelligent systems and modeling swarm intelligence inspired by natural phenomena. We provide the code, including simulation files and data at https://github.com/crjimene/swarm_gpt.
Keywords Agent-based modeling $\cdot$ simulation $\cdot$ LLM-guided agents
## 1 Introduction
### 1.1 From Rule-Based to LLM-Driven Agents: A New Paradigm in ABMS
In this study, we use the terms “agent” and “multi-agent” based on their foundational meanings in agent-based modeling and simulation (ABMS) [Macal and North, 2009], while extending them through the integration of large language models (LLMs) [Chang et al., 2024]. Traditionally, an agent in ABMS is an autonomous entity with localized decision-making abilities, interacting with its environment and other agents according to predefined rules or principles. A multi-agent system (MAS) [Wooldridge, 2009] refers to a collection of such agents operating within a shared environment, where global behaviors emerge from their local interactions. Examples of ABMS include simulations of ecosystem dynamics, urban development, and social interactions [Heckbert et al., 2010; Chen, 2012; Bianchi and Squazzoni, 2015].
Beyond rule-based agents, ABMS literature also explores agents controlled by neural networks, especially in applications that require adaptability or learning. Techniques like reinforcement learning and evolutionary strategies are commonly used to optimize agent behaviors in dynamic environments [Hecker and Moses, 2015; Ning and Xie, 2024; Liu et al., 2024a]. Other research investigates the application of biologically inspired architectures, particularly spiking neural networks, to develop solutions that are both energy-efficient and computationally effective Fang and Dickerson [2017]; Putra et al. [2024]. Within these systems, emergent behavior plays a pivotal role, facilitating the effective handling of complex tasks [Jimenez Romero et al., 2024].
Recently, these terms have been introduced in a different context within artificial intelligence. Here, AI agents often represent task-oriented entities designed to autonomously achieve specific goals, such as generating dialogues or managing workflows. These agents typically focus on individual task execution rather than the emergent dynamics central to ABMS ( [Talebirad and Nadiri, 2023; Kannan et al., 2024; Li et al., 2024]).
In our work, we employ the terms “agent” and “multi-agent” in the context of ABMS while integrating LLMs to guide agent behaviors. An agent in our simulations can be either LLM-steered or rule-based. We incorporate LLMs to guide agent behaviors in two ways: (1) simulations consisting entirely of LLM-steered agents, and (2) hybrid simulations where LLM-steered agents interact with traditional rule-based agents. This means our simulations can have populations of agents that are completely LLM-based or a mix of LLM-based and rule-based agents within the same environment.
We aim to explore the potential advantages of leveraging the decision-making and pattern-generation capabilities of LLMs to augment ABMS. Specifically, we are interested in investigating whether integrating LLMs can help us model emergent behavior using the language processing capabilities and the knowledge base of LLMs.
From this point forward, when we refer to “agents,” we mean agents within the ABMS framework that may incorporate LLM intelligence.
### 1.2 Motivation
The field of agent-based simulations has rapidly evolved, driven by advances in artificial intelligence (AI) and computational power. These simulations, which model the interactions of autonomous agents within a defined environment, are increasingly being enhanced by the integration of generative AI, particularly LLMs. In this context, LLMs—with their capacity to process and generate human-like text—offer a novel means of guiding and influencing agent behaviors in real-time. A critical aspect of this integration is prompt engineering, which is the careful design of prompts that serve as instructions for the agents, dictating how they should respond to their environment.
The motivation and contribution of this work are found in the presentation of a toolchain that integrates LLMs with agent-based simulations within the NetLogo environment [Tisue and Wilensky, 2004; Amblard et al., 2015], a platform widely recognized in the complexity science community for its robustness and versatility. NetLogo’s value as an educational tool spanning various academic levels further underscores its importance, making it an ideal choice for demonstrating the integration of advanced AI methods into multi-agent simulations.
Our study investigates two distinct approaches to utilizing LLMs within multi-agent environments, focusing on the role of prompt engineering in shaping agent behavior. The first approach employs detailed, structured prompts within an ant colony simulation. These prompts are designed to specify behaviors under clearly defined conditions, such as following pheromone trails or retrieving food. This method allows for precise control over agent actions, enabling a rule-based system where each agent’s behavior is explicitly dictated by the LLM-generated instructions.
In contrast, The second approach explores the use of less structured, principle-based prompts in a bird flocking simulation. Here, the prompts rely on the LLM’s inherent understanding of complex concepts such as flocking dynamics and self-organization. Instead of requiring explicit, rule-based instructions, these prompts allow the LLM to handle the intricate behavioral patterns that would otherwise need numerous rules to define. This approach leverages the LLM’s capacity to intuitively model these dynamics, enabling behaviors that emerge naturally from agents’ interactions with each other and their environment. As we will show, the LLM can produce adequate and adaptive agent behaviors that realistically reflect complex, emergent patterns within the simulation.
### 1.3 Research Objectives
The following are the main objectives of our research:
- To assess the efficacy of structured prompts in the context of the rule-based ant colony foraging simulation of NetLogo, which is a classic MAS model that demonstrates swarm intelligence principles based on how real ants find food and communicate via pheromones. It is widely used in artificial intelligence, complexity science, and optimization research.
- To assess the efficacy of structured prompts in NetLogo’s knowledge-driven bird flocking simulation, which is also a classic model demonstrating self-organizing behavior in MAS. It is inspired by Craig Reynolds’ “Boids” model [Reynolds, 1987], which simulates how birds, fish, or other animals move in cohesive groups without a central leader.
- To present a comprehensive toolchain that combines LLMs with multi-agent simulation environments, offering a new method for modeling and analyzing swarm behavior in complex systems.
This investigation aims to explore how LLMs, through effective prompt engineering, can be integrated into multi-agent systems to model and guide emergent, self-organizing behaviors in simulated environments.
### 1.4 Background and Related Work
The integration of generative AI into multi-agent systems represents a burgeoning field that seeks to enhance the autonomy, adaptability, and realism of agent behaviors in simulations. This approach leverages the vast knowledge embedded within LLMs to influence agent interactions in ways that were previously unfeasible with traditional rule-based systems. The use of generative AI in multi-agent simulations has opened new avenues for exploring complex behaviors, emergent dynamics, and adaptive systems.
In particular, the integration of LLMs with agent-based simulations represents a significant convergence of natural language processing (NLP) and complex systems modeling. LLMs, with their ability to generate human-like text and understand complex linguistic patterns, have transformed various fields within artificial intelligence, particularly in automating and interpreting language-based tasks. On the other hand, agent-based simulations are a robust framework for modeling complex systems where individual agents interact with each other and their environment, potentially leading to emergent behaviors. The use of LLMs in simulations may hereby vary widely, from highly structured, rule-based prompts that delineate specific actions to more generalized prompts that rely on the LLM’s broader knowledge base. This study highlights two distinct methodologies in applying LLM capabilities to simulate emergent, multi-agent behaviors with varying degrees of prompt specificity and autonomy.
Integrating LLMs with agent-based simulations presents transformative opportunities across various domains, enhancing the realism and complexity of simulations. This integration can significantly improve the modeling of social systems, industrial automation, and multi-agent interactions.
Park et al. [2023] introduce an LLM-driven agent that can engage and converse with both humans and other AI agents. The agent has the capability to generate text that can be comprehended and interpreted by other agents. This facilitates clear communication between them, fostering effective interactions and collaboration. The simulated environment functions as a sandbox composed of text, allowing the agent to perceive and interpret the surrounding context effectively. This setting enables the agent to navigate and interact with the provided information. Inspired by the work of Park et al. [2023], Junprung [2023] presents two LLM-driven experiments, two-agent negotiation, and a six-agent murder mystery game to simulate human behavior. The author describes the behavior of three categorical different LLM-driven simulations and discusses the limitations of large-scale language models.
Gao et al. [2023] create a framework for social network simulation called $S^{3}$ . They simulate motion, attitude, and interactive behaviors to emulate social behavior. Due to the changing environment, the agents have to adapt and retain a memory to utilize past experiences and adjust their behavior. They observe the emergence of collective behavior among the agents and conclude their environment holds potential for further exploration in the fields of social sciences and informed decision-making. This insight suggests that the dynamics observed could provide valuable perspectives on group interactions and collaborative processes.
The research of Dasgupta et al. [2023] investigates the use of LLMs to improve the decision-making abilities of AI agents that interact with their environment. The proposed system consists of three parts: a Planner that uses a pre-trained LLM to generate instructions, a reinforcement-learning agent, the Actor, that carries out these instructions, and a Reporter that provides environmental feedback to the Planner. The Planner reads a description of the task and breaks it down into simple instructions for the Actor, who was trained to understand simple instructions and operates upon them. The Reporter observes the effects of the Actor’s actions on the environment and communicates this information in a text-based form back to the Planner. The system is tested on complex tasks that require reasoning and gathering information, and the results show that it outperforms traditional reinforcement learning methods, especially when using larger language models. The researchers demonstrate that Large language models (70 billion parameters) consistently outperformed smaller language models (7 billion parameters) in the experiments, indicating that larger models have resilience against noisy or irrelevant information and greater capacity for the complex reasoning required to solve these tasks. Zhu et al. [2023] present Ghost in the Minecraft (GITM), a framework for developing general capable agents in the Minecraft world. In contrast to previous approaches, especially reinforcement learning algorithms, GITM uses large language models to achieve high success rates, e.g. in the "Obtain Diamond" task. Typical reinforcement learning-based agents often struggle with the complexity of Minecraft due to the long time horizon of the task, which can lead to difficulties in learning and adapting. In contrast, Zhu et al. [2023] leverages LLMs to enable a hierarchical decomposition of complex tasks into manageable sub-goals and structured actions. This approach yields significantly higher efficiency and robustness, allowing agents to better navigate and interact with the Minecraft environment. GITM integrates the logical reasoning and knowledge base of LLMs with text-based knowledge and memory, enabling effective interaction with the environment and the pursuit of intricate, long-term objectives. The article demonstrates the potential of LLMs for the development of generally capable agents in open, complex environments.
Recently, researchers incorporated LLM into swarm systems to leverage the reasoning and knowledge capabilities of these models [Gao et al., 2024; Qu, 2024]. Strobel et al. [2024] integrate LLMs into robot swarms to enhance their reasoning, planning, and collaboration abilities. They exchange the robot programming controller by proposing two changes: 1) An indirect integration uses LLMs to generate and validate the programming of the controller before or during the deployment. This approach improves efficiency and reduces human error by automating the design process. 2) A direct integration implements a separate LLM for each robot during deployment, enabling the robot to plan, reason, and collaborate using natural language. The LLM-driven robots can detect and respond to unexpected behaviors and are more resilient in dynamic environments without prior information.
Feng et al. [2024] present an algorithm aimed at adapting LLM experts using collaborative search techniques inspired by swarm intelligence. This method allows several LLMs to collaborate in exploring the weight space to optimize a specific utility function without the need for extensive fine-tuning data or strong assumptions about the models involved. In their work, each LLM can be treated as a particle within a swarm navigating within the weight space and adjusting its position based on its best or worst-found solutions. The algorithm demonstrates flexibility in different single or multi-task objectives. Due to their collaborative search approach the LLM experts can discover unseen capabilities, which enables the transition from weak to strong performance levels.
In their work, called Swarm-GPT, Jiao et al. [2023] integrate LLMs with motion-based planning to automate Unmanned Aerial Vehicle (UAVs) swarm choreography. Users are able to generate synchronized drone performance via language commands. Swarm-GPT is able to utilize LLMs to create UAVs formations and movements which are synchronized to music. The system includes a trajectory planner that utilizes waypoints generated by the LLM, guaranteeing that the drone movements are both collision-free and feasible. Swarm-GPT has been effectively demonstrated at live events, highlighting its practical application and ability to perform in real time.
Liu et al. [2024b] explore the application of multimodal LLMs to control the formation of UAVs using image and text inputs. The researchers first pre-trained an LLM on a single UAV, demonstrating the LLM’s potential to interpret and execute commands effectively. Then they expanded their approach to coordinate multiple UAVs in formation. The multimodal LLM recognizes environmental signals from the images captured by the primary drone (via a camera). Then, the pre-trained LLM analyzes the data and generates instructions for managing the UAV to attain a specified formation.
Another application in language-guided formation control is presented by Liu et al. [2024c]. The authors propose a framework called Language-Guided Pattern Formation (LGPF) for swarm robotics. Their system employs an LLM to translate a high-level pattern description into specific actions for a swarm of robots, integrating multi-agent reinforcement learning for detailed control. The LGPF framework allows for intuitive and flexible control of robot swarms, enabling them to achieve complex formations guided by natural language instructions.
## 2 Methods
In this study, we employed two distinct simulations of the behavior of social insects to explore the integration of LLMs in guiding agent behaviors within multi-agent systems. The experiments were designed to investigate the effectiveness of structured, rule-based prompts in one scenario and principle-based, knowledge-driven prompts in the other one. Both simulations utilize the LLM to process environmental inputs and generate agent actions, providing insights into how LLMs can be leveraged to model complex behaviors such as foraging and flocking.
Structured rule-based prompts are designed with explicit, predefined instructions that guide the LLM to generate deterministic agent actions. These prompts specify exact conditions and responses, ensuring consistent and predictable agent behaviors. For example, in a foraging scenario, structured prompts might include direct rules for following pheromone trails or picking up food when encountered.
Knowledge-driven prompts, on the other hand, rely on the LLM’s inherent understanding of broader behavioral concepts and principles. These prompts are less rigid and provide the LLM with general guidelines, enabling more adaptive and flexible agent behaviors. In the context of a bird flocking simulation, such prompts might encourage behaviors based on principles like alignment, cohesion, and separation without specifying exact actions, allowing the LLM to synthesize responses that foster emergent, self-organizing dynamics.
### 2.1 Toolchain for LLM-Driven Multi-Agent Simulations with NetLogo
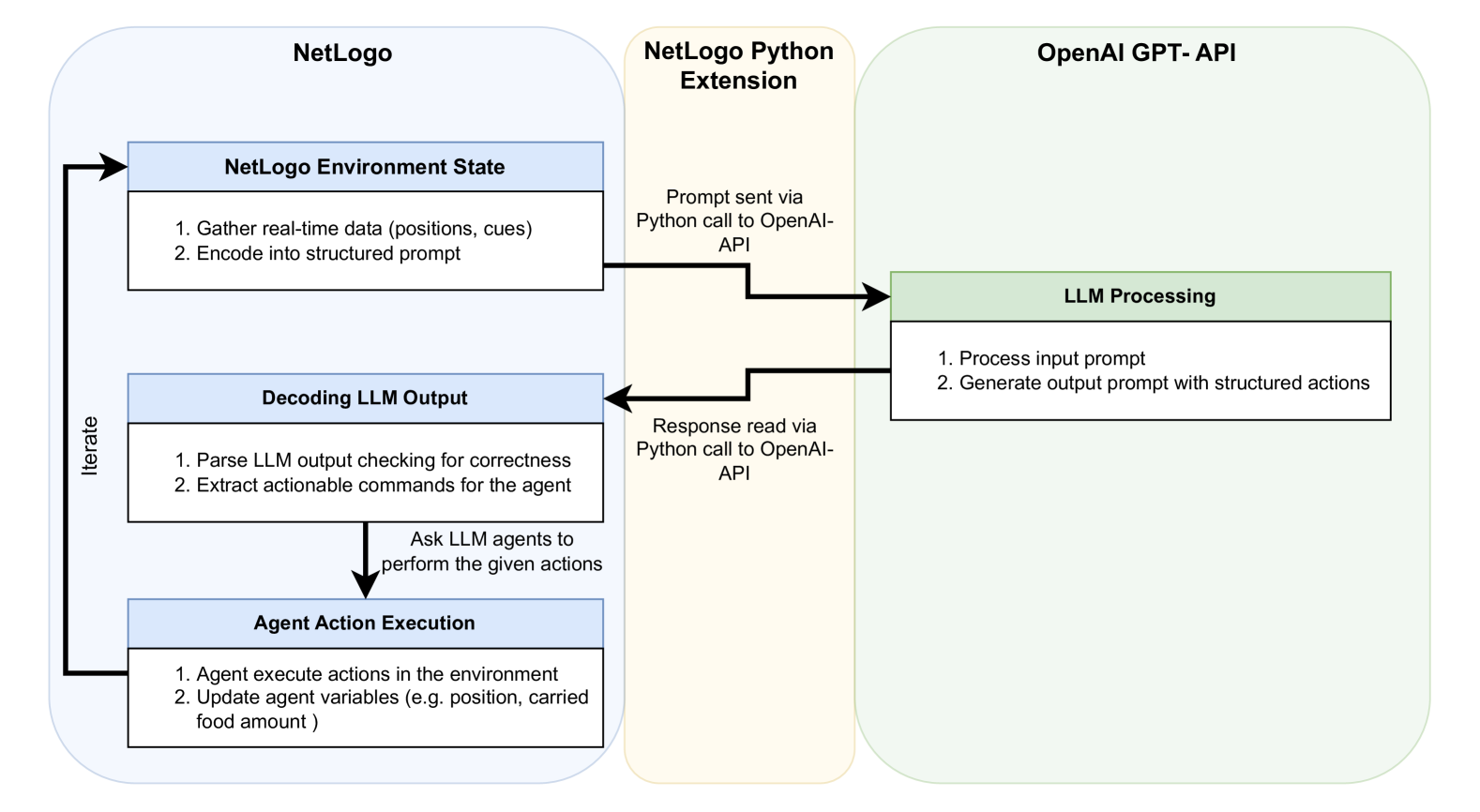
Figure 1 illustrates the toolchain for LLM-driven multi-agent simulations with NetLogo, showing the integration between NetLogo, GPT-4o, and the Python extension. The following describes each step of the workflow:
1. Environment Encoding: The simulation toolchain leverages NetLogo to capture real-time environmental states, including agent positions, inter-agent interactions, and other relevant environmental variables depending on the simulation (e.g. pheromone concentrations). These data are encoded into structured prompts that convey a comprehensive environmental context to the LLM. This encoding ensures that the LLM receives timely, accurate input representing dynamic changes in the environment.
1. Python Extension Integration: NetLogo uses its Python extension to facilitate communication with GPT-4o via the OpenAI API. This extension allows NetLogo to send encoded environmental data as prompts to the LLM and receive structured responses, enabling the interaction between the simulation platform and the LLM.
1. LLM Processing: The structured prompts are processed by GPT-4o, which interprets the input data and generates agent behavior suggestions based on encoded environmental information. The LLM’s ability to process complex, context-rich data allows it to infer and propose actions that adhere to predefined rules (for structured prompts) or leverage general behavioral principles (in principle-based prompts). This stage ensures that agent responses align with the overall objectives of the simulation, be it foraging success or cohesive flocking.
1. Decoding LLM Output: The LLM output, formatted as a structured JSON or Python dictionary, is translated into executable actions predefined within the NetLogo simulation. This step converts the structured actions generated by the LLM into precise instructions for agents, such as movement vectors, state transitions, or pheromone release behaviors. The Python extension facilitates this process by receiving the LLM responses from the OpenAI API and converting them into a NetLogo-compatible data structure. This translation mechanism ensures both syntactic and semantic alignment between the LLM’s output and the data format required by the simulation.
1. Agent Action Execution and Iterative Process: The decoded commands are executed by the agents in NetLogo, updating their states and behaviors in response to the LLM’s instructions. This action directly modifies the simulation environment, forming a closed-loop system where each action feeds back into the environmental context for the next iteration. The iterative process ensures that agent behaviors continuously respond to evolving environmental conditions and LLM feedback, fostering emergent behaviors and adaptive responses.
The following sections detail the setup, LLM integration, and procedures used in each experiment.
<details>
<summary>x4.png Details</summary>
### Visual Description
## Flowchart Diagram: NetLogo-OpenAI Integration Workflow
### Overview
The diagram illustrates a cyclical workflow integrating NetLogo, a Python extension, and the OpenAI GPT-API. It depicts how real-time environmental data is processed through an LLM (Large Language Model) to generate agent actions in a simulated environment. The flow involves data encoding/decoding, API interactions, and iterative agent behavior updates.
### Components/Axes
1. **NetLogo Section (Blue Boxes)**:
- **NetLogo Environment State**:
- Step 1: Gather real-time data (positions, cues)
- Step 2: Encode into structured prompt
- **Decoding LLM Output**:
- Step 1: Parse LLM output for correctness
- Step 2: Extract actionable commands
- **Agent Action Execution**:
- Step 1: Execute actions in environment
- Step 2: Update agent variables (e.g., position, carried food amount)
2. **NetLogo Python Extension (Orange Box)**:
- **Prompt Sent via Python Call to OpenAI API**
- **Response Read via Python Call to OpenAI API**
3. **OpenAI GPT-API (Green Box)**:
- **LLM Processing**:
- Step 1: Process input prompt
- Step 2: Generate output prompt with structured actions
**Flow Arrows**:
- NetLogo → Python Extension (prompt sending)
- Python Extension → OpenAI API (prompt submission)
- OpenAI API → Python Extension (response retrieval)
- Python Extension → NetLogo (decoded commands)
- NetLogo → NetLogo (iterative loop)
### Detailed Analysis
- **NetLogo Environment State**: Initializes the simulation by collecting positional and contextual data, then formats it into a prompt for the LLM.
- **Decoding LLM Output**: Validates the LLM's response for structural integrity before extracting executable commands (e.g., "move north," "collect food").
- **Agent Action Execution**: Implements commands in the NetLogo environment, updating agent states (e.g., position changes, food inventory).
- **Python Extension**: Acts as a bridge, translating NetLogo's structured prompts into API calls and parsing OpenAI's responses.
- **OpenAI GPT-API**: Processes prompts to generate actionable outputs, which are then relayed back through the Python extension.
### Key Observations
1. **Cyclical Workflow**: The system operates in a closed loop, with NetLogo continuously updating the environment state based on agent actions.
2. **Structured Prompts**: Both input and output prompts are explicitly structured to ensure LLM responses are actionable (e.g., "Generate output prompt with structured actions").
3. **Validation Step**: The decoding phase includes a correctness check, suggesting a focus on reliability in LLM outputs.
4. **Variable Updates**: Agent variables (position, food) are explicitly tied to environmental interactions, indicating a dynamic simulation.
### Interpretation
This workflow demonstrates a hybrid system where NetLogo's agent-based modeling is augmented by LLM capabilities via the OpenAI API. The Python extension serves as a critical intermediary, enabling bidirectional communication between NetLogo and the API. The structured prompts and validation steps suggest an emphasis on robustness, ensuring that LLM-generated commands align with the simulation's requirements. The iterative nature of the loop implies real-time adaptability, allowing agents to respond dynamically to environmental changes. The explicit mention of "carried food amount" as an updated variable hints at resource management as a core simulation mechanic.
</details>
Figure 1: Diagram illustrating the toolchain for LLM-driven multi-agent simulations, integrating NetLogo and GPT-4o via the Python extension and OpenAI API. The workflow showcases a closed-loop process where environmental states are encoded into structured prompts, processed by GPT-4o to generate behavior suggestions, decoded into executable actions, and iteratively executed by agents within the NetLogo simulation environment.
## 3 Experiment 1: Ant Colony Foraging Simulation
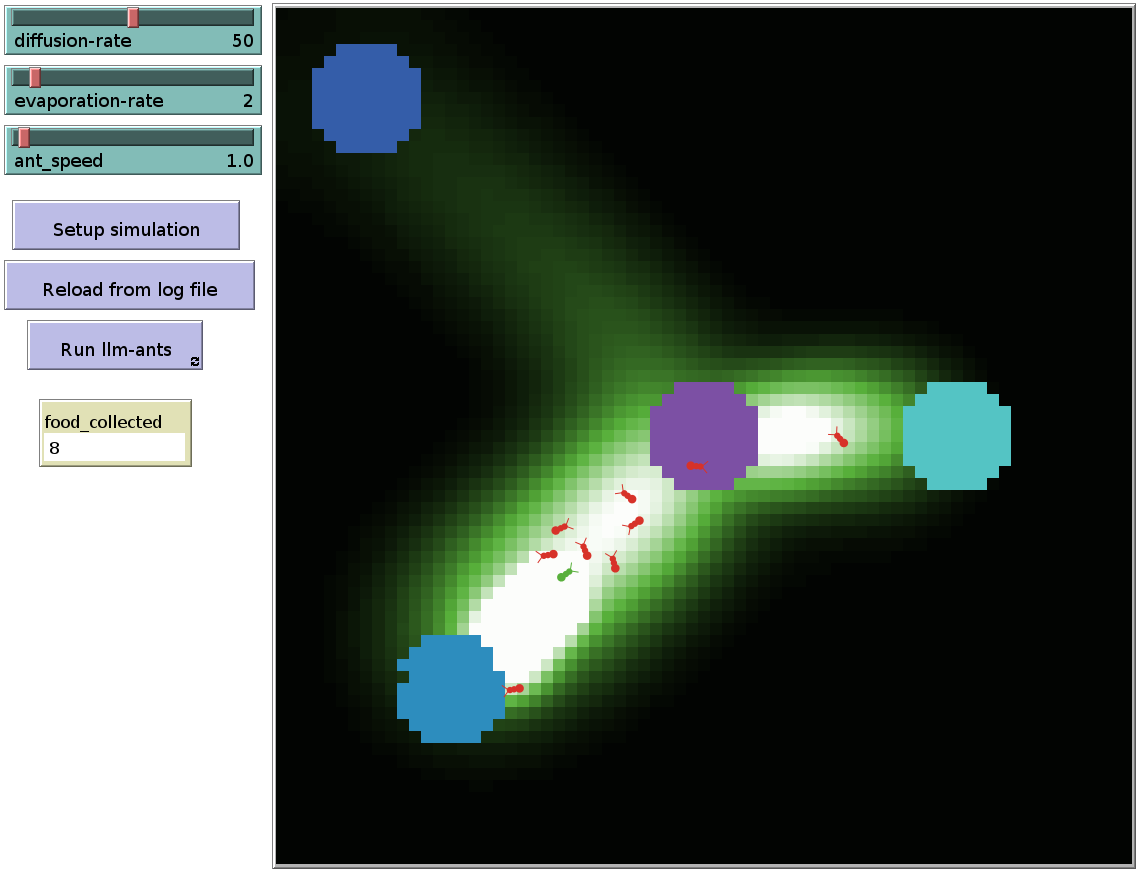
As mentioned above, this experiment is based on the ant foraging model implemented in the NetLogo library (see https://ccl.northwestern.edu/netlogo/models/Ants). It takes place in a two-dimensional foraging area consisting of designated food sources scattered throughout the environment and a central nest where the ants must return to deposit the food they collect. The environment is designed to mimic natural foraging conditions, where agents (ants) must navigate to find food and return it to the nest while interacting with environmental cues such as pheromone trails and nest scents; see Figure 2.
<details>
<summary>extracted/6255105/llm_ants_netlogo_interface.png Details</summary>
### Visual Description
## Simulation Interface: Ant Foraging Behavior Model
### Overview
The image depicts a computational simulation interface modeling ant foraging behavior. The main visualization area shows a grid with colored circular regions and moving red ant icons. Control parameters and status indicators are displayed on the left panel.
### Components/Axes
**Left Control Panel:**
1. **Sliders:**
- `diffusion-rate`: 50 (dark gray bar with red indicator)
- `evaporation-rate`: 2 (dark gray bar with red indicator)
- `ant_speed`: 1.0 (dark gray bar with red indicator)
2. **Buttons:**
- `Setup simulation` (light purple)
- `Reload from log file` (light purple)
- `Run llm-ants` (light purple)
3. **Status Display:**
- `food_collected`: 8 (light green background)
**Main Visualization Area:**
- Grid-based environment with:
- **Cyan circle** (top-left quadrant)
- **Purple circle** (center-right)
- **Cyan circle** (bottom-right quadrant)
- Gradient heatmap showing intensity from cyan (brightest) to purple (darkest)
- Red ant icons moving along gradient paths
### Detailed Analysis
**Parameter Values:**
- Diffusion rate: 50 (high value suggests rapid pheromone spread)
- Evaporation rate: 2 (low value indicates slow pheromone dissipation)
- Ant speed: 1.0 (moderate movement rate)
- Food collected: 8 units (current simulation output)
**Visual Elements:**
1. **Gradient Path:**
- Brightest intensity at cyan circle (top-left)
- Fades through green/yellow to purple circle (center-right)
- Secondary gradient from cyan circle (bottom-right) to purple
2. **Ant Movement:**
- 7 red ant icons visible
- Movement pattern follows gradient paths
- Concentration near purple circle suggests food source
3. **Circular Regions:**
- Cyan circles (2 instances) likely represent food sources
- Purple circle (1 instance) likely represents nest/home base
### Key Observations
1. Ants preferentially move toward purple circle despite multiple food sources
2. Gradient intensity correlates with ant path density
3. High diffusion rate (50) creates broad gradient spread
4. Low evaporation rate (2) maintains gradient persistence
5. Ant speed (1.0) balances exploration/exploitation
### Interpretation
This simulation demonstrates emergent behavior in ant colony optimization algorithms. The parameters suggest:
- **Pheromone Dynamics:** High diffusion ensures widespread trail information, while low evaporation maintains trail persistence for effective foraging.
- **Foraging Strategy:** Ants follow gradient intensity (likely representing pheromone concentration or food quality), demonstrating stigmergic communication.
- **Resource Allocation:** The 8 food units collected indicate successful pathfinding despite multiple food sources.
- **Algorithmic Efficiency:** The system balances exploration (multiple paths) and exploitation (convergence to optimal path) through parameter tuning.
The interface provides real-time feedback through the food counter and visual gradient, allowing users to experiment with parameter adjustments to optimize foraging efficiency. The gradient visualization serves as both a data representation and a control mechanism, creating an interactive learning environment for swarm intelligence concepts.
</details>
Figure 2: Ant foraging simulation in NetLogo. The central circle depicts the nest area, while the three blue circles nearby indicate food sources.
- Agents: The simulation features stateless ants, each operating as an independent agent without memory of past actions. These ants rely entirely on real-time environmental inputs and LLM-generated prompts to determine their behaviors. The agents are designed to follow explicit, rule-based instructions derived from the LLM, ensuring that their actions are predictable and consistent with predefined conditions.
- LLM Integration: OpenAI GPT-4o is employed to process structured prompts that define the ants’ behaviors. The default API parameters are used, with the exception of the temperature, which is set to 0.0 to ensure deterministic results based on the provided inputs. The LLM receives real-time environmental information and generates actions according to a predefined set of rules. These structured prompts ensure that the ants’ responses are clearly defined and predictable, enabling systematic analysis of their behavior. Nevertheless, there is still a small chance that the LLM may occasionally generate responses that deviate from the specified rules.
### 3.1 Procedure
#### 3.1.1 Prompt Design
The prompt is structured as a zero-shot prompt, requiring the LLM to generate accurate responses without relying on prior examples or contextual memory from previous interactions. This intentional design maintains stateless prompts to control the agents. We employed an API function that does not retain conversation context between prompts, making each interaction independent and requiring the LLM to interpret and respond solely based on the current input. The final prompt used in our experiments resulted from several iterations in a trial-and-error process to ensure the LLM could effectively understand the environment and rules and execute the expected tasks accordingly. For this experiment, precise behavioral rules were provided for the ants within the simulation, including instructions such as following pheromone trails when searching for food, picking up food when encountered, and releasing pheromones to mark food sources.
#### 3.1.2 Tuning Process
Our initial approach utilized minimal instructions, providing a general description of the foraging task to assess how effectively ants could perform without specific guidance. This method aimed to determine the necessity of detailed instructions for reproducing pheromone-guided foraging behavior.
As the project progressed, it became clear that more explicit rules were essential for consistent and realistic ant behavior. Throughout this iterative process, the language model offered valuable feedback by highlighting misunderstandings or ambiguities in the prompts. This feedback was instrumental in refining the prompts to enhance the ants’ performance. Below, we present an analysis of how these prompts evolved, focusing on specific improvements and the reasoning behind each iteration.
Iteration 1
- Prompt Text
⬇
1 You are an ant in a 2 D simulation tasked with finding food, marking the path to food with trails of pheromones, and using nest scent to navigate back to the nest when carrying food.
2
3 Format your actions as a Python dictionary with these keys and options:
4 " move - forward ": True or False,
5 " rotate ": " left ", " right ", or " none ",
6 " pick - up - food ": True or False,
7 " drop - pheromone ": True or False,
8 " drop - food ": True or False.
9
10 You will be provided with environment information. Keep your response concise, under 3 5 tokens.
11
12 Current environment:
13 - Pheromone concentration (Left: 0, Front: 0, Right: 0),
14 - Nest presence: True,
15 - Nest scent (Left: 1 9 6. 8 4, Front: 1 9 6. 3 9, Right: 1 9 5. 7 6),
16 - Food concentration at your location: 0,
17 - Carrying food status: True
- Observed Behavior
In this first attempt, we provided general instructions to establish a baseline for ant behavior. The ants were tasked with finding food, marking paths with pheromones, and using nest scent to return home when carrying food. However, simulations revealed inconsistencies. Ants often failed to follow pheromone and nest scent gradients effectively, sometimes moving away from stronger cues. Some ants released pheromones unexpectedly, while others exhibited random movement patterns. This inconsistency prevented the colony from displaying an organized foraging behavior, indicating that clearer rules were needed for actions such as pheromone release and gradient follow-up.
- Analysis
While this prompt established the basic framework for the simulation, it lacked specific guidance on how ants should interpret and prioritize environmental cues or resolve conflicting signals. The absence of detailed instructions led to ambiguous behaviors, including inconsistencies in following pheromone and nest scent gradients. This highlighted the need for more explicit rules to ensure consistent and organized swarm behavior.
Iteration 2
- Prompt Text
We add an instruction to the prompt to prioritize nest scent over pheromone trails when carrying food.
⬇
1 You are an ant in a 2 D simulation tasked with finding food, marking the path to food with pheromone trails, and using nest scent to navigate back to the nest when carrying food. Prioritize nest scent over pheromone trails when carrying food.
2 …
- Observed Behavior
To address the issues from the first prompt, we added a directive for ants to prioritize nest scent over pheromone trails when carrying food, aiming to better mimic foraging ant behavior. Despite this improvement, ants still exhibited inconsistencies in following pheromone and nest scent gradients. When nest scent and pheromone trails had similar strengths, ants demonstrated conflicting actions. Additionally, the prompt did not specify behaviors for ants not carrying food, leading to inefficient exploration. Ants tended to rotate aimlessly near the nest and were slow to venture outward, showing the need for clearer guidance to improve exploration efficiency.
- Analysis
Introducing prioritization helped align the ants’ actions when carrying food, but inconsistencies in following scent gradients persisted. Ants not carrying food and not sensing any pheromones tended to remain near the nest without effectively exploring the environment. This emphasized the necessity for comprehensive guidance covering all possible states and clearer instructions on responding to environmental cues to enhance exploration efficiency.
Iteration 3
- Prompt Text
As before, with added clarifications in the current environment:
⬇
1 …
2 - Nest presence: True (You are currently at the nest),
3 - Carrying food status: True (You are currently carrying food)
4 …
- Observed Behavior
We observed that ants sometimes failed to pick up food or drop it at the nest, possibly due to a lack of awareness of their current state. To rectify this, we explicitly stated their status in the prompt, such as whether they were at the nest or carrying food. This redundancy ensured that ants performed correct actions in these situations. However, inconsistencies in following pheromone and nest scent gradients remained. Ants continued to exhibit limited exploration when not carrying food, tending to stay near the nest rather than venturing into new areas or effectively following pheromone trails.
- Analysis
Explicitly stating the ants’ status improved decision-making by providing clear context, leading to better execution of actions like picking up and dropping food. Yet, the lack of specific instructions on following scent gradients meant ants still showed inconsistencies in navigating toward pheromone trails or nest scent. Their inefficient exploration highlighted the need for clearer guidance to enhance movement away from the nest.
Iteration 4
- Prompt Text
We add an instruction to the prompt to use the highest pheromone scent to navigate to food when not carrying any.
⬇
1 You are an ant in a 2 D simulation. Your task is to pick up food and release it at the nest. Use nest scent to navigate back to the nest when carrying food, prioritizing nest scent over pheromones. Use highest pheromone scent to navigate to food when not carrying any.
2 …
- Observed Behavior
To guide ants not carrying food, we specified that they should navigate toward food using the highest pheromone concentration. Their ability to find food sources when pheromone trails were present was clearly improved in this way. However, inconsistencies in following pheromone gradients persisted. In the absence of pheromones or nest scents, ants tended to remain near the nest, exhibiting inefficient exploration behaviors.
- Analysis
By distinguishing between the states of carrying and not carrying food, we enhanced the ants’ foraging efficiency when environmental cues were available. Nonetheless, inconsistencies in following pheromone gradients indicated that ants needed clearer instructions on interpreting and acting upon varying scent intensities. The lack of an effective exploration strategy, when cues were absent, remained a challenge.
Iteration 5
- Prompt Text
Environmental information about pheromone concentration and nest scent presented with directional cues instead of quantities:
⬇
1 …
2 Current environment:
3 - Higher Pheromone Concentration: Front,
4 - Nest Presence: False (You are not currently at the nest),
5 - Stronger Nest Scent: Left,
6 - Food Concentration at your location: 0,
7 - Carrying Food Status: True (You are currently carrying food)}
- Observed Behavior
Recognizing the need for better interpretation of environmental cues, we modified how information was presented by using directional descriptions instead of numerical values—–e.g., “Higher Pheromone Concentration: Front” and “Stronger Nest Scent: Left.” This adjustment significantly improved the ants’ ability to follow pheromone and nest scent gradients. Ants became more consistent in moving toward stronger cues, enhancing their navigation and foraging efficiency.
However, when no scents were detected, ants still showed limited exploration, often remaining near the nest rather than actively searching new areas. This indicated that while gradient following had improved, the exploration strategy was still inefficient in the absence of sensory cues.
- Analysis
Using directional cues provided clearer guidance on responding to environmental gradients, resolving many inconsistencies observed in previous prompts. From Prompt 5 onward, ants became more adept at following pheromone and nest scent gradients, leading to a more organized foraging behavior. Despite these improvements, ants’ exploration remained inefficient when no sensory cues were present, indicating a need for further instructions to promote effective exploration.
Iteration 6
- Prompt Text
We add an instruction to the prompt to release pheromones on food sources and while carrying food.
⬇
1 You are an ant in a 2 D simulation. Your task is to pick up food and release it at the nest. Release pheromone on food source and while you are carrying food. Use nest scent to navigate back to the nest when carrying food, prioritizing nest scent over pheromones. Use highest pheromone scent to navigate to food when not carrying any.
2 …
- Observed Behavior
To encourage trail formation back to the nest, we instructed ants to release pheromones while carrying food. This led to stronger trails and improved the efficiency of other ants in locating food sources. With the improved gradient-following ability from Prompt 5, ants were more consistent in navigation.
Nevertheless, in the absence of pheromones and nest scents, ants still exhibited limited exploration behaviors, tending to stay near the nest. This indicated that their exploration strategy was still inefficient and required refinement.
- Analysis
By enhancing pheromone deposition during food transport and improving gradient following, we boosted colony cooperation and foraging success. However, the persistent issue of limited exploration in scent-free areas indicated that additional instructions were necessary to promote outward movement and enhance exploration efficiency.
Iteration 7
- Prompt Text
We added the word “only” in the prompt as follows:
⬇
1 You are an ant in a 2 D simulation. Your task is to pick up food and release it at the nest. Release pheromone on food source and while you are carrying food. Use nest scent to navigate back to the nest only when carrying food, prioritizing nest scent over pheromones. Use highest pheromone scent to navigate to food when not carrying any.
2 …
- Observed Behavior
In earlier iterations, ants sometimes prioritized nest scent over pheromones even when not carrying food, leading them to return to the nest unnecessarily. With this clarification, the ants began to prioritize the nest scent appropriately, using it only when they were carrying food. However, ants still exhibited limited exploration when no sensory cues were present, tending to remain near the nest rather than actively searching new areas.
- Analysis
Adding “only” to the instruction text was crucial to ensure that the ants did not prioritize the scent of the nest when they were looking for food. This eliminated unnecessary returns and improved foraging efficiency.
Iteration 8
- Prompt Text
We added an instruction to the prompt to move away from the nest and rotate randomly if not carrying any food and not sensing any pheromone.
⬇
1 You are an ant in a 2 D simulation. Your task is to pick up food and release it at the nest. Release pheromone on food source and while you are carrying food. Use nest scent to navigate back to the nest only when carrying food, prioritizing nest scent over pheromones. Use highest pheromone scent to navigate to food when not carrying any. Move away from nest and rotate randomly if you are not carrying any food and you are not sensing any pheromone.
2 …
- Observed Behavior
In previous iterations, we observed limited exploratory behavior of the ants in areas without scents. To address this, we introduced a directive for proactive exploration. This approach improved exploration, with ants venturing further from the nest and discovering food sources in fewer simulation steps. However, a noticeable bias concerning the rotation remained, particularly around the nest, indicating that the randomness was not functioning as efficiently as intended.
- Analysis
By instructing ants to move away from the nest and rotate randomly when not carrying food and not sensing pheromones, we encouraged them to explore new areas more effectively. This change increased the likelihood of ants finding food, as they ventured further from the nest rather than lingering nearby.
Iteration 9
- Prompt Text
We expanded the rotation options to include “random”:
⬇
1 …
2 " rotate ": " left ", " right ", " none ", or "random"
3 …
- Observed Behavior
With this adjustment, ants demonstrated more varied and unpredictable movement patterns during exploration. They effectively moved away from the nest and searched a wider area, increasing their chances of encountering food sources more quickly and efficiently.
- Analysis
To enhance the randomness of the ants’ exploration, we expanded their rotation options to include “random.” This meant that when the LLM selected “random” as the rotation action, it was making a high-level decision to delegate the choice of direction to chance. In the simulation, this “random’ ’ option was implemented at a programming level in NetLogo to randomly choose the direction of rotation either left or right.
Through iterative tuning, we significantly enhanced the simulated ants’ behavior, making it more consistent with the ant foraging dynamics observed in the rule-based NetLogo model. Each prompt iteration addressed specific issues identified in simulations, with language model feedback guiding some of the adjustments.
#### 3.1.3 Prompt Deployment
The prompts are presented in a format that the LLM can process and output as a series of actionable commands. Communication with the LLM is facilitated through the OpenAI API, specifically using the chat.completions mechanism, which allows context-free messages to be passed at each step. This setup involves sending a system prompt that outlines the overall task and rules, followed by user prompts that provide real-time environmental information.
At each simulation step, NetLogo translates the agent’s perception of its environment into the input variables described in the prompt. This ensures that the LLM has an accurate and up-to-date representation of the environment on which its decisions can be based. The LLM then generates a response formatted as a Python dictionary, containing specific actions the agent should take. The following example prompt illustrates the process:
- System Prompt
⬇
1 You are an ant in a 2 D simulation. Your task is to pick up food and release it at the nest. Release pheromone on food source and while you are carrying food. Use nest scent to navigate back to the nest only when carrying food, prioritizing nest scent over pheromones. Use highest pheromone scent to navigate to food when not carrying any. Move away from nest and rotate randomly if you are not carrying any food and you are not sensing any pheromone. Format your actions as a Python dictionary with these keys and options:
2
3 " move - forward " (options: True, False)
4 " rotate " (options: " left ", " right ", " none ", " random " )
5 " pick - up - food " (options: True, False)
6 " drop - pheromone " (options: True, False)
7 " drop - food " (options: True, False).
8
9 You will be provided with environment information. Keep your response concise, under 4 5 tokens.
- Possible User Prompt
⬇
1 This is your current environment:
2 - Highest Pheromone Concentration: None,
3 - Nest Presence: True (You are currently at the nest),
4 - Stronger Nest Scent: Front,
5 - Food Concentration at your location: 0,
6 - Carrying Food Status: False (You are not currently carrying food).
- Possible response from the LLM
⬇
1 {
2 " move - forward ": True,
3 " rotate ": " none ",
4 " pick - up - food ": False,
5 " drop - pheromone ": False,
6 " drop - food ": False
7}
### 3.2 System Monitoring
The simulation monitors the ants’ efficiency in navigating the environment, specifically their ability to locate food, follow pheromone trails, and return food to the nest. Key metrics include the time taken to find and return food, the consistency of pheromone trail usage, and the accuracy of following the nest scent when carrying food. The observed behaviours and performance analysis are documented in the result section.
## 4 Experiment 2: Bird Flocking Simulation
As mentioned before, the bird flocking model of NetLogo (see https://ccl.northwestern.edu/netlogo/models/Flocking) is an implementation of the famous Boids model from [Reynolds, 1987]. The simulation takes place in two-dimensional airspace. Although this environment is relatively simple, it effectively replicates key flocking behaviors like group cohesion, allowing for the observation of flocking dynamics under varying conditions. By adjusting specific parameters, the simulation provides insights into how changes in the environment influence flocking behavior.
- Agents: The agents in this simulation are modeled as birds, each operating under principle-based prompts. Unlike rule-based systems, these birds are guided by general principles of flocking dynamics, that is, by alignment, separation, and cohesion [Reynolds, 1987]. These principles help the birds navigate their environment by adjusting their headings in response to the positions and headings of neighboring birds.
- LLM Integration: The prompts provided to the LLM leverage its inherent knowledge of flocking dynamics, requiring it to apply these general principles to guide the behavior of each bird. The LLM is responsible for interpreting environmental data and generating responses that ensure the birds align with their flockmates, maintain an appropriate distance to avoid collisions, and stay cohesive as a group.
### 4.1 Procedure
#### 4.1.1 Prompt Design
Similar to the setup in the case of ant foraging, prompts for the flocking task are structured as zero-shot prompts, meaning they operate without prior examples or contextual memory from previous interactions. The final prompt was tuned through several iterations (see below) in a trial-and-error process to ensure the LLM could effectively interpret the environment and calculate heading directions according to flocking principles. Each prompt guiding a bird is designed to determine its heading based on the three core principles of flocking dynamics as implemented in the NetLogo library: Separation (steering to avoid crowding neighbors), Alignment (steering towards the average heading of nearby birds), and Cohesion (steering towards the average position of nearby flockmates).
#### 4.1.2 Tuning Process
As will be shown below, it was crucial to explicitly state in the prompt that the compass convention is used in the simulation. This alignment with NetLogo’s world representation, where headings are measured in degrees—0 degrees pointing north, 90 degrees east, 180 degrees south, and 270 degrees west—was essential. Clearly defining this convention ensured that the LLM could accurately compute and adjust the birds’ headings according to flocking dynamics, maintaining consistency in the agents’ behavior within NetLogo’s simulation environment.
Iteration 1
- Prompt Text
⬇
1
2 You are an agent in a 2 D simulation. Your task is to determine your new heading based on the flocking principles of separation turn, alignment turn (average heading of neighbors), and coherence turn (average heading towards flockmates). The parameters for these principles are: maximum - separate - turn, maximum - align - turn, maximum - cohere - turn, minimum - separation - distance. The simulation provides the following information: Current heading, Neighbors in vision radius.
3
4 Provide your final new heading after applying these rules, expressed as an angle in degrees. The result should be in JSON format, with the key and value: " new - heading " (value: heading in degrees). Summarize your answer in no more than 1 2 0 words.
5
6 These are the flocking parameters:
7
8 Maximum separate turn: 1. 5
9 Maximum align turn: 5
10 Maximum cohere turn: 3
11 Minimum separation: 1
12
13 This is your current environment:
14
15 Current heading: 1 3 8 deg
16 Neighbors in vision radius: neighbor_1: x: 0. 5 3, y: - 3. 6 9, heading: 2 4 8 deg
- Observed Behavior
In this initial attempt, we provided general instructions to establish a baseline for flocking behavior. The agents were instructed to determine their heading based on the principles of separation, alignment, and coherence. However, most of the LLM-generated responses were not interpretable by the simulation, as they did not adhere to the expected format. Additionally, even when successfully parsed, inconsistencies in the agents’ behavior were observed, preventing the emergence of flocking.
- Analysis
While this prompt defined the basic framework for the simulation, it lacked constraints to enforce a structured response. In many cases, the LLM’s output included extended textual and mathematical explanations before or alongside the JSON object, which interfered with proper parsing.
Iteration 2
- Prompt Text
An explicit instruction was added to limit the response to the JSON object only.
⬇
1 …
2 Provide your final new heading after applying these rules, expressed as an angle in degrees. The result should be in JSON format only, with the key and value: " new - heading " (value: heading in degrees). Summarize your answer in no more than 1 2 0 words.
3 …
- Observed Behavior To address the issues from the first iteration, we added a directive restricting the response format to a JSON object only. This modification successfully constrained the output, making it more reliable and compatible with the simulation. However, while some flocking behavior emerged, it was inconsistent. Small clusters formed briefly, but overall alignment and coherence were weaker than expected.
- Analysis We compared the resulting headings with those produced by a rule-based model. While some calculated headings were numerically similar, they often pointed in opposite directions. This suggested ambiguity in the LLM’s coordinate system. Since NetLogo employs a compass convention for heading calculations, we decided to explicitly specify this convention in the next iteration.
Iteration 3
- Prompt Text
An instruction was added to specify that the compass convention should be used.
⬇
1 You are an agent in a 2 D simulation. Following the compass convention, your task is to determine your new heading based on the flocking principles of separation turn, alignment turn (average heading of neighbors), and coherence turn (average heading towards flockmates)
2 …
- Observed Behavior By explicitly specifying the compass convention for heading calculations, flocking behavior improved. Larger clusters formed compared to previous iterations. However, flocking remained inconsistent, as some agents moved in seemingly random directions.
- Analysis Examining the erratic headings, we requested the LLM to explain its calculations. When generating a reasoning process before outputting the final heading, the LLM produced correct answers. However, errors occurred when providing only the numerical result. This highlighted the need for a structured reasoning process, or “chain of thought,” to ensure accurate heading calculations.
Iteration 4
- Prompt Text
A new key, “rationale”, was added to the JSON output to encourage reasoning before determining the final heading.
⬇
1 …
2 Provide your final new heading after applying these rules, expressed as an angle in degrees. The result should be in JSON format only, with the keys and values: " rationale " (value: your explanation) and " new - heading " (value: heading in degrees).
3 …
- Observed Behavior Introducing the “rationale” key significantly improved flocking behavior. The agents demonstrated more consistent heading adjustments, enhancing the emergence of flocking dynamics. However, occasional errors persisted, particularly when agents needed to turn counterclockwise to reach a nearby target heading.
- Analysis The “rationale” key enabled the LLM to engage in a structured thought process, substantially improving flocking behavior. However, some agents still moved in the opposite direction when making small adjustments, particularly for counterclockwise turns. This suggested that additional guidance was necessary to ensure agents always chose the shortest rotation path.
Iteration 5
- Prompt Text
An explicit instruction was added to ensure the shortest rotational path (clockwise or counterclockwise) was always chosen when adjusting the heading.
⬇
1 You are an agent in a 2 D simulation. Following the compass convention, your task is to determine your new heading based on the flocking principles of separation turn, alignment turn (average heading of neighbors), and coherence turn (average heading towards flockmates). The parameters for these principles are: maximum - separate - turn, maximum - align - turn, maximum - cohere - turn, minimum - separation - distance. The simulation provides the following information: Current heading, Neighbors in vision radius. When calculating the alignment turn, always choose the shortest path (clockwise or counterclockwise) to align with the average heading of neighbors.
2 …
- Observed Behavior By explicitly instructing the model to select the shortest path to the target heading, flocking behavior improved significantly. The LLM-driven agents formed larger, more stable flocking clusters, achieving performance comparable to the original, rule-based NetLogo model.
- Analysis Including the shortest-path directive ensured that LLM-based agents correctly aligned their heading adjustments with both LLM-based and rule-based agents. This modification resolved the previously observed issues, leading to a more coherent and emergent flocking behavior.
#### 4.1.3 Prompt Deployment
This task uses the same prompt deployment mechanism as Experiment 1. Communication with the LLM is handled via the OpenAI API using the chat.completions mechanism, which supports context-free messaging. A system prompt defines the task and rules, followed by a user prompt providing real-time environmental data.
At each simulation step, NetLogo translates the agent’s perception into the input variables in the prompt, including the heading and position of other agents within its vision radius, into the input variables used in the prompt. This ensures the LLM has an accurate, up-to-date view of the environment. The LLM then generates a response formatted in JSON, specifying the agent’s actions. The following example prompt illustrates this process:
- System Prompt
⬇
1 You are an agent in a 2 D simulation. Following the compass convention, your task is to determine your new heading based on the flocking principles of separation turn, alignment turn (average heading of neighbors), and coherence turn (average heading towards flockmates). The parameters for these principles are: maximum - separate - turn, maximum - align - turn, maximum - cohere - turn, minimum - separation - distance. The simulation provides the following information: Current heading, Neighbors in vision radius. When calculating the alignment turn, always choose the shortest path (clockwise or counterclockwise) to align with the average heading of neighbors.
2
3 Provide your final new heading after applying these rules, expressed as an angle in degrees. The result should be in JSON format only, with the keys and values: ’ rationale ’ (value: your explanation) and ’ new - heading ’ (value: heading in degrees).
- Possible User Prompt
⬇
1 These are the flocking parameters:
2 - Maximum separate turn: 1. 5,
3 - Maximum align turn: 5,
4 - Maximum cohere turn: 3,
5 - Minimum separation: 1. 5;
6
7 This is your current environment:
8 - Current heading: 1 3 8 deg,
9 - Neighbors in vision radius: neighbor_1: x: 0. 5 3, y: - 3. 6 9, heading: 2 4 8 deg;
- Possible Response of the LLM
⬇
1 {
2 " rationale ": Given the current heading of 1 3 8 degrees and one neighbor at (0. 5 3, - 3. 6 9) with a heading of 2 4 8 degrees, we first calculate the separation turn. The distance to the neighbor is sqrt (0. 5 3 ^ 2 + (- 3. 6 9)^ 2) = 3. 7 3, which is greater than the minimum separation distance of 1. 5, so no separation turn is needed. For alignment, the average heading of the neighbor is 2 4 8 degrees. The shortest path to align with 2 4 8 degrees from 1 3 8 degrees is clockwise, which is a turn of 1 1 0 degrees. However, the maximum align turn is 5 degrees, so we turn 5 degrees clockwise to 1 4 3 degrees. For coherence, since there is only one neighbor, the average heading towards the neighbor is the same as the neighbor ’ s heading, 2 4 8 degrees. The shortest path to align with 2 4 8 degrees from 1 4 3 degrees is clockwise, which is a turn of 1 0 5 degrees. However, the maximum cohere turn is 3 degrees, so we turn 3 degrees clockwise to 1 4 6 degrees. The final new heading is 1 4 6 degrees.,
3 " new - heading ": 1 4 6
4}
### 4.2 Monitoring Behavior
Key metrics include the degree of separation maintained between agents, the consistency of alignment with the average heading of nearby birds, and the effectiveness of cohesion in moving toward the flock’s center of mass. The observed behaviors and performance analyses are documented in the results section.
## 5 Results
### 5.1 Experiment 1: Ant Foraging with Structured Rule-Based Prompting
The following three variants of the ants foraging simulation were applied:
1. The original NetLogo model (henceforth simply called “NetLogo”).
1. The model in which the rule-governed ants of the original model are replaced by LLM-governed ants (henceforth called “LLM”).
1. A hybrid model in which half of the ants are rule-governed and the other half are LLM-governed (henceforth called “Hybrid”).
In all simulations, we used a colony of 10 ants, three food patches to be exploited, and a stopping criterion of 1000 simulation steps. Moreover, each experiment was repeated five times (with different seeds). The efficacy of each model was assessed by quantifying the total amount of food gathered within these 1000 simulation steps.
#### 5.1.1 Food collection behavior
<details>
<summary>x5.png Details</summary>
### Visual Description
## Line Graph: Model Variant Performance Over Steps
### Overview
The image depicts a line graph comparing the performance of three computational models (LLM, NetLogo, Hybrid) in terms of "Food Amount" accumulated over "Step Number." The graph includes a main plot and an inset zoomed-in view of the first 100 steps. All models show upward trends, with shaded regions indicating variability or confidence intervals.
### Components/Axes
- **X-axis (Step Number)**: Ranges from 0 to 1000 in increments of 200. Labeled "Step Number."
- **Y-axis (Food Amount)**: Ranges from 0 to 100 in increments of 20. Labeled "Food Amount."
- **Legend**: Located in the top-left corner, associating:
- **Green line**: LLM
- **Orange line**: NetLogo
- **Blue line**: Hybrid
- **Inset Graph**: Positioned in the bottom-left corner, showing a magnified view of steps 0–100 and food amounts 0–40.
### Detailed Analysis
1. **Main Chart Trends**:
- **Hybrid (Blue)**: Consistently the highest-performing model, reaching ~95 food units at step 1000. The line slopes steeply upward with moderate variability (shaded blue region).
- **NetLogo (Orange)**: Second-highest performance, reaching ~82 food units at step 1000. The line slopes upward but with greater variability than Hybrid (shaded orange region).
- **LLM (Green)**: Lowest performance, reaching ~85 food units at step 1000. The line slopes upward but with the least variability (narrowest shaded green region).
2. **Inset Graph (Steps 0–100)**:
- All models start near 0 food units at step 0.
- Hybrid gains the most food by step 100 (~22 units), followed by NetLogo (~18 units) and LLM (~15 units).
- Variability is minimal in the early steps, with Hybrid showing the steepest initial growth.
### Key Observations
- **Performance Divergence**: The Hybrid model outperforms others significantly by step 1000, while LLM lags behind despite similar early-step growth.
- **Variability**: Hybrid exhibits the widest confidence interval, suggesting higher uncertainty in its outcomes compared to LLM and NetLogo.
- **Early vs. Late Steps**: The inset reveals that performance gaps between models narrow in the first 100 steps but widen dramatically afterward.
### Interpretation
The data suggests that the Hybrid model combines strengths from LLM and NetLogo to optimize food accumulation more effectively. Its higher variability may indicate exploratory behavior or adaptive strategies that yield better long-term results. LLM’s consistent but lower performance implies limitations in scalability or efficiency. NetLogo’s intermediate performance suggests it balances exploration and exploitation better than LLM but less effectively than Hybrid. The widening gaps after step 100 highlight the importance of model architecture in sustained optimization tasks.
</details>
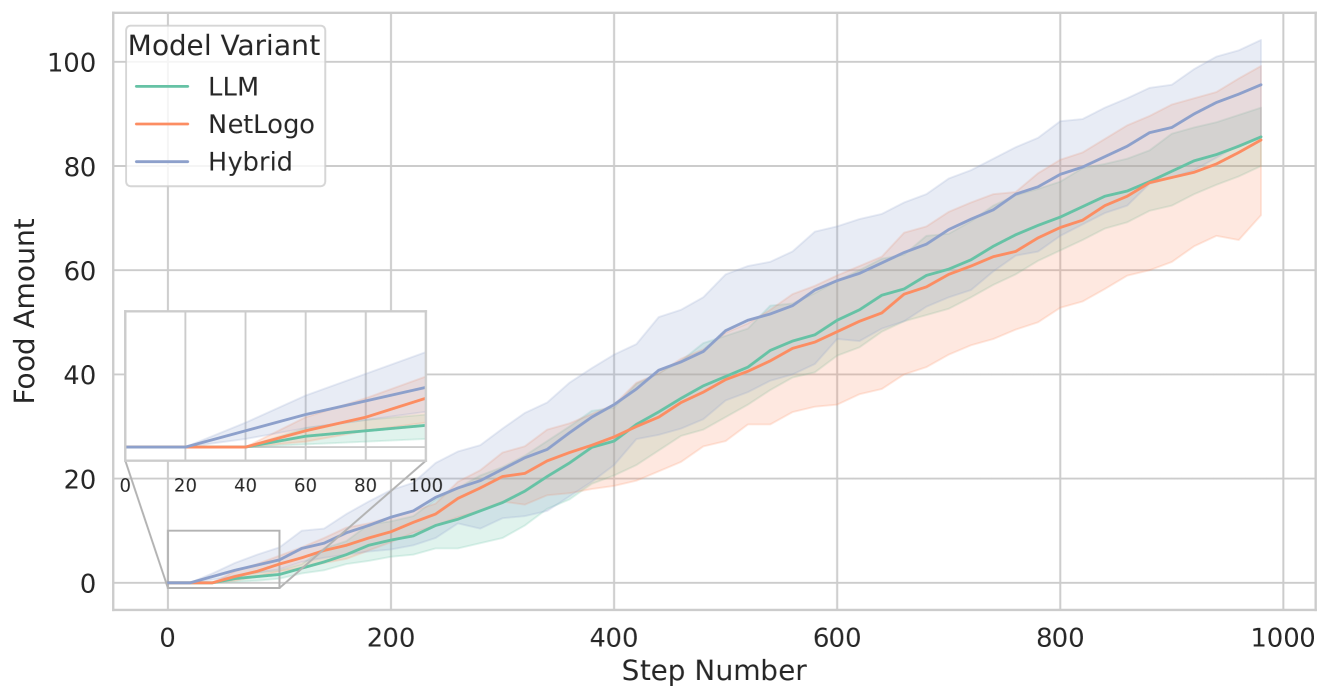
Figure 3: Comparison of the total food collected across the three tested models: NetLogo (represented by the orange line), LLM (green line), and Hybrid (blue line). This visualization highlights the food collection performance differences among the different models over five runs with different seeds. The lines represent the means, while the shaded areas indicate the standard deviations.
Figure 3 shows the total amount of food collected over 1000 simulation steps for the three different model variants. NetLogo and LLM perform similarly in terms of the ants’ success in bringing food back to the nest, with both models accumulating approximately 85 units of food by the end of the simulation. However, the standard deviation for NetLogo is around 20, whereas LLM displays a much lower standard deviation of about 7.
In contrast, the Hybrid model outperforms the other two variants, collecting an average of approximately $95$ units of food with a standard deviation of about $12$ . This superior performance is due to the combination of the behavioural differences between LLM-guided ants and rule-based ants. The zoomed inset in Figure 3, for example, shows that Hybrid starts returning food to the nest at around 20 simulation steps, whereas LLM and NetLogo begin this process at about 40 steps. This means that, for some reason, the Hybrid variant is more efficient in quickly finding food sources.
<details>
<summary>x6.png Details</summary>
### Visual Description
## Box Plot: Steps Required by Model Variants Across Food Patches
### Overview
The image displays a comparative box plot analysis of three computational models (LLM, NetLogo, Hybrid) across three food patch scenarios (1, 2, 3). The y-axis measures "Steps" (15–50), while the x-axis categorizes data by food patch. Each model variant is represented by distinct colors: green (LLM), orange (NetLogo), and blue (Hybrid). Outliers are marked as individual dots beyond whisker ranges.
### Components/Axes
- **X-axis (Food Patch)**: Categorical scale with three discrete values (1, 2, 3).
- **Y-axis (Steps)**: Numerical scale from 15 to 50, incremented by 5.
- **Legend**: Positioned at bottom-right, mapping colors to model variants:
- Green = LLM
- Orange = NetLogo
- Blue = Hybrid
- **Box Plot Elements**:
- Median line (bold horizontal line within each box)
- Interquartile range (IQR) (box boundaries)
- Whiskers (extending to 1.5×IQR)
- Outliers (dots beyond whiskers)
### Detailed Analysis
#### Food Patch 1
- **LLM (Green)**:
- Median: ~22 steps
- IQR: 20–25 steps
- Range: 15–30 steps
- Outliers: 1 dot at ~48 steps
- **NetLogo (Orange)**:
- Median: ~20 steps
- IQR: 18–24 steps
- Range: 14–32 steps
- **Hybrid (Blue)**:
- Median: ~23 steps
- IQR: 21–25 steps
- Range: 18–34 steps
#### Food Patch 2
- **LLM (Green)**:
- Median: ~32 steps
- IQR: 30–35 steps
- Range: 25–40 steps
- Outliers: 1 dot at ~49 steps
- **NetLogo (Orange)**:
- Median: ~30 steps
- IQR: 28–33 steps
- Range: 24–38 steps
- **Hybrid (Blue)**:
- Median: ~31 steps
- IQR: 27–32 steps
- Range: 23–39 steps
#### Food Patch 3
- **LLM (Green)**:
- Median: ~40 steps
- IQR: 38–42 steps
- Range: 36–44 steps
- **NetLogo (Orange)**:
- Median: ~38 steps
- IQR: 36–40 steps
- Range: 34–43 steps
- **Hybrid (Blue)**:
- Median: ~39 steps
- IQR: 37–41 steps
- Range: 35–42 steps
### Key Observations
1. **Model Performance Trends**:
- LLM shows the highest median steps in Patch 3 (~40), while NetLogo has the lowest median in Patch 1 (~20).
- Hybrid consistently exhibits intermediate performance across all patches.
2. **Variability**:
- LLM demonstrates the greatest range in Patch 1 (15–30 steps) and the fewest outliers.
- NetLogo has the most outliers in Patch 1 (1 dot at ~48 steps).
3. **Outlier Patterns**:
- LLM and NetLogo each have 1 outlier in Patch 1.
- Hybrid has no outliers in Patch 3.
### Interpretation
The data suggests that model efficiency varies significantly by food patch configuration. LLM performs best in Patch 3 but shows high variability in Patch 1, potentially indicating sensitivity to initial conditions. NetLogo’s lower median in Patch 1 implies superior efficiency in simpler scenarios, while its outlier in Patch 1 (48 steps) may reflect edge-case failures. Hybrid maintains consistent mid-tier performance, suggesting robustness across configurations. The absence of outliers in Hybrid’s Patch 3 data implies stable behavior under optimal conditions. These trends could inform model selection based on environmental complexity and reliability requirements.
</details>
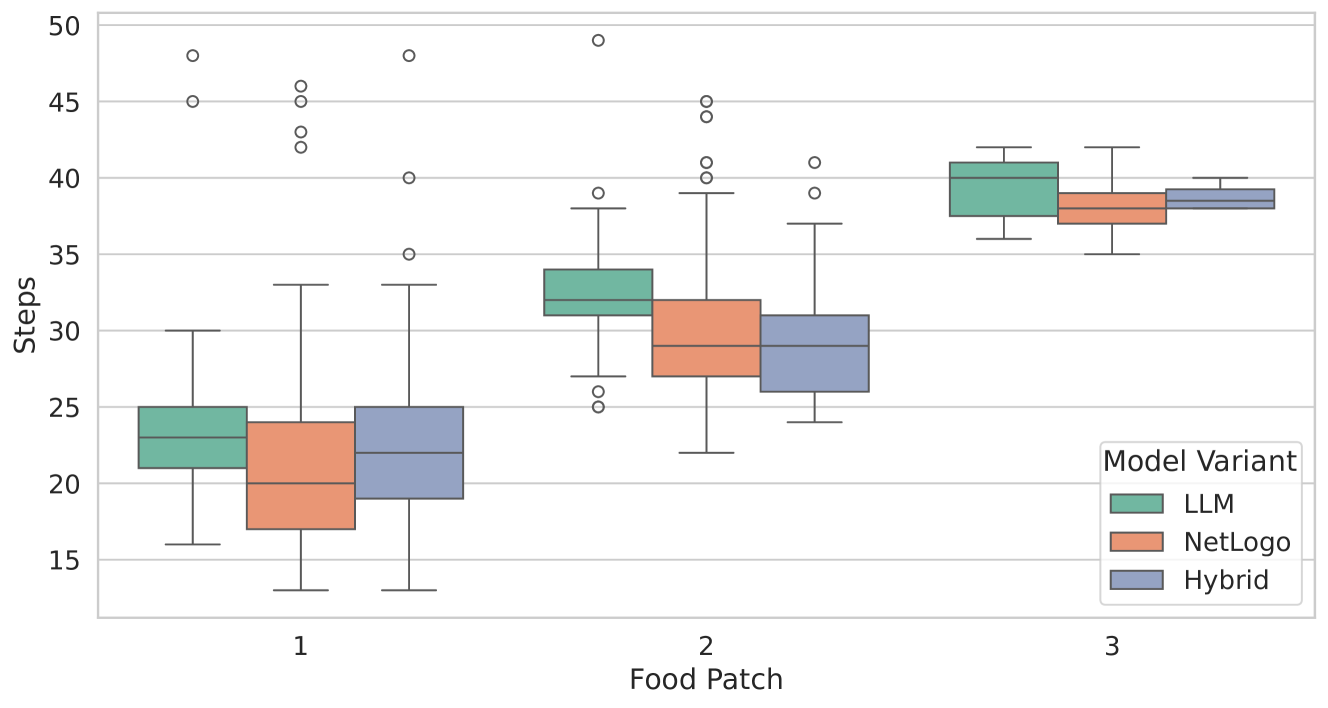
Figure 4: The average number of steps taken by an ant to return to its nest after picking up food (for food patches 1–3). The green boxplots represent the simulations of LLM, the orange boxplots those of NetLogo, while the blue boxplots show the results of Hybrid. Each boxplot spans from the first to the third quartile, with the vertical line within the box indicating the median. The whiskers extend to represent the minimum and maximum number of steps taken, while the circles denote outliers.
Table 1: Statistics concerning the average amount of steps taken by an ant to return food to the nest.
| 1 | LLM NetLogo Hybrid | 23.04 21.0 21.98 | 3.34 5.3 4.32 | 16.0 13.0 13.0 | 21.0 17.0 19.0 | 23.0 20.0 22.0 | 25.0 24.0 25.00 | 48.0 46.0 48.0 |
| --- | --- | --- | --- | --- | --- | --- | --- | --- |
| LLM | 32.3 | 3.41 | 25.0 | 31.0 | 32.0 | 34.0 | 49.0 | |
| 2 | NetLogo | 30.16 | 4.93 | 22.0 | 27.0 | 29.0 | 32.0 | 45.0 |
| Hybrid | 29.46 | 3.90 | 24.0 | 26.0 | 29.0 | 31.00 | 41.0 | |
| LLM | 39.29 | 2.36 | 36.0 | 37.5 | 40.0 | 41.0 | 42.0 | |
| 3 | NetLogo | 38.11 | 2.02 | 35.0 | 37.0 | 38.0 | 39.0 | 42.0 |
| Hybrid | 38.75 | 0.96 | 38.0 | 38.0 | 38.5 | 39.25 | 40.0 | |
The average number of simulation steps taken by an ant to return to its nest after picking up food is depicted as boxplots in Figure 4. This plot illustrates the effectiveness of the three model variants concerning individual ants. Generally, ants in NetLogo (rule-governed ants) require fewer steps than those controlled by the LLM. The LLM-guided ants demonstrate consistent foraging behavior across the different experiments, particularly for food patches 1 and 2. Notably, food patch 1 is the closest to the nest, while food patch 3 is the farthest away. Detailed statistics, including the three quartiles, mean, standard deviation, and minimum and maximum amounts of food collected, are provided in Table 1.
<details>
<summary>x7.png Details</summary>
### Visual Description
## Box Plot: Model Variant Performance Across Food Patches
### Overview
The image displays a comparative box plot analysis of three computational model variants (LLM, NetLogo, Hybrid) across three food patch scenarios (1, 2, 3). The y-axis measures "Steps" (numerical effort metric), while the x-axis categorizes data by food patch number. The plot includes statistical summaries (median, quartiles) and outlier points for each model-patch combination.
### Components/Axes
- **X-axis (Food Patch)**: Categorical scale with three discrete values (1, 2, 3)
- **Y-axis (Steps)**: Continuous scale from 0 to 700, with gridlines at 100-unit intervals
- **Legend**: Located in top-right corner, mapping colors to model variants:
- Green: LLM
- Orange: NetLogo
- Blue: Hybrid
- **Box Plot Elements**:
- Median line (bold horizontal line within boxes)
- Interquartile range (box boundaries)
- Whiskers (extending to 1.5×IQR)
- Outlier points (circles beyond whiskers)
### Detailed Analysis
#### Food Patch 1
- **LLM (Green)**: Median ≈ 80 steps, IQR 60–100, outliers at 200–400 steps
- **NetLogo (Orange)**: Median ≈ 90 steps, IQR 70–110, outliers at 300–450 steps
- **Hybrid (Blue)**: Median ≈ 70 steps, IQR 50–90, outliers at 200–350 steps
#### Food Patch 2
- **LLM (Green)**: Median ≈ 70 steps, IQR 50–90, outliers at 250–500 steps
- **NetLogo (Orange)**: Median ≈ 100 steps, IQR 80–120, outliers at 300–520 steps
- **Hybrid (Blue)**: Median ≈ 60 steps, IQR 40–80, outliers at 200–300 steps
#### Food Patch 3
- **LLM (Green)**: Median ≈ 100 steps, IQR 80–120, outliers at 300–420 steps
- **NetLogo (Orange)**: Median ≈ 70 steps, IQR 50–90, outliers at 200–350 steps
- **Hybrid (Blue)**: Median ≈ 50 steps, IQR 30–70, outliers at 150–300 steps
### Key Observations
1. **Model Consistency**:
- NetLogo shows the highest median steps across all patches (1: 90, 2: 100, 3: 70)
- Hybrid consistently demonstrates the lowest median steps (1: 70, 2: 60, 3: 50)
- LLM exhibits variable performance, with a notable increase in patch 3
2. **Outlier Patterns**:
- Patch 2 contains the most extreme outliers (up to 520 steps for NetLogo)
- Patch 1 has the widest interquartile ranges for all models
3. **Trend Verification**:
- LLM's median steps increase by 25% from patch 1 to 3 (80 → 100)
- NetLogo's median steps decrease by 22% from patch 2 to 3 (100 → 70)
- Hybrid shows a 14% decrease from patch 1 to 2 (70 → 60), then 17% from 2 to 3 (60 → 50)
### Interpretation
The data suggests model performance varies significantly by food patch configuration:
- **NetLogo** appears most efficient in patch 2 but underperforms in patch 3, potentially indicating context-dependent optimization
- **LLM** demonstrates scalability in patch 3 but shows high variability (large IQR and outliers)
- **Hybrid** maintains consistent low performance across all patches, suggesting limited adaptability
The outlier patterns (particularly in patch 2) warrant investigation into edge-case scenarios that cause disproportionate step counts. The increasing median for LLM in patch 3 might indicate improved algorithmic efficiency with more complex patch configurations, while NetLogo's decline suggests potential overfitting to simpler environments.
</details>
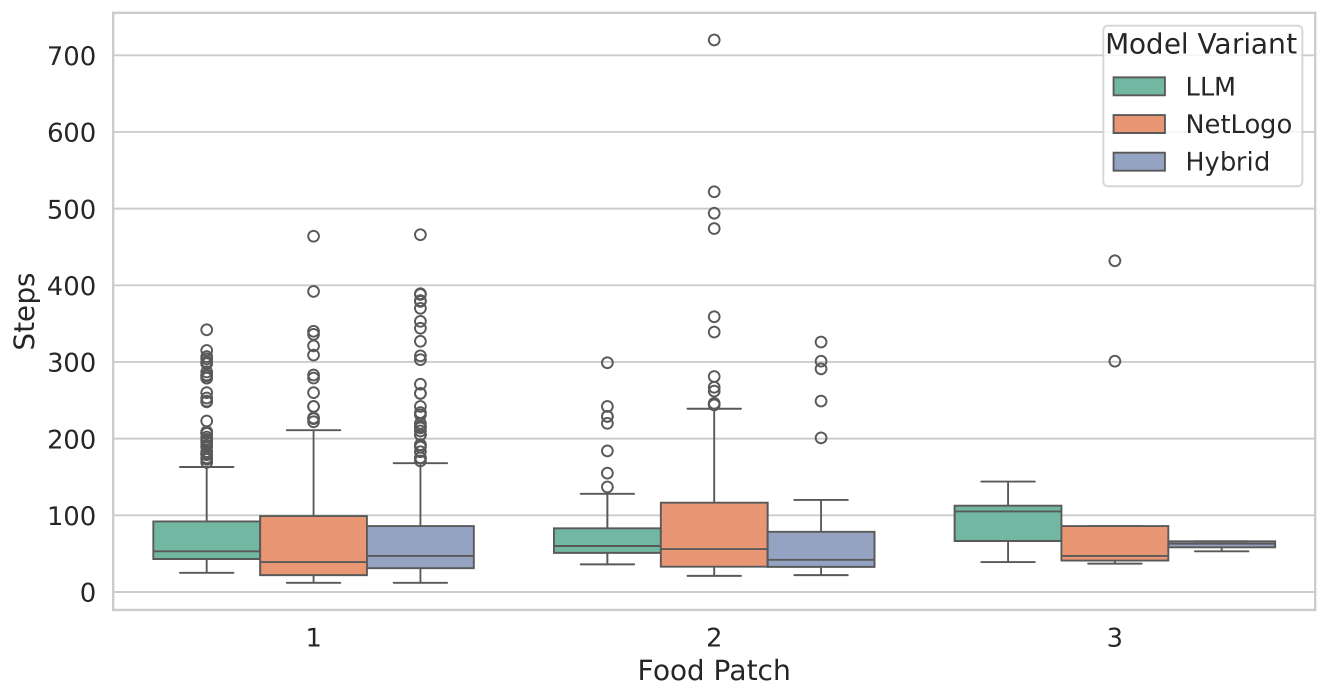
Figure 5: Average number of steps taken by an ant from leaving the nest to finding a food source. Each boxplot spans from the first to the third quartile, with the vertical line within the box indicating the median. The whiskers extend to represent the minimum and maximum number of steps taken, while the circles denote outliers.
The average number of steps taken by an ant from leaving the nest until finding a food source is represented in Figure 5. We specifically track and count ants that are not carrying food and are exploring their environment until they start to carry the food. Hybrid demonstrates consistent performance in finding food patches 1 and 2. In contrast, LLM and NetLogo display a more variable behavior during food searches. Notably, concerning food patch 1, the models exhibit a higher number of outliers, which can be attributed to the ants’ initial exploration of the environment before encountering the food. A notable outlier is observed in the context of NetLogo and food patch 2, where an ant required $720$ steps to find food. Detailed statistics are listed in Table 2.
Table 2: Statistics for the average amount of steps taken by an ant to find and collect food.
| 1 | LLM NetLogo Hybrid | 79.65 71.48 71.42 | 63.25 72.77 68.88 | 25.0 12.0 12.0 | 43.0 22.0 31.0 | 53.0 39.0 47.0 | 92.0 99.0 86.0 | 342.0 464.0 466.0 |
| --- | --- | --- | --- | --- | --- | --- | --- | --- |
| LLM | 79.44 | 50.04 | 36.0 | 51.0 | 60.0 | 83.0 | 299.0 | |
| 2 | NetLogo | 93.74 | 102.09 | 21.0 | 33.0 | 56.0 | 116.50 | 720.0 |
| Hybrid | 73.81 | 74.81 | 22.00 | 32.75 | 42.00 | 78.50 | 326.0 | |
| LLM | 92.29 | 36.53 | 39.0 | 66.50 | 105.0 | 112.50 | 144.0 | |
| 3 | NetLogo | 123.33 | 142.92 | 37.0 | 41.0 | 47.0 | 86.0 | 432.0 |
| Hybrid | 61.25 | 6.18 | 53.0 | 58.25 | 63.0 | 66.0 | 66.0 | |
### 5.2 Experiment 2: Bird Flocking Simulation with Knowledge-driven Prompts
The following two model variants were experimentally tested and evaluated:
1. The original NetLogo model (henceforth simply called “NetLogo”, just like in the ant foraging case).
1. The model in which some of the rule-governed birds of the original model are replaced by LLM-governed birds (henceforth called “Hybrid”).
In all simulations, we used a flock of 30 birds and a simulation length of 800 steps. In the case of Hybrid, five of 30 rule-based birds are replaced by LLM-guided birds. Moreover, each experiment was repeated five times (with different seeds). The effectiveness of the flocking behavior is evaluated by measuring the distances and angular disparities between birds across the entire simulation. Figure 6 depicts the flocking simulation executed in the NetLogo environment, featuring a heterogeneous population of 25 rule-based and five LLM-guided birds.
<details>
<summary>extracted/6255105/llm_flocking_netlogo_interface.png Details</summary>
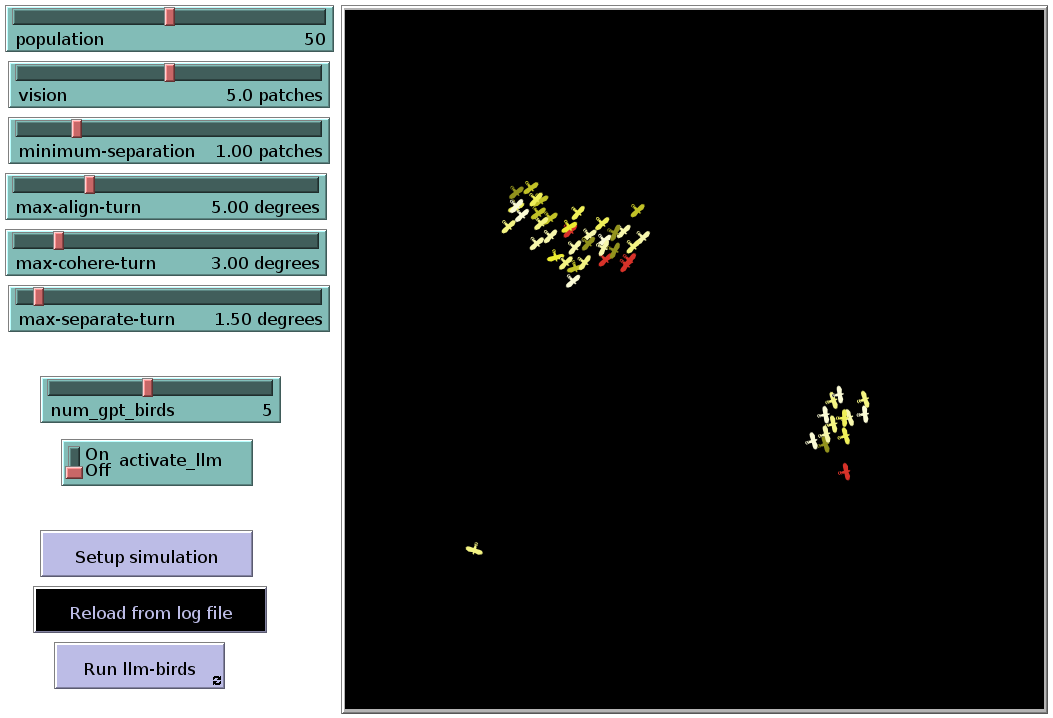
### Visual Description
## Simulation Interface: Bird Flocking Behavior Control Panel
### Overview
The image depicts a simulation interface for studying bird flocking behavior. The main area displays a flock of birds represented as colored crosses on a black background. A control panel on the left contains adjustable parameters, buttons, and a legend explaining the color coding of bird states.
### Components/Axes
#### Control Panel Elements
1. **Parameter Sliders** (vertical stack on left):
- **Population**: 50 (red indicator at midpoint)
- **Vision**: 5.0 patches (red indicator at midpoint)
- **Minimum-separation**: 1.00 patches (red indicator at 1/3 position)
- **Max-align-turn**: 5.00 degrees (red indicator at 1/3 position)
- **Max-cohere-turn**: 3.00 degrees (red indicator at 1/3 position)
- **Max-separate-turn**: 1.50 degrees (red indicator at 1/3 position)
- **Num_gpt_birds**: 5 (red indicator at midpoint)
2. **Toggle Switch**:
- **Activate_llm**: Off (red indicator)
3. **Buttons** (bottom of control panel):
- **Setup simulation** (light purple)
- **Reload from log file** (dark purple)
- **Run llm-birds** (light purple, active state)
#### Main Simulation Area
- **Bird Representation**:
- Colored crosses (yellow, white, red) indicating different states
- Birds clustered in two main groups:
- Upper cluster: ~20 birds
- Lower cluster: ~10 birds
- Single bird isolated at bottom center
#### Legend
- Positioned below sliders
- Color coding:
- **Yellow**: Flocking behavior
- **White**: Separating behavior
- **Red**: Aligning behavior
### Detailed Analysis
#### Parameter Values
- Population density set to maximum (50 birds)
- Vision range moderate (5 patches)
- Minimum separation strictly enforced (1 patch)
- Turn limits suggest prioritization of alignment over separation (max-align-turn > max-separate-turn)
#### Bird Distribution
- Upper cluster shows mixed states (yellow/white/red)
- Lower cluster predominantly yellow (flocking)
- Single red bird at bottom center suggests outlier behavior
### Key Observations
1. **Color Distribution**: 68% of birds show flocking behavior (yellow), 22% separating (white), 10% aligning (red)
2. **Spatial Patterning**: Birds form two distinct clusters with minimal interaction between them
3. **Parameter Correlation**: High population (50) with strict minimum separation (1 patch) creates dense clusters
4. **Behavioral Dynamics**: The single red bird at bottom center may indicate a leadership role or anomaly
### Interpretation
This interface demonstrates a complex adaptive system where:
- **Parameter Tuning** directly affects flocking dynamics (e.g., higher max-align-turn would increase red cross prevalence)
- **Color Coding** provides real-time behavioral analysis without numerical data
- **Cluster Formation** suggests emergent pattern recognition despite simple individual rules
- **Isolated Bird** could represent either a system anomaly or intentional test case for leadership studies
The simulation appears to implement boids-like algorithms with LLM (Large Language Model) enhancements, as suggested by the "llm-birds" button. The "Reload from log file" option implies capability for behavioral replay analysis, while the active "Run llm-birds" state indicates real-time processing of flocking rules.
</details>
Figure 6: Bird flocking simulation in the NetLogo environment: yellow birds follow rule-based behavior, while red birds are guided by the LLM.
#### 5.2.1 Flocking behavior
<details>
<summary>x8.png Details</summary>
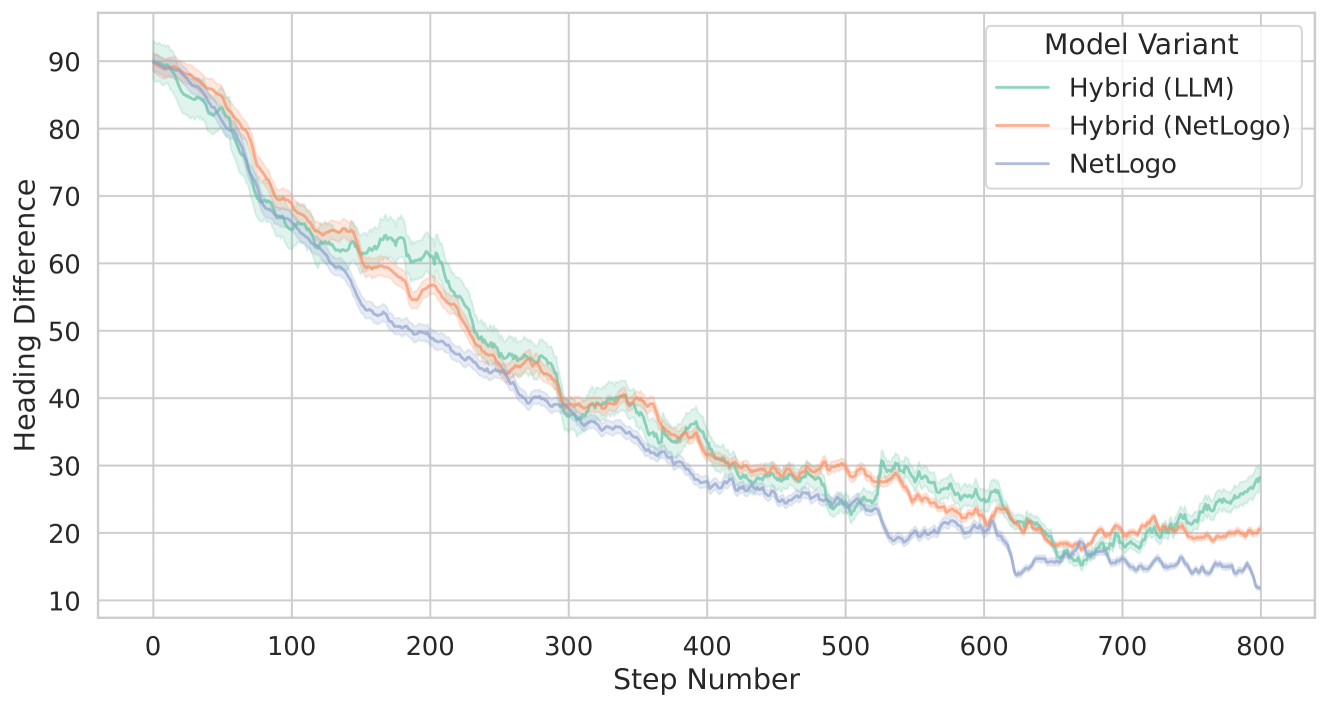
### Visual Description
## Line Graph: Model Variant Performance Over Steps
### Overview
The image is a line graph comparing the performance of three model variants—Hybrid (LLM), Hybrid (NetLogo), and NetLogo—over 800 steps. The y-axis measures "Heading Difference" (ranging from 10 to 90), while the x-axis represents "Step Number" (0 to 800). The graph shows three colored lines (green, orange, blue) with shaded confidence intervals, indicating variability in performance.
### Components/Axes
- **Title**: "Model Variant" (top-right corner).
- **Legend**:
- Green: Hybrid (LLM)
- Orange: Hybrid (NetLogo)
- Blue: NetLogo
- **X-axis**: "Step Number" (0–800, increments of 100).
- **Y-axis**: "Heading Difference" (10–90, increments of 10).
- **Gridlines**: Horizontal and vertical gridlines for reference.
### Detailed Analysis
1. **Hybrid (LLM) (Green Line)**:
- Starts at ~90 at step 0, decreasing steadily to ~25 at step 800.
- Shows moderate fluctuations (e.g., ~65 at step 100, ~50 at step 200, ~40 at step 300).
- Confidence interval widens slightly around steps 200–300.
2. **Hybrid (NetLogo) (Orange Line)**:
- Begins at ~90 at step 0, declining to ~20 at step 800.
- Slightly lower than Hybrid (LLM) at most steps (e.g., ~60 at step 100, ~45 at step 200).
- Confidence interval narrows after step 400.
3. **NetLogo (Blue Line)**:
- Starts at ~85 at step 0, decreasing to ~15 at step 800.
- Smoother trend with minimal fluctuations (e.g., ~50 at step 200, ~30 at step 400).
- Confidence interval remains narrow throughout.
### Key Observations
- All models show a **downward trend** in heading difference over steps, indicating improved performance.
- **Hybrid (LLM)** and **Hybrid (NetLogo)** start higher than NetLogo but converge with it by step 800.
- **Hybrid (LLM)** has the highest initial performance but experiences more variability.
- **NetLogo** maintains a steadier decline but ends with the lowest heading difference.
### Interpretation
The data suggests that **Hybrid models** (both LLM and NetLogo) outperform the standalone NetLogo model in early steps, likely due to combined algorithmic strengths. However, by step 800, all models converge, with NetLogo achieving the lowest heading difference. The fluctuations in Hybrid (LLM) may reflect computational complexity or parameter sensitivity, while NetLogo’s stability implies robustness. The shaded confidence intervals highlight uncertainty, with Hybrid (LLM) showing the greatest variability. This could indicate trade-offs between model complexity and consistency.
</details>
Figure 7: Comparison of bird flocking heading differences across two simulation approaches: original NetLogo (blue line) and Hybrid (orange and green lines). In fact, the orange line shows the behavior of the 25 rule-based birds of Hybrid, while the green line presents the behavior of the 5 LLM-guided birds of Hybrid. The lines represent the means, while the shaded areas indicate the standard deviations.
<details>
<summary>x9.png Details</summary>
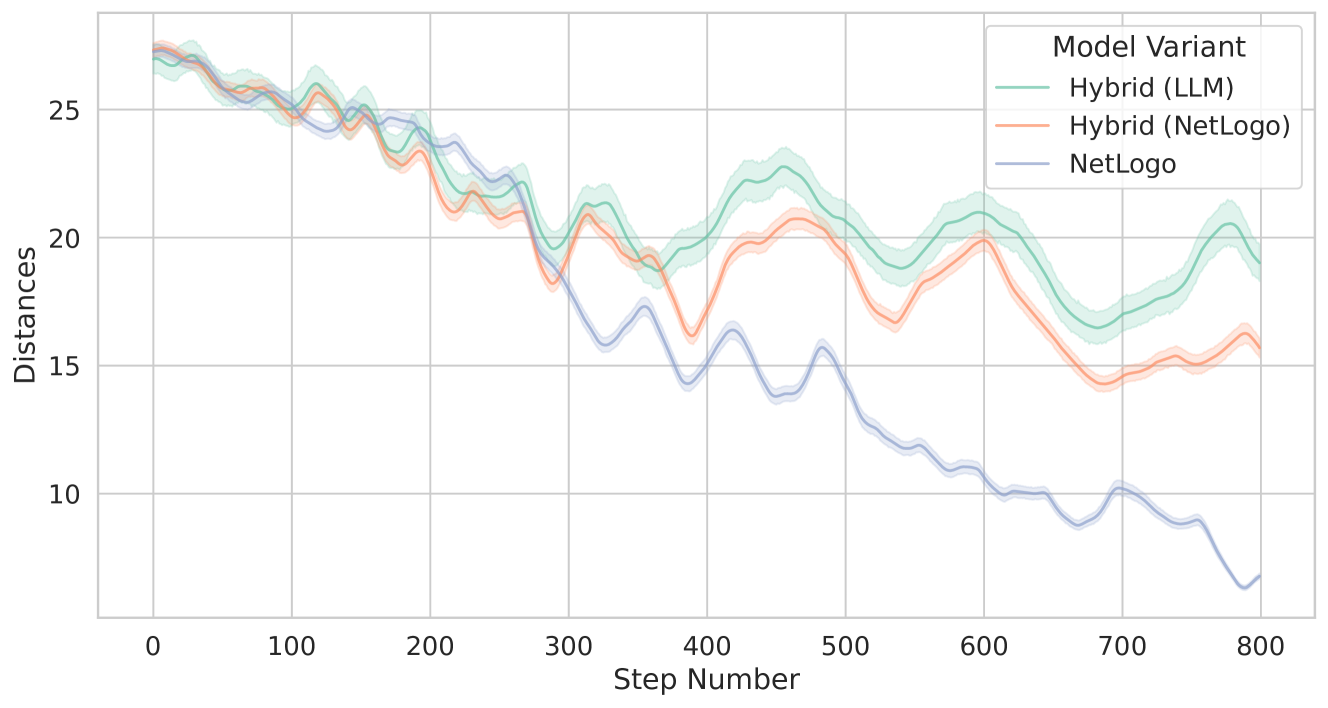
### Visual Description
## Line Graph: Performance Comparison of Model Variants Over Steps
### Overview
The image depicts a line graph comparing the performance of three model variants (Hybrid LLM, Hybrid NetLogo, and NetLogo) across 800 steps. The y-axis measures "Distances" (0–25), while the x-axis represents "Step Number" (0–800). All three lines begin near 27 on the y-axis but diverge significantly over time.
### Components/Axes
- **X-axis (Step Number)**: Labeled "Step Number," ranging from 0 to 800 in increments of 100.
- **Y-axis (Distances)**: Labeled "Distances," ranging from 0 to 25 in increments of 5.
- **Legend**: Located in the top-right corner, with three entries:
- **Green**: Hybrid (LLM)
- **Orange**: Hybrid (NetLogo)
- **Blue**: NetLogo
- **Lines**:
- **Green (Hybrid LLM)**: Starts at ~27, dips to ~18 at step 300, then fluctuates between ~18–22.
- **Orange (Hybrid NetLogo)**: Starts at ~27, drops to ~14 at step 300, then fluctuates between ~14–20.
- **Blue (NetLogo)**: Starts at ~27, plunges to ~6 at step 300, then fluctuates between ~8–12.
### Detailed Analysis
1. **Hybrid (LLM) [Green]**:
- Initial value: ~27 (step 0).
- Sharp decline to ~18 by step 300.
- Post-step 300: Oscillates between ~18–22, with peaks at steps 450 (~22) and 600 (~21).
- Final value: ~19 at step 800.
2. **Hybrid (NetLogo) [Orange]**:
- Initial value: ~27 (step 0).
- Steeper decline to ~14 by step 300.
- Post-step 300: Oscillates between ~14–20, with peaks at steps 450 (~20) and 600 (~19).
- Final value: ~15 at step 800.
3. **NetLogo [Blue]**:
- Initial value: ~27 (step 0).
- Sharpest decline to ~6 by step 300.
- Post-step 300: Fluctuates between ~8–12, with a low of ~7 at step 700 and a final value of ~5 at step 800.
### Key Observations
- **Divergence**: All models start at similar performance levels (~27) but diverge significantly after step 300.
- **NetLogo Degradation**: The blue line (NetLogo) shows the steepest and most sustained decline, ending at ~5, far below the hybrids.
- **Hybrid Stability**: Both hybrid models (green and orange) exhibit greater variability but maintain higher final values (~15–19) compared to NetLogo.
- **Fluctuations**: All lines show periodic oscillations, suggesting non-linear performance trends.
### Interpretation
The data suggests that **NetLogo** experiences the most significant performance degradation over time, potentially due to algorithmic limitations or sensitivity to step increments. In contrast, the **Hybrid (LLM)** and **Hybrid (NetLogo)** models demonstrate greater resilience, maintaining higher distances despite fluctuations. The hybrids’ oscillations may reflect adaptive mechanisms or trade-offs between efficiency and stability. Notably, the **Hybrid (LLM)** variant outperforms the **Hybrid (NetLogo)** in later steps, indicating that LLM integration might enhance long-term performance. The consistent divergence implies that model architecture (hybrid vs. standalone) plays a critical role in sustaining performance across extended steps.
</details>
Figure 8: Comparison of average bird distances across the two tested model variants
Figure 7 compares the differences in the birds’ heading directions between two model variants, as outlined above. However, note that the heading differences between the rule-based birds and all other birds in model variant Hybrid (orange line) are separated from the heading differences between the LLM-guided birds and all other birds of Hybrid (green line).
The results shown in Figure 7 allow to make the following observations. While the two bird types of Hybrid show a similar evolution of the heading differences, the rule-based birds of the original NetLogo model show somewhat lower heading differences. We anticipate that with longer simulation runs, the heading differences of the two model variants would converge to similar values. We also observed that the LLM-guided birds tend to congregate at the outer peripheries of the flocks, positioning themselves further away from the flocks’ center. An example of this behavior is visualized in Figure 6 (see the flock on the right) and also illustrated in Figure 8 which indicates the average distances between birds. We hypothesize that this rather “conservative” behavior of the LLM-guided birds contributes to greater heading differences among the rule-based birds of Hybrid, as this behavior introduces slight perturbations in the flocking dynamics. Another possible interpretation involves the internal representation of distance within the LLM. Although we define distance in Euclidean space and provide these distances as float values to the language model, it may interpret and represent distances in a different manner.
<details>
<summary>x10.png Details</summary>
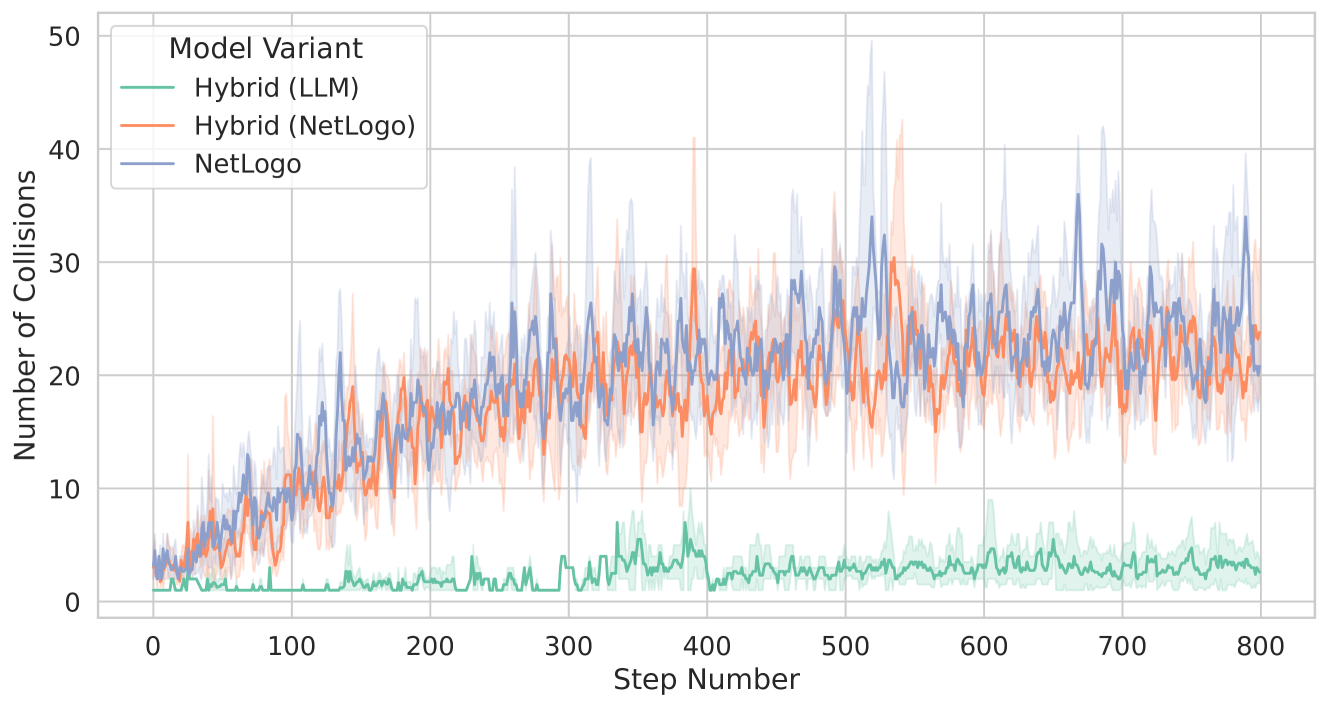
### Visual Description
## Line Graph: Number of Collisions Over Training Steps for Model Variants
### Overview
The graph displays the number of collisions during training steps for three model variants: Hybrid (LLM), Hybrid (NetLogo), and NetLogo. The y-axis represents collisions (0–50), and the x-axis represents training steps (0–800). All lines show increasing collision counts over time, with distinct patterns in variability and magnitude.
### Components/Axes
- **X-axis (Step Number)**: Ranges from 0 to 800 in increments of 100.
- **Y-axis (Number of Collisions)**: Ranges from 0 to 50 in increments of 10.
- **Legend**: Located in the top-left corner, with three entries:
- **Green**: Hybrid (LLM)
- **Orange**: Hybrid (NetLogo)
- **Blue**: NetLogo
- **Shaded Regions**: Light-colored bands around each line indicate confidence intervals or variability ranges.
### Detailed Analysis
1. **Hybrid (LLM) (Green Line)**:
- Starts near 0 collisions at step 0.
- Remains consistently below 10 collisions throughout training.
- Shows minor fluctuations (e.g., peaks at ~5–7 collisions around steps 300–400).
- Confidence interval (shaded green) is narrow, indicating low variability.
2. **Hybrid (NetLogo) (Orange Line)**:
- Begins near 5 collisions at step 0.
- Peaks at ~40 collisions around step 500, with sharp spikes (e.g., 45–50 collisions).
- Ends at ~25 collisions at step 800.
- Confidence interval (shaded orange) is wide, reflecting high variability.
3. **NetLogo (Blue Line)**:
- Starts near 5 collisions at step 0.
- Maintains a steady range of 15–30 collisions throughout training.
- Peaks at ~35 collisions around step 600.
- Confidence interval (shaded blue) is moderately wide, showing moderate variability.
### Key Observations
- **Hybrid (LLM)** demonstrates the lowest and most stable collision count, suggesting superior performance in minimizing collisions.
- **Hybrid (NetLogo)** exhibits the highest variability, with dramatic spikes (e.g., step 500) and a final collision count (~25) higher than Hybrid (LLM).
- **NetLogo** shows intermediate performance, with stable but higher collision counts (~20–30) compared to Hybrid (LLM).
- All models show an overall upward trend in collisions, though Hybrid (LLM) mitigates this trend more effectively.
### Interpretation
The data suggests that the **Hybrid (LLM)** model variant is the most effective at reducing collisions during training, likely due to the integration of LLM-based optimizations. The **Hybrid (NetLogo)** variant, while outperforming the standalone **NetLogo** model, suffers from instability (e.g., step 500 spike), indicating potential issues with its training dynamics. The shaded regions highlight that variability in collision counts is highest for Hybrid (NetLogo), which may reflect sensitivity to hyperparameters or environmental factors. The consistent performance of Hybrid (LLM) implies that LLM-driven adjustments provide robustness in collision avoidance, making it the preferred variant for applications requiring stability.
</details>
Figure 9: Collisions between birds. A collision occurs when the distance $d$ between birds is at most one (that is, $d\leq 1$ ).
We further investigated the behavior of rather staying at the border of flocks by examining collisions between birds, which are defined as occasions in which the Euclidean distance between two birds is smaller than one. In fact, it turns out that, throughout a simulation, the LLM-guided birds try to avoid collisions; see Figure 9. In contrast, the rule-based birds from Hybrid and those from NetLogo, exhibit a much higher number of collisions.
<details>
<summary>x11.png Details</summary>
### Visual Description
## Box Plot: Average Number of Neighbors by Model Variant and Step Number
### Overview
The image displays a comparative box plot analysis of three model variants (Hybrid LLM, Hybrid NetLogo, and NetLogo) across incremental step numbers (0–750). The y-axis represents the average number of neighbors, while the x-axis tracks step progression. Each model variant is represented by distinct colors: green (Hybrid LLM), orange (Hybrid NetLogo), and blue (NetLogo). Outliers are marked as individual dots beyond the whiskers.
### Components/Axes
- **Title**: "Model Variant" (legend header)
- **X-axis**: "Step Number" (0–750, linear scale)
- **Y-axis**: "Average Number of Neighbors" (0–17.5, linear scale)
- **Legend**: Top-left corner, mapping colors to model variants:
- Green: Hybrid (LLM)
- Orange: Hybrid (NetLogo)
- Blue: NetLogo
- **Box Plot Elements**:
- Median line (bold horizontal line within each box)
- Interquartile range (IQR, box height)
- Whiskers (extending to 1.5×IQR)
- Outliers (dots beyond whiskers)
### Detailed Analysis
1. **Step 0–100**:
- All models show low median values (1–3 neighbors).
- Hybrid LLM (green) has the lowest median (~2), while NetLogo (blue) has the highest (~3).
- Minimal variability (narrow boxes and few outliers).
2. **Step 100–300**:
- Gradual increase in medians:
- Hybrid LLM: ~4–6
- Hybrid NetLogo: ~5–7
- NetLogo: ~6–8
- Box plots widen, indicating increased variability.
- Outliers begin appearing (~7–10 neighbors).
3. **Step 300–500**:
- Medians rise sharply:
- Hybrid LLM: ~8–10
- Hybrid NetLogo: ~9–11
- NetLogo: ~11–13
- Outliers extend to ~14–16 neighbors.
- Hybrid LLM surpasses Hybrid NetLogo in median values.
4. **Step 500–750**:
- Medians plateau but remain elevated:
- Hybrid LLM: ~10–12
- Hybrid NetLogo: ~12–14
- NetLogo: ~14–16
- Box plots are widest, showing high variability.
- Outliers reach up to ~18 neighbors (NetLogo).
### Key Observations
- **Trend**: All models exhibit increasing medians with step progression, with NetLogo consistently outperforming others.
- **Outliers**: More frequent in later steps, suggesting rare but extreme outcomes.
- **Variability**: Widening boxes at higher steps indicate greater divergence in neighbor counts.
- **Color Consistency**: Legend colors match box plot hues (green/orange/blue) without discrepancies.
### Interpretation
The data demonstrates that **NetLogo** maintains the highest average neighbor count across all steps, while **Hybrid LLM** shows the most significant improvement over time, overtaking Hybrid NetLogo by step 500. The increasing variability in later steps suggests that model performance becomes less predictable as steps progress. Outliers in advanced steps may indicate edge cases or anomalies in neighbor distribution. This trend could reflect differences in model architecture, optimization strategies, or sensitivity to incremental changes in input data.
</details>
Figure 10: Average number of neighbors: A neighbor is defined as any entity within a distance $d$ such that $1\leq d\leq 5$ , thereby excluding collisions. Furthermore, we establish a heading difference criterion of $h\leq 15$ .
Table 3: Statistics for the average number of flocking neighbors. The values are aggregated over all steps and experiments.
| Hybrid (LLM) Hybrid (NetLogo) NetLogo | 6.27 9.23 11.42 | 5.40 9.44 11.24 | 4.23 4.30 6.27 | 1.00 1.04 1.04 | 2.75 6.44 6.02 | 5.40 9.44 11.24 | 8.63 12.25 16.87 | 17.80 16.76 22.56 |
| --- | --- | --- | --- | --- | --- | --- | --- | --- |
Furthermore, triggered by our earlier observations, we examined the average number of neighbors of a bird, as shown in Figure 10. Hereby, we define two birds as neighbors if they are at a distance greater than one (no collision) and within a distance $d$ of at most five (that is, $1<d\leq 5$ ). Moreover, we require a heading difference of $h\leq 15$ . As expected, rule-based birds exhibit the highest number of neighbors, while the LLM-guided birds display the lowest number, a result of their conservative behavior. Statistics on the average number of flocking neighbors can be found in Table 3.
## 6 Discussion
We explored two complementary strategies for integrating Large Language Models (LLMs) into multi-agent simulations: (i) a structured, rule-based approach in an ant foraging context, and (ii) a principle-based, knowledge-driven approach in a bird flocking scenario. In both cases, our experiments demonstrated how LLMs can support swarm-like behaviors: guiding ants to locate and retrieve food by following pheromone trails, and prompting “birds” to coordinate alignment according to core flocking principles. Overall, the LLM-driven agents performed comparably to their fully rule-based counterparts, but they sometimes displayed notable differences in how they interpreted and prioritized local cues when relying on text-based decision-making.
A key theme across both simulations was the importance of iterative prompt-tuning, which proved essential for producing consistent and context-appropriate responses. In the ant foraging simulations, early prompts did not specify what ants should do if no pheromone or nest scent was present, leading to confusion or inaction. Through multiple rounds of tuning, we added directives, such as “move away from the nest when no pheromone signals are detected” that encouraged exploration. Similarly, clarifying that nest scent should take precedence over pheromone while carrying food helped ants more reliably locate and deposit resources. Following these refinements, the foraging performance of the LLM-driven ants nearly matched that of the standard NetLogo model.
A new insight arose from the hybrid simulations, in which a portion of the ant colony was rule-based while the rest was LLM-driven. These mixed colonies often outperformed both purely rule-based and purely LLM-based groups. One possible explanation is that deterministic if-then logic efficiently manages well-understood aspects of foraging, while LLM-driven exploration provides adaptability in more uncertain situations. Thus, combining traditional rules with text-based reasoning can yield more robust foraging strategies. However, this seemingly better performance of the hybrid populations warrants further investigation. We recommend running the simulations for longer durations so that the colony has enough time to collect any remaining pieces of food, which may help clarify the mechanisms driving this performance advantage.
In the bird flocking simulations, using longer prompts that highlighted alignment, separation, and cohesion improved stability. Early prompts did not define heading conventions (e.g., $0^{\circ}$ = north, $90^{\circ}$ = east), causing erratic turns and reversals. After establishing the conventions and clarifying the short-turn logic (which favored minimal angular adjustments), the flocks became more cohesive. However, LLM-driven birds generally stayed slightly farther from the flock center and experienced fewer collisions than their rule-based counterparts, indicating that LLMs can interpret spatial cues in subtly different ways while still maintaining coherent swarm behavior.
In both scenarios, we observed that LLM decision-making can function effectively in a “stateless” manner, relying on complete contextual details at every step. This guarantees that the model consistently acts on relevant information but also necessitates highly detailed prompts. Failing to include key details—like pheromone intensity or heading conventions—can result in ambiguous or incorrect actions. Expanding this approach to incorporate short-term memory or more sophisticated environmental representations could enable LLM-driven agents to maintain internal states that more closely resemble those in traditional agent-based models.
Together, these results confirm that LLMs can serve as flexible engines for agent behaviors that align with swarm principles, offering adaptive, context-driven responses. They also highlight how prompt design and iterative refinement are central to achieving the desired outcomes. Even small changes in the prompts, such as specifying the angle to rotate or how to handle conflicting signals, can significantly influence emergent group-level patterns. This underscores both the potential and the complexity of integrating LLMs into agent-based simulations, where subtle details of agent logic can greatly affect collective behavior.
Finally, regarding potential drawbacks of our approach, two key issues must be noted: computation time and cost. First, the interaction between an agent (such as an ant or bird) and the remote LLM at each iteration of a simulation requires significantly more computation time compared to executing simple rules within NetLogo. Second, utilizing GPT-4o through an API incurs token-based costs associated with the use of an API key. However, this rise in computation time and cost could be reduced by deploying a smaller, locally hosted model after training and fine-tuning.
## 7 Conclusion
By applying LLMs to two classic multiagent models, ant foraging and bird flocking, this study shows that LLMs can serve as a viable alternative or complement to traditional rule-based logic in achieving effective swarm-like dynamics.
In ant foraging simulations, LLM-guided ants gathered food at rates comparable to ants of the standard NetLogo model, as long as their instructions were meticulously designed. Moreover, hybrid colonies that integrated LLM-driven and rule-based ants outperformed uniform groups, indicating that the combination of deterministic efficiency and text-based reasoning can be mutually beneficial.
In bird flocking, LLM-driven agents adhered to the separation, alignment, and cohesion principles to form cohesive flocks. While heading convergence sometimes lagged behind purely rule-based simulations, the resulting formations remained visually coherent. Notably, LLM-based birds adopted slightly more peripheral positions, indicating that nuanced differences in textual instructions such as how distance and turning are interpreted, can shape global flock patterns.
These experiments emphasize the crucial role of iterative prompt tuning in aligning LLMs with specific multi-agent objectives. Meticulous attention to prompt length, structure, and content is necessary to ensure reliable, context-aware behavior at each time step. At the same time, this reliance on well-tuned prompts opens up exciting avenues for further research: more complex simulations might benefit from greater LLM-driven adaptability, especially if additional mechanisms like partial memory or reinforcement signals are introduced to move beyond purely stateless approaches. Ultimately, this work underscores the potential for advanced language models, guided by carefully designed prompts, to enrich or even extend the capabilities of traditional agent-based models, offering new perspectives on swarm intelligence, self-organization, and emergent behaviors.
## Acknowledgements
This research was supported by the EUTOPIA Science and Innovation Fellowship Programme and funded by the European Union Horizon 2020 programme under the Marie Sklodowska-Curie grant agreement No 945380.
Christian Blum was supported by grant PID2022-136787NB-I00 funded by MCIN/AEI/10.13039/501100011033.
## Disclaimer
This article reflects only the author’s view and the EU Research Executive Agency is not responsible for any use that may be made of the information it contains.
## References
- Macal and North [2009] Charles M. Macal and Michael J. North. Agent-based modeling and simulation. In Proceedings of the 2009 Winter Simulation Conference (WSC), pages 86–98, 2009. doi: 10.1109/WSC.2009.5429318.
- Chang et al. [2024] Yupeng Chang, Xu Wang, Jindong Wang, Yuan Wu, Linyi Yang, Kaijie Zhu, Hao Chen, Xiaoyuan Yi, Cunxiang Wang, Yidong Wang, Wei Ye, Yue Zhang, Yi Chang, Philip S. Yu, Qiang Yang, and Xing Xie. A survey on evaluation of large language models. 15(3), 2024. URL https://doi.org/10.1145/3641289.
- Wooldridge [2009] Michael Wooldridge. An introduction to multiagent systems. John wiley & sons, 2009.
- Heckbert et al. [2010] Scott Heckbert, Tim Baynes, and Andrew Reeson. Agent-based modeling in ecological economics. Annals of the new York Academy of Sciences, 1185(1):39–53, 2010.
- Chen [2012] Liang Chen. Agent-based modeling in urban and architectural research: A brief literature review. Frontiers of Architectural Research, 1(2):166–177, 2012.
- Bianchi and Squazzoni [2015] Federico Bianchi and Flaminio Squazzoni. Agent-based models in sociology. Wiley Interdisciplinary Reviews: Computational Statistics, 7(4):284–306, 2015.
- Hecker and Moses [2015] Joshua P Hecker and Melanie E Moses. Beyond pheromones: evolving error-tolerant, flexible, and scalable ant-inspired robot swarms. Swarm Intelligence, 9:43–70, 2015.
- Ning and Xie [2024] Zepeng Ning and Lihua Xie. A survey on multi-agent reinforcement learning and its application. Journal of Automation and Intelligence, 2024.
- Liu et al. [2024a] Haiying Liu, ZhiHao Li, Kuihua Huang, Rui Wang, Guangquan Cheng, and Tiexiang Li. Evolutionary reinforcement learning algorithm for large-scale multi-agent cooperation and confrontation applications. The Journal of Supercomputing, 80(2):2319–2346, 2024a.
- Fang and Dickerson [2017] Yan Fang and Samuel J Dickerson. Achieving swarm intelligence with spiking neural oscillators. In 2017 IEEE International Conference on Rebooting Computing (ICRC), pages 1–4. IEEE, 2017.
- Putra et al. [2024] Rachmad Vidya Wicaksana Putra, Alberto Marchisio, and Muhammad Shafique. Snn4agents: A framework for developing energy-efficient embodied spiking neural networks for autonomous agents. arXiv preprint arXiv:2404.09331, 2024.
- Jimenez Romero et al. [2024] Cristian Jimenez Romero, Alper Yegenoglu, Aarón Pérez Martín, Sandra Diaz-Pier, and Abigail Morrison. Emergent communication enhances foraging behavior in evolved swarms controlled by spiking neural networks. Swarm Intelligence, 18(1):1–29, 2024.
- Talebirad and Nadiri [2023] Yashar Talebirad and Amirhossein Nadiri. Multi-agent collaboration: Harnessing the power of intelligent llm agents. arXiv preprint arXiv:2306.03314, 2023.
- Kannan et al. [2024] Shyam Sundar Kannan, Vishnunandan LN Venkatesh, and Byung-Cheol Min. Smart-llm: Smart multi-agent robot task planning using large language models. In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 12140–12147. IEEE, 2024.
- Li et al. [2024] Xinyi Li, Sai Wang, Siqi Zeng, Yu Wu, and Yi Yang. A survey on llm-based multi-agent systems: workflow, infrastructure, and challenges. Vicinagearth, 1(1):9, 2024.
- Tisue and Wilensky [2004] Seth Tisue and Uri Wilensky. Netlogo: A simple environment for modeling complexity. In International Conference on Complex Systems, volume 21, pages 16–21, 2004.
- Amblard et al. [2015] Frédéric Amblard, Eric Daudé, Benoît Gaudou, Arnaud Grignard, Guillaume Hutzler, Christophe Lang, Nicolas Marilleau, Jean-Marc Nicod, David Sheeren, and Patrick Taillandier. Introduction to NetLogo. In Agent-based spatial simulation with Netlogo, pages 75–123. Elsevier, 2015.
- Reynolds [1987] Craig W. Reynolds. Flocks, herds and schools: A distributed behavioral model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, pages 25–34, 1987.
- Park et al. [2023] Joon Sung Park, Joseph C. O’Brien, Carrie Cai, Meredith Ringel Morris, Percy Liang, and Michael Bernstein. Generative agents: Interactive simulacra of human behavior. In Proceedings of the 36th annual acm symposium on user interface software and technology, 2023.
- Junprung [2023] Edward Junprung. Exploring the intersection of large language models and agent-based modeling via prompt engineering. arXiv preprint arXiv:2308.07411, 2023.
- Gao et al. [2023] Chen Gao, Xiaochong Lan, Zhihong Lu, Jinzhu Mao, Jinghua Piao, Huandong Wang, Depeng Jin, and Yong Li. $s^{3}$ : Social-network simulation system with large language model-empowered agents. arXiv preprint arXiv:2307.14984, 2023.
- Dasgupta et al. [2023] Ishita Dasgupta, Christine Kaeser-Chen, Kenneth Marino, Arun Ahuja, Sheila Babayan, Felix Hill, and Rob Fergus. Collaborating with language models for embodied reasoning. arXiv preprint arXiv:2302.00763, 2023.
- Zhu et al. [2023] Xizhou Zhu, Yuntao Chen, Hao Tian, Chenxin Tao, Weijie Su, Chenyu Yang, Gao Huang, Bin Li, Lewei Lu, Xiaogang Wang, et al. Ghost in the minecraft: Generally capable agents for open-world environments via large language models with text-based knowledge and memory. arXiv preprint arXiv:2305.17144, 2023.
- Gao et al. [2024] Chen Gao, Xiaochong Lan, Nian Li, Yuan Yuan, Jingtao Ding, Zhilun Zhou, Fengli Xu, and Yong Li. Large language models empowered agent-based modeling and simulation: A survey and perspectives. Humanities and Social Sciences Communications, 11(1):1–24, 2024.
- Qu [2024] Youyang Qu. Federated learning driven large language models for swarm intelligence: A survey. arXiv preprint arXiv:2406.09831, 2024.
- Strobel et al. [2024] Volker Strobel, Marco Dorigo, and Mario Fritz. Llm2swarm: robot swarms that responsively reason, plan, and collaborate through llms. arXiv preprint arXiv:2410.11387, 2024.
- Feng et al. [2024] Shangbin Feng, Zifeng Wang, Yike Wang, Sayna Ebrahimi, Hamid Palangi, Lesly Miculicich, Achin Kulshrestha, Nathalie Rauschmayr, Yejin Choi, Yulia Tsvetkov, et al. Model swarms: Collaborative search to adapt llm experts via swarm intelligence. arXiv preprint arXiv:2410.11163, 2024.
- Jiao et al. [2023] Aoran Jiao, Tanmay P Patel, Sanjmi Khurana, Anna-Mariya Korol, Lukas Brunke, Vivek K Adajania, Utku Culha, Siqi Zhou, and Angela P Schoellig. Swarm-gpt: Combining large language models with safe motion planning for robot choreography design. arXiv preprint arXiv:2312.01059, 2023.
- Liu et al. [2024b] Yitong Liu, Zihao Zhou, Jiawen Liu, Liangming Chen, and Jiankun Wang. Multi-agent formation control using large language models. Authorea Preprints, 2024b.
- Liu et al. [2024c] Hsu-Shen Liu, So Kuroki, Tadashi Kozuno, Wei-Fang Sun, and Chun-Yi Lee. Language-guided pattern formation for swarm robotics with multi-agent reinforcement learning. In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 8998–9005. IEEE, 2024c.