# AI-Newton: A Concept-Driven Physical Law Discovery System without Prior Physical Knowledge
**Authors**: You-Le Fang, Dong-Shan Jian, Xiang Li, Yan-Qing Ma
> School of Physics, Peking University, Beijing 100871, China
> School of Physics, Peking University, Beijing 100871, China Center for High Energy Physics, Peking University, Beijing 100871, China
(December 11, 2025)
## Abstract
While current AI-driven methods excel at deriving empirical models from individual experiments, a significant challenge remains in uncovering the common fundamental physics that underlie these models—a task at which human physicists are adept. To bridge this gap, we introduce AI-Newton, a novel framework for concept-driven scientific discovery. Our system autonomously derives general physical laws directly from raw, multi-experiment data, operating without supervision or prior physical knowledge. Its core innovations are twofold: (1) proposing interpretable physical concepts to construct laws, and (2) progressively generalizing these laws to broader domains. Applied to a large, noisy dataset of mechanics experiments, AI-Newton successfully rediscovers foundational and universal laws, such as Newton’s second law, the conservation of energy, and the universal gravitation. This work represents a significant advance toward autonomous, human-like scientific discovery.
Introduction. — For centuries, the ultimate goal of fundamental physics research has been to describe a wide range of phenomena through a small number of discovered laws. Advances in artificial intelligence (AI) have made AI-driven scientific discovery a highly promising new paradigm [1]. Although AI has achieved remarkable results in tackling domain-specific challenges [2, 3], the ultimate aspiration from a paradigm-shifting perspective still lies in developing reliable AI systems capable of autonomous scientific discovery directly from a large collection of raw data without supervision [4, 5].
Current approaches to automated physics discovery focus on individual experiments, employing either neural network (NN)-based methods [6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25] or symbolic techniques [26, 27, 28, 29, 30, 31, 32, 33]. By analyzing data from a single experiment, these methods can construct a specific model capable of predicting future data from the same experiment; if sufficiently simple, such a model may even be expressed in symbolic form [34, 35, 36]. Although these methods represent a crucial and successful stage towards automated scientific discovery, they have not yet reached a discovery capacity comparable to that of human physicists.
Human scientists advance further by discerning common patterns across specific models from different experiments and, on that basis, formulating general models that account for data from all such experiments. For instance, Newtonian mechanics provides a unifying and interpretable framework by defining meaningful physical concepts and formulating general laws that are valid across diverse phenomena. Therefore, a central challenge for the AI-driven physics discovery field is to evolve beyond problem-specific model fitting towards AI systems capable of discovering knowledge that is inherently generalizable and universally applicable.
In this Letter, we present AI-Newton, a concept-driven discovery system, which is designed for the critical question: how to extract concepts and general laws from problem-specific models. AI-Newton integrates an autonomous discovery workflow which is fundamentally built upon plausible reasoning and physical concepts. Given a collection of physical experiments, AI-Newton can gradually formulate a set of general laws applicable across a wide problem scope with neither supervision nor any prior physical knowledge. As a proof-of-concept implementation Code available at https://github.com/Science-Discovery/AI-Newton, by applying it to 46 different classical mechanics experiments, it can rediscover Newton’s second law, energy conservation, law of gravitation and others in classical mechanics.
<details>
<summary>overview.png Details</summary>
### Visual Description
\n
## Diagram: Autonomous Scientific Discovery Workflow
### Overview
This diagram illustrates an autonomous scientific discovery workflow, connecting an "Experiment base" to a "Theory base" through an "Autonomous discovery workflow" module. The workflow involves selection, search for physical laws, simplification/classification, and extraction of concepts and laws. The diagram highlights the iterative process of refining knowledge from experimental data into theoretical frameworks.
### Components/Axes
The diagram is divided into three main sections:
* **Experiment base (Left):** Contains "Experiment 1", "Experiment 2", and "Experiment N". Each experiment includes "Physical objects", "Geometric information", "Experimental parameters", "Space-time coordinates", and a "Data generator".
* **Autonomous discovery workflow (Center):** This section is further divided into four stages: "Selection", "Search of physical laws", "Simplification and classification", and "Extraction of concepts and general laws". These stages are connected by arrows indicating the flow of information.
* **Theory base (Right):** Contains "Symbols", "Concepts", and "Laws". Concepts are represented by and extracted from Symbols. Laws are represented by and extracted from Concepts. Concepts are categorized into "Dynamical concepts", "Intrinsic concepts", and "Universal constants". Laws are categorized into "Specific laws" and "General laws".
Below the diagram are icons representing supporting technologies: "Recommendation engine", "Symbolic regression", "Differential algebra & variable control", and "Plausible reasoning".
### Detailed Analysis or Content Details
The diagram shows a flow of information from the Experiment base to the Theory base, mediated by the Autonomous discovery workflow.
* **Experiment Base:** The experiments are numbered sequentially (1, 2, N), suggesting a series of iterative experiments. The components within each experiment are listed as text labels.
* **Autonomous Discovery Workflow:**
* **Selection:** This stage receives "Experiments" from the Experiment base and outputs "One experiment" and "A few concepts".
* **Search of physical laws:** This stage receives input from "Selection" and outputs "Laws". Within this stage, there is text stating "Extension of general laws" and "direct search of specific laws".
* **Simplification and classification:** This stage receives input from "Search of physical laws" and outputs nothing explicitly.
* **Extraction of concepts and general laws:** This stage receives input from "Simplification and classification" and outputs "Concepts" and "Laws".
* **Theory Base:**
* **Symbols:** The starting point, leading to Concepts.
* **Concepts:** Categorized as "Dynamical concepts", "Intrinsic concepts", and "Universal constants".
* **Laws:** Categorized as "Specific laws" and "General laws". The diagram shows a bidirectional relationship between Concepts and Laws, with arrows indicating "represent" and "extract".
The supporting technologies are represented by icons at the bottom of the diagram.
### Key Observations
The diagram emphasizes the cyclical nature of scientific discovery. Experiments generate data, which is then processed to extract concepts and laws, which in turn can be used to guide further experimentation. The workflow is designed to automate this process, potentially accelerating the pace of scientific advancement. The distinction between "Specific laws" and "General laws" suggests a hierarchical organization of knowledge.
### Interpretation
This diagram represents a conceptual model for automating the scientific method. It proposes a system where experimental data is not just analyzed by humans, but actively used to refine and expand theoretical knowledge. The workflow is designed to move from concrete observations (experiments) to abstract principles (laws). The inclusion of technologies like "Symbolic regression" and "Differential algebra" suggests that the system relies on advanced mathematical and computational techniques. The "Plausible reasoning" component indicates an attempt to incorporate elements of human intuition and judgment into the automated process.
The diagram suggests a shift from hypothesis-driven research to a more data-driven approach, where theories emerge from the analysis of experimental data rather than being imposed upon it. The iterative nature of the workflow implies that the system is capable of self-correction and refinement, potentially leading to the discovery of novel scientific insights. The diagram does not provide specific data or numerical values, but rather a high-level overview of a proposed system.
</details>
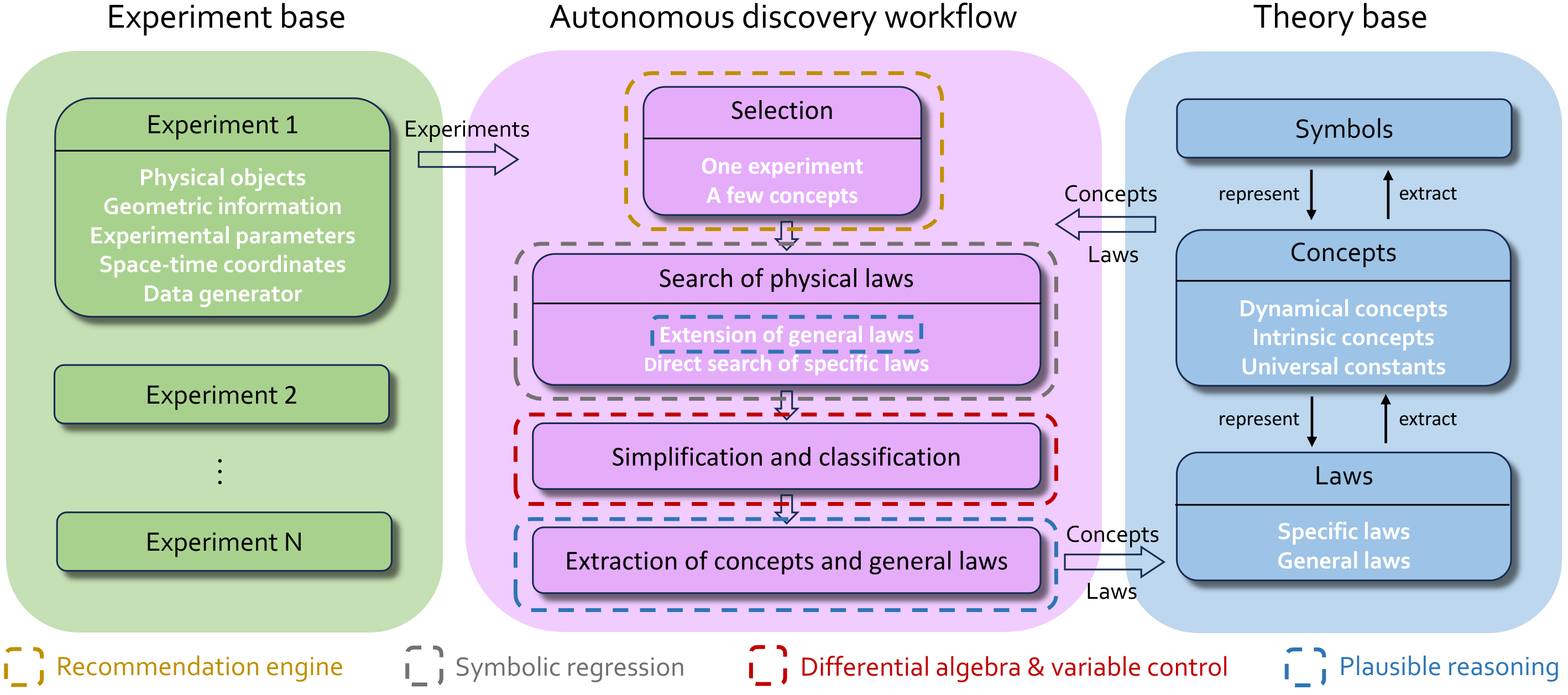
Figure 1: AI-Newton’s experiment base, theory base, and autonomous discovery workflow.
Knowledge base and knowledge representation. — AI-Newton contains an experiment base and a theory base, as shown in Fig. 1. The experiment base stores physical experiments and corresponding simulated data generators. The inputs for each experiment include only the physical objects involved, geometric information, experimental parameters, and space-time coordinates, which define an experiment. To emphasize that no prior physical knowledge is used, all other concepts, such as mass or energy, are autonomously discovered in AI-Newton. The output of each experiment is simulated data with statistical errors.
The theory base stores physical knowledge explicitly in an interconnected library of symbols, concepts, and laws. This design mirrors how human physicists construct concise, universal laws from conceptual building blocks. In contrast to prior work, which interprets latent features in NNs as physical concepts [37, 23, 38], AI-Newton represents concepts and laws in an explicit, symbolic form. This greatly enhances interpretability and makes the acquired knowledge easier to transfer to new problems. Moreover, the introduction of powerful intermediate concepts allows complex physical laws to be expressed concisely, which in turn makes them more amenable to discovery through techniques like symbolic regression (SR) [26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36]. Initially, the concept layer contains only space-time coordinates; new concepts are autonomously defined and registered using a dedicated physical domain-specific language (DSL). (See Supplemental Materials (SMs) [39] for details.)
A robust knowledge representation is crucial because our goal is for the AI to discover generalizable knowledge across diverse systems, which requires transferring knowledge between different problems. To achieve this, we designed a physical DSL with a well-defined structure. This DSL not only formulates equations but also encodes the properties of physical objects and the relationships between physical quantities. For instance, given the known concepts of coordinate $x$ and time $t$ , the velocity of a ball can be defined in the DSL as:
$$
C_{1}:=\forall i\text{: Ball},\,\mathrm{d}x[i]/\mathrm{d}t, \tag{1}
$$
where $i$ indexes the balls and $C_{1}$ denotes the symbol of velocity, with the subscript $1$ varying across tests. In addition to dynamical concepts like velocity, the system also automatically identifies two other types: intrinsic concepts (e.g., mass, spring constant), which depend solely on specific physical objects, and universal constants (e.g., the gravitational constant), which are independent of all other quantities. Both are defined by documenting their measurement procedures. For example, mass of a ball could be defined as:
$$
\begin{split}C_{2}:=&\forall i\text{: Ball},\text{Intrinsic}[\\
&\text{ExpName}(o_{1}\rightarrow i,o_{2}\to s),\text{L}[s]-\text{L}_{0}[s]],\end{split} \tag{2}
$$
where ExpName is the name of an experiment. In this experiment, the measured ball $i$ is suspended from a fixed spring $s$ , and the spring elongation $\text{L}[s]-\text{L}_{0}[s]$ serves as the measurement of the mass. Recording the measurement procedures of intrinsic concepts is essential, since it allows the value of an intrinsic property to be retrieved by invoking its defining experiment, ensuring conceptual consistency across different problems.
These explicit concepts serve as the building blocks for the laws layer, which stores discovered physical laws, such as conserved quantities and dynamical equations. The laws are categorized into specific laws (valid for one experiment with specific forms) and general laws (valid across diverse experiments with general forms). Within this framework, prior research in AI-driven physics discovery has concentrated on identifying specific laws. The introduction of general laws enables AI-Newton to simultaneously describe physics in various complex systems with compact and concise formulations. For instance, consider a system with a ball on an inclined plane connected to a fixed end via a spring. By applying the general law discovered by AI-Newton (Newton’s second law in the $x$ -direction):
$$
\forall i:\text{Ball},\,m_{i}a_{i,x}+(\nabla_{i}V_{g})_{x}+(\nabla_{i}V_{k})_{x}=0, \tag{3}
$$
the more complex dynamical equation of the ball can be concretely derived as:
$$
\begin{split}&ma_{x}-\frac{c_{x}c_{z}}{c_{x}^{2}+c_{y}^{2}+c_{z}^{2}}mg\\
+&\frac{\left[\left(c_{y}^{2}+c_{z}^{2}\right)x-c_{x}\left(c_{y}y+c_{z}z\right)\right]}{\left(c_{x}^{2}+c_{y}^{2}+c_{z}^{2}\right)L}k\Delta{L}=0,\end{split} \tag{4}
$$
where $(c_{x},c_{y},c_{z})$ is the normal vector defining the inclined plane. For multi-object systems, concrete dynamical equations can be much more complex than the general laws, making them hard to be obtained using previous symbolic approaches. These cases highlight the efficacy of our concept-driven hierarchical approach.
Autonomous discovery workflow. — The autonomous discovery workflow in AI-Newton continuously distill knowledge—expressed as physical concepts and laws—from experimental data, as shown in Fig. 1. Plausible reasoning, a method based on rational inference from partial evidence [40, 41], is the key to discovering knowledge. Unlike deductive logic, it produces contextually reasonable rather than universally certain conclusions, mirroring scientific practice where hypotheses precede rigorous verification.
The workflow initiates each trial by selecting an experiment and a few concepts from the theory base. This selection is governed by a recommendation engine that integrates a UCB-inspired value function [42, 43, 44, 45, 46] with a dynamically adapted NN. The NN’s architecture is updated in real-time to favor configurations that lead to efficient knowledge extraction. This mechanism enables the system to emulate human-like learning, naturally balancing the trade-off between exploration and exploitation.
To ensure the workflow establishes foundational knowledge before tackling complex experiments, we introduce an era-control strategy. Within a given era, every trial must conclude within a specific wall-clock time limit. If no new knowledge is acquired after a sufficient number of trials, the system advances to a new era with an exponentially increased time limit. Consequently, this strategy keeps the system focused on simpler experiments in the early phases. (See SMs [39] for more details.)
The next step of each trial is to explore new laws from the selected experiment and concepts. Specific laws can be discovered through direct searching for relations among the selected concepts within the allowed operational space, which is nothing but SR. Our SR implementation combines direct instantiation-verification and PCA-based differential polynomial regression [47, 48, 49, 50]. Furthermore, new general laws may emerge by extending existing ones through plausible reasoning. The core idea of plausible reasoning here is that, if a general law holds across multiple experiments but fails in the current one, there is a possibility to derive a valid modified law by adding simple terms to the original formulation via SR. For instance, while kinetic energy conservation governs elastic collisions, it fails in spring systems. Through plausible reasoning, AI-Newton introduces additional terms (elastic potential) to restore conservation. Mirroring human research practice, the system heuristically leverages existing general laws and selected concepts to search for physical laws that explain new experimental data.
The aforementioned process may generate redundant knowledge causing an explosion in both the theory base and search space that severely hinders continuous discovery under limited resources. To address this, AI-Newton simplifies physical laws into minimal representations in each trial. For the example shown in this paper, we employ the Rosenfeld Gröbner algorithm [51, 52, 53, 54] from differential algebra to perform the simplification (See SMs [39] for more details). Furthermore, through controlled-variable analysis, AI-Newton numerically identifies the dependencies of relations on physical objects and experimental parameters, using these dependencies as the basis for classification.
After identifying new laws, AI-Newton extracts new concepts from the processed results through plausible reasoning: a conserved quantity in the current experiment suggests broader utility, triggering its extraction as a new concept. Similarly, it proposes new general laws from directly-searched specific laws that also hold in multiple other experiments. All accumulated knowledge are updated to the theory base.
<details>
<summary>test_cases.png Details</summary>
### Visual Description
\n
## Diagram: Physical Experiments & General Laws
### Overview
The image presents a visual connection between physical objects, schematic representations of experiments involving springs and spheres, and discovered general laws of physics – energy conservation and Newton's second law. The diagram is divided into three main sections: "Physical objects" (left), "Schematic of experiments" (center), and "Discovered important general laws" (right). The experiments appear to explore concepts related to gravity, motion, and energy transfer.
### Components/Axes
The diagram doesn't have traditional axes. Instead, it uses visual arrangement to convey relationships. The sections are labeled as follows:
* **Physical objects:** A sphere and a triangular prism.
* **Schematic of experiments:** Nine numbered diagrams depicting arrangements of spheres and springs.
* **Discovered important general laws:** Textual descriptions of energy conservation and Newton's second law, along with mathematical formulations.
### Detailed Analysis or Content Details
**Physical Objects (Left):**
* A sphere is depicted at the top.
* A triangular prism is depicted at the bottom.
**Schematic of Experiments (Center):**
The center section contains nine numbered diagrams:
1. A sphere connected to a spring, with an arrow indicating motion.
2. Two spheres connected by a spring, with arrows indicating reciprocal motion.
3. Multiple spheres connected in a chain by springs, with arrows indicating wave-like motion.
4. A sphere connected to a spring, angled upwards, suggesting motion against gravity.
5. A sphere resting on a spring above a surface.
6. A sphere compressing a spring on a surface.
7. A sphere compressing a spring on a surface, with an arrow indicating release.
8. A sphere compressing a spring on a surface, with an arrow indicating release and upward motion.
9. A sphere rolling down an inclined plane with a spring at the bottom.
**Discovered Important General Laws (Right):**
* **Energy Conservation:** The equation is: ∑<sub>κ∈{x,y,z}</sub> T<sub>κ</sub> + ∑<sub>λ∈{k,g,G}</sub> δ<sub>λ</sub>V<sub>λ</sub> = const.
* Definitions:
* T<sub>κ</sub> = ∑<sub>i∈Particles</sub> m<sub>i</sub>v<sub>κ</sub><sup>2</sup>
* V<sub>κ</sub> = ∑<sub>i∈springs</sub> k<sub>i</sub>(L<sub>i</sub> - L<sub>0</sub>)<sup>2</sup>
* V<sub>g</sub> = ∑<sub>i∈Particles</sub> 2m<sub>i</sub>gZ<sub>i</sub>
* V<sub>G</sub> = ∑<sub>i,j∈Particles</sub> G m<sub>i</sub>m<sub>j</sub> / r<sub>ij</sub>
* **Newton's Second Law:** The equation is: 2a<sub>κ</sub> + ∑<sub>λ∈{k,g,G}</sub> δ<sub>λ</sub>(1/m ∂V<sub>λ</sub>/∂κ) = 0, κ∈{x,y,z}.
* Note: (δ<sub>λ</sub> = 0 or 1, determined spontaneously during instantiation as specific laws in experiments)
### Key Observations
* The experiments progressively increase in complexity, starting with a single spring-sphere system and culminating in a rolling sphere on an inclined plane.
* The diagrams visually represent concepts like oscillation, wave propagation, and the influence of gravity.
* The mathematical formulations of energy conservation and Newton's second law provide a quantitative framework for understanding the observed phenomena.
* The use of δ<sub>λ</sub> in the equations suggests a conditional application of certain forces or potentials based on the specific experimental setup.
### Interpretation
The diagram illustrates a conceptual progression from simple physical systems to fundamental laws of physics. The experiments are designed to demonstrate how energy is conserved and how forces affect motion. The mathematical equations provide a precise description of these relationships. The inclusion of δ<sub>λ</sub> suggests that the laws are not universally applicable but are contingent on the specific conditions of the experiment. The diagram implies a scientific method approach: observation of physical phenomena (experiments) leading to the formulation of general laws (mathematical equations). The arrangement of the diagram suggests a cause-and-effect relationship: physical objects and experiments inspire the discovery of general laws. The diagram is a high-level conceptual overview rather than a detailed quantitative analysis. It serves as a visual aid for understanding the interconnectedness of physics concepts.
</details>
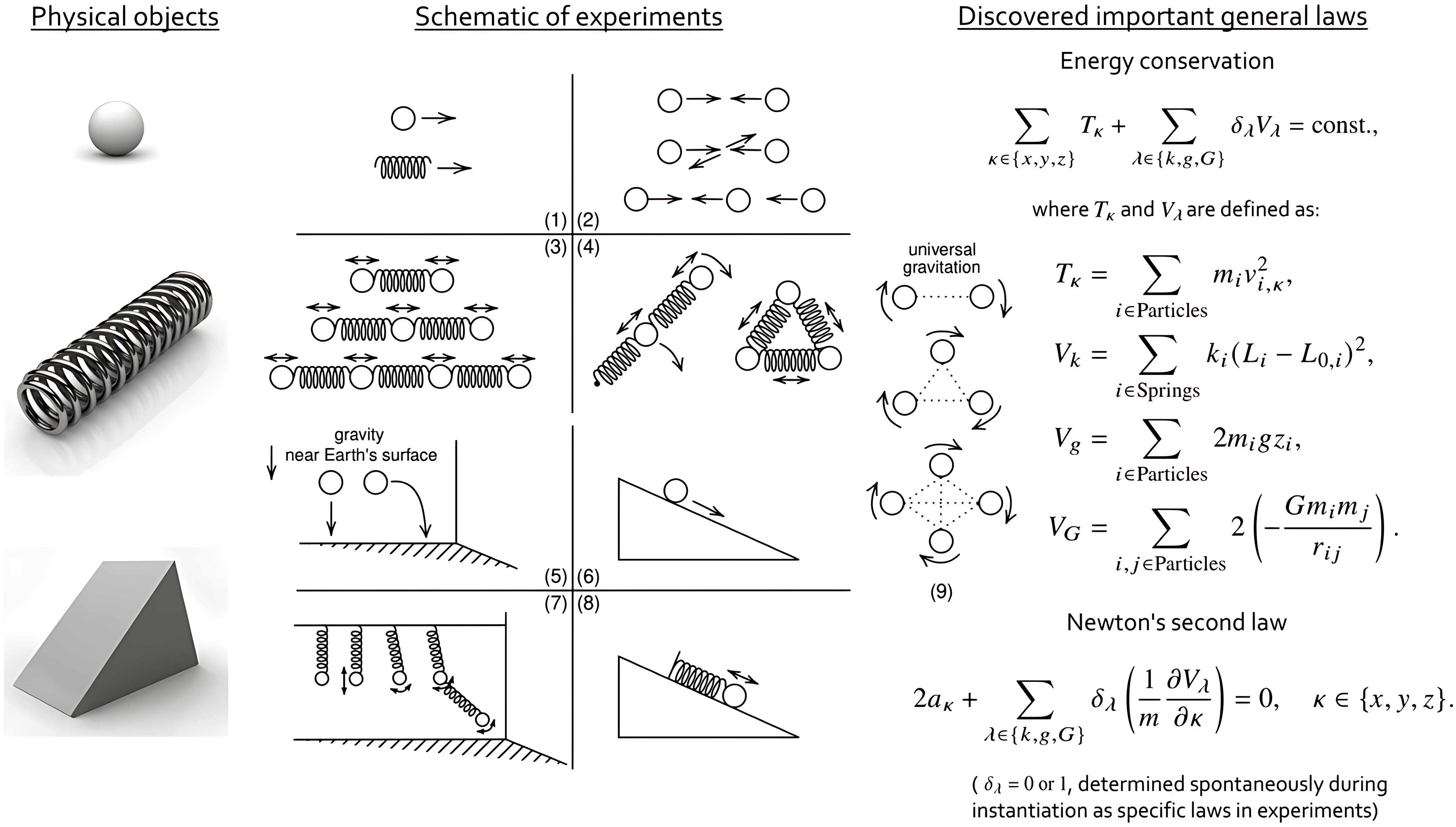
Figure 2: Schematic of tested experiments and main general laws discovered. Some complex configurations are omitted for clarity. See text for details.
Rediscovering Laws of Newtonian Mechanics. — To evaluate AI-Newton’s performance, we apply it to Newtonian mechanics problems, focusing on a set of 46 predefined experiments. These experiments involve three primary types of physical objects: balls (either small balls or celestial bodies), springs, and inclined planes. The experiments are designed to investigate both isolated and coupled systems, as illustrated in Fig. 2, including:
1. Free motion of individual balls and springs;
1. Elastic collision of balls;
1. Coupled systems demonstrating translational vibrations, rotational oscillations, and pendulum-like motions;
1. Gravity-related problems, such as projectile motion and motion on inclined planes, along with complex spring-ball systems;
1. Celestial mechanics problems involving gravitational interactions.
The complexities of experiments are systematically increased by varying the number of physical objects and spatial dimensions, encompassing high-degree-of-freedom problems such as coupled oscillations of chained 2-ball-2-spring systems on inclined planes, rotational dynamics of 4-ball-4-spring systems, and other complex configurations. To simulate realistic experimental conditions, all test data are generated by solving differential equations and incorporating Gaussian-distributed errors. This comprehensive experimental setup covers three types of forces in Newtonian mechanics, elastic forces, gravity near Earth’s surface, and universal gravitational forces, while incorporating realistic measurement uncertainties. In this way, it enables rigorous evaluation of AI-Newton’s capability to discover physical laws from noisy experimental data.
We evaluated the performance of our proof-of-concept implementation on an Intel Xeon Platinum 8370C (128 threads @ 3.500GHz) platform with NVIDIA A40 GPU, configured with 64 cores for parallel processing. With max trials set to 1200 and an average runtime of 48 hours, the system demonstrated robust knowledge discovery capabilities, identifying approximately 90 physical concepts and 50 general laws on average across the test cases. The discoveries include significant general laws such as energy conservation and Newton’s second law along with their relevant concepts, as shown in Fig. 2, providing complete explanatory for all experiments covering systems from simple to high-degree-of-freedom complex configurations.
<details>
<summary>knowledge_progression.png Details</summary>
### Visual Description
\n
## Scatter Plot with Error Bars: Concept Development Over Trials
### Overview
The image presents a scatter plot with error bars, illustrating the development of several concepts (labeled F<sub>G</sub>, G, V<sub>G</sub>, F<sub>k</sub>, V<sub>k</sub>, P, T, a, g, k, l, m) across a range of trials. The x-axis represents the number of trials, while the y-axis lists the concepts. The plot is divided into six vertical regions labeled I through VI, likely representing stages or phases of development. Each concept is represented by a data point with horizontal error bars indicating uncertainty.
### Components/Axes
* **X-axis:** Number of trials (Scale: 0 to 800, increments of 100)
* **Y-axis:** Concepts (Labels: F<sub>G</sub>, G, V<sub>G</sub>, F<sub>k</sub>, V<sub>k</sub>, P, T, a, g, k, l, m) - listed from top to bottom.
* **Vertical Regions:** Labeled I, II, III, IV, V, VI, dividing the plot into stages.
* **Data Points:** Black dots representing the concept's value at a given number of trials.
* **Error Bars:** Horizontal lines extending from each data point, indicating the uncertainty or range of values.
### Detailed Analysis
The data points and their approximate values (with uncertainty represented by the error bar extent) are as follows:
* **F<sub>G</sub>:** Appears around 700 trials, at approximately y = 7.5, with an error bar extending roughly ± 0.5.
* **G, V<sub>G</sub>:** Both appear around 700 trials, G at approximately y = 6.5, with an error bar extending roughly ± 0.5, and V<sub>G</sub> at approximately y = 6, with an error bar extending roughly ± 0.5.
* **F<sub>k</sub>:** Appears around 400 trials, at approximately y = 5, with an error bar extending roughly ± 0.5.
* **V<sub>g</sub>:** Appears around 300 trials, at approximately y = 4.5, with an error bar extending roughly ± 0.5.
* **V<sub>k</sub>:** Appears around 300 trials, at approximately y = 4, with an error bar extending roughly ± 0.5.
* **P:** Appears around 300 trials, at approximately y = 3.5, with an error bar extending roughly ± 0.5.
* **T:** Appears around 300 trials, at approximately y = 3, with an error bar extending roughly ± 0.5.
* **a:** Appears around 200 trials, at approximately y = 2.5, with an error bar extending roughly ± 0.5.
* **g:** Appears around 200 trials, at approximately y = 2, with an error bar extending roughly ± 0.5.
* **k:** Appears around 100 trials, at approximately y = 1.5, with an error bar extending roughly ± 0.5.
* **l:** Appears around 100 trials, at approximately y = 1.2, with an error bar extending roughly ± 0.3.
* **m:** Appears around 0 trials, at approximately y = 0.8, with an error bar extending roughly ± 0.3.
**Trends:**
* Concepts generally appear later in the trial sequence.
* The concepts appear to emerge sequentially, with 'm' appearing first and 'F<sub>G</sub>' appearing last.
* The error bars suggest a relatively consistent level of uncertainty across all concepts and trials.
### Key Observations
* The concepts are ordered on the y-axis, potentially indicating a hierarchy or dependency.
* The division into stages (I-VI) suggests a structured process of concept development.
* The error bars are relatively consistent in size, suggesting similar levels of uncertainty in the measurement or estimation of each concept's value.
* There is a clear progression of concept emergence as the number of trials increases.
### Interpretation
The data suggests a staged process of concept development, where simpler concepts ('m', 'l', 'k') emerge earlier in the trial sequence, and more complex concepts ('F<sub>G</sub>', 'G', 'V<sub>G</sub>') emerge later. The vertical regions (I-VI) likely represent distinct phases of this development, potentially involving different learning mechanisms or cognitive processes. The error bars indicate that the concept values are not precisely defined, but rather represent a range of possible values, reflecting the inherent uncertainty in the measurement or estimation of these concepts.
The sequential emergence of concepts suggests a building-block approach to learning, where earlier concepts serve as foundations for later, more complex concepts. The consistent error bar size suggests that the uncertainty associated with each concept is relatively stable throughout the trial sequence. This could indicate that the learning process is consistent and predictable, or that the measurement methods are reliable.
The plot provides a visual representation of how cognitive structures or understanding evolve over time through repeated trials or experiences. It could be used to model learning processes, track the development of expertise, or evaluate the effectiveness of training programs.
</details>
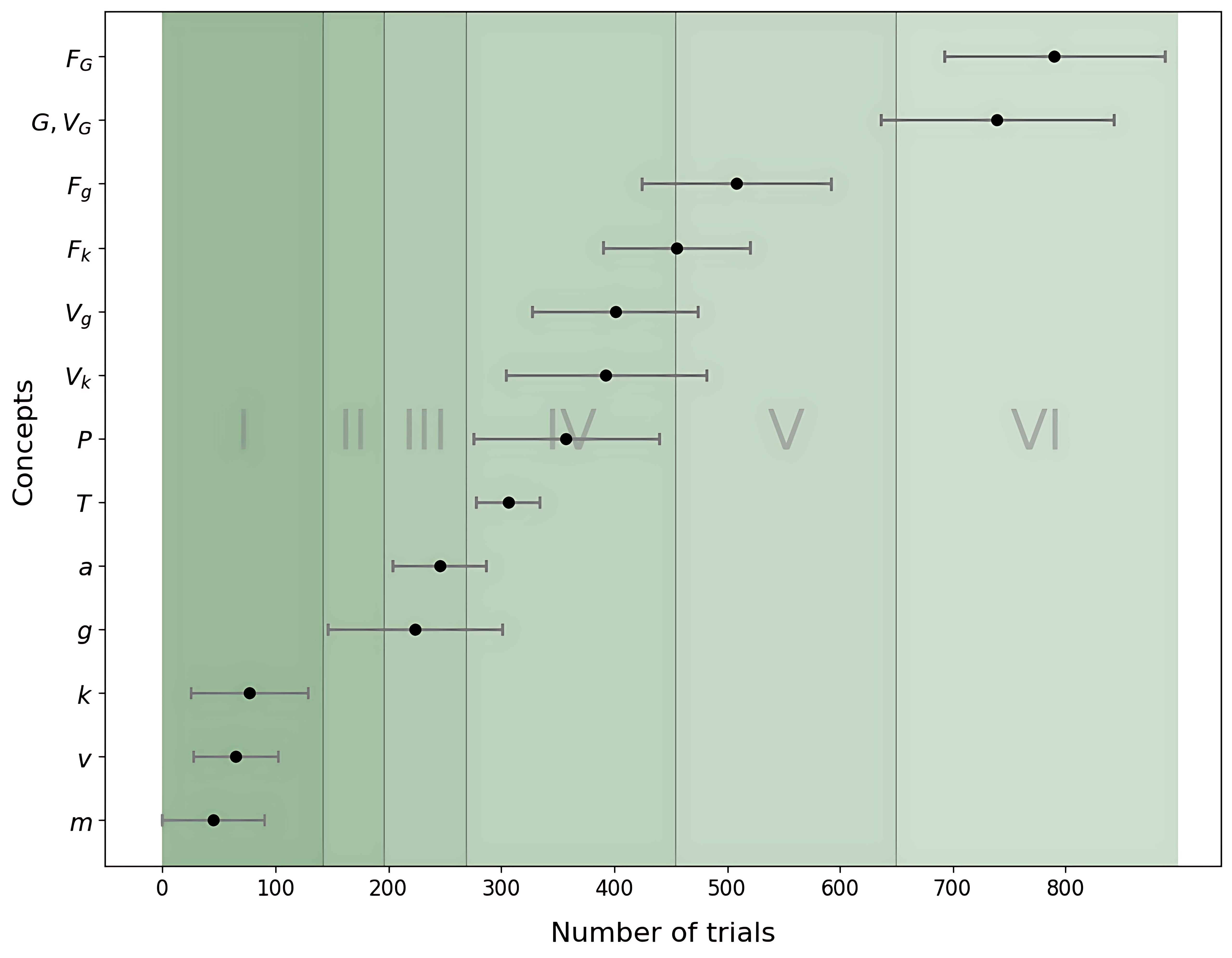
Figure 3: Statistical analysis of concept discovery timing on 10 test cases, recording the mean and standard deviation of discovery timings for key concepts. Number of trials means the number of analysis trial attempt has been done, not distinguishing which experiment. Roman numerals (I, II, …) in the background indicate the eras defined by the era-control strategy.
Statistical discovery progression on 10 test cases is illustrated in Fig. 3, showing the timing distribution of important concept discoveries. This discovery progression exhibits an incremental pattern, where AI-Newton first explores simple concepts (e.g., mass) before advancing to more complex ones (e.g., force). For instance, gravitational acceleration $g$ is defined as a constant by analyzing free-fall or projectile motion, where the vertical acceleration $a_{z}$ of the ball is invariant. In experiments with elastic collisions between balls, conservation of kinetic energy $T$ is discovered and proposed as a general law. Through plausible reasoning, elastic potential energy $V_{k}$ , gravitational potential energy near Earth’s surface $V_{g}$ , and universal gravitational potential energy $V_{G}$ are progressively defined when trying to apply the conservation of kinetic energy to inelastic experiments. These are then incorporated with kinetic energy conservation to ultimately formulate the complete law of energy conservation. The discovery of Newton’s second law follows an analogous progression: it is first proposed in a simple experimental context and then generalized through plausible reasoning.
It is important to emphasize that the system is able to independently discover and unify fundamental concepts from disparate physical contexts. For instance, AI-Newton can derive the concept of ‘mass’ through two distinct experimental routes: from the static elongation of a spring under gravity (defining gravitational mass, $m_{g}$ ) and from the experiment of a horizontal spring-mass oscillation system (defining inertial mass, $m_{i}$ ). Critically, the system then autonomously verify the numerical equivalence of $m_{g}$ and $m_{i}$ , effectively indicating a cornerstone of general relativity—the weak equivalence principle—from raw data alone.
Summary. — We introduce AI-Newton, a novel framework for the autonomous discovery of general physical laws from raw data across a large set of experiments, without supervision or pre-existing physical knowledge. This approach transcends current AI-driven methods, which are limited to extracting specific laws from individual experiments. Our main contributions are based on plausible reasoning, enabling us to: (1) propose physical concepts from the extracted laws; and (2) extend an existing general law by adding new terms, thereby adapting it to describe a wider range of experiments. Introducing interpretable physical concepts allows discovered laws to remain concise, making them more tractable for SR to identify. Furthermore, iteratively constructing general laws from existing ones enables a gradual, scalable discovery process. Applied to a large, noisy dataset of mechanics experiments, AI-Newton successfully rediscovers foundational laws, including Newton’s second law, the conservation of energy, and the law of universal gravitation. This work thus offers a promising pathway toward building AI systems capable of contributing to frontier scientific research.
As a first step, we employ AI-Newton to rediscover known physical laws—a task where direct reliance on large language models (LLMs) is unsuitable, as they already possess this knowledge. In future applications to frontier science, however, the DSL, the recommendation engine and the plausible reasoning components of the framework could be replaced or augmented by LLMs. This integration would grant the system direct access to all existing knowledge, enabling a more informed and efficient discovery process.
Acknowledgements. We would like to thank Hong-Fei Zhang for early participant of the project and many valuable discussions. This work is supported by the National Natural Science Foundation of China (No. 12325503), and the High-performance Computing Platform of Peking University.
## References
- [1] Y. Xu, X. Liu, X. Cao, C. Huang, E. Liu, S. Qian, X. Liu, Y. Wu, F. Dong, C.-W. Qiu, et al., Artificial intelligence: A powerful paradigm for scientific research, The Innovation 2 (2021) .
- [2] H. Wang, T. Fu, Y. Du, W. Gao, K. Huang, Z. Liu, P. Chandak, S. Liu, P. Van Katwyk, A. Deac, et al., Scientific discovery in the age of artificial intelligence, Nature 620 (2023) 47–60.
- [3] X. Zhang, L. Wang, J. Helwig, Y. Luo, C. Fu, Y. Xie, M. Liu, Y. Lin, Z. Xu, K. Yan, et al., Artificial intelligence for science in quantum, atomistic, and continuum systems, Foundations and Trends® in Machine Learning 18 (2025) 385–912.
- [4] C. Lu, C. Lu, R. T. Lange, J. Foerster, J. Clune, and D. Ha, The ai scientist: Towards fully automated open-ended scientific discovery, [arXiv:2408.06292].
- [5] C. K. Reddy and P. Shojaee, Towards scientific discovery with generative ai: Progress, opportunities, and challenges, Proceedings of the AAAI Conference on Artificial Intelligence 39 (Apr., 2025) 28601–28609.
- [6] M. Schmidt and H. Lipson, Distilling free-form natural laws from experimental data, science 324 (2009) 81–85.
- [7] S. Brunton, J. Proctor, and J. Kutz, Discovering governing equations from data: Sparse identification of nonlinear dynamical systems, Proceedings of the National Academy of Sciences 113 (09, 2015) 3932–3937.
- [8] K. Champion, B. Lusch, J. N. Kutz, and S. L. Brunton, Data-driven discovery of coordinates and governing equations, Proceedings of the National Academy of Sciences 116 (2019) 22445–22451.
- [9] T. Wu and M. Tegmark, Toward an artificial intelligence physicist for unsupervised learning, Physical Review E 100 (2019) 033311.
- [10] S. Greydanus, M. Dzamba, and J. Yosinski, Hamiltonian neural networks. Curran Associates Inc., Red Hook, NY, USA, 2019.
- [11] M. Cranmer, S. Greydanus, S. Hoyer, P. Battaglia, D. Spergel, and S. Ho, Lagrangian neural networks, [arXiv:2003.04630].
- [12] B. M. De Silva, D. M. Higdon, S. L. Brunton, and J. N. Kutz, Discovery of physics from data: Universal laws and discrepancies, Frontiers in artificial intelligence 3 (2020) 25.
- [13] Z. Liu and M. Tegmark, Machine learning conservation laws from trajectories, Physical Review Letters 126 (2021) 180604.
- [14] G. E. Karniadakis, I. G. Kevrekidis, L. Lu, P. Perdikaris, S. Wang, and L. Yang, Physics-informed machine learning, Nature Reviews Physics 3 (2021) 422–440.
- [15] Z. Liu, V. Madhavan, and M. Tegmark, Machine learning conservation laws from differential equations, Physical Review E 106 (2022) 045307.
- [16] G. Camps-Valls, A. Gerhardus, U. Ninad, G. Varando, G. Martius, E. Balaguer-Ballester, R. Vinuesa, E. Diaz, L. Zanna, and J. Runge, Discovering causal relations and equations from data, Physics Reports 1044 (2023) 1–68.
- [17] C. Cornelio, S. Dash, V. Austel, T. R. Josephson, J. Goncalves, K. L. Clarkson, N. Megiddo, B. El Khadir, and L. Horesh, Combining data and theory for derivable scientific discovery with ai-descartes, Nature Communications 14 (2023) 1777.
- [18] P. Lemos, N. Jeffrey, M. Cranmer, S. Ho, and P. Battaglia, Rediscovering orbital mechanics with machine learning, Machine Learning: Science and Technology 4 (2023) 045002.
- [19] Z. Liu, P. O. Sturm, S. Bharadwaj, S. J. Silva, and M. Tegmark, Interpretable conservation laws as sparse invariants, Phys. Rev. E 109 (Feb, 2024) L023301.
- [20] R. Cory-Wright, C. Cornelio, S. Dash, B. El Khadir, and L. Horesh, Evolving scientific discovery by unifying data and background knowledge with ai hilbert, Nature Communications 15 (2024) 5922.
- [21] D. Zheng, V. Luo, J. Wu, and J. B. Tenenbaum, Unsupervised learning of latent physical properties using perception-prediction networks, [arXiv:1807.09244].
- [22] M. Tegmark, Latent Representations of Dynamical Systems: When Two is Better Than One, [arXiv:1902.03364].
- [23] R. Iten, T. Metger, H. Wilming, L. Del Rio, and R. Renner, Discovering physical concepts with neural networks, Physical review letters 124 (2020) 010508.
- [24] B. Chen, K. Huang, S. Raghupathi, I. Chandratreya, Q. Du, and H. Lipson, Automated discovery of fundamental variables hidden in experimental data, Nature Computational Science 2 (2022) 433–442.
- [25] Q. Li, T. Wang, V. Roychowdhury, and M. K. Jawed, Metalearning generalizable dynamics from trajectories, Physical Review Letters 131 (2023) 067301.
- [26] S.-M. Udrescu and M. Tegmark, Ai feynman: A physics-inspired method for symbolic regression, Science Advances 6 (2020) eaay2631.
- [27] S.-M. Udrescu, A. Tan, J. Feng, O. Neto, T. Wu, and M. Tegmark, Ai feynman 2.0: Pareto-optimal symbolic regression exploiting graph modularity, Advances in Neural Information Processing Systems 33 (2020) 4860–4871.
- [28] T. Bendinelli, L. Biggio, and P.-A. Kamienny, Controllable neural symbolic regression, in International Conference on Machine Learning, pp. 2063–2077, PMLR. 2023.
- [29] W. Tenachi, R. Ibata, and F. I. Diakogiannis, Deep symbolic regression for physics guided by units constraints: toward the automated discovery of physical laws, The Astrophysical Journal 959 (2023) 99.
- [30] Y. Tian, W. Zhou, M. Viscione, H. Dong, D. Kammer, and O. Fink, Interactive symbolic regression with co-design mechanism through offline reinforcement learning, Nature Communications 16 (04, 2025) .
- [31] M. Cranmer, Interpretable machine learning for science with pysr and symbolicregression. jl, [arXiv:2305.01582].
- [32] M. Du, Y. Chen, Z. Wang, L. Nie, and D. Zhang, Large language models for automatic equation discovery of nonlinear dynamics, Physics of Fluids 36 (2024) .
- [33] B. Romera-Paredes, M. Barekatain, A. Novikov, M. Balog, M. P. Kumar, E. Dupont, F. J. Ruiz, J. S. Ellenberg, P. Wang, O. Fawzi, et al., Mathematical discoveries from program search with large language models, Nature 625 (2024) 468–475.
- [34] M. Valipour, B. You, M. Panju, and A. Ghodsi, Symbolicgpt: A generative transformer model for symbolic regression, arXiv:2106.14131 (2021) .
- [35] X. Chu, H. Zhao, E. Xu, H. Qi, M. Chen, and H. Shao, Neural symbolic regression using control variables, [arXiv:2306.04718].
- [36] S. Mežnar, S. Džeroski, and L. Todorovski, Efficient generator of mathematical expressions for symbolic regression, Machine Learning 112 (2023) 4563–4596.
- [37] C. Wang, H. Zhai, and Y.-Z. You, Emergent schrödinger equation in an introspective machine learning architecture, Science Bulletin 64 (2019) 1228–1233.
- [38] B.-B. Li, Y. Gu, and S.-F. Wu, Discover physical concepts and equations with machine learning, [arXiv:2412.12161].
- [39] “See the arXiv supplemental material for details on the domain-specific language, recommendation engine, and computational engine.”.
- [40] G. Pólya, Mathematics and plausible reasoning: Induction and analogy in mathematics, vol. 1. Princeton University Press, 1990.
- [41] G. Pólya, Mathematics and Plausible Reasoning: Patterns of plausible inference, vol. 2. Princeton University Press, 1990.
- [42] T. Lai and H. Robbins, Asymptotically efficient adaptive allocation rules, Adv. Appl. Math. 6 (Mar., 1985) 4–22.
- [43] T. L. Lai, Adaptive treatment allocation and the multi-armed bandit problem, The Annals of Statistics 15 (1987) 1091–1114. http://www.jstor.org/stable/2241818.
- [44] R. Agrawal, Sample mean based index policies by o (log n) regret for the multi-armed bandit problem, Advances in applied probability 27 (1995) 1054–1078.
- [45] M. N. Katehakis and H. Robbins, Sequential choice from several populations., Proceedings of the National Academy of Sciences 92 (1995) 8584–8585.
- [46] P. Auer, Using confidence bounds for exploitation-exploration trade-offs, Journal of Machine Learning Research 3 (2002) 397–422. https://www.jmlr.org/papers/volume3/auer02a/auer02a.pdf.
- [47] K. Pearson, Liii. on lines and planes of closest fit to systems of points in space, The London, Edinburgh, and Dublin Philosophical Magazine and Journal of Science 2 (1901) 559–572.
- [48] L. Wang, Discovering phase transitions with unsupervised learning, Phys. Rev. B 94 (Nov, 2016) 195105.
- [49] H. Kiwata, Deriving the order parameters of a spin-glass model using principal component analysis, Physical Review E 99 (2019) 063304.
- [50] D. Yevick, Conservation laws and spin system modeling through principal component analysis, Computer Physics Communications 262 (2021) 107832.
- [51] F. Boulier, D. Lazard, F. Ollivier, and M. Petitot, Representation for the radical of a finitely generated differential ideal, in Proceedings of the 1995 international symposium on Symbolic and algebraic computation, ISSAC ’95, pp. 158–166. Association for Computing Machinery, New York, NY, USA, 1995.
- [52] F. Boulier, D. Lazard, F. Ollivier, and M. Petitot, Computing representations for radicals of finitely generated differential ideals, Applicable Algebra in Engineering, Communication and Computing 20 (2009) 73–121.
- [53] Maplesoft, Differential algebra in maple, Maplesoft Help Center (2024) . https://cn.maplesoft.com/support/help/Maple/view.aspx?path=DifferentialAlgebra.
- [54] Maplesoft, Maple 2024, 2024. https://www.maplesoft.com/products/maple/.