# ReasonFlux-PRM: Trajectory-Aware PRMs for Long Chain-of-Thought Reasoning in LLMs
**Authors**:
- Jiaru Zou
- Ling Yang2,4∗\textsuperscript{{$\dagger$}}
- Jingwen Gu
- Jiahao Qiu
- Ke Shen
- Jingrui He
- Mengdi Wang (UIUC Princeton University Cornell University ByteDance Seed)
[*]Equal Contribution [†]Corresponding authors
## Abstract
Process Reward Models (PRMs) have recently emerged as a powerful framework for supervising intermediate reasoning steps in large language models (LLMs). Previous PRMs are primarily trained on model final output responses and struggle to evaluate intermediate thinking trajectories robustly, especially in the emerging setting of trajectory–response outputs generated by frontier reasoning models like Deepseek-R1. In this work, we introduce ReasonFlux-PRM, a novel trajectory-aware PRM explicitly designed to evaluate the trajectory-response type of reasoning traces. ReasonFlux-PRM incorporates both step-level and trajectory-level supervision, enabling fine-grained reward assignment aligned with structured chain-of-thought data. We adapt ReasonFlux-PRM to support reward supervision under both offline and online settings, including (i) selecting high-quality model distillation data for downstream supervised fine-tuning of smaller models, (ii) providing dense process-level rewards for policy optimization during reinforcement learning, and (iii) enabling reward-guided Best-of-N test-time scaling. Empirical results on challenging downstream benchmarks such as AIME, MATH500, and GPQA-Diamond demonstrate that ReasonFlux-PRM-7B selects higher quality data than strong PRMs (e.g., Qwen2.5-Math-PRM-72B) and human-curated baselines. Furthermore, our derived ReasonFlux-PRM-7B yields consistent performance improvements, achieving average gains of 12.1% in supervised fine-tuning, 4.5% in reinforcement learning, and 6.3% in test-time scaling. We also release our efficient ReasonFlux-PRM-1.5B for resource-constrained applications and edge deployment.
Ling Yang at , Mengdi Wang at
<details>
<summary>plots/intro_res.png Details</summary>
### Visual Description
## Composite Visualization: Multi-Model Performance Analysis (Radar, Training Reward, Accuracy)
### Overview
The image contains three distinct visualizations analyzing model performance across tasks, training dynamics, and solution scaling: a **radar chart** (left), a **line graph** (middle), and a **scatter plot** (right).
### 1. Left: Radar Chart (Multi-Task Performance)
- **Axes & Scale**: Four radial axes: *AIME25* (top), *MATH500* (left), *AIME24* (right), *GPQA-Diamond* (bottom). Radial scale: 0.0–1.0 (markers at 0.2, 0.4, 0.6, 0.8, 1.0).
- **Legend (Bottom)**: Six models (line styles/colors):
- Human Curated (orange dashed)
- Random (yellow dashed)
- Qwen2.5-Math-PRM-7B (blue dashed)
- Skywork-PRM-7B (green dashed)
- Qwen2.5-Math-PRM-72B (red dashed)
- ReasonFlux-PRM-7B (purple solid)
- **Trends**:
- *ReasonFlux-PRM-7B* (purple) dominates across all axes (highest values on AIME25, GPQA-Diamond, etc.).
- *Human Curated* (orange) and *Random* (yellow) show moderate performance, while *Qwen2.5-Math-PRM-7B* (blue) and *Skywork-PRM-7B* (green) have lower scores.
### 2. Middle: Line Graph (Training Reward vs. Step)
- **Axes**:
- Y-axis: *Training Reward* (0.0–0.4).
- X-axis: *Step* (0–180).
- **Legend (Bottom-Right)**: Three models:
- GRPO (blue, square markers)
- Qwen2.5-Math-PRM-7B (orange, triangle markers)
- ReasonFlux-PRM-7B (purple, star markers)
- **Trends**:
- *GRPO* (blue): Starts low (~0.05), rises to ~0.3 by step 20, then fluctuates (0.25–0.3).
- *Qwen2.5-Math-PRM-7B* (orange): Starts ~0.15, rises to ~0.3, then fluctuates (similar to GRPO but slightly higher).
- *ReasonFlux-PRM-7B* (purple): Starts ~0.28, rises steadily to ~0.45 by step 180 (clear upward trend, outperforming others).
### 3. Right: Scatter Plot (Accuracy vs. Number of Solutions, GPQA-Diamond)
- **Title**: *GPQA-Diamond*
- **Axes**:
- Y-axis: *Accuracy (%)* (48–54).
- X-axis: *Number of Solutions (N)* (2¹, 2², 2³, 2⁴ = 2, 4, 8, 16).
- **Legend (Bottom-Right)**: Four models:
- Qwen2.5-Math-PRM-72B (red triangle)
- Skywork-PRM-7B (green triangle)
- Majority (blue square)
- ReasonFlux-PRM-7B (purple star)
- **Data Points (Approximate)**:
- *ReasonFlux-PRM-7B* (purple): N=2¹ (~48.5%), N=2² (~51%), N=2³ (~54%), N=2⁴ (~55%) (highest accuracy).
- *Qwen2.5-Math-PRM-72B* (red): N=2¹ (~48%), N=2² (~50%), N=2³ (~52%), N=2⁴ (~54%).
- *Skywork-PRM-7B* (green): N=2¹ (~48%), N=2² (~49%), N=2³ (~51%), N=2⁴ (~52%).
- *Majority* (blue): N=2¹ (~48%), N=2² (~47.5%), N=2³ (~48.5%), N=2⁴ (~49%) (lowest, with a dip at N=2²).
### Key Observations
- **Radar Chart**: *ReasonFlux-PRM-7B* outperforms all models across multi-task benchmarks (AIME25, MATH500, AIME24, GPQA-Diamond).
- **Training Reward**: *ReasonFlux-PRM-7B* shows a consistent upward trend in training reward, while GRPO and Qwen2.5-Math-PRM-7B plateau.
- **Accuracy Scaling**: *ReasonFlux-PRM-7B* achieves the highest accuracy on GPQA-Diamond, with accuracy increasing with the number of solutions (N). *Majority* (baseline) performs poorly, especially at N=2².
### Interpretation
- **Multi-Task Strength**: *ReasonFlux-PRM-7B* demonstrates superior performance across diverse tasks (AIME, MATH, GPQA), suggesting robust generalization.
- **Training Efficiency**: The upward trend in training reward for *ReasonFlux-PRM-7B* indicates effective learning over steps, outpacing GRPO and Qwen2.5-Math-PRM-7B.
- **Solution Scaling**: For GPQA-Diamond, increasing the number of solutions (N) improves accuracy for all models, but *ReasonFlux-PRM-7B* benefits most, highlighting its ability to leverage more solutions for better performance.
This composite visualization collectively illustrates *ReasonFlux-PRM-7B*’s dominance in multi-task performance, training dynamics, and solution scaling, outperforming baselines (GRPO, Qwen2.5-Math-PRM-7B, Majority) across all metrics.
</details>
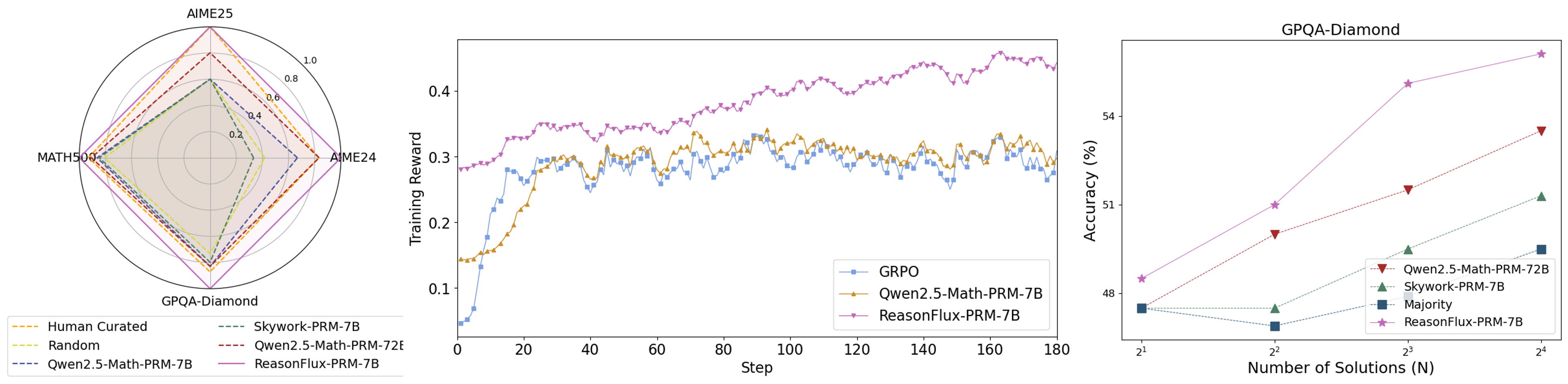
Figure 1: Overview of ReasonFlux-PRM. ReasonFlux-PRM is designed to provide general-purpose reward supervision across multiple application scenarios. Left: Offline selection of high-quality distilled trajectory–response data to enhance downstream supervised fine-tuning of smaller models. Middle: Online reward modeling integrated into GRPO-based policy optimization. Right: Reward-guided Best-of-N test-time scaling to improve inference-time performance.
## 1 Introduction
Process Reward Models [1, 2, 3] have recently emerged as a powerful framework for providing process-level supervision in large language models (LLMs) reasoning process, particularly for complex domains such as mathematical problem solving [4, 5, 1]. Given a question and the corresponding model’s final response, PRMs verify the reasoning step-by-step and assign fine-grained rewards to each step of the response. Prior studies have leveraged PRMs in both post-training stages [6, 7], including providing dense rewards for online reinforcement learning (RL) [8], and reward-guided inference-time scaling [9, 10].
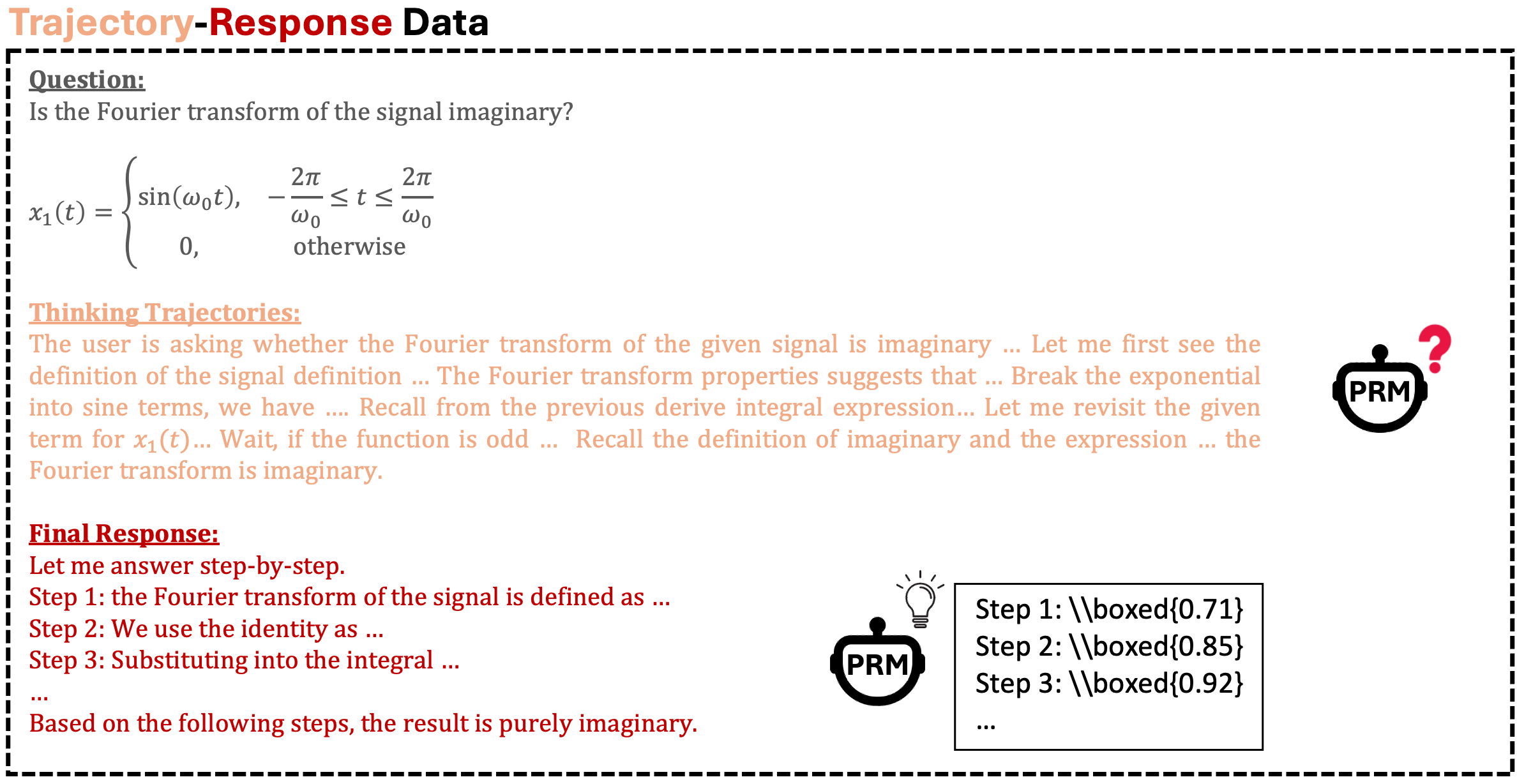
However, existing PRMs are primarily trained and applied to model-generated final responses, typically presented in an explicit and organized stey-by-step chain-of-thought (CoT) format. Concurrently, with recent advancements in frontier reasoning models such as OpenAI-o1 [11] and Deepseek-R1 [12], these models have increasingly adopted a trajectory-response format of output: a lengthy, comprehensive, and less organized intermediate thinking trajectory, followed by a concise, step-by-step final response conditioned on the prior thinking (as illustrated in Figure 2). Such trajectory–response pairs have been widely distilled and acquired from large reasoning models to support downstream training of smaller models, enabling them to emulate the reasoning capabilities of larger models to first think then produce coherent, extended CoT rationales [13, 14, 15]. The increasing utilization of trajectory–response data raises an important question: Can PRMs provide supervision not only to the final responses of large reasoning models, but also to their intermediate thinking trajectories?
Addressing this question first presents a challenge of how to assign informative and correct rewards to the model intermediate thinking trajectories. Unlike final responses, these trajectories are typically treated as silver-standard data [16], automatically generated by large reasoning models without rigorous quality control or standardized verification criteria, making their evaluation inherently noisy and less reliable. To address this, we first revisit several state-of-the-art PRMs and evaluate their performance on trajectory–response pairs. Our analysis reveals that existing PRMs struggle to robustly supervise model thinking trajectories and can degrade downstream training on such data. We further find that this degradation stems primarily from two key issues: an structural and formatting mismatch between intermediate thinking trajectories and final responses, and the lack of trajectory–response data with assigned rewards during PRMs training.
<details>
<summary>plots/data_example.png Details</summary>
### Visual Description
## [Technical Document Snippet]: Trajectory-Response Data (Fourier Transform Problem)
### Overview
The image is a structured technical document (likely an educational or AI-assisted problem-solving snippet) titled **"Trajectory-Response Data"**. It presents a question about the Fourier transform of a signal, a "thinking trajectory" (reasoning process), and a "final response" with step-by-step analysis. The document uses color coding (orange for thinking, red for response) and includes icons labeled "PRM" (one with a question mark, one with a light bulb) and a box with step-wise values.
### Components/Sections
1. **Title**:
- Text: *"Trajectory-Response Data"* (top, with "Trajectory" in orange, "Response" in red, "Data" in black).
2. **Question Section**:
- Label: *"Question:"* (bold, black).
- Question: *"Is the Fourier transform of the signal imaginary?"*
- Signal Definition:
\[
x_1(t) = \begin{cases}
\sin(\omega_0 t), & -\frac{2\pi}{\omega_0} \leq t \leq \frac{2\pi}{\omega_0} \\
0, & \text{otherwise}
\end{cases}
\]
(A windowed sine wave, non-zero only over \( [-\frac{2\pi}{\omega_0}, \frac{2\pi}{\omega_0}] \).)
3. **Thinking Trajectories Section**:
- Label: *"Thinking Trajectories:"* (orange, bold).
- Text (orange, faded):
*"The user is asking whether the Fourier transform of the given signal is imaginary ... Let me first see the definition of the signal definition ... The Fourier transform properties suggests that ... Break the exponential into sine terms, we have .... Recall from the previous derive integral expression... Let me revisit the given term for \( x_1(t) \)... Wait, if the function is odd ... Recall the definition of imaginary and the expression ... the Fourier transform is imaginary."*
- Icon: A black "PRM" icon with a red question mark (right of the text, associated with the thinking process).
4. **Final Response Section**:
- Label: *"Final Response:"* (red, bold).
- Text (red):
*"Let me answer step-by-step. Step 1: the Fourier transform of the signal is defined as ... Step 2: We use the identity as ... Step 3: Substituting into the integral ... ... Based on the following steps, the result is purely imaginary."*
- Icon: A black "PRM" icon with a light bulb (left of the box, associated with the final response).
- Box (right of the icon): Contains:
- *"Step 1: \(\boxed{0.71}\)"*
- *"Step 2: \(\boxed{0.85}\)"*
- *"Step 3: \(\boxed{0.92}\)"*
- *"..."* (indicating additional steps).
### Detailed Analysis (Content Details)
- **Signal Properties**: \( x_1(t) \) is an **odd function** (sine is odd, and the interval \( [-\frac{2\pi}{\omega_0}, \frac{2\pi}{\omega_0}] \) is symmetric around \( t=0 \)). For odd functions, the Fourier transform’s real part (cosine transform) is zero (since odd × even = odd, and the integral of an odd function over a symmetric interval is zero). Thus, the transform is purely imaginary.
- **Thinking Trajectory Logic**: The reasoning process:
1. Defines the signal.
2. Recalls Fourier transform properties (e.g., odd functions have imaginary transforms).
3. Analyzes the function’s symmetry (odd) to conclude the transform is imaginary.
- **Final Response Structure**: Outlines a step-by-step approach, with boxed values (e.g., 0.71, 0.85, 0.92) for steps 1–3 (context of these values—e.g., coefficients, probabilities—is unclear from the image alone).
### Key Observations
- **Color Coding**: Orange for "thinking" (reasoning), red for "final response" (solution), black for labels.
- **Symmetry Insight**: The signal’s odd symmetry is critical: odd functions have imaginary Fourier transforms (real part = 0).
- **Iconography**: "PRM" icons (question mark for thinking, light bulb for solution) visually distinguish reasoning vs. conclusion.
### Interpretation
This document demonstrates a problem-solving workflow for analyzing a signal’s Fourier transform. The key insight is recognizing \( x_1(t) \) is an **odd function** (sine is odd, symmetric interval), so its Fourier transform is purely imaginary (real part = 0). The "thinking trajectory" shows logical reasoning (defining the signal, recalling properties, analyzing symmetry), while the "final response" structures the solution into steps (with boxed values, possibly confidence scores or step-wise results). This is likely an educational or AI-assisted example, illustrating how to use function symmetry and Fourier transform properties to determine the transform’s nature.
</details>
Figure 2: Illustration of the Trajectory-Response Data generated by Deepseek-R1. Existing PRMs can assign appropriate scores to final responses but often struggle to evaluate intermediate reasoning trajectories accurately.
Motivated by these observations, we propose a new trajectory-aware PRM, namely ReasonFlux-PRM, which incorporates both step-level and trajectory-level supervision to better align the models’ middle thinking trajectories with their final responses. ReasonFlux-PRM is trained on a 10k curated dataset of high-quality trajectory–response pairs covering math and science reasoning. Unlike existing PRMs, ReasonFlux-PRM is explicitly tailored to intermediate thinking processes by providing fine-grained rewards as supervision signals for each step within the thinking trajectory. We further adapt ReasonFlux-PRM for more general reward modeling scenarios, as illustrated in Figure 1. In offline settings, ReasonFlux-PRM assigns scores to filter high-quality trajectory–response pairs, facilitating effective training data curation for downstream supervised fine-tuning of smaller models. In online settings, ReasonFlux-PRM is integrated into reward modeling process to provide fine-grained supervision signals during policy optimization, such as GRPO [17]. Moreover, ReasonFlux-PRM facilitates test-time scaling by evaluating multiple generated responses and selecting the most promising one via a reward-guided Best-of-N strategy.
In summary, our main contributions are:
- In-Depth Trajectory-Response Data Analysis in Long-CoT Reasoning. We identify, formulate, and analyze the problem of adapting several existing PRMs to supervise both models’ intermediate reasoning trajectories and their final responses, motivated by the increasing prevalence of trajectory–response distillation data in downstream post-training and test-time scaling.
- Trajectory-aware Reward Modeling for Data Selection, RL and Test-Time Scaling. We introduce ReasonFlux-PRM, a trajectory-aware process reward model that incorporates both step-level and trajectory-level supervision, enabling fine-grained reward assignment for model thinking trajectories. ReasonFlux-PRM can be integrated into both offline and online workflows for more generalized purposes, including offline selection of high-quality training data, online policy optimization in RL training, and test-time scaling.
- Extensive Downstream Evaluations. Across extensive evaluations on challenging reasoning benchmarks, ReasonFlux-PRM demonstrates superior data selection quality at smaller model scales, with ReasonFlux-PRM-7B outperforming strong baselines such as Qwen2.5-Math-PRM-72B [2] and datasets curated by human experts. On tasks such as AIME [18, 19], MATH500 [20], and GPQA-Diamond [21], ReasonFlux-PRM-7B achieves notable average accuracy improvement of 12.1% during supervised fine-tuning, 4.5% during reinforcement learning, and 6.3% during inference test-time scaling.
## 2 Preliminaries
Trajectory-Response Data. Let $f_{\text{oracle}}(\cdot)$ denote an oracle model, such as Deepseek-R1, capable of producing structured reasoning traces. Given a complex input prompt $x$ , the oracle generates a sequence of intermediate thinking steps followed by a final response. We represent each instance of such data as a tuple $(s,a)$ , where $s=(s_{1},s_{2},\dots,s_{T})$ denotes a thinking trajectory consisting of $T$ intermediate steps, and $a=(a_{1},a_{2},\dots,a_{T})$ denotes the final response, which can also be structured as a chain-of-thought trace with $T$ formatted and organized steps. For large reasoning models, we assume that both $s$ and $a$ consist of $T$ reasoning steps. This structural alignment reflects the modeling assumption that the final output trace $a$ is generated in a step-by-step manner, strictly conditioned on the preceding intermediate reasoning steps $s$ . Both the thinking trajectory and final response are generated auto-regressively by the oracle model, i.e.,
$$
s_{t}\sim f_{\text{oracle}}(x,s_{<t}),\quad a_{t}\sim f_{\text{oracle}}(x,s,a_{<t}), \tag{1}
$$
where $s_{<t}=(s_{1},\dots,s_{t-1})$ and $a_{<t}=(a_{1},\dots,a_{t-1})$ denote the reasoning and answer histories up to step $t$ , respectively. In the trajectory-response outputs distillation setting, the full supervision target instance $y$ can be constructed as the concatenation of thinking trajectories and the final response, i.e., $y=s\oplus a$ .
Process Reward Modeling. Given a trajectory-answer pair $(s,a)$ , where both $s=(s_{1},\dots,s_{T})$ and $a=(a_{1},\dots,a_{T})$ are structured as reasoning traces, the goal of a process reward model is to evaluate each intermediate reasoning step $s_{t}\in s$ with respect to its utility in achieving a correct and coherent final response. We first define a reference reward function $R_{\text{ref}}$ that provides step-level supervision:
$$
r_{t}=R_{\text{ref}}(s_{t}\mid x,s_{<t},a), \tag{2}
$$
where $R_{\text{ref}}(\cdot)$ scores the $t$ -th step conditioned on the input $x$ , the prior thinking trajectory steps, and the full final response $a$ . The total reward for the trajectory is then computed by aggregating the step-by-step scores:
$$
R_{\text{total}}=\mathcal{A}(r_{1},r_{2},\dots,r_{T}), \tag{3}
$$
where $\mathcal{A}(\cdot)$ denotes an aggregation function such as Mean and Sum. The training objective for PRMs is to learn a scoring function $R_{\phi}(\cdot)$ , parameterized by $\phi$ , that approximates the reference reward for each step. This is formulated as minimizing the discrepancy between predicted and reference rewards over a training dataset $\mathcal{D}=\{(x^{(i)},s^{(i)},a^{(i)},r^{(i)}_{1:T})\}_{i=1}^{N}$ , where $r_{t}^{(i)}$ denotes the target reward for step $s_{t}^{(i)}$ . Formally, the training objective can be written as:
$$
\min_{\phi}\ \frac{1}{N}\sum_{i=1}^{N}\sum_{t=1}^{T^{(i)}}\mathcal{L}\left(R_{\phi}(s_{t}^{(i)}\mid x^{(i)},s_{<t}^{(i)},a^{(i)}),\ r_{t}^{(i)}\right). \tag{4}
$$
<details>
<summary>x1.png Details</summary>
### Visual Description
## [Chart Type]: Dual Histograms - Reward Score Distributions
### Overview
The image displays two side-by-side density histograms comparing the distribution of "Reward Scores" for two AI models: **Deepseek-R1** (blue) and **Gemini Flash Thinking** (orange). The left histogram shows the full reward score range (0.0 to 1.0), while the right histogram provides a zoomed-in view of the higher score range (approximately 0.3 to 1.0).
### Components/Axes
* **Chart Type:** Density Histograms (overlaid).
* **X-Axis (Both Plots):** Labeled **"Reward Score"**.
* **Left Plot Range:** 0.0 to 1.0, with major ticks at 0.0, 0.2, 0.4, 0.6, 0.8, 1.0.
* **Right Plot Range:** Approximately 0.3 to 1.0, with major ticks at 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.0.
* **Y-Axis (Both Plots):** Labeled **"Density"**.
* **Left Plot Scale:** 0 to ~3.2 (ticks at 0, 1, 2, 3).
* **Right Plot Scale:** 0 to 8 (ticks at 0, 1, 2, 3, 4, 5, 6, 7, 8).
* **Legend:** Positioned in the top-right corner of each plot.
* **Blue Square:** **Deepseek-R1**
* **Orange Square:** **Gemini Flash Thinking**
### Detailed Analysis
**Left Histogram (Full Range: 0.0 - 1.0):**
* **Trend Verification:** Both distributions are right-skewed, with the bulk of density concentrated at lower scores and a long tail extending towards 1.0.
* **Deepseek-R1 (Blue):** Shows a broad, unimodal distribution. The primary density peak is centered approximately between **0.25 and 0.35**. The distribution has a notable tail extending to the right, with visible density up to 1.0.
* **Gemini Flash Thinking (Orange):** Also shows a broad, unimodal distribution. Its primary density peak is slightly to the left of Deepseek-R1's, centered approximately between **0.20 and 0.30**. Its tail appears to diminish more rapidly after 0.6 compared to Deepseek-R1.
* **Overlap:** The two distributions overlap significantly in the 0.1 to 0.5 range, with Gemini Flash Thinking showing slightly higher density at the very low end (0.0-0.15) and Deepseek-R1 showing slightly higher density in the mid-to-high range (0.5-1.0).
**Right Histogram (Zoomed Range: ~0.3 - 1.0):**
* **Trend Verification:** This view reveals a stark contrast in the high-score region. Deepseek-R1's density increases sharply to a high peak, while Gemini Flash Thinking's density is lower and more dispersed.
* **Deepseek-R1 (Blue):** Exhibits a dramatic, sharp peak in density. The mode (highest point) is located at approximately **Reward Score = 0.92**. The density rises steeply from around 0.8 and falls off sharply after 0.95.
* **Gemini Flash Thinking (Orange):** Shows a much flatter, multi-modal distribution in this range. There are smaller, broad peaks around **0.55, 0.65, and 0.85**. Its highest density in this zoomed view is significantly lower than Deepseek-R1's peak, reaching a maximum of approximately 4 (compared to Deepseek-R1's ~8).
* **Spatial Grounding:** The blue peak (Deepseek-R1) dominates the right side of the chart (0.85-0.95), while the orange distribution (Gemini Flash Thinking) is spread across the center and left of this zoomed view (0.4-0.9).
### Key Observations
1. **Performance Dichotomy:** The two models exhibit fundamentally different reward score profiles. Deepseek-R1 has a distribution that, while broad, has a significant concentration of very high scores. Gemini Flash Thinking's scores are more centrally clustered with less extreme high-end performance.
2. **High-End Concentration:** The right plot highlights that Deepseek-R1 achieves a high density of scores near the maximum (0.9+), suggesting consistent high performance on the evaluated metric. Gemini Flash Thinking's high scores are more scattered.
3. **Distribution Shape:** Both models show right-skewed distributions overall, but the nature of the skew differs. Deepseek-R1's skew is driven by a strong secondary mode at the high end, while Gemini Flash Thinking's skew is more traditional, tapering off gradually.
### Interpretation
The data suggests a significant difference in the performance characteristics of the two AI models on the task measured by the "Reward Score."
* **Deepseek-R1** demonstrates a **bimodal-like tendency** (visible when comparing both plots). It has a primary cluster of moderate scores (0.2-0.4) and a secondary, very strong cluster of excellent scores (0.9+). This could indicate that the model either performs moderately well or excels, with fewer instances of middling performance in the 0.6-0.8 range. The sharp peak at ~0.92 is a notable outlier in terms of density, suggesting a highly reliable high-performance regime.
* **Gemini Flash Thinking** shows a more **conventional, unimodal right-skewed distribution**. Its performance is most frequently in the low-to-moderate range (0.2-0.4), with a steady decline in frequency as scores increase. While it can achieve high scores, it does so with much lower consistency than Deepseek-R1, as evidenced by the lower and more dispersed density in the 0.8-1.0 range.
**In summary:** If the reward score correlates with task success, Deepseek-R1 appears to have a higher probability of achieving top-tier results, while Gemini Flash Thinking's results are more centered around a moderate performance level with greater variability at the high end. The choice between them might depend on whether consistent high performance (favoring Deepseek-R1) or a different performance profile is desired.
</details>
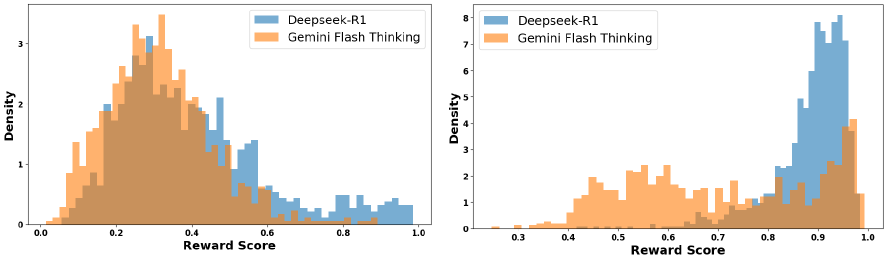
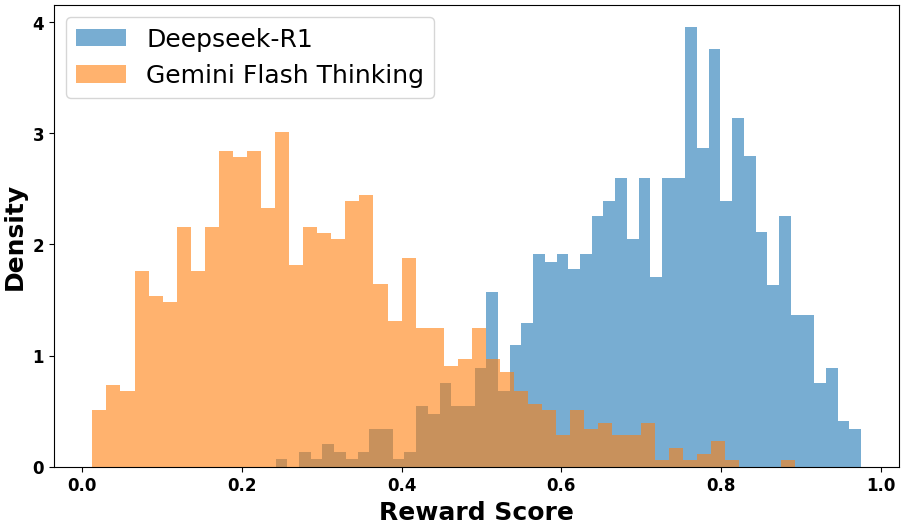
Figure 3: Score distributions rewarded by Qwen2.5-Math-PRM-72B over 1,000 trajectory–response pairs distilled from Deepseek-R1 and the Gemini Flash Thinking API. Left: Distribution of scores computed over thinking trajectories. Right: Distribution of scores based on final responses.
## 3 Existing PRMs Are Not Prepared for Rewarding Thinking Trajectories
To examine whether existing frontier PRMs can be directly applied to reward the trajectory-response data, we first conduct a preliminary study to investigate two key questions:
RQ1: Can PRMs distinguish the quality of thinking trajectories distilled from different oracle models? RQ2: What is the effectiveness of using the PRM-selected trajectory-response data on the downstream fine-tuning of smaller models?
For brevity, we defer detailed experimental setups to Appendix A.1. To investigate RQ1, we evaluate the Qwen2.5-Math-PRM-72B PRM model on 1,000 sampled problems in s1k [13] with trajectory-response traces generated by Google Flash Thinking API [22] and Deepseek-R1 [12], respectively. For each data trace, we apply the PRM model to compute the step-level rewards (spitted by "\n\n "), and then aggregate these rewards by taking the mean to obtain a final trajectory-level reward. Figure 3 (left) compares the distribution of PRM scores across the two oracle models. The histogram shows a significant overlap in the score distributions, though Deepseek-R1 traces tend to receive higher rewards on average, with a longer tail toward high-reward regions (e.g., scores above 0.6). The results suggest that while Qwen2.5-Math-PRM-72B captures some signal for differentiating between the two sources, its discriminative ability remains limited.
Takeaway 1
Several existing PRMs exhibit limitations in distinguishing reasoning traces distilled from different oracle models and often struggle to clearly separate high- and low-quality model thinking trajectories.
Next, to investigate RQ2, we evaluate the performance using the PRM-selected data on the downstream supervised fine-tuning of smaller models. We apply four different PRMs to assign a reward score to each of the 59K raw trajectory-response traces generated by Gemini [22] in s1 [13], using the same mean aggregation over step-level rewards to compute a trajectory-level score. Based on these scores, we rank all traces and select the top 1,000 samples from each PRM as a fine-tuning dataset for the downstream small model. For better comparison, we also adopt the direct set of 1K human-curated examples in s1k [13]. Table 1 presents the accuracy of the fine-tuned Qwen2.5-14B-Instruct on four challenging downstream tasks. We observe that all PRM-selected training sets underperform significantly compared to the human-curated baseline, suggesting that existing PRMs are not yet sufficiently calibrated to identify high-quality trajectory-response data, and can even degrade downstream model performance by selecting suboptimal or misaligned training samples.
Takeaway 2
Direct reliance on current PRMs for trajectory-response selection can yield misaligned training data, which in turn diminishes the effectiveness of downstream supervised fine-tuning for smaller models.
Table 1: Performance of Qwen2.5-14B-Instruct on four challenging reasoning tasks after fine-tuning on the trajectory-response data selected by four different PRMs. We also compare the fine-tuning performance of using PRM-selected data with using randomly sampled data (1k from 59k) and the s1k human-curated data [13].
| SFT Data Source | AIME24 | AIME25 | MATH500 | GPQA-Diamond |
| --- | --- | --- | --- | --- |
| Random | 16.7 ( $\downarrow$ 16.6) | 20.0 ( $\downarrow$ 13.3) | 68.4 ( $\downarrow$ 10.4) | 34.8 ( $\downarrow$ 6.6) |
| Math-Shepherd-PRM-7B | 13.3 ( $\downarrow$ 20.0) | 6.7 ( $\downarrow$ 26.6) | 67.8 ( $\downarrow$ 11.0) | 33.3 ( $\downarrow$ 8.1) |
| Skywork-PRM-7B | 13.3 ( $\downarrow$ 20.0) | 13.3 ( $\downarrow$ 20.0) | 71.8 ( $\downarrow$ 7.0) | 37.9 ( $\downarrow$ 3.5) |
| Qwen2.5-Math-PRM-7B | 26.7 ( $\downarrow$ 6.6) | 20.0 ( $\downarrow$ 13.3) | 73.2 ( $\downarrow$ 5.6) | 39.4 ( $\downarrow$ 2.0) |
| Qwen2.5-Math-PRM-72B | 33.3 ( $\downarrow$ 0.0) | 26.7 ( $\downarrow$ 6.6) | 77.0 ( $\downarrow$ 1.8) | 39.4 ( $\downarrow$ 2.0) |
| on model responses | 36.7 ( $\uparrow$ 3.4) | 26.7 ( $\downarrow$ 6.6) | 77.8 ( $\downarrow$ 1.0) | 40.9 ( $\downarrow$ 0.5) |
| Human-curated (s1k) | 33.3 | 33.3 | 78.8 | 41.4 |
As most existing PRMs are trained on reasoning traces derived from model final output responses rather than intermediate thinking trajectories [2, 23], we take a closer look at the distinctions between genuine thinking trajectories and post-hoc generated responses. As we detailed in the Appendix A.2, these two types of data exhibit several fundamental differences: (i) Thinking trajectories often include branching, where the model revisits earlier steps, explores alternative paths, and revises prior assumptions—behavior rarely observed in the linear and polished structure of final responses. (ii) Thinking trajectories tend to exhibit weaker global coherence across steps, as each step is often locally focused and not optimized for narrative continuity.
To further validate that the performance degradation of existing PRMs stems from the aforementioned data mismatch, we conduct an additional experiment in which Qwen2.5-Math-PRM-72B is applied to score each data instance based solely on the model response, rather than the middle thinking trajectories. As shown in Figure 3 (right), the PRM produces a relatively clearer separation in score distributions between the two oracle models. Also as shown in Table 1 (row: on model responses), the performance drop is reduced when training on PRM-selected data based on final responses, suggesting that existing PRMs are better aligned with model-response-level supervision.
Takeaway 3
Thinking trajectories instinctively differ from final responses, and existing PRMs are more accustomed to scoring final outputs than intermediate reasoning steps.
Motivation on ReasonFlux-PRM. Our findings above highlight the need for a more general reward model that can effectively evaluate both intermediate model thinking trajectories and final responses. As thinking trajectories become integral to supervised and RL-based fine-tuning, existing PRMs, trained primarily on final responses, struggle to provide reliable supervision. To address this, we propose and train a new thinking-aware process reward model tailored to the trajectory-response data supervision.
<details>
<summary>plots/method_pipeline.png Details</summary>
### Visual Description
## [Diagram]: ReasonFlux-PRM Training and Inference Framework
### Overview
The image is a technical diagram illustrating the **ReasonFlux-PRM** framework, split into two primary sections: **ReasonFlux-PRM Training** (left) and **ReasonFlux-PRM Inference** (right). The Training section focuses on data curation and reward design, while Inference covers offline/online deployment.
### Components/Axes (Diagram Structure)
- **Top Headers**:
- Left: *"ReasonFlux-PRM Training"* (red text)
- Right: *"ReasonFlux-PRM Inference"* (blue text)
- **Training Section (Left)**:
- Subsections: *Training Data Curation* (dashed box) and *Reward Design* (dashed box).
- *Training Data Curation*:
- Elements: *"Question"* (icon: person with a question mark), *"Thinking Trajectories"* (icon: brain, steps: `Step 1`, `Step 2`, `Step 3`, ..., `Step t`), *"Final Response"* (icon: gear, steps: `Step 1`, `Step 2`, `Step 3`, ..., `Step t`), labeled *"Trajectory-Response Data"*.
- *Reward Design*:
- Split into *Step-level reward* (left) and *Trajectory-level reward* (right).
- *Step-level reward*:
- *"Quality Reward"* (orange box, arrow: *"Judge"* → *"Expert LLM"* icon).
- *"Coherence Reward"* (steps: `Step 1`, `Step 2`, `Step 3`, ... with arrows between them).
- *"Alignment Reward"* (steps: `Step 1`, `Step 2`, `Step 3`, ... with arrows between them).
- *Trajectory-level reward*:
- *"Question"* (box), *"Thinking Trajectories"* (orange box), *"Final Model Response"* (red box).
- *"Expert LLM"* icon with *"Verify"* arrow → *"Guided Template"* (document icon).
- *"Policy Model"* (θ symbol) with *"Instruct"* arrow from *"Guided Template"*.
- *"Generate"* arrow from *"Policy Model"* → *"Responses"* (list: `1`, `2`, `3`).
- *"Reward"* (clipboard icon) with arrow from *"Responses"*.
- **Inference Section (Right)**:
- Subsections: *Offline Setting* (dashed box) and *Online Setting* (dashed box).
- *Offline Setting*:
- *"Distilled Trajectory-Response Pairs"* (arrow → *"High-quality Data Selection"* box), *"ReasonFlux-PRM"* (label), *"Downstream Training"* (arrow from *"High-quality Data Selection"*).
- *Online Setting*:
- *"1. RL Training"*: *"ReasonFlux-PRM"* → *"A_new"* → *"J_GRPO"* (labeled *"RL Policy Optimization"*).
- *"2. Test-Time-Scaling"*: *"Response 1"* (Score: `0.19`), *"Response 2"* (Score: `0.54`), *"Response 3"* (Score: `0.97`) → *"Response 3"* (arrow), *"ReasonFlux-PRM"* (label).
### Detailed Analysis (Content Details)
- **Training Data Curation**:
- Input: *"Question"* (user query).
- Process: Generate *"Thinking Trajectories"* (step-by-step reasoning: `Step 1` to `Step t`) and *"Final Response"* (step-by-step output: `Step 1` to `Step t`).
- Output: *"Trajectory-Response Data"* (combines thinking steps and final response steps).
- **Reward Design**:
- *Step-level reward*:
- *"Quality Reward"*: Assessed by *"Expert LLM"* (judge icon).
- *"Coherence Reward"*: Evaluates logical flow between steps (arrows between `Step 1`, `Step 2`, `Step 3`, ...).
- *"Alignment Reward"*: Evaluates alignment between steps (arrows between `Step 1`, `Step 2`, `Step 3`, ...).
- *Trajectory-level reward*:
- *"Expert LLM"* verifies *"Question"*, *"Thinking Trajectories"*, and *"Final Model Response"* to create *"Guided Template"*.
- *"Policy Model"* (θ) is instructed by *"Guided Template"* to generate *"Responses"* (`1`, `2`, `3`).
- *"Reward"* is assigned to these responses.
- **Inference - Offline Setting**:
- *"Distilled Trajectory-Response Pairs"* are filtered via *"High-quality Data Selection"* (using ReasonFlux-PRM) for *"Downstream Training"*.
- **Inference - Online Setting**:
- *RL Training*: ReasonFlux-PRM optimizes policy (`A_new` → `J_GRPO`, *"RL Policy Optimization"*).
- *Test-Time-Scaling*: Responses (`1`, `2`, `3`) are scored (`0.19`, `0.54`, `0.97`) by ReasonFlux-PRM, with *"Response 3"* (highest score) selected.
### Key Observations
- **Color Coding**: Orange (thinking trajectories), red (final responses), blue (inference headers), red (training headers).
- **Icons**: Person (question), brain (thinking), gear (final response), expert LLM (judge/verifier), clipboard (reward), document (template).
- **Flow Arrows**: Indicate data curation → reward design → inference (offline/online).
- **Reward Hierarchy**: Step-level (quality/coherence/alignment) vs. Trajectory-level (verification/policy/reward).
### Interpretation
- **Training Phase**: Curates trajectory-response data (thinking + final steps) and designs rewards (step-level: quality/coherence/alignment; trajectory-level: verification/policy/reward) to train ReasonFlux-PRM.
- **Inference Phase**:
- *Offline*: Filters high-quality data for downstream training.
- *Online*: Uses RL to optimize policy and test-time scaling to select the best response (highest score).
- **Purpose**: The framework improves reasoning (via trajectory-based training) and inference (via RL/test-time scaling) by combining step-level and trajectory-level rewards, ensuring quality, coherence, and alignment in responses.
This diagram provides a comprehensive view of how ReasonFlux-PRM is trained (data curation + reward design) and deployed (offline/online inference) to enhance reasoning and response quality.
</details>
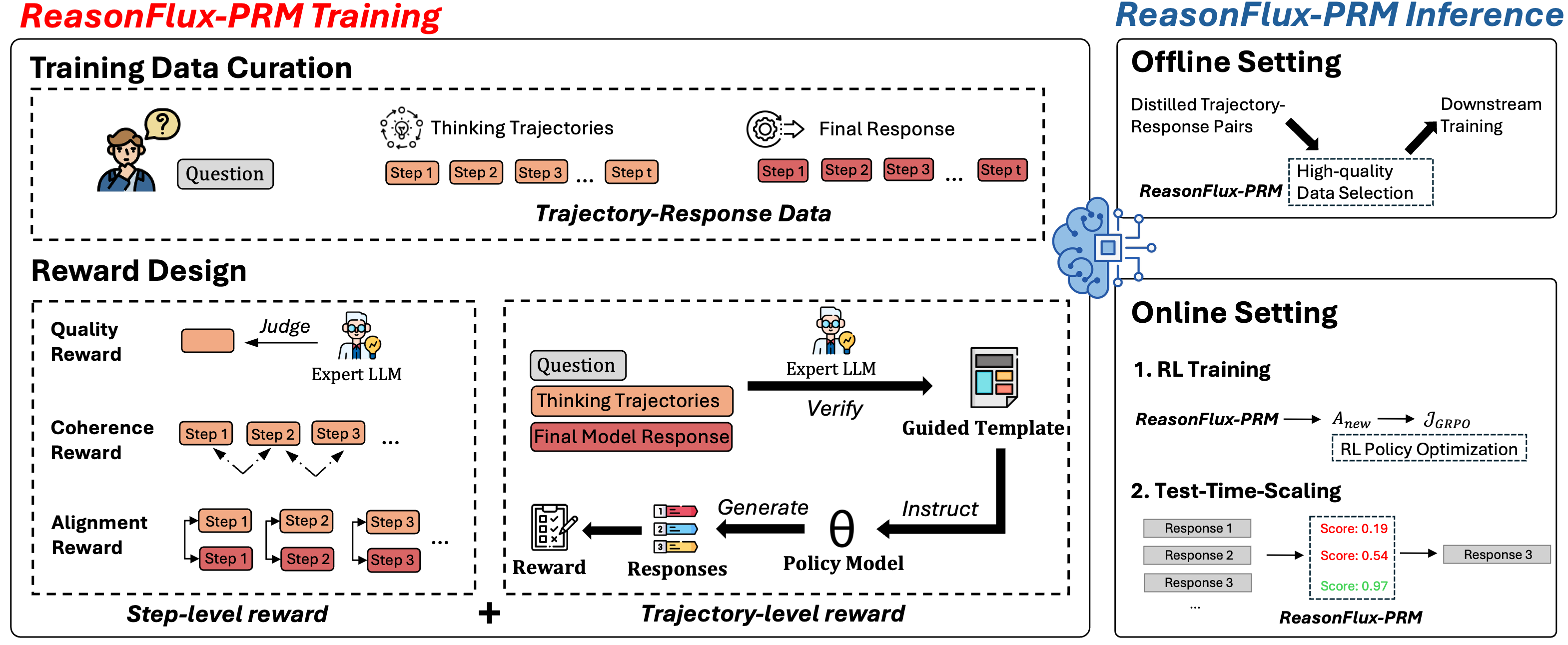
Figure 4: Illustration of the overall method design. ReasonFlux-PRM is trained on trajectory–response data pairs with a novel reward design that integrates both step-level and trajectory-level signals. As a general-purpose PRM, ReasonFlux-PRM supports both offline data selection for supervised fine-tuning of small models and online reward modeling including policy optimization in RL training and test-time scaling.
## 4 ReasonFlux-PRM
In this section, we introduce ReasonFlux-PRM, a trajectory-aware process reward model, as illustrated in Figure 4. We first present a new reward design tailored for thinking trajectories in Section 4.1, which incorporates both step-level and trajectory-level signals to reflect fine-grained and holistic reasoning quality. We then elaborate how ReasonFlux-PRM is applied in a more general reward supervision setting in Section 4.2, covering both offline data selection and online reward modeling.
### 4.1 How Should We Define Process Rewards and Why?
We first propose a new reward design to train ReasonFlux-PRM from the trajectory–response data. Our formulation integrates both step-level and trajectory-level rewards to better address the discrepancy between intermediate thinking trajectories and final responses, and to align ReasonFlux-PRM with the underlying thinking process through more targeted reward signals during training.
Step-level reward for thinking trajectories. As discussed in Section 3, we observe that thinking trajectories are often more complex than final responses, frequently involving branching logic, self-corrections, and redundant reasoning. To better align these two, we incorporate a straightforward alignment score $r_{t}^{\text{align}}$ that measures the semantic similarity between each step in the intermediate thinking trajectories $s_{t}$ and each step in the final response $a_{t}$ :
$$
r_{t}^{\text{align}}=\text{sim}(\Phi(s_{t}),\Phi(a_{t})), \tag{5}
$$
where $\Phi$ is a pretrained encoder and $\text{sim}(\cdot,\cdot)$ denotes cosine similarity. This alignment score uses the final response as a learning signal for earlier thinking trajectories, encouraging those that are topically relevant to the final response and penalizing hallucinated or off-topic content.
Concurrently, to avoid over-penalizing complex yet meaningful thinking trajectory steps that may not be semantically aligned with the final response, we incorporate a complementary quality score $r_{t}^{\text{qual}}$ . Inspired by the LLM-as-a-judge paradigm [24, 25, 26], we employ a strong expert model (e.g., GPT-4o) as a judge $J$ to evaluate the logical soundness of each step $s_{t}$ in context:
$$
r_{t}^{\text{qual}}=J(s_{t}\mid x,s_{<t},a). \tag{6}
$$
The quality score is designed to capture deeper aspects inside reasoning traces, including step correctness, internal coherence, and progression toward the final response.
In addition to alignment with the final model output and logical step quality, we apply a step-by-step coherence score $r_{t}^{\text{coh}}$ to ensure contextual compatibility between adjacent reasoning steps using a contrastive mutual information formulation. Specifically, we model the coherence between each thinking trajectory step $s_{t}$ and its predecessor $s_{t-1}$ by contrasting their embedding similarity against $\mathcal{N}$ negative samples drawn from unrelated trajectories:
$$
r_{t}^{\text{coh}}=\log\frac{\exp(\text{sim}(\Phi(s_{t-1}),\Phi(s_{t}))/\tau)}{\sum_{s^{\prime}\in\mathcal{N}}\exp(\text{sim}(\Phi(s_{t-1}),\Phi(s^{\prime}))/\tau)}, \tag{7}
$$
where $\tau$ is the temperature parameter. By penalizing incoherent transitions or topic shifts, the coherence score encourages each step to be semantically and logically consistent with its immediate predecessor while remaining distinct from unrelated or disjoint reasoning steps. Finally, to aggregate the alignment, quality, and coherence scores into a unified reward signal, we apply softmax-based weighting over the three components:
$$
r_{t}^{\text{step}}=\sum_{k\in\{\text{alig, qua, coh}\}}\text{softmax}(r_{t}^{\text{ali}},r_{t}^{\text{qua}},r_{t}^{\text{coh}})_{k}\cdot r_{t}^{k}. \tag{8}
$$
Template-Guided Trajectory-level Reward. While the step-level rewards offer fine-grained supervision on the completeness and coherence of individual reasoning steps, they might not fully assess whether the overall problem-solving strategy encoded in model’s thinking trajectory is reliably leads to correct solutions, derived from the final response. We thus introduce a template-guided trajectory-level reward to evaluate each trajectory-response data at a higher level of abstraction [27, 15].
Specifically, given an input problem $x$ and the distilled trajectory-response $y=s\oplus a$ , we employ a strong expert LLM (e.g., GPT-4o) as a verifier $v$ . The verifier processes the complete output $y$ and extracts a reasoning template $\mathcal{T}$ , which captures the high-level strategy underlying the original trajectory-response trace. By abstracting the high-level strategy, the template provides a structured guide for subsequent reasoning. The detailed prompt used for template generation is provided in Appendix B. Next, a policy model $\pi_{\theta}$ is conditioned on the extracted template $\mathcal{T}$ and tasked with solving the input problem $x$ by strictly adhering to the prescribed template $\mathcal{T}$ . The model generates $N$ chain-of-thought responses as follows:
$$
y^{(1)},\dots,y^{(N)}\sim\pi_{\theta}(\cdot\mid x,\mathcal{T}). \tag{1}
$$
Then, we define the trajectory-level reward $r^{\text{final}}$ as the average correctness of the generated responses:
$$
r^{\text{final}}=\frac{1}{N}\sum_{j=1}^{N}\mathbb{I}\big(y^{(j)}\text{ is correct}\big). \tag{9}
$$
The template-guided trajectory-level reward evaluates whether the high-level reasoning strategy can be generalized and executed by the policy model independent of the low-level execution in the original trace.
Joint Training Objective. To fully leverage both step-level and trajectory-level supervision signals, we integrate the previously defined rewards and propose the following joint training objective:
$$
\mathcal{L}_{\text{total}}=\lambda_{\text{step}}\cdot\frac{1}{T}\sum_{t=1}^{T}\mathcal{L}_{\text{step}}\left(R_{\phi}(s_{t}\mid x,s_{<t},a),\ r_{t}^{\text{step}}\right)+\lambda_{\text{final}}\cdot\mathcal{L}_{\text{final}}\left(R_{\phi}(x,y),\ r^{\text{final}}\right), \tag{10}
$$
where we adopt mean squared error (MSE) as the loss function for both the step and trajectory reward supervision, and $\lambda_{\text{step}}$ and $\lambda_{\text{final}}$ are tunable parameters to balance the relative contributions of fine-grained step supervision and high-level strategic feedback. We train ReasonFlux-PRM with this joint objective as the practical surrogate for the optimization objective in Eq. 4 to align with both token-level and trajectory-level reward signals, thereby enabling the supervision effectiveness on the trajectory-response data.
### 4.2 Offline Data Selection and Online Reward Modeling
We elaborate on the utilities of ReasonFlux-PRM from two perspectives: (i) Offline trajectory-response data selection, where ReasonFlux-PRM is used to identify and select high-quality reasoning traces for downstream supervised fine-tuning and reinforcement learning; and (ii) Online reward modeling, where ReasonFlux-PRM provides token-level and trajectory-level reward signals during RL training, and enables efficient reward estimation for test-time scaling.
Offline Data Selection. For offline data selection, ReasonFlux-PRM assigns each trajectory–response pair ( $x,y=s\oplus a$ ) a step-level reward sequence $\{\hat{r}_{t}^{\text{step}}\}_{t=1}^{T}$ for each reasoning steps and a trajectory-level reward $\hat{r}^{\text{final}}$ . The overall score is computed as:
$$
\hat{r}=\frac{1}{T}\sum_{t=1}^{T}\hat{r}_{t}^{\text{step}}+\alpha\cdot\hat{r}^{\text{final}}, \tag{11}
$$
where $\alpha$ balances the contributions of local and global reward signals. The aggregated score $\hat{r}$ is applied to filter samples for later downstream supervised fine-tuning of smaller models.
Online Reward Modeling. We first leverage ReasonFlux-PRM to produce a composite reward signal that guides policy optimization through process-level supervision during reinforcement learning. Specifically, during the RL training, we incorporate ReasonFlux-PRM into the Group Relative Policy Optimization (GRPO) [17]. By default, GRPO optimizes for the outcome-level reward $r_{\text{out}}$ , which reflects the task accuracy of the policy $\pi_{\theta}$ on each training sample. To incorporate process-level supervision from ReasonFlux-PRM, we augment this reward with the PRM-based reward $\hat{r}$ in Eq. 11. Given input $x$ and sampled response $y\sim\pi_{\theta}(\cdot\mid x)$ , the new composite reward used for policy training after incorporating ReasonFlux-PRM then becomes:
$$
r_{\text{new}}=(1-\beta)\cdot r_{\text{out}}+\beta\cdot\hat{r}, \tag{12}
$$
where $\beta$ controls the relative weight of supervision from $\hat{r}$ . With a total of G group size (i.e., number of sampled responses per input), we proceed with group-normalized advantage estimation as:
$$
A_{\text{new}}=\frac{r_{\text{new}}-\text{mean}(\{r_{\text{new}}\}_{j=1}^{G})}{\text{std}(\{r_{\text{new}}\}_{j=1}^{G})}. \tag{13}
$$
With the ReasonFlux-PRM derived advantage term $A_{\text{new}}$ , we then update the GRPO objective by:
Note that ReasonFlux-PRM can be seamlessly integrated into other online RL policy optimization algorithms such as PPo [28] and Reinforce $++$ [29] by replacing the reward signal with ReasonFlux-PRM ’s composite rewards.
Reward-guided Test-Time Scaling. During inference, we further apply ReasonFlux-PRM into test-time-scaling strategies such as Best-of-N to identify the most promising output from a set of generated candidates. For each new input question and its corresponding set of sampled model responses, ReasonFlux-PRM assigns a score to each response based on the formulation in Eq. 11, and selects the response with the highest score as the final output.
## 5 Empirical Evaluations
We empirically evaluate ReasonFlux-PRM, focusing on two core applications: (i) Offline data selection, where ReasonFlux-PRM identifies high-quality reasoning traces to improve supervised fine-tuning; and (ii) Online reward modeling, where ReasonFlux-PRM offers reward signals for Best-of-N decoding strategy in test-time scaling and GRPO-based policy optimization.
Benchmarks. We evaluate ReasonFlux-PRM on four representative and challenging reasoning benchmarks, including MATH500 [20], a diverse set of 500 mathematical problems of varying difficulty; AIME24 [18], consisting of 30 problems from the 2024 American Invitational Mathematics Examination (AIME); AIME25, which includes 15 problems from the 2025 AIME [19]; and GPQA-Diamond [21], a benchmark of 198 PhD-level science questions to assess advanced scientific reasoning.
Implementation Details. We train ReasonFlux-PRM using two off-the-shelf base models, Qwen2.5-1.5B-Instruct and Qwen2.5-7B-Instruct [30], resulting in ReasonFlux-PRM-1.5B and ReasonFlux-PRM-7B, respectively. The training data is primarily sourced from the public trajectory-response reasoning traces such as OpenThoughts-114K [31]. All experiments are conducted on 8 A100 GPUs. Additional experimental setups including ReasonFlux-PRM training details and downstream tasks model configurations are provided in Appendix C.
Baselines and Models. For offline data selection, we compare ReasonFlux-PRM with the four frontier PRMs introduced in Section 3, using Qwen2.5-14B-Instruct [32, 30] as the generator model for standard supervised fine-tuning evaluations. For online reward modeling, constrained by computational resources, we primarily use 7B-scale models as policy models for reinforcement learning, including Qwen2.5-7B and Deepseek-R1-Distill-Qwen-7B [12]. For test-time Best-of-N scaling, we adopt Qwen2.5-14B as the generator model to evaluate inference-time performance.
Table 2: Offline Data Selection Comparison. We fine-tune the generator model Qwen2.5-14B-Instruct using data selected by ReasonFlux-PRM-7B and additional baselines. The highest performance of the generators trained on each data source is bold. ReasonFlux-PRM-7B achieves better performance than the strongest human-curated baseline.
| SFT Data Source | AIME24 | AIME25 | MATH500 | GPQA-Diamond |
| --- | --- | --- | --- | --- |
| Human-curated (s1k) | 33.3 | 33.3 | 78.8 | 41.4 |
| Random | 16.7 ( $\downarrow$ 16.6) | 20.0 ( $\downarrow$ 13.3) | 68.4 ( $\downarrow$ 10.4) | 34.8 ( $\downarrow$ 6.6) |
| Math-Shepherd-PRM-7B | 13.3 ( $\downarrow$ 20.0) | 6.7 ( $\downarrow$ 26.6) | 67.8 ( $\downarrow$ 11.0) | 33.3 ( $\downarrow$ 8.1) |
| Skywork-PRM-7B | 13.3 ( $\downarrow$ 20.0) | 13.3 ( $\downarrow$ 20.0) | 71.8 ( $\downarrow$ 7.0) | 37.9 ( $\downarrow$ 3.5) |
| Qwen2.5-Math-PRM-7B | 26.7 ( $\downarrow$ 6.6) | 20.0 ( $\downarrow$ 13.3) | 73.2 ( $\downarrow$ 5.6) | 39.4 ( $\downarrow$ 2.0) |
| Qwen2.5-Math-PRM-72B | 33.3 ( $\downarrow$ 0.0) | 26.7 ( $\downarrow$ 6.6) | 77.0 ( $\downarrow$ 1.8) | 39.4 ( $\downarrow$ 2.0) |
| on model responses | 36.7 ( $\uparrow$ 3.4) | 26.7 ( $\downarrow$ 6.6) | 77.8 ( $\downarrow$ 1.0) | 40.9 ( $\downarrow$ 0.5) |
| ReasonFlux-PRM-7B | 40.0 ( $\uparrow$ 6.7) | 33.3 ( $\uparrow$ 0.0) | 84.8 ( $\uparrow$ 6.0) | 47.5 ( $\uparrow$ 6.1) |
<details>
<summary>plots/TAP_data.png Details</summary>
### Visual Description
## Histogram: Reward Score Density Comparison
### Overview
The image is a histogram comparing the density distributions of "Reward Score" for two different models or systems: "Deepseek-R1" and "Gemini Flash Thinking". The chart visualizes how frequently different reward scores occur for each entity.
### Components/Axes
* **Chart Type:** Histogram (overlapping, semi-transparent bars).
* **X-Axis:**
* **Label:** "Reward Score"
* **Scale:** Linear, ranging from 0.0 to 1.0.
* **Major Tick Marks:** 0.0, 0.2, 0.4, 0.6, 0.8, 1.0.
* **Y-Axis:**
* **Label:** "Density"
* **Scale:** Linear, ranging from 0 to 4.
* **Major Tick Marks:** 0, 1, 2, 3, 4.
* **Legend:**
* **Position:** Top-left corner of the plot area.
* **Entry 1:** A blue square labeled "Deepseek-R1".
* **Entry 2:** An orange square labeled "Gemini Flash Thinking".
### Detailed Analysis
The chart displays two distinct, overlapping distributions.
1. **Deepseek-R1 (Blue Distribution):**
* **Trend:** The distribution is heavily right-skewed, with the vast majority of density concentrated between reward scores of approximately 0.55 and 0.95.
* **Key Data Points/Density:**
* The distribution begins with very low density around 0.35.
* Density rises sharply after 0.55.
* The primary peak is located between 0.75 and 0.85, where the density reaches its maximum value of approximately 3.9 (just below the 4.0 mark).
* A secondary, slightly lower peak is visible around 0.80-0.82.
* Density falls off sharply after 0.90, approaching zero near 1.0.
2. **Gemini Flash Thinking (Orange Distribution):**
* **Trend:** The distribution is left-skewed, with the majority of density concentrated between reward scores of approximately 0.05 and 0.50.
* **Key Data Points/Density:**
* The distribution starts with low density near 0.0.
* It rises quickly, forming a broad, multi-modal plateau.
* The highest density region is between 0.15 and 0.30, with multiple local peaks. The maximum density in this range is approximately 3.0.
* Density gradually declines from 0.30 onwards, with a notable smaller peak around 0.40.
* The distribution has a long, low-density tail extending to the right, overlapping with the blue distribution. It becomes negligible after approximately 0.85.
3. **Overlap Region:**
* There is a significant area of overlap between the two distributions, roughly from reward scores of 0.35 to 0.70.
* In this region, the orange bars (Gemini) are generally lower than the rising blue bars (Deepseek). The combined color appears brownish.
* The overlap indicates that both models can produce reward scores in this mid-range, though with different frequencies.
### Key Observations
* **Clear Separation of Peaks:** The central tendency of the two distributions is distinctly separated. Deepseek-R1's scores cluster around ~0.8, while Gemini Flash Thinking's scores cluster around ~0.2.
* **Difference in Spread:** The Gemini Flash Thinking distribution appears wider and more spread out across the lower score range, while the Deepseek-R1 distribution is more tightly concentrated in the high-score range.
* **Asymmetry:** Both distributions are asymmetric. Deepseek-R1 has a sharp drop-off on the high-score side, and Gemini Flash Thinking has a long tail on the high-score side.
* **Maximum Density:** The highest single density value observed is for Deepseek-R1 (~3.9), which is higher than the peak density for Gemini Flash Thinking (~3.0).
### Interpretation
This histogram suggests a fundamental difference in the performance or output characteristics of the two models as measured by the "Reward Score" metric.
* **Performance Implication:** The data strongly indicates that **Deepseek-R1 consistently achieves higher reward scores** than Gemini Flash Thinking. Its distribution is shifted significantly to the right on the x-axis.
* **Model Behavior:** The tight clustering of Deepseek-R1's scores suggests more consistent and predictable high performance on the task generating these rewards. In contrast, Gemini Flash Thinking's wider, left-skewed distribution indicates more variable performance, with a tendency toward lower scores but with occasional instances of mid-to-high scores (the overlap region).
* **Potential Outliers:** The long right tail of the Gemini Flash Thinking distribution (scores > 0.6) could represent outlier cases where this model performs exceptionally well, matching the typical performance range of Deepseek-R1.
* **Underlying Cause:** The separation could be due to differences in model architecture, training data, optimization objectives, or the specific "thinking" process referenced in the name "Gemini Flash Thinking." The chart visualizes the outcome of these differences in terms of the reward signal.
</details>
Figure 5: Score distributions rewarded by ReasonFlux-PRM-7B on Deepseek-R1 and Gemini over 1000 trajectory-response data.
Table 3: Performance of PRMs as reward signals in policy optimization. For each of the two policy models, i.e. DeepSeek-R1-Distill-Qwen-7B and Qwen2.5-7B-Instruct, we run GRPO with three different reward signals: entirely rule-based, Qwen2.5-Math-PRM-7B, and ReasonFlux-PRM. The latter two non-rule-based rewards are factored into the overall reward signal according to Eq. 12. We report the mean accuracy averaged over 16 independent runs.
| Policy Model | Reward Signal Source | AIME24 | AIME25 | MATH500 | GPQA-Diamond |
| --- | --- | --- | --- | --- | --- |
| Qwen2.5-7B-Instruct | Rule-based | 12.9 | 11.1 | 73.6 | 32.7 |
| Qwen2.5-Math-PRM-7B | 12.9 | 13.3 | 74.8 | 32.4 | |
| ReasonFlux-PRM-7B | 16.3 | 17.1 | 77.2 | 34.9 | |
| DeepSeek-R1-Distill-Qwen-7B | Rule-based | 50.2 | 38.3 | 89.6 | 47.1 |
| Qwen2.5-Math-PRM-7B | 51.2 | 40.8 | 92.8 | 49.1 | |
| ReasonFlux-PRM-7B | 54.6 | 44.2 | 94.8 | 51.6 | |
### 5.1 Offline Data Selection
Table 2 presents the supervised fine-tuning results of Qwen2.5-14B-Instruct, with training data selected by different strategies, including ReasonFlux-PRM-7B, baseline PRMs, and human-curated examples. Notably, ReasonFlux-PRM-7B outperforms the high-quality human-curated s1k dataset. Specifically, our model achieves a 6.0% gain on MATH500 and a 6.1% improvement on GPQA-Diamond relative to the human-curated baseline. We also plot the score distribution over the 1,000 trajectory-response pairs generated by Deepseek-R1 and Gemini, as shown in Figure 5. The clearly separated score distributions in the figure demonstrate that ReasonFlux-PRM-7B effectively distinguishes between the trajectory-response quality generated by different models, providing a reliable reward signal for high-quality data selection.
### 5.2 Online Reward Modeling
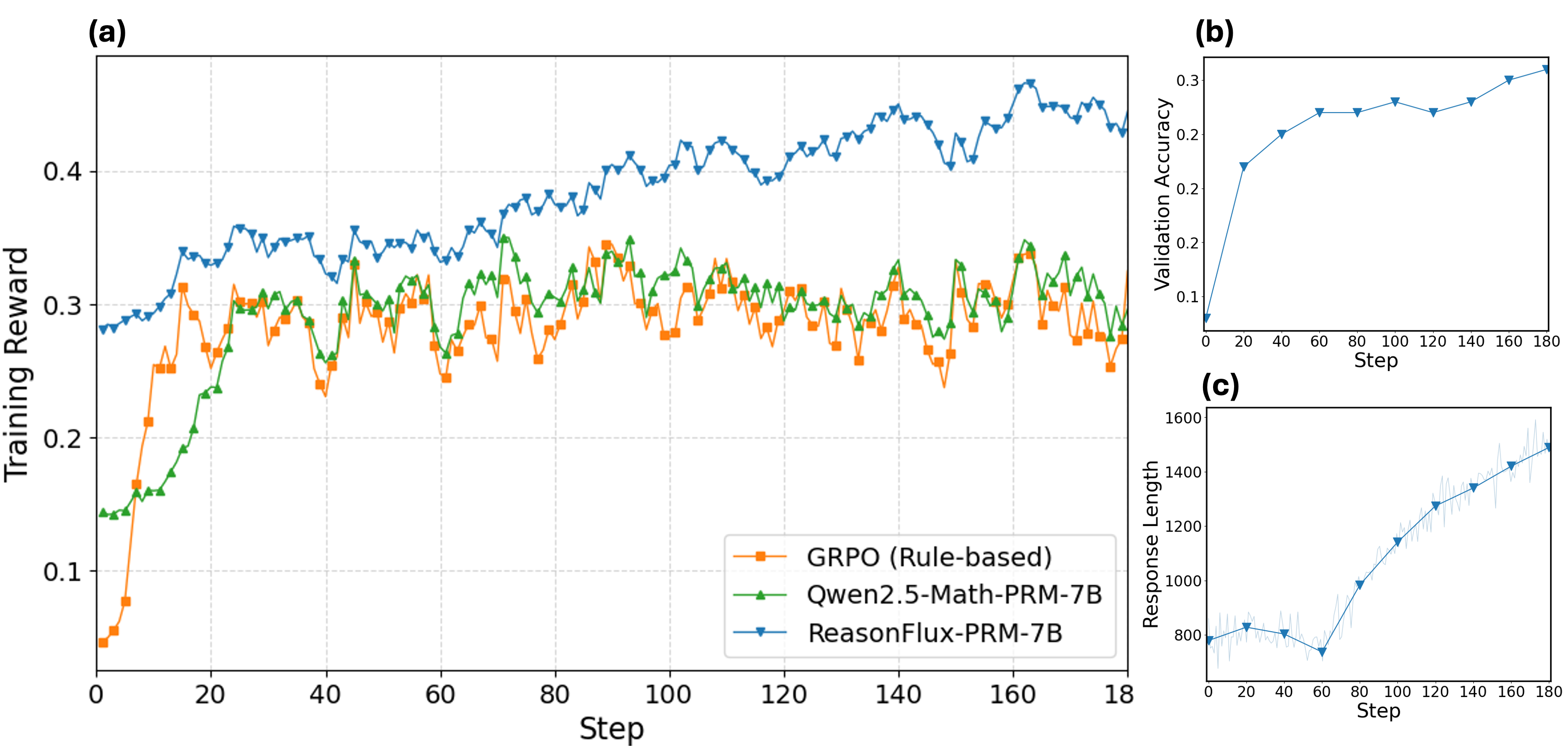
Reward Signal for RL training. Figure 6 and Table 3 present the training dynamics and downstream reasoning performance after incorporating different reward signals into policy optimization via GRPO. We evaluate two 7B-scale policy models: Qwen2.5-7B-Instruct and DeepSeek-R1-Distill-Qwen-7B. For each model, we compare three reward signal sources: a fully rule-based heuristic following the original GRPO approach, Qwen2.5-Math-PRM-7B, and ReasonFlux-PRM-7B. Across both policy models and all evaluated tasks, ReasonFlux-PRM-7B consistently delivers superior gains over both the rule-based and prior PRM-based reward signals. On Qwen2.5-7B-Instruct, ReasonFlux-PRM-7B improves performance by 3.4% on AIME24 and 5.8% on AIME25 relative to the rule-based baseline. On the stronger DeepSeek-R1-Distill-Qwen-7B model, ReasonFlux-PRM-7B further advances results, raising MATH500 accuracy from 89.6% to 94.8% and GPQA-Diamond from 47.1% to 51.6%. In addition, when directly comparing ReasonFlux-PRM-7B against Qwen2.5-Math-PRM-7B, we observe consistent improvements. For example, a 3.8% gain on AIME25 with Qwen2.5-7B-Instruct and a 2.5% gain on GPQA-Diamond with DeepSeek-R1-Distill-Qwen-7B. These results demonstrate that the high-quality learned reward signals from ReasonFlux-PRM substantially enhance policy optimization, outperforming both heuristic and strong PRM baselines, and ultimately yielding more capable reasoning models through RL training.
<details>
<summary>plots/GRPO.png Details</summary>
### Visual Description
## [Composite Line Charts]: Training/Validation Metrics and Response Length for AI Models
### Overview
The image contains three line charts (labeled (a), (b), (c)) analyzing training/validation performance and response length for three AI models: **GRPO (Rule-based)**, **Qwen2.5-Math-PRM-7B**, and **ReasonFlux-PRM-7B**.
### Components/Axes
#### Chart (a): Training Reward vs. Step
- **X-axis**: Step (0–180, major ticks: 0, 20, 40, 60, 80, 100, 120, 140, 160, 180).
- **Y-axis**: Training Reward (0–0.4, major ticks: 0, 0.1, 0.2, 0.3, 0.4).
- **Legend**:
- Orange (square markers): GRPO (Rule-based)
- Green (triangle markers): Qwen2.5-Math-PRM-7B
- Blue (diamond markers): ReasonFlux-PRM-7B
#### Chart (b): Validation Accuracy vs. Step
- **X-axis**: Step (0–180, same as (a)).
- **Y-axis**: Validation Accuracy (0–0.3, major ticks: 0, 0.1, 0.2, 0.3).
- **Line**: Blue (diamond markers, consistent with ReasonFlux-PRM-7B in (a)).
#### Chart (c): Response Length vs. Step
- **X-axis**: Step (0–180, same as (a)).
- **Y-axis**: Response Length (800–1600, major ticks: 800, 1000, 1200, 1400, 1600).
- **Line**: Blue (diamond markers, consistent with ReasonFlux-PRM-7B in (a)/(b)), with a light blue shaded region (likely variance/confidence interval).
### Detailed Analysis
#### Chart (a): Training Reward Trends
- **GRPO (Rule-based, orange)**:
- Starts at ~0.05 (step 0), rises sharply to ~0.3 by step 20, then fluctuates between 0.25–0.35 (e.g., dips at steps 40, 60, 100, 140).
- **Qwen2.5-Math-PRM-7B (green)**:
- Starts at ~0.15 (step 0), rises to ~0.25 by step 20, then fluctuates similarly to GRPO (0.25–0.35) but with slightly less volatility.
- **ReasonFlux-PRM-7B (blue)**:
- Starts at ~0.28 (step 0), rises steadily with fluctuations, reaching ~0.45 by step 180. Consistently outperforms GRPO and Qwen2.5 after step 20.
#### Chart (b): Validation Accuracy Trend
- **ReasonFlux-PRM-7B (blue)**:
- Starts at ~0.05 (step 0), rises to ~0.25 by step 20, then plateaus (0.25–0.3) with a slight increase to ~0.3 by step 180.
#### Chart (c): Response Length Trend
- **ReasonFlux-PRM-7B (blue)**:
- Starts at ~800 (step 0), dips to ~750 at step 60, then rises steadily to ~1500 by step 180. The shaded region indicates variance (e.g., ±50–100 in length).
### Key Observations
1. **Training Reward**: ReasonFlux-PRM-7B achieves the highest training reward, outperforming GRPO and Qwen2.5-Math-PRM-7B.
2. **Validation Accuracy**: ReasonFlux-PRM-7B’s validation accuracy improves with steps, reaching ~0.3 (plateauing after step 20).
3. **Response Length**: ReasonFlux-PRM-7B’s response length increases over training (from ~800 to ~1500), with variance (shaded region).
### Interpretation
- **Training Reward**: ReasonFlux’s higher reward suggests it learns more effectively (or is rewarded more) during training, indicating stronger alignment with the reward signal.
- **Validation Accuracy**: The increasing accuracy implies ReasonFlux generalizes well to unseen data, improving with more training steps.
- **Response Length**: Longer responses over time may reflect the model learning to elaborate (e.g., more detailed reasoning) or the reward signal incentivizing longer outputs.
These trends collectively suggest ReasonFlux-PRM-7B outperforms GRPO and Qwen2.5-Math-PRM-7B in training reward, validation accuracy, and response length evolution.
</details>
Figure 6: Training dynamics of GRPO policy optimization using ReasonFlux-PRM-7B as reward signals and Qwen2.5-7B-Instrct as the policy model. (a) Training reward vs. step: We compare the training reward evolution across original rule-based GRPO, Qwen2.5-Math-PRM-7B, and ReasonFlux-PRM-7B; (b) Validation accuracy vs. step: We report the validation accuracy during training with ReasonFlux-PRM-7B; (c) Response length vs. step: We report the evolution of generated response lengths over training steps with ReasonFlux-PRM-7B.
<details>
<summary>plots/tts.png Details</summary>
### Visual Description
## Line Charts: Accuracy vs. Number of Solutions (N) for Three Datasets (AIME24, MATH500, GPQA-Diamond)
### Overview
The image contains three line charts (subplots) sharing a common legend, illustrating the relationship between the number of solutions ( \( N \), on a logarithmic scale: \( 2^1, 2^2, 2^3, 2^4 \)) and accuracy (in percentage) for four models/approaches: *ReasonFlux-PRM-7B*, *Qwen2.5-Math-PRM-72B*, *Skywork-PRM-7B*, and *Majority*. The subplots correspond to three datasets: **AIME24** (left), **MATH500** (middle), and **GPQA-Diamond** (right).
### Components/Axes
- **Legend (Top Center)**: Four series (color-coded):
- *ReasonFlux-PRM-7B*: Blue solid line
- *Qwen2.5-Math-PRM-72B*: Beige dashed line
- *Skywork-PRM-7B*: Green dashed line
- *Majority*: Red dashed line
- **X-axis (All Subplots)**: *“Number of Solutions (N)”* with ticks at \( 2^1 \) (2), \( 2^2 \) (4), \( 2^3 \) (8), \( 2^4 \) (16) (logarithmic scale).
- **Y-axis (All Subplots)**: *“Accuracy (%)”* with dataset-specific ranges:
- AIME24: ~38–48% (ticks: 40, 44, 48)
- MATH500: ~85–92% (ticks: 86, 88, 90, 92)
- GPQA-Diamond: ~47–55% (ticks: 48, 51, 54)
### Detailed Analysis (Per Subplot)
#### 1. AIME24 (Left Subplot)
- **ReasonFlux-PRM-7B (Blue)**:
- \( N=2^1 \): ~40%
- \( N=2^2 \): ~43%
- \( N=2^3 \): ~46%
- \( N=2^4 \): ~48% (steepest upward trend)
- **Qwen2.5-Math-PRM-72B (Beige)**:
- \( N=2^1 \): ~40%
- \( N=2^2 \): ~43%
- \( N=2^3 \): ~43%
- \( N=2^4 \): ~43% (plateaus after \( N=4 \))
- **Skywork-PRM-7B (Green)**:
- \( N=2^1 \): ~40%
- \( N=2^2 \): ~40%
- \( N=2^3 \): ~43%
- \( N=2^4 \): ~46% (gradual upward trend)
- **Majority (Red)**:
- \( N=2^1 \): ~38%
- \( N=2^2 \): ~40%
- \( N=2^3 \): ~40%
- \( N=2^4 \): ~43% (slow upward trend)
#### 2. MATH500 (Middle Subplot)
- **ReasonFlux-PRM-7B (Blue)**:
- \( N=2^1 \): ~85%
- \( N=2^2 \): ~89%
- \( N=2^3 \): ~90%
- \( N=2^4 \): ~92% (steepest upward trend)
- **Qwen2.5-Math-PRM-72B (Beige)**:
- \( N=2^1 \): ~85%
- \( N=2^2 \): ~87%
- \( N=2^3 \): ~88%
- \( N=2^4 \): ~89% (gradual upward trend)
- **Skywork-PRM-7B (Green)**:
- \( N=2^1 \): ~85%
- \( N=2^2 \): ~85%
- \( N=2^3 \): ~86%
- \( N=2^4 \): ~87% (slow upward trend)
- **Majority (Red)**:
- \( N=2^1 \): ~85%
- \( N=2^2 \): ~86%
- \( N=2^3 \): ~86%
- \( N=2^4 \): ~85% (slight drop at \( N=16 \))
#### 3. GPQA-Diamond (Right Subplot)
- **ReasonFlux-PRM-7B (Blue)**:
- \( N=2^1 \): ~48%
- \( N=2^2 \): ~51%
- \( N=2^3 \): ~54%
- \( N=2^4 \): ~55% (steepest upward trend)
- **Qwen2.5-Math-PRM-72B (Beige)**:
- \( N=2^1 \): ~48%
- \( N=2^2 \): ~50%
- \( N=2^3 \): ~52%
- \( N=2^4 \): ~54% (gradual upward trend)
- **Skywork-PRM-7B (Green)**:
- \( N=2^1 \): ~48%
- \( N=2^2 \): ~48%
- \( N=2^3 \): ~50%
- \( N=2^4 \): ~52% (slow upward trend)
- **Majority (Red)**:
- \( N=2^1 \): ~48%
- \( N=2^2 \): ~47% (drop)
- \( N=2^3 \): ~48%
- \( N=2^4 \): ~50% (recovery and upward trend)
### Key Observations
- **Trend Consistency**: *ReasonFlux-PRM-7B* (blue) consistently shows the steepest upward trend in accuracy with increasing \( N \) across all three datasets.
- **Plateauing/Decline**: *Qwen2.5-Math-PRM-72B* (beige) plateaus in AIME24 after \( N=4 \), while *Majority* (red) shows a slight decline in MATH500 at \( N=16 \) and a drop in GPQA-Diamond at \( N=2 \).
- **Dataset Differences**: MATH500 has the highest overall accuracy (85–92%), while AIME24 and GPQA-Diamond have lower ranges (38–48% and 47–55%, respectively), suggesting varying difficulty or model performance across datasets.
### Interpretation
The charts demonstrate that increasing the number of solutions (\( N \)) generally improves accuracy for most models, with *ReasonFlux-PRM-7B* benefiting the most (steepest slope). This suggests that more solutions (or a larger ensemble) enhance performance, especially for *ReasonFlux*. The plateau in *Qwen2.5-Math-PRM-72B* (AIME24) and decline in *Majority* (MATH500, GPQA-Diamond) may indicate diminishing returns or model-specific limitations with larger \( N \). The dataset-specific accuracy ranges imply that MATH500 is more “solvable” (higher baseline accuracy) than AIME24 and GPQA-Diamond, or that the models are better optimized for MATH500. Overall, the data supports the hypothesis that increasing solution count boosts accuracy, with model-specific and dataset-specific variations in the magnitude of improvement.
</details>
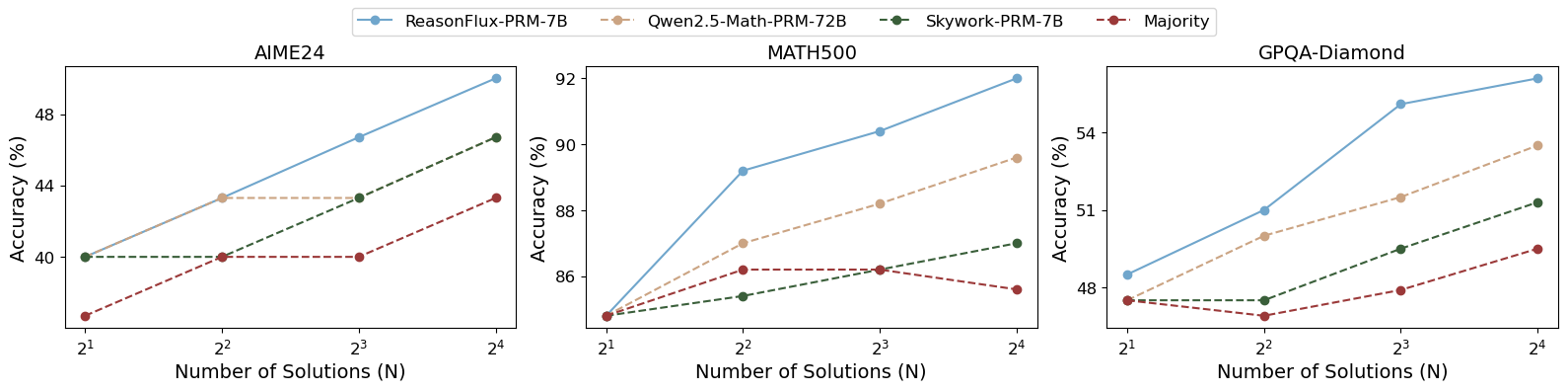
Figure 7: Test-time performance of Best-of-N selection using ReasonFlux-PRM-7B, Qwen2.5-Math-PRM-72B, and Skywork-PRM-7B across reasoning tasks. We also report results using the majority voting method.
<details>
<summary>x2.png Details</summary>
### Visual Description
## [Chart Type]: Dual Scatter Plots with Line Segment - Model Accuracy Analysis
### Overview
The image displays two side-by-side scatter plots comparing the performance of different Process Reward Models (PRMs) on the MATH500 benchmark. Both charts share the same y-axis metric: "Accuracy on MATH500 (%)". The left chart analyzes the impact of training data size, while the right chart analyzes the impact of model parameter size. The overarching title for both plots is "SFT on Qwen2.5-14B-Instruct".
### Components/Axes
**Common Elements:**
* **Main Title (Top of both plots):** "SFT on Qwen2.5-14B-Instruct"
* **Y-Axis (Both plots):** Label: "Accuracy on MATH500 (%)". Scale ranges from 60 to 90+ with major ticks at 60, 70, 80, 90.
* **Horizontal Reference Line:** A dashed gray line at approximately 82% accuracy appears in both plots.
**Left Plot:**
* **X-Axis:** Label: "Number of Training Samples". Scale is logarithmic with labeled ticks at 1000, 5000, 10000, and 590000.
* **Legend (Bottom Right):**
* Blue Circle: "ReasonFlux-PRM-7B"
* Orange Triangle: "Human selected (s1k)"
* Purple Square: "Raw Data (59k)"
**Right Plot:**
* **X-Axis:** Label: "Parameter Size of PRMs". Scale is logarithmic with labeled ticks at 1.5B, 7B, and 72B.
* **Legend (Embedded as labels next to data points):**
* Blue Circle: "ReasonFlux-PRM-7B"
* Orange Triangle: "Qwen2.5-Math-PRM-72B"
* Purple Square: "Skywork-PRM-7B"
* Orange Triangle (smaller): "Qwen2.5-Math-PRM-7B"
* Blue Circle (smaller): "ReasonFlux-PRM-1.5B"
### Detailed Analysis
**Left Chart: Accuracy vs. Training Samples**
* **Trend Verification:**
* **ReasonFlux-PRM-7B (Blue Line):** The line connecting the three blue circles slopes upward, indicating a positive correlation between the number of training samples and accuracy.
* **Human selected (s1k) (Orange Triangle):** Single data point, no trend.
* **Raw Data (59k) (Purple Square):** Single data point, no trend.
* **Data Points (Approximate):**
* **ReasonFlux-PRM-7B:**
* At 1000 samples: ~83.5% accuracy.
* At 5000 samples: ~89.5% accuracy.
* At 10000 samples: ~91.5% accuracy.
* **Human selected (s1k):** At 1000 samples: ~77.5% accuracy.
* **Raw Data (59k):** At 590000 samples: ~79.5% accuracy.
**Right Chart: Accuracy vs. Parameter Size**
* **Trend Verification:** All data series are single points; no lines connect them. The visual arrangement suggests a general upward trend from left to right.
* **Data Points (Approximate):**
* **ReasonFlux-PRM-1.5B (Blue Circle, leftmost):** At 1.5B parameters: ~77.5% accuracy.
* **ReasonFlux-PRM-7B (Blue Circle, center):** At 7B parameters: ~83.5% accuracy.
* **Skywork-PRM-7B (Purple Square, center):** At 7B parameters: ~70.0% accuracy.
* **Qwen2.5-Math-PRM-7B (Orange Triangle, center):** At 7B parameters: ~74.0% accuracy.
* **Qwen2.5-Math-PRM-72B (Orange Triangle, rightmost):** At 72B parameters: ~79.5% accuracy.
### Key Observations
1. **Training Data Efficiency (Left Chart):** The ReasonFlux-PRM-7B model shows significant accuracy gains (from ~83.5% to ~91.5%) when increasing training samples from 1,000 to 10,000. However, using 590,000 samples of "Raw Data" yields lower accuracy (~79.5%) than using only 1,000 samples of "Human selected" data (~77.5%) or the 1,000-sample ReasonFlux model.
2. **Parameter Size vs. Performance (Right Chart):** Among the 7B parameter models, ReasonFlux-PRM-7B (~83.5%) significantly outperforms both Qwen2.5-Math-PRM-7B (~74.0%) and Skywork-PRM-7B (~70.0%).
3. **Scale Comparison:** The largest model shown, Qwen2.5-Math-PRM-72B (~79.5%), performs worse than the much smaller ReasonFlux-PRM-7B (~83.5%) on this specific benchmark, suggesting architecture or training data quality may be more critical than sheer parameter count.
4. **Consistency:** The performance of ReasonFlux-PRM-7B at 1,000 samples is consistent between the two charts (~83.5%).
### Interpretation
The data suggests two key findings for improving model performance on the MATH500 benchmark when using Supervised Fine-Tuning (SFT) on Qwen2.5-14B-Instruct:
1. **Data Quality and Curation Trumps Quantity:** The left chart demonstrates that a small, high-quality, human-selected dataset (s1k) is more effective than a massive, uncurated dataset (59k). Furthermore, the ReasonFlux model's performance scales well with more high-quality data (up to 10k samples), indicating that the training process or data selection method used for ReasonFlux is highly effective.
2. **Model Architecture/Training is a Dominant Factor:** The right chart reveals that at the same parameter size (7B), the ReasonFlux variant achieves substantially higher accuracy than competitors. This implies that the specific design, training procedure, or data used to create ReasonFlux-PRM-7B provides a significant advantage. Its performance even surpasses a model with 10x more parameters (72B), highlighting that efficient use of parameters can be more important than scale alone.
**Overall Implication:** For technical document purposes, these charts argue that investing in sophisticated data curation and model training methodologies (as exemplified by ReasonFlux) yields better returns on the MATH500 benchmark than simply increasing raw data volume or model size. The ReasonFlux-PRM-7B model appears to be a highly efficient and effective choice within this evaluation context.
</details>
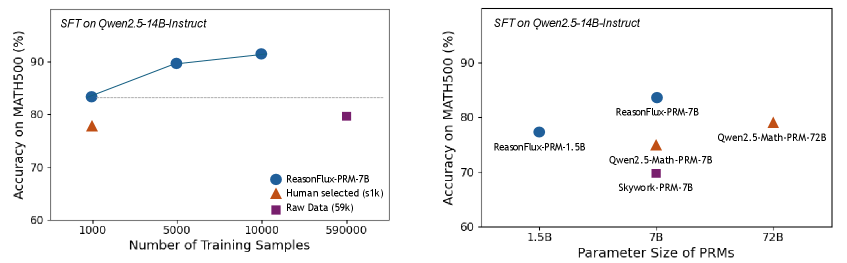
Figure 8: Effeciency Analyses on ReasonFlux-PRM-7B. Left: Accuracy on MATH500 improves steadily as the number of ReasonFlux-PRM-7B selected training samples increases, outperforming both human-selected (1k) and full raw data (59k) baselines with fewer total training instances. Right: ReasonFlux-PRM-7B achieves higher accuracy than other PRMs under 7B scale and even larger 72B scale parameter size.
Best-of-N in Test-Time Scaling. In Figure 7, we present Best-of-N selection results using ReasonFlux-PRM-7B and baseline PRMs across four reasoning tasks. For the generator model, we use the fine-tuned Qwen2.5-14B-Instruct with the same checkpoint in Section 5.1. ReasonFlux-PRM-7B consistently leads to greater accuracy gains as N increases, outperforming all baselines by notable margins. While other PRMs show diminishing or flat returns with increased sampling, ReasonFlux-PRM-7B maintains a strong upward trend, demonstrating its superior ability to identify high-quality reasoning traces.
Additional Performance Analyses. We leave further performance analyses on ReasonFlux-PRM and case studies in Appendix D and Appendix E.
### 5.3 Efficiency Analyses
In this section, we evaluate the efficiency of ReasonFlux-PRM-7B in both offline data selection for SFT and online RL settings by comparing the training performance and overhead under different data and reward supervision strategies.
<details>
<summary>x3.png Details</summary>
### Visual Description
## [Bar Chart Comparison]: Training Time for Two Models Under Two Training Regimes
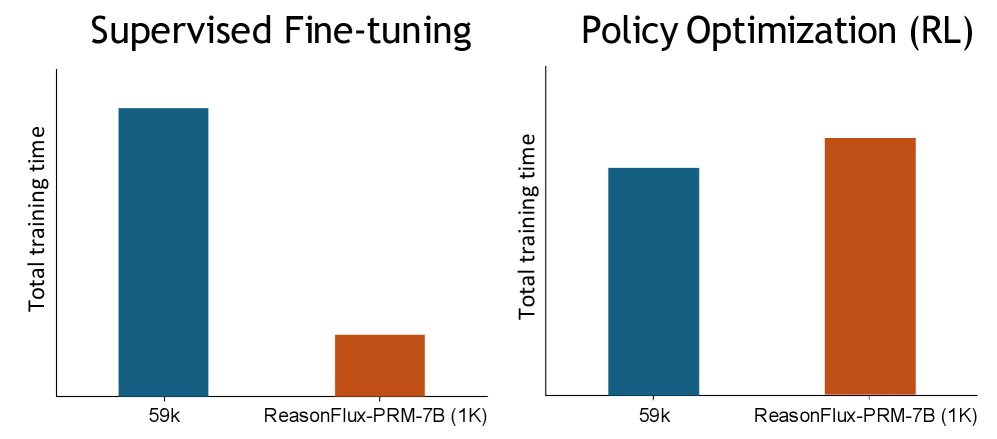
### Overview
The image displays two side-by-side vertical bar charts comparing the "Total training time" for two different models or configurations ("59k" and "ReasonFlux-PRM-7B (1K)") under two distinct training methods: "Supervised Fine-tuning" (left chart) and "Policy Optimization (RL)" (right chart). The charts visually demonstrate a significant reversal in relative training time between the two methods.
### Components/Axes
* **Chart Titles:**
* Left Chart: "Supervised Fine-tuning"
* Right Chart: "Policy Optimization (RL)"
* **Y-Axis (Both Charts):** Labeled "Total training time". The axis has a vertical line but no numerical scale or tick marks, indicating the values are relative.
* **X-Axis (Both Charts):** Contains two categorical labels:
1. "59k"
2. "ReasonFlux-PRM-7B (1K)"
* **Data Series (Color Coding):**
* **Blue Bar:** Corresponds to the "59k" category on the x-axis.
* **Orange Bar:** Corresponds to the "ReasonFlux-PRM-7B (1K)" category on the x-axis.
* **Spatial Layout:** The two charts are positioned horizontally adjacent. The "Supervised Fine-tuning" chart is on the left, and the "Policy Optimization (RL)" chart is on the right. The y-axis label is centered vertically to the left of both charts.
### Detailed Analysis
**Chart 1: Supervised Fine-tuning (Left)**
* **Trend Verification:** The blue bar ("59k") is substantially taller than the orange bar ("ReasonFlux-PRM-7B (1K)").
* **Data Points (Approximate Relative Values):**
* **59k (Blue):** High training time. Let's assign an approximate relative value of **100 units**.
* **ReasonFlux-PRM-7B (1K) (Orange):** Very low training time. Visually, it appears to be roughly **15-20%** of the height of the blue bar, or approximately **15-20 units**.
**Chart 2: Policy Optimization (RL) (Right)**
* **Trend Verification:** The orange bar ("ReasonFlux-PRM-7B (1K)") is taller than the blue bar ("59k").
* **Data Points (Approximate Relative Values):**
* **59k (Blue):** Moderate training time. Visually, it is shorter than its counterpart in the left chart. Approximate relative value: **70 units**.
* **ReasonFlux-PRM-7B (1K) (Orange):** High training time. It is taller than the blue bar in this chart and appears to be roughly **85-90%** of the height of the "59k" bar from the first chart. Approximate relative value: **85-90 units**.
### Key Observations
1. **Reversal of Efficiency:** The most striking observation is the complete inversion of training time between the two methods. The "59k" model is much slower to train under Supervised Fine-tuning but becomes the faster model under Policy Optimization. Conversely, "ReasonFlux-PRM-7B (1K)" is extremely fast to train with Supervised Fine-tuning but becomes the slower model with Policy Optimization.
2. **Magnitude of Difference:** The disparity in training time is more pronounced in the Supervised Fine-tuning regime (a factor of ~5-6x) than in the Policy Optimization regime (a factor of ~1.2-1.3x).
3. **Absolute Training Time:** Under Policy Optimization, both models require a more comparable amount of training time, whereas under Supervised Fine-tuning, their training times are vastly different.
### Interpretation
This data suggests a fundamental trade-off or difference in the computational cost of training these two model types depending on the training paradigm.
* **"59k" Model:** Likely a larger or more complex base model. Supervised Fine-tuning on it is computationally expensive (high time). However, the subsequent Policy Optimization (RL) phase appears to be relatively more efficient for this model, possibly because the fine-tuning already established a strong policy foundation.
* **"ReasonFlux-PRM-7B (1K)" Model:** The "(1K)" likely denotes a smaller dataset or a more specialized, efficient architecture. It is very quick to fine-tune in a supervised manner, suggesting the task is straightforward for it or the model is highly optimized for this step. However, the Policy Optimization phase is disproportionately time-consuming for this model. This could indicate that the RL process is more challenging, requires more samples to converge, or that the model's initial policy after fine-tuning is less optimal for efficient RL improvement.
**In essence, the charts illustrate that the "fastest" model to train is not a fixed property but is critically dependent on the training stage.** Choosing the right model for a task may involve considering not just final performance but also the computational budget for each phase of the training pipeline. The "ReasonFlux-PRM-7B (1K)" offers a very low-cost entry point via supervised fine-tuning, while the "59k" model might be preferable if the primary cost concern is the RL optimization phase.
</details>
Figure 9: Time overhead of ReasonFlux-PRM- during SFT and RL stages. For SFT, we compare the training time using 1k selected samples versus the full 59k raw data. For RL training, we evaluate the overall time with/without incorporating ReasonFlux-PRM-7B.
As shown in Figure 8, the data selected by ReasonFlux-PRM-7B reduces the amount of training data required while achieving superior model performance. When fine-tuning Qwen2.5-14B-Instruct on only 1k samples selected by ReasonFlux-PRM-7B, the model outperforms the baseline trained on 59k raw trajectories by a substantial margin on MATH500. This highlights ReasonFlux-PRM ’s ability to identify high-quality, informative samples that yield greater performance per data point. The result aligns with recent findings on the power of curated supervision in data-efficient post-training, and further shows that ReasonFlux-PRM-7B can outperform even human-selected samples under similar data scales.
We further investigate the overhead of incorporating ReasonFlux-PRM-7B into policy optimization using the GRPO framework. As shown in the right panel of Figure 9, although ReasonFlux-PRM-7B introduces additional computation for step- and trajectory-level reward modeling, the increase in total training time remains moderate compared to standard GRPO. Crucially, this additional cost leads to consistent improvements in downstream reasoning performance, as we demonstrated in our main experiments. Our experiments on both online and offline settings above demonstrate that ReasonFlux-PRM not only improves model performance across both SFT and RL regimes, but does so with minimal computational overhead, achieving superior efficiency in reasoning-centric fine-tuning and optimization pipelines.
### 5.4 Ablation Study
Table 4: Ablation study on the $\alpha$ parameter.
| $\alpha$ | AIME24 | AIME25 | MATH500 |
| --- | --- | --- | --- |
| 0.1 | 26.7 | 6.7 | 81.2 |
| 0.8 | 40.0 | 33.3 | 83.6 |
| 1.0 | 33.3 | 33.3 | 84.8 |
| 1.5 | 33.3 | 40.0 | 83.2 |
Table 5: Ablation study on the $\beta$ parameter.
| $\beta$ | AIME24 | AIME25 | MATH500 |
| --- | --- | --- | --- |
| 0.1 | 10.0 | 6.7 | 73.6 |
| 0.3 | 13.3 | 13.3 | 74.4 |
| 0.5 | 13.3 | 6.7 | 75.2 |
| 0.8 | 20.0 | 16.7 | 76.8 |
Ablation on $\alpha$ . As described in Eq. 11, the parameter $\alpha$ controls the balance between step-level rewards and the trajectory-level reward during ReasonFlux-PRM’s reward aggregation. To assess the impact of this weighting, we conduct an ablation study by varying $\alpha\in\{0.1,0.8,1.0,1.5\}$ , and use ReasonFlux-PRM-7B to select offline fine-tuning data accordingly. The Qwen2.5-14B-Instruct model is then fine-tuned on the top 1,000 selected examples and evaluated across AIME24, AIME25, and MATH500. As shown in Table 5, performance improves when more weight is placed on the trajectory-level reward. Notably, $\alpha=1.0$ achieves the best result on MATH500, while $\alpha=1.5$ yields the highest accuracy on AIME25. These results suggest that combining both local (step-level) and global (trajectory-level) reward signals is essential, and that moderate emphasis on trajectory-level reasoning is particularly beneficial for complex tasks. We also observe that the optimal value of $\alpha$ may be influenced by the underlying data distribution. As part of future work, we plan to make $\alpha$ learnable by introducing a lightweight neural module that dynamically adapts the weight between step-level and trajectory-level rewards based on the characteristics of each input sample.
Ablation on $\beta$ . In Eq. 12, we introduce $\beta$ as a weighting coefficient to balance the original rule-based GRPO reward and the process-level reward provided by ReasonFlux-PRM-7B. To understand its influence, we conduct an ablation study by varying $\beta\in\{0.1,0.3,0.5,0.8\}$ and applying GRPO with ReasonFlux-PRM-7B reward integration on the Qwen2.5-7B-Instruct policy model. As shown in Table 5, we evaluate the resulting models across AIME24, AIME25, and MATH500. The performance consistently improves with increasing $\beta$ , indicating the effectiveness of ReasonFlux-PRM ’s process-level supervision. The highest gains are achieved at $\beta=0.8$ , which yields 20.0% accuracy on AIME24, 16.7% on AIME25, and 76.8% on MATH500. The result demonstrates that a stronger emphasis on ReasonFlux-PRM rewards leads to more effective RL training.
## 6 Related Works
Offline Data Selection for CoT Reasoning at Scale. The quality of data has proven pivotal in the model training process [33, 34]. Recent studies further demonstrate that small subsets of high-quality data can outperform much larger unfiltered datasets in enhancing model reasoning abilities during post-training stages such as supervised fine-tuning [35, 13, 14, 36]. In contrast to online batch data selection methods [37, 38], which select samples based on updated model signals such as gradient norms or maximum sample loss during training, offline data selection approaches aim to select data once prior to the model training process. Motivated by the need for efficiency at scale, recent works have increasingly explored offline data selection as a means of curating high-quality datasets for LLMs training. Beyond simple rejection sampling, these approaches either train an additional model for data selection [39, 40], or adaptively select data based on natural language quality indicators [41], dataset diversity [42], or model-specific quality labels [43, 44]. More recently, model distillation [45, 46] has been widely adopted to leverage longer reasoning traces distilled from large-scale reasoning models as training data for improving the capabilities of downstream smaller models. Methods such as s1 [13], LIMO [14] and ReasonFlux [15] adapt smaller subsets of human-selected high-quality distilled data, enabling smaller models to perform better on sophisticated reasoning tasks compared to training on much larger quantities of raw distilled data. Building on these insights, instead of incurring additional computational costs by focusing solely on training data selection, our work extends the applicability of process reward models from traditional reward supervision to offline data selection, particularly in the context of raw model-distilled chain-of-thought reasoning trajectories [47, 48]. Leveraging the step-by-step supervision capability of PRMs, we utilize them as a metric to select high-quality reasoning traces from raw "silver" distilled data [16], with the goal of improving downstream post-training performance for smaller models.
Process Reward Models. Process Reward Models (PRMs) [5] provide step-level supervision for model reasoning answers, assigning intermediate rewards to each reasoning step [2, 49, 50, 51, 52, 7, 53, 54]. Existing PRMs, such as Math-Shepherd [55], Skywork-PRM [23], and Qwen2.5-Math-PRM series [2], are trained on either human-annotated rewards [5] or synthesized supervision signals [4] to provide fine-grained step-level rewards for model-generated reasoning solutions across different tasks such as math problem solving [18, 56], science reasoning [21], and programming [57]. More recent work such as Think-PRM [9] introduces a generative PRM to produce long CoT verification. Prior works have integrated PRMs as reward signals during training [6, 1, 58, 7], such as step-by-step verified online RL policy optimization [7, 8] or iterative generator improvement through verifier-guided self-training [59]. Others apply PRMs during inference-time scaling [60, 10, 9, 60, 61, 62, 15, 27] by integrating the models with step-level search and decoding strategies, including beam search [60], reward-guided tree search [63], Best-of-N sampling [64], etc. However, since current PRMs are mostly trained on model-generated final solutions, they struggle to provide effective reward supervision for the internal reasoning trajectories produced by large reasoning models [12] prior to generating final answers. To address this, we design a new trajectory-aware PRM specifically aimed at providing reward supervision for such trajectory–response formatted long CoT data.
## 7 Conclusion
We present ReasonFlux-PRM, a trajectory-aware PRM that delivers fine-grained step-level and trajectory-level supervision for trajectory-response long chain-of-thought reasoning traces. Through extensive empirical evaluations, ReasonFlux-PRM consistently improves downstream model performance across multiple challenging benchmarks and application settings. Specifically, ReasonFlux-PRM surpasses strong baselines and human-curated data in offline training data selection, enhances policy optimization during reinforcement learning via dense process-level rewards, and demonstrates superior test-time scaling in Best-of-N inference. Our results highlight the importance of trajectory-aware reward modeling for supervising model intermediate reasoning processes. The discussion of limitations and broader impacts is provided in Appendix F.
## References
- [1] Amrith Setlur, Chirag Nagpal, Adam Fisch, Xinyang Geng, Jacob Eisenstein, Rishabh Agarwal, Alekh Agarwal, Jonathan Berant, and Aviral Kumar. Rewarding progress: Scaling automated process verifiers for llm reasoning. arXiv preprint arXiv:2410.08146, 2024.
- [2] Zhenru Zhang, Chujie Zheng, Yangzhen Wu, Beichen Zhang, Runji Lin, Bowen Yu, Dayiheng Liu, Jingren Zhou, and Junyang Lin. The lessons of developing process reward models in mathematical reasoning. arXiv preprint arXiv:2501.07301, 2025.
- [3] Wendi Li and Yixuan Li. Process reward model with q-value rankings. In The Thirteenth International Conference on Learning Representations, 2025.
- [4] Liangchen Luo, Yinxiao Liu, Rosanne Liu, Samrat Phatale, Meiqi Guo, Harsh Lara, Yunxuan Li, Lei Shu, Yun Zhu, Lei Meng, et al. Improve mathematical reasoning in language models by automated process supervision. arXiv preprint arXiv:2406.06592, 2024.
- [5] Hunter Lightman, Vineet Kosaraju, Yuri Burda, Harrison Edwards, Bowen Baker, Teddy Lee, Jan Leike, John Schulman, Ilya Sutskever, and Karl Cobbe. Let’s verify step by step. In The Twelfth International Conference on Learning Representations, 2024.
- [6] Jonathan Uesato, Nate Kushman, Ramana Kumar, Francis Song, Noah Siegel, Lisa Wang, Antonia Creswell, Geoffrey Irving, and Irina Higgins. Solving math word problems with process-and outcome-based feedback. arXiv preprint arXiv:2211.14275, 2022.
- [7] Xinyu Guan, Li Lyna Zhang, Yifei Liu, Ning Shang, Youran Sun, Yi Zhu, Fan Yang, and Mao Yang. rstar-math: Small llms can master math reasoning with self-evolved deep thinking. arXiv preprint arXiv:2501.04519, 2025.
- [8] Ganqu Cui, Lifan Yuan, Zefan Wang, Hanbin Wang, Wendi Li, Bingxiang He, Yuchen Fan, Tianyu Yu, Qixin Xu, Weize Chen, et al. Process reinforcement through implicit rewards. arXiv preprint arXiv:2502.01456, 2025.
- [9] Muhammad Khalifa, Rishabh Agarwal, Lajanugen Logeswaran, Jaekyeom Kim, Hao Peng, Moontae Lee, Honglak Lee, and Lu Wang. Process reward models that think, 2025.
- [10] Jian Zhao, Runze Liu, Kaiyan Zhang, Zhimu Zhou, Junqi Gao, Dong Li, Jiafei Lyu, Zhouyi Qian, Biqing Qi, Xiu Li, and Bowen Zhou. Genprm: Scaling test-time compute of process reward models via generative reasoning, 2025.
- [11] Aaron Jaech, Adam Kalai, Adam Lerer, Adam Richardson, Ahmed El-Kishky, Aiden Low, Alec Helyar, Aleksander Madry, Alex Beutel, Alex Carney, et al. Openai o1 system card. arXiv preprint arXiv:2412.16720, 2024.
- [12] DeepSeek-AI. Deepseek-r1: Incentivizing reasoning capability in llms via reinforcement learning, 2025.
- [13] Niklas Muennighoff, Zitong Yang, Weijia Shi, Xiang Lisa Li, Li Fei-Fei, Hannaneh Hajishirzi, Luke Zettlemoyer, Percy Liang, Emmanuel Candès, and Tatsunori Hashimoto. s1: Simple test-time scaling, 2025.
- [14] Yixin Ye, Zhen Huang, Yang Xiao, Ethan Chern, Shijie Xia, and Pengfei Liu. Limo: Less is more for reasoning. arXiv preprint arXiv:2502.03387, 2025.
- [15] Ling Yang, Zhaochen Yu, Bin Cui, and Mengdi Wang. Reasonflux: Hierarchical llm reasoning via scaling thought templates. arXiv preprint arXiv:2502.06772, 2025.
- [16] Edward Yeo, Yuxuan Tong, Morry Niu, Graham Neubig, and Xiang Yue. Demystifying long chain-of-thought reasoning in llms. arXiv preprint arXiv:2502.03373, 2025.
- [17] Zhihong Shao, Peiyi Wang, Qihao Zhu, Runxin Xu, Junxiao Song, Xiao Bi, Haowei Zhang, Mingchuan Zhang, Y. K. Li, Y. Wu, and Daya Guo. Deepseekmath: Pushing the limits of mathematical reasoning in open language models, 2024.
- [18] Maxwell-Jia. AIME 2024 dataset. https://huggingface.co/datasets/Maxwell-Jia/AIME_2024, 2024. Accessed: 2025-05-15.
- [19] math ai. AIME 2025 dataset. https://huggingface.co/datasets/math-ai/aime25, 2025. Accessed: 2025-05-15.
- [20] Dan Hendrycks, Collin Burns, Saurav Kadavath, Akul Arora, Steven Basart, Eric Tang, Dawn Song, and Jacob Steinhardt. Measuring mathematical problem solving with the math dataset, 2021.
- [21] David Rein, Betty Li Hou, Asa Cooper Stickland, Jackson Petty, Richard Yuanzhe Pang, Julien Dirani, Julian Michael, and Samuel R. Bowman. Gpqa: A graduate-level google-proof q&a benchmark, 2023.
- [22] Google. Gemini Flash Thinking API. Accessed via the Google Cloud Platform, 2025. Accessed on May 15, 2025.
- [23] Jujie He, Tianwen Wei, Rui Yan, Jiacai Liu, Chaojie Wang, Yimeng Gan, Shiwen Tu, Chris Yuhao Liu, Liang Zeng, Xiaokun Wang, Boyang Wang, Yongcong Li, Fuxiang Zhang, Jiacheng Xu, Bo An, Yang Liu, and Yahui Zhou. Skywork-o1 open series. https://huggingface.co/Skywork, November 2024.
- [24] Lianmin Zheng, Wei-Lin Chiang, Ying Sheng, Siyuan Zhuang, Zhanghao Wu, Yonghao Zhuang, Zi Lin, Zhuohan Li, Dacheng Li, Eric Xing, et al. Judging llm-as-a-judge with mt-bench and chatbot arena. Advances in Neural Information Processing Systems, 36:46595–46623, 2023.
- [25] Zachary Ankner, Mansheej Paul, Brandon Cui, Jonathan D Chang, and Prithviraj Ammanabrolu. Critique-out-loud reward models. arXiv preprint arXiv:2408.11791, 2024.
- [26] Swarnadeep Saha, Xian Li, Marjan Ghazvininejad, Jason Weston, and Tianlu Wang. Learning to plan & reason for evaluation with thinking-llm-as-a-judge. arXiv preprint arXiv:2501.18099, 2025.
- [27] Ling Yang, Zhaochen Yu, Tianjun Zhang, Shiyi Cao, Minkai Xu, Wentao Zhang, Joseph E Gonzalez, and Bin Cui. Buffer of thoughts: Thought-augmented reasoning with large language models. Advances in Neural Information Processing Systems, 37:113519–113544, 2024.
- [28] John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. Proximal policy optimization algorithms. arXiv preprint arXiv:1707.06347, 2017.
- [29] Jian Hu. Reinforce++: A simple and efficient approach for aligning large language models. arXiv preprint arXiv:2501.03262, 2025.
- [30] Qwen Team. Qwen2.5: A party of foundation models, September 2024.
- [31] OpenThoughts Team. Open Thoughts. https://open-thoughts.ai, January 2025.
- [32] An Yang, Baosong Yang, Binyuan Hui, Bo Zheng, Bowen Yu, Chang Zhou, Chengpeng Li, Chengyuan Li, Dayiheng Liu, Fei Huang, Guanting Dong, Haoran Wei, Huan Lin, Jialong Tang, Jialin Wang, Jian Yang, Jianhong Tu, Jianwei Zhang, Jianxin Ma, Jin Xu, Jingren Zhou, Jinze Bai, Jinzheng He, Junyang Lin, Kai Dang, Keming Lu, Keqin Chen, Kexin Yang, Mei Li, Mingfeng Xue, Na Ni, Pei Zhang, Peng Wang, Ru Peng, Rui Men, Ruize Gao, Runji Lin, Shijie Wang, Shuai Bai, Sinan Tan, Tianhang Zhu, Tianhao Li, Tianyu Liu, Wenbin Ge, Xiaodong Deng, Xiaohuan Zhou, Xingzhang Ren, Xinyu Zhang, Xipin Wei, Xuancheng Ren, Yang Fan, Yang Yao, Yichang Zhang, Yu Wan, Yunfei Chu, Yuqiong Liu, Zeyu Cui, Zhenru Zhang, and Zhihao Fan. Qwen2 technical report. arXiv preprint arXiv:2407.10671, 2024.
- [33] Niklas Muennighoff, Alexander Rush, Boaz Barak, Teven Le Scao, Nouamane Tazi, Aleksandra Piktus, Sampo Pyysalo, Thomas Wolf, and Colin A Raffel. Scaling data-constrained language models. Advances in Neural Information Processing Systems, 36:50358–50376, 2023.
- [34] Biao Zhang, Zhongtao Liu, Colin Cherry, and Orhan Firat. When scaling meets llm finetuning: The effect of data, model and finetuning method. arXiv preprint arXiv:2402.17193, 2024.
- [35] Ziche Liu, Rui Ke, Yajiao Liu, Feng Jiang, and Haizhou Li. Take the essence and discard the dross: A rethinking on data selection for fine-tuning large language models. arXiv preprint arXiv:2406.14115, 2024.
- [36] Alon Albalak, Yanai Elazar, Sang Michael Xie, Shayne Longpre, Nathan Lambert, Xinyi Wang, Niklas Muennighoff, Bairu Hou, Liangming Pan, Haewon Jeong, et al. A survey on data selection for language models. arXiv preprint arXiv:2402.16827, 2024.
- [37] Angelos Katharopoulos and François Fleuret. Not all samples are created equal: Deep learning with importance sampling. In International conference on machine learning, pages 2525–2534. PMLR, 2018.
- [38] Jiachen Tianhao Wang, Tong Wu, Dawn Song, Prateek Mittal, and Ruoxi Jia. Greats: Online selection of high-quality data for llm training in every iteration. Advances in Neural Information Processing Systems, 37:131197–131223, 2024.
- [39] Sang Michael Xie, Hieu Pham, Xuanyi Dong, Nan Du, Hanxiao Liu, Yifeng Lu, Percy S Liang, Quoc V Le, Tengyu Ma, and Adams Wei Yu. Doremi: Optimizing data mixtures speeds up language model pretraining. Advances in Neural Information Processing Systems, 36:69798–69818, 2023.
- [40] Mengzhou Xia, Sadhika Malladi, Suchin Gururangan, Sanjeev Arora, and Danqi Chen. Less: Selecting influential data for targeted instruction tuning. arXiv preprint arXiv:2402.04333, 2024.
- [41] Yihan Cao, Yanbin Kang, Chi Wang, and Lichao Sun. Instruction mining: Instruction data selection for tuning large language models, 2024.
- [42] Minghao Wu, Thuy-Trang Vu, Lizhen Qu, and Gholamreza Haffari. The best of both worlds: Bridging quality and diversity in data selection with bipartite graph, 2024.
- [43] Ziche Liu, Rui Ke, Yajiao Liu, Feng Jiang, and Haizhou Li. Take the essence and discard the dross: A rethinking on data selection for fine-tuning large language models, 2025.
- [44] Jiaru Zou, Mengyu Zhou, Tao Li, Shi Han, and Dongmei Zhang. Promptintern: Saving inference costs by internalizing recurrent prompt during large language model fine-tuning. arXiv preprint arXiv:2407.02211, 2024.
- [45] Haoran Li, Qingxiu Dong, Zhengyang Tang, Chaojun Wang, Xingxing Zhang, Haoyang Huang, Shaohan Huang, Xiaolong Huang, Zeqiang Huang, Dongdong Zhang, et al. Synthetic data (almost) from scratch: Generalized instruction tuning for language models. arXiv preprint arXiv:2402.13064, 2024.
- [46] Xiaohan Xu, Ming Li, Chongyang Tao, Tao Shen, Reynold Cheng, Jinyang Li, Can Xu, Dacheng Tao, and Tianyi Zhou. A survey on knowledge distillation of large language models. arXiv preprint arXiv:2402.13116, 2024.
- [47] Murong Yue, Wenlin Yao, Haitao Mi, Dian Yu, Ziyu Yao, and Dong Yu. Dots: Learning to reason dynamically in llms via optimal reasoning trajectories search. arXiv preprint arXiv:2410.03864, 2024.
- [48] Etash Guha, Ryan Marten, Sedrick Keh, Negin Raoof, Georgios Smyrnis, Hritik Bansal, Marianna Nezhurina, Jean Mercat, Trung Vu, Zayne Sprague, Ashima Suvarna, Benjamin Feuer, Liangyu Chen, Zaid Khan, Eric Frankel, Sachin Grover, Caroline Choi, Niklas Muennighoff, Shiye Su, Wanjia Zhao, John Yang, Shreyas Pimpalgaonkar, Kartik Sharma, Charlie Cheng-Jie Ji, Yichuan Deng, Sarah Pratt, Vivek Ramanujan, Jon Saad-Falcon, Jeffrey Li, Achal Dave, Alon Albalak, Kushal Arora, Blake Wulfe, Chinmay Hegde, Greg Durrett, Sewoong Oh, Mohit Bansal, Saadia Gabriel, Aditya Grover, Kai-Wei Chang, Vaishaal Shankar, Aaron Gokaslan, Mike A. Merrill, Tatsunori Hashimoto, Yejin Choi, Jenia Jitsev, Reinhard Heckel, Maheswaran Sathiamoorthy, Alexandros G. Dimakis, and Ludwig Schmidt. Openthoughts: Data recipes for reasoning models, 2025.
- [49] Jonathan Uesato, Nate Kushman, Ramana Kumar, Francis Song, Noah Siegel, Lisa Wang, Antonia Creswell, Geoffrey Irving, and Irina Higgins. Solving math word problems with process- and outcome-based feedback, 2022.
- [50] Dan Zhang, Sining Zhoubian, Ziniu Hu, Yisong Yue, Yuxiao Dong, and Jie Tang. Rest-mcts*: Llm self-training via process reward guided tree search. arXiv preprint arXiv:2406.03816, 2024.
- [51] Amrith Setlur, Chirag Nagpal, Adam Fisch, Xinyang Geng, Jacob Eisenstein, Rishabh Agarwal, Alekh Agarwal, Jonathan Berant, and Aviral Kumar. Rewarding progress: Scaling automated process verifiers for llm reasoning. arXiv preprint arXiv:2410.08146, 2024.
- [52] Chengqi Lyu, Songyang Gao, Yuzhe Gu, Wenwei Zhang, Jianfei Gao, Kuikun Liu, Ziyi Wang, Shuaibin Li, Qian Zhao, Haian Huang, et al. Exploring the limit of outcome reward for learning mathematical reasoning. arXiv preprint arXiv:2502.06781, 2025.
- [53] Yinjie Wang, Ling Yang, Ye Tian, Ke Shen, and Mengdi Wang. Co-evolving llm coder and unit tester via reinforcement learning. arXiv preprint arXiv:2506.03136, 2025.
- [54] Xiusi Chen, Gaotang Li, Ziqi Wang, Bowen Jin, Cheng Qian, Yu Wang, Hongru Wang, Yu Zhang, Denghui Zhang, Tong Zhang, Hanghang Tong, and Heng Ji. Rm-r1: Reward modeling as reasoning, 2025.
- [55] Peiyi Wang, Lei Li, Zhihong Shao, R. X. Xu, Damai Dai, Yifei Li, Deli Chen, Y. Wu, and Zhifang Sui. Math-shepherd: Verify and reinforce llms step-by-step without human annotations, 2024.
- [56] Haipeng Luo, Qingfeng Sun, Can Xu, Pu Zhao, Jianguang Lou, Chongyang Tao, Xiubo Geng, Qingwei Lin, Shifeng Chen, Yansong Tang, and Dongmei Zhang. Wizardmath: Empowering mathematical reasoning for large language models via reinforced evol-instruct, 2025.
- [57] Xinyi He, Jiaru Zou, Yun Lin, Mengyu Zhou, Shi Han, Zejian Yuan, and Dongmei Zhang. CoCoST: Automatic complex code generation with online searching and correctness testing. In Yaser Al-Onaizan, Mohit Bansal, and Yun-Nung Chen, editors, Proceedings of the 2024 Conference on Empirical Methods in Natural Language Processing, pages 19433–19451, Miami, Florida, USA, November 2024. Association for Computational Linguistics.
- [58] Wendi Li and Yixuan Li. Process reward model with q-value rankings. arXiv preprint arXiv:2410.11287, 2024.
- [59] Arian Hosseini, Xingdi Yuan, Nikolay Malkin, Aaron Courville, Alessandro Sordoni, and Rishabh Agarwal. V-star: Training verifiers for self-taught reasoners. arXiv preprint arXiv:2402.06457, 2024.
- [60] Charlie Snell, Jaehoon Lee, Kelvin Xu, and Aviral Kumar. Scaling llm test-time compute optimally can be more effective than scaling model parameters. arXiv preprint arXiv:2408.03314, 2024.
- [61] Jiaru Zou, Qing Wang, Pratyush Thakur, and Nickvash Kani. Stem-pom: Evaluating language models math-symbol reasoning in document parsing. arXiv preprint arXiv:2411.00387, 2024.
- [62] Wenkai Yang, Shuming Ma, Yankai Lin, and Furu Wei. Towards thinking-optimal scaling of test-time compute for llm reasoning. arXiv preprint arXiv:2502.18080, 2025.
- [63] Yangzhen Wu, Zhiqing Sun, Shanda Li, Sean Welleck, and Yiming Yang. Inference scaling laws: An empirical analysis of compute-optimal inference for problem-solving with language models. arXiv preprint arXiv:2408.00724, 2024.
- [64] Runze Liu, Junqi Gao, Jian Zhao, Kaiyan Zhang, Xiu Li, Biqing Qi, Wanli Ouyang, and Bowen Zhou. Can 1b llm surpass 405b llm? rethinking compute-optimal test-time scaling. arXiv preprint arXiv:2502.06703, 2025.
- [65] Jia LI, Edward Beeching, Lewis Tunstall, Ben Lipkin, Roman Soletskyi, Shengyi Costa Huang, Kashif Rasul, Longhui Yu, Albert Jiang, Ziju Shen, Zihan Qin, Bin Dong, Li Zhou, Yann Fleureau, Guillaume Lample, and Stanislas Polu. Numinamath. [https://huggingface.co/AI-MO/NuminaMath-CoT](https://github.com/project-numina/aimo-progress-prize/blob/main/report/numina_dataset.pdf), 2024.
- [66] Yujia Li, David Choi, Junyoung Chung, Nate Kushman, Julian Schrittwieser, Rémi Leblond, Tom Eccles, James Keeling, Felix Gimeno, Agustin Dal Lago, Thomas Hubert, Peter Choy, Cyprien de Masson d’Autume, Igor Babuschkin, Xinyun Chen, Po-Sen Huang, Johannes Welbl, Sven Gowal, Alexey Cherepanov, James Molloy, Daniel Mankowitz, Esme Sutherland Robson, Pushmeet Kohli, Nando de Freitas, Koray Kavukcuoglu, and Oriol Vinyals. Competition-level code generation with alphacode. arXiv preprint arXiv:2203.07814, 2022.
- [67] Guohao Li, Hasan Abed Al Kader Hammoud, Hani Itani, Dmitrii Khizbullin, and Bernard Ghanem. Camel: Communicative agents for "mind" exploration of large scale language model society, 2023.
- [68] Qiying Yu, Zheng Zhang, Ruofei Zhu, Yufeng Yuan, Xiaochen Zuo, Yu Yue, Tiantian Fan, Gaohong Liu, Lingjun Liu, Xin Liu, et al. Dapo: An open-source llm reinforcement learning system at scale. arXiv preprint arXiv:2503.14476, 2025.
- [69] Leandro von Werra, Younes Belkada, Lewis Tunstall, Edward Beeching, Tristan Thrush, Nathan Lambert, Shengyi Huang, Kashif Rasul, and Quentin Gallouédec. TRL: Transformer Reinforcement Learning.
Table of Contents
1. 1 Introduction
1. 2 Preliminaries
1. 3 Existing PRMs Are Not Prepared for Rewarding Thinking Trajectories
1. 4 ReasonFlux-PRM
1. 4.1 How Should We Define Process Rewards and Why?
1. 4.2 Offline Data Selection and Online Reward Modeling
1. 5 Empirical Evaluations
1. 5.1 Offline Data Selection
1. 5.2 Online Reward Modeling
1. 5.3 Efficiency Analyses
1. 5.4 Ablation Study
1. 6 Related Works
1. 7 Conclusion
1. A Details on the Preliminary Study in Section 3
1. A.1 Preliminary Study Setups
1. A.2 Difference between Model Thinking Trajectories and Final Responses
1. B Template guided trajectory-level reward design
1. C Additional Experimental Setups
1. C.1 ReasonFlux-PRM Training
1. C.2 Downstream Tasks
1. D Additional Analyses
1. D.1 Scaling up ReasonFlux-PRM Model Size on Policy Optimization
1. D.2 End-to-End Training with ReasonFlux-PRM (SFT+RL)
1. E Case Study on ReasonFlux-PRM
1. F Limitations and Broader Impacts
## Appendix A Details on the Preliminary Study in Section 3
### A.1 Preliminary Study Setups
Process Reward Models. We evaluate four state-of-the-art process reward models for scoring the quality of the thinking trajectories data: Math-Shepherd-PRM-8B [55], Skywork-PRM-7B [23], Qwen2.5-Math-PRM-7B [2], and Qwen2.5-Math-PRM-72B [2]. The details description for each model is shown below:
- Math-Shepherd-PRM-8B [55]: A 7B PRM based on Mistral, trained with data auto-generated from Mistral-7B fine-tuned on MetaMath. It emphasizes verification of step-level reasoning through process-level rewards without human annotations.
- Skywork-PRM-7B [23]: A PRM built on Qwen2.5-Math-7B-Instruct and trained on data derived from LLaMA-2 fine-tuned on math tasks. It shows strong generalization for verifying reasoning trajectories across models and supports efficient TTS with low inference overhead.
- Qwen2.5-Math-PRM-7B [2]: Trained on Qwen2.5-Math-7B-Instruct using data from the Qwen2.5-Math series, this PRM offers robust step-by-step reward signals and high compatibility with Qwen family models, demonstrating superior supervision ability in TTS tasks among 7B-scale PRMs.
- Qwen2.5-Math-PRM-72B [2]: A high-capacity verifier trained on Qwen2.5-Math-72B-Instruct and Qwen-generated data. It achieves state-of-the-art process supervision and excels in guiding both sampling- and search-based TTS strategies across a range of mathematical reasoning tasks.
Data Sources. For the data sources, we follow s1k [13] to use its collected datasets consisting of 59K raw model thinking trajectories distilled from the Google Gemini Flash Thinking API [22], along with 1K human-curated samples from the same source and an additional 1K human-curated samples from Deepseek-R1 [12]. These trajectories span a broad range of topics, including math and scientific reasoning. For downstream tasks, we choose 4 challenging benchmarks including: AIME24 [18], AIME25 [19], MATH500 [20], and GPQA-Diamond [21].
Training Details in RQ2. As the downstream generator, we adopt Qwen2.5-14B-Instruct as our base model for fine-tuning evaluation. We perform supervised fine-tuning on the Qwen2.5-14B-Instruct model using various 1,000-sample training datasets, each selected either by different PRM-based rankings or curated by human annotators in s1k [13]. We fine-tune the model for 5 epochs using a learning rate of $1\text{e}^{-5}$ , weight decay of $1\text{e}^{-4}$ , and a maximum sequence length of 32,768. All experiments are conducted on a server node with 8 A100-80G GPUs.
### A.2 Difference between Model Thinking Trajectories and Final Responses
As we mentioned in Section 3, there are two key difference of the data between model thinking trajectories and final responses:
- Branching steps across thinking trajectories: For instance, the thinking trajectories might initially assume an incorrect variable assignment in a math problem, detect the inconsistency, and backtrack to re-derive the solution.
- Weaker global coherence across steps: This manifests in speculative or uncertain statements (e.g., “if we assume X, then Y”) that may not resolve within the same reasoning path, and in disjointed or redundant logic, such as repeating subgoals or prematurely concluding without fully integrating prior steps. In contrast, final responses are typically globally fluent and logically unified, aiming to deliver a streamlined and conclusive answer.
In Examples 1 and 2 below, we provide detailed data examples that highlight the distinctions between model thinking trajectories and final output responses. These examples showcase how the thinking trajectories often contain exploratory, speculative, or partially resolved reasoning steps, in contrast to the more polished and coherent final outputs. To better illustrate these differences, we highlight all branching steps, backtracking behaviors, and internal deliberations in blue, emphasizing the non-linear and less deterministic nature of the model’s intermediate reasoning process.
Example 1
Question: Two capacitors with capacitance values $C_{1}=2000\pm 10\penalty 10000\ \mathrm{pF}$ and $C_{2}=3000\pm 15\penalty 10000\ \mathrm{pF}$ are connected in series. The voltage applied across this combination is $V=5.00\pm 0.02\penalty 10000\ \mathrm{V}$ . What is the percentage error in the calculation of the energy stored in this combination of capacitors? Thinking Trajectories: Let $C_{1}$ and $C_{2}$ be the capacitance values of the two capacitors, and $\Delta C_{1}$ , $\Delta C_{2}$ be their absolute errors. Given: $C_{1}=2000\pm 10\penalty 10000\ \mathrm{pF}$ $C_{2}=3000\pm 15\penalty 10000\ \mathrm{pF}$ Voltage applied across the combination, $V=5.00\pm 0.02\penalty 10000\ \mathrm{V}$ When capacitors are connected in series, the equivalent capacitance $C_{\text{eq}}$ is given by: $\frac{1}{C_{\text{eq}}}=\frac{1}{C_{1}}+\frac{1}{C_{2}}\Rightarrow C_{\text{eq}}=\frac{C_{1}C_{2}}{C_{1}+C_{2}}$ Let me double check, initially I thought the formula was $C_{1}+C_{2}$ , but that’s for parallel combination. Since it’s in series, we should use the reciprocal formula. Calculate the nominal value: $C_{\text{eq}}=\frac{2000\times 3000}{2000+3000}=\frac{6\times 10^{6}}{5000}=1200\penalty 10000\ \mathrm{pF}$ To find the error in $C_{\text{eq}}$ , we use: $\Delta C_{\text{eq}}=\sqrt{\left(\frac{\partial C_{\text{eq}}}{\partial C_{1}}\Delta C_{1}\right)^{2}+\left(\frac{\partial C_{\text{eq}}}{\partial C_{2}}\Delta C_{2}\right)^{2}}$ Partial derivatives: $\frac{\partial C_{\text{eq}}}{\partial C_{1}}=\frac{C_{2}^{2}}{(C_{1}+C_{2})^{2}},\quad\frac{\partial C_{\text{eq}}}{\partial C_{2}}=\frac{C_{1}^{2}}{(C_{1}+C_{2})^{2}}$ Evaluate: $\frac{9}{25},\quad\frac{4}{25}$ $\displaystyle\Delta C_{\text{eq}}$ $\displaystyle=\sqrt{\left(\frac{9}{25}\times 10\right)^{2}+\left(\frac{4}{25}\times 15\right)^{2}}=\frac{1}{25}\sqrt{90^{2}+60^{2}}$ $\displaystyle=\frac{1}{25}\sqrt{8100+3600}=\frac{1}{25}\sqrt{11700}\approx 4.33\penalty 10000\ \mathrm{pF}$ Hmm, but is this the only way? Maybe logarithmic differentiation would give a cleaner expression? Let me try an alternative method: $\frac{1}{C_{\text{eq}}}=\frac{1}{C_{1}}+\frac{1}{C_{2}}\Rightarrow-\frac{1}{C_{\text{eq}}^{2}}dC_{\text{eq}}=-\frac{1}{C_{1}^{2}}dC_{1}-\frac{1}{C_{2}^{2}}dC_{2}$ So: $\frac{dC_{\text{eq}}}{C_{\text{eq}}^{2}}=\frac{dC_{1}}{C_{1}^{2}}+\frac{dC_{2}}{C_{2}^{2}}\Rightarrow\frac{\Delta C_{\text{eq}}}{C_{\text{eq}}}=C_{\text{eq}}\left(\frac{\Delta C_{1}}{C_{1}^{2}}+\frac{\Delta C_{2}}{C_{2}^{2}}\right)$ This seems messier, maybe it is generalizable. Now let me compute it: $=\frac{3000\cdot 10}{2000\cdot 5000}+\frac{2000\cdot 15}{3000\cdot 5000}=0.003+0.002=0.005\Rightarrow\Delta C_{\text{eq}}=0.005\cdot 1200=6\penalty 10000\ \mathrm{pF}$ Now compute energy: $E=\frac{1}{2}C_{\text{eq}}V^{2}$ Let me double-check: voltage is squared here, so the error contribution from voltage gets doubled in fractional terms. Fractional error: $\frac{\Delta E}{E}=\frac{\Delta C_{\text{eq}}}{C_{\text{eq}}}+2\cdot\frac{\Delta V}{V}=0.005+2\cdot 0.004=0.013\Rightarrow\text{Percentage error}=1.3\$ Alternative verification might help… I might try distribute the weight of errors proportionally: $\frac{\Delta C_{\text{eq}}}{C_{\text{eq}}}=\frac{\Delta C_{1}}{C_{1}}\cdot\frac{C_{2}}{C_{1}+C_{2}}+\frac{\Delta C_{2}}{C_{2}}\cdot\frac{C_{1}}{C_{1}+C_{2}}=0.005\cdot 0.6+0.005\cdot 0.4=0.005$ Let me Final check: $\ln E=\ln\left(\frac{1}{2}\right)+\ln C_{\text{eq}}+2\ln V\Rightarrow\frac{\Delta E}{E}=\frac{\Delta C_{\text{eq}}}{C_{\text{eq}}}+2\cdot\frac{\Delta V}{V}$ The final answer is: $\Rightarrow\boxed{1.3\$ Final Response: Step 1: Calculate the Equivalent Capacitance When capacitors are connected in series, the equivalent capacitance $C_{\text{eq}}$ is given by: $\frac{1}{C_{\text{eq}}}=\frac{1}{C_{1}}+\frac{1}{C_{2}}=\frac{C_{1}+C_{2}}{C_{1}C_{2}}\quad\Rightarrow\quad C_{\text{eq}}=\frac{C_{1}C_{2}}{C_{1}+C_{2}}$ $C_{\text{eq}}=\frac{2000\times 3000}{2000+3000}=\frac{6\times 10^{6}}{5000}=1200\penalty 10000\ \mathrm{pF}$ Step 2: Calculate the Error in $C_{\text{eq}}$ Using the formula for propagation of uncertainty: $\Delta C_{\text{eq}}=\left|\frac{\partial C_{\text{eq}}}{\partial C_{1}}\right|\Delta C_{1}+\left|\frac{\partial C_{\text{eq}}}{\partial C_{2}}\right|\Delta C_{2}$ Compute the partial derivatives: $\frac{\partial C_{\text{eq}}}{\partial C_{1}}=\frac{C_{2}^{2}}{(C_{1}+C_{2})^{2}},\quad\frac{\partial C_{\text{eq}}}{\partial C_{2}}=\frac{C_{1}^{2}}{(C_{1}+C_{2})^{2}}$ Substitute the given values: $\frac{\partial C_{\text{eq}}}{\partial C_{1}}=\frac{3000^{2}}{5000^{2}}=\frac{9}{25},\quad\frac{\partial C_{\text{eq}}}{\partial C_{2}}=\frac{2000^{2}}{5000^{2}}=\frac{4}{25}$ Now compute the error: $\Delta C_{\text{eq}}=\frac{9}{25}\cdot 10+\frac{4}{25}\cdot 15=\frac{90}{25}+\frac{60}{25}=\frac{150}{25}=6\penalty 10000\ \mathrm{pF}$ Step 3: Compute the Fractional Error in $C_{\text{eq}}$ $\frac{\Delta C_{\text{eq}}}{C_{\text{eq}}}=\frac{6}{1200}=0.005$ Step 4: Energy Stored in the Capacitor System The energy stored in a capacitor is given by: $E=\frac{1}{2}C_{\text{eq}}V^{2}$ Step 5: Propagate Error in Energy Calculation The fractional error in energy $E$ is: $\frac{\Delta E}{E}=\frac{\Delta C_{\text{eq}}}{C_{\text{eq}}}+2\cdot\frac{\Delta V}{V}$ Given: $\frac{\Delta C_{\text{eq}}}{C_{\text{eq}}}=0.005,\quad\frac{\Delta V}{V}=\frac{0.02}{5.00}=0.004$ Substitute into the error formula: $\frac{\Delta E}{E}=0.005+2\cdot 0.004=0.005+0.008=0.013$ Step 6: Convert to Percentage Error $\text{Percentage error}=\frac{\Delta E}{E}\times 100\$ Final Answer: The percentage error in the energy stored is $\boxed{1.3\$ .
Example 2
Question: One base of a trapezoid is $100$ units longer than the other base. The segment that joins the midpoints of the legs divides the trapezoid into two regions whose areas are in the ratio $2:3$ . Let $x$ be the length of the segment, parallel to the bases, that divides the trapezoid into two regions of equal area. Find the greatest integer that does not exceed $\dfrac{x^{2}}{100}$ . Thinking Trajectories: The problem asks for the value of $\lfloor x^{2}/100\rfloor$ , where $x$ is the length of a segment parallel to the bases that divides the trapezoid into two regions of equal area. We are given information about the lengths of the bases and the ratio of the areas created by the segment joining the midpoints of the legs. Let the lengths of the two bases be $b_{1}$ and $b_{2}$ , with $b_{1}>b_{2}$ . We are told that: $b_{1}=b_{2}+100$ Let the height of the trapezoid be $h$ . The midline of the trapezoid has length: $m=\frac{b_{1}+b_{2}}{2}$ It divides the trapezoid into two smaller trapezoids, each of height $h/2$ . The area of the upper trapezoid is: $A_{1}=\frac{1}{2}(b_{2}+m)\cdot\frac{h}{2}=\frac{h}{8}(b_{1}+3b_{2})$ The area of the lower trapezoid is: $A_{2}=\frac{1}{2}(b_{1}+m)\cdot\frac{h}{2}=\frac{h}{8}(3b_{1}+b_{2})$ We are told that the ratio of areas is $2:3$ (upper to lower), so: $\frac{A_{1}}{A_{2}}=\frac{b_{1}+3b_{2}}{3b_{1}+b_{2}}=\frac{2}{3}\Rightarrow 3(b_{1}+3b_{2})=2(3b_{1}+b_{2})\Rightarrow 3b_{1}+9b_{2}=6b_{1}+2b_{2}\Rightarrow 7b_{2}=3b_{1}$ Substitute $b_{1}=b_{2}+100$ : $7b_{2}=3(b_{2}+100)\Rightarrow 7b_{2}=3b_{2}+300\Rightarrow 4b_{2}=300\Rightarrow b_{2}=75\Rightarrow b_{1}=175$ Let me also test the other case just in case it’s a typo, what if the area ratio was actually $3:2$ ? $\displaystyle\frac{b_{1}+3b_{2}}{3b_{1}+b_{2}}=\frac{3}{2}$ $\displaystyle\Rightarrow 2(b_{1}+3b_{2})=3(3b_{1}+b_{2})\Rightarrow 2b_{1}+6b_{2}=9b_{1}+3b_{2}\Rightarrow 3b_{2}=7b_{1}$ $\displaystyle\Rightarrow 3b_{2}=7(b_{2}+100)\Rightarrow 3b_{2}=7b_{2}+700\Rightarrow-4b_{2}=700\Rightarrow b_{2}=-175$ That’s invalid as the length can’t be negative. So the correct ratio is $2:3$ and $b_{2}=75$ , $b_{1}=175$ . Now consider a segment of length $x$ , parallel to the bases, that divides the trapezoid into two equal-area regions. Let the height from $b_{2}$ up to this segment be $h^{\prime}$ . The total area is: $A_{\text{total}}=\frac{1}{2}(b_{1}+b_{2})h=\frac{1}{2}(175+75)h=125h$ We want: $\frac{1}{2}(b_{2}+x)h^{\prime}=\frac{125h}{2}\Rightarrow(b_{2}+x)h^{\prime}=125h$ We also know from similar triangles: $\frac{x-b_{2}}{h^{\prime}}=\frac{b_{1}-b_{2}}{h}\Rightarrow\frac{h^{\prime}}{h}=\frac{x-b_{2}}{b_{1}-b_{2}}$ Substitute into the area equation: $(b_{2}+x)\cdot h\cdot\frac{x-b_{2}}{b_{1}-b_{2}}=125h\Rightarrow(b_{2}+x)(x-b_{2})=125(b_{1}-b_{2})$ $x^{2}-b_{2}^{2}=125(b_{1}-b_{2})\Rightarrow x^{2}=125(b_{1}-b_{2})+b_{2}^{2}$ Substitute $b_{1}=175$ , $b_{2}=75$ : $x^{2}=125(100)+75^{2}=12500+5625=18125\Rightarrow\left\lfloor\frac{x^{2}}{100}\right\rfloor=\left\lfloor\frac{18125}{100}\right\rfloor=\boxed{181}$ I also saw a different derivation that leads directly to this result. Let me verify it: $2x^{2}=b_{1}^{2}+b_{2}^{2}\Rightarrow x^{2}=\frac{b_{1}^{2}+b_{2}^{2}}{2}\Rightarrow x^{2}=\frac{175^{2}+75^{2}}{2}=\frac{30625+5625}{2}=18125\Rightarrow\left\lfloor\frac{x^{2}}{100}\right\rfloor=\boxed{181}$ Final Response: Step 1: Set up variables and use the area ratio condition Let the lengths of the two bases of the trapezoid be $b_{1}$ and $b_{2}$ , with $b_{1}>b_{2}$ . We are given that $b_{1}=b_{2}+100$ . The segment that joins the midpoints of the legs (the midline) divides the trapezoid into two smaller trapezoids with heights $h/2$ . The lengths of the parallel sides of the upper trapezoid are $b_{2}$ and $m=\frac{b_{1}+b_{2}}{2}$ , and its area is $A_{1}=\frac{h}{8}(b_{1}+3b_{2}).$ The lengths of the parallel sides of the lower trapezoid are $m$ and $b_{1}$ , and its area is $A_{2}=\frac{h}{8}(3b_{1}+b_{2}).$ The ratio of the areas is $A_{1}:A_{2}=(b_{1}+3b_{2}):(3b_{1}+b_{2})$ . Given that this ratio is $2:3$ or $3:2$ . If $\frac{b_{1}+3b_{2}}{3b_{1}+b_{2}}=\frac{2}{3},$ then $3b_{1}+9b_{2}=6b_{1}+2b_{2},$ , so $7b_{2}=3b_{1}.$ Substituting $b_{1}=b_{2}+100$ , we get $7b_{2}=3(b_{2}+100),$ so $4b_{2}=300,\quad b_{2}=75,\quad\text{and}\quad b_{1}=175.$ Step 2: Verify the alternate area ratio leads to contradiction If $\frac{b_{1}+3b_{2}}{3b_{1}+b_{2}}=\frac{3}{2},$ we get $2b_{1}+6b_{2}=9b_{1}+3b_{2},$ so $3b_{2}=7b_{1},$ which leads to a negative value for $b_{2}$ , which is impossible. The lengths of the bases are $b_{1}=175$ and $b_{2}=75$ . Step 3: Express the condition for equal-area division Let the segment of length $x$ parallel to the bases divide the trapezoid into two regions of equal area. The square of the length of such a segment is given by $x^{2}=\frac{b_{1}^{2}+b_{2}^{2}}{2}.$ $x^{2}=\frac{175^{2}+75^{2}}{2}=\frac{30625+5625}{2}=\frac{36250}{2}=18125.$ Step 4: Compute the final result We need to find the greatest integer that does not exceed $x^{2}/100$ . $\frac{x^{2}}{100}=\frac{18125}{100}=181.25.$ The greatest integer that does not exceed $181.25$ is $\lfloor 181.25\rfloor=181.$ Final Answer: The final answer is $\boxed{181}$ .
## Appendix B Template guided trajectory-level reward design
Prompt Design of the Template (LLM-as-a-Verifier)
You are given a long chain-of-thought (CoT) response to a challenging math problem. Your task is to summarize the response into a structured sequence of reasoning steps that can serve as a clear and guided template for use by a smaller model. Problem: [problem] Response: [response] Instructions: Please summarize the response as a concise list of reasoning steps, each capturing a distinct part of the thought process. These may include restating the problem, defining variables, constructing mathematical models, performing calculations, verifying results, handling different cases, correcting mistakes, and drawing the final conclusion. Focus on preserving the logical flow while keeping each step clear and concise. Here are a few template examples you should strictly follow: [Template Example 1] [Template Example 2] [Template Example 3] Write your answer below.
## Appendix C Additional Experimental Setups
### C.1 ReasonFlux-PRM Training
For ReasonFlux-PRM training, we initialize from the off-the-shelf Qwen2.5-1.5B-Instruct and Qwen2.5-7B-Instruct models [30], serving as our 1.5B-scale and 7B-scale ReasonFlux-PRM backbones. We then train ReasonFlux-PRM on the OpenThoughts-114K [31] collection of datasets containing rich, model-generated thinking trajectories paired with their corresponding final responses.
OpenThoughts-114k is a publicly available synthetic reasoning dataset comprising 114,000 high-quality examples across four domains: mathematics, science, code, and puzzles. Each example includes a problem statement, a thinking trajectory generated by the Deepseek-R1, and a corresponding model response. The dataset was constructed by curating prompts from existing datasets, such as AI-MO/NuminaMath-CoT [65] for math, DeepMind/code-contests [66] for code, and camel-ai/chemistry [67] for science. We utilize the model-generated thinking trajectories and final responses from the datasets as raw training data. Subsequently, we assign step-level and trajectory-level rewards based on our specific reward design, as detailed in Section 4.1.
We follow our detailed description in Section 4.1 to train with the step-level reward. In addition, to train with the template-guided trajectory-level reward, we first randomly sample 1000 problem-response samples from OpenThoughts-114k, and prompt GPT-4o to extract the reasoning template from each CoT sample using the prompt in Section B. For each problem-template pair, we choose Qwen2.5-7B-Instruct as our generator $\pi_{\theta}$ and generate $N=5$ responses that attempt to solve the problem while adhering to the reasoning template. The ground truth trajectory-level reward is then computed as the average accuracy across the 5 responses, as shown in Eq. 9. We then combine the step-level and trajectory-level rewards to obtain the ground truth reward values for the 1000 samples, and train ReasonFlux-PRM to learn these reward values using the joint training objective in Eq. 10. To train our reward model, we use a learning rate of 1e-5 and train for 3 epochs.
### C.2 Downstream Tasks
For offline data selection and subsequent supervised fine-tuning, we follow the exact experimental setup described in Appendix A.1 to ensure a fair comparison with baseline models. Specifically, we begin by assigning reward scores to each trajectory–response pair in OpenThoughts-114k using the designated reward model. We then rank all samples based on their aggregated reward scores and select the top 1,000 examples to serve as the training set for downstream fine-tuning.
For online policy optimization, we use a training dataset comprising 10k competition-level mathematical reasoning problems collected from MATH [20] and the DAPO [68] training set. These training data contains math problems spanning a wide range of topics, including algebra, geometry, probability, and precalculus. Our GRPO training framework is built on the original Hugging Face GRPO Trainer [69]. We train with a batch size of 32, generating 6 samples per prompt, and run training for 3 epochs. As mentioned above, the vanilla GRPO relies on a rule-based reward that evaluates only the correctness of the final answer. On the other hand, we replace the rule-based reward with the learned reward signal obtained by passing the training prompt and the policy model’s output through ReasonFlux-PRM.
For the Best-of-N test-time scaling experiments, we use Qwen2.5-14B-Instruct as the generator model. Given an input problem $x$ , the generator produces $N$ candidate reasoning trajectories using nucleus sampling with temperature $T=0.3$ , where $N\in\{2,4,8,16\}$ . Each candidate trajectory is then scored by ReasonFlux-PRM, which provides a scalar reward reflecting the trajectory’s quality in terms of correctness, coherence, and reasoning structure. The final output is selected as the trajectory with the highest ReasonFlux-PRM assigned reward. We evaluate performance by measuring final-answer accuracy over the selected outputs.
## Appendix D Additional Analyses
### D.1 Scaling up ReasonFlux-PRM Model Size on Policy Optimization
Table 6: Scaling Effects of ReasonFlux-PRM model size on GRPO online policy optimization performance. Larger ReasonFlux-PRM reward models (7B vs. 1.5B) consistently yield better downstream performance on MATH500 and GPQA-Diamond across both Qwen2.5-7B-Instruct and DeepSeek-R1-Distill-Qwen-7B policy models.
| Policy Model | ReasonFlux-PRM Size | MATH500 | GPQA-Diamond |
| --- | --- | --- | --- |
| Qwen2.5-7B-Instruct | 1.5B | 73.8 | 30.8 |
| 7B | 77.6 | 34.3 | |
| DeepSeek-R1-Distill-Qwen-7B | 1.5B | 90.4 | 48.5 |
| 7B | 93.8 | 51.5 | |
To investigate the impact of reward model capacity, we vary the size of the ReasonFlux-PRM model used to provide rewards for GRPO-based policy optimization. As shown in Table 6, using a larger ReasonFlux-PRM model consistently improves performance across both policy models, Qwen2.5-7B-Instruct and DeepSeek-R1-Distill-Qwen-7B. Specifically, scaling ReasonFlux-PRM from 1.5B to 7B leads to a 3.8% gain on MATH500 and 3.5% on GPQA-Diamond for Qwen2.5-7B-Instruct. Likewise, for DeepSeek-R1-Distill-Qwen-7B, we observe a 3.4% improvement on MATH500 and 3.0% on GPQA-Diamond. These results indicate that larger reward models provide more accurate and informative signals for RL, thereby enabling stronger policy optimization.
### D.2 End-to-End Training with ReasonFlux-PRM (SFT+RL)
Table 7: Effect of ReasonFlux-PRM-7B selected supervised fine-tuning on downstream RL. We compare the original backbone model (Checkpoint 1) and the model fine-tuned on 1k ReasonFlux-PRM-7B selected data (Checkpoint 2), each evaluated under different reward signal sources.
| Policy Model (Qwen2.5-7B-Instruct) | Reward Signal Source | MATH500 |
| --- | --- | --- |
| Checkpoint 1: Original backbone model | Rule-based | 74.0 |
| Qwen2.5-Math-PRM-7B | 75.4 | |
| ReasonFlux-PRM-7B | 77.0 | |
| Checkpoint 2: SFT on 1k ReasonFlux-PRM-7B selected data | Rule-based | 84.8 |
| Qwen2.5-Math-PRM-7B | 87.6 | |
| ReasonFlux-PRM-7B | 89.8 | |
As supervised fine-tuning followed by reinforcement learning (SFT+RL) has become a dominant paradigm for aligning large language models with reasoning-intensive tasks, we are motivated to evaluate if ReasonFlux-PRM can serve as a general-purpose reward model to be effectively applied across both stages of training. Table 7 presents a comparative analysis on the Qwen2.5-7B-Instruct policy model, where we evaluate two checkpoints: (i) the original backbone model, and (ii) the same model after SFT on 1k ReasonFlux-PRM-7B selected data over the 59K raw data in s1 [13]. Both checkpoints are then further optimized with different reward signal sources during RL. The results demonstrate that ReasonFlux-PRM-7B consistently improves downstream performance at SFT and RL stages. We also observe that across all reward signal sources, fine-tuning on 1k ReasonFlux-PRM-7B selected data consistently improves performance over the original backbone model. Notably, the combination of ReasonFlux-PRM-7B based supervised fine-tuning and ReasonFlux-PRM-7B guided reinforcement learning yields the highest MATH500 accuracy of 89.8%, with a significant 12.8% accuracy improvement compared to the original backbone model (77.0%). These results highlight the end-to-end effectiveness of ReasonFlux-PRM as a general reward model for enhancing reasoning capabilities throughout the full training pipeline.
## Appendix E Case Study on ReasonFlux-PRM
In Case Studies 1 and 2 below, we present two responses to the same mathematical problem, one incorrect and one correct. For each response, we show the step-level and trajectory-level rewards assigned by ReasonFlux-PRM-7B. In the incorrect response, ReasonFlux-PRM-7B effectively identifies the point at which the reasoning begins to deviate by assigning significantly lower rewards to the subsequent steps. In contrast, the correct response receives consistently high rewards throughout the trajectory. Our study on the example suggests that ReasonFlux-PRM is not only capable of distinguishing between correct and incorrect solutions but also of pinpointing the precise step where an error in reasoning occurs.
## Appendix F Limitations and Broader Impacts
Limitations While ReasonFlux-PRM demonstrates robust improvements in reasoning quality across diverse mathematical and scientific benchmarks, one limitation lies in its reliance on high-quality trajectory–response pairs for training. Although ReasonFlux-PRM is designed to be general-purpose and adaptable, its current instantiation is tailored toward domains with well-structured logic (e.g., math and science), where reward signals based on alignment, quality, and coherence can be meaningfully computed. Applying ReasonFlux-PRM in more open-ended tasks such as commonsense dialogue or code generation may require redefining trajectory-level reward criteria and further tuning of the reward decomposition strategy. However, these domains fall outside the scope of this work and do not detract from the validity or strength of our conclusions in the reasoning-focused setting.
Broader Impact This paper introduces ReasonFlux-PRM, a trajectory-aware reward modeling framework that advances LLM reasoning by providing fine-grained supervision over both intermediate thinking steps and high-level solution strategies. This improves LLM alignment, interpretability, and efficiency in structured reasoning tasks such as math and science, while supporting both supervised fine-tuning and reinforcement learning. While our work has broad implications, we do not foresee significant negative impacts or societal concerns that warrant specific emphasis.
Case Study 1
Question: If $-6\leq a\leq-2$ and $3\leq b\leq 5$ , what is the greatest possible value of $\displaystyle\left(a+\frac{1}{b}\right)\left(\frac{1}{b}-a\right)$ ? Thinking Trajectories: The problem asks for the greatest possible value of the expression $\displaystyle\left(a+\frac{1}{b}\right)\left(\frac{1}{b}-a\right)$ given the ranges for $a$ and $b$ . [Step-level reward: 0.997] First, let’s expand the expression: $\displaystyle\left(a+\frac{1}{b}\right)\left(\frac{1}{b}-a\right)=a\left(\frac{1}{b}-a\right)+\frac{1}{b}\left(\frac{1}{b}-a\right)$ $=a\cdot\frac{1}{b}-a^{2}+\frac{1}{b}\cdot\frac{1}{b}-\frac{1}{b}\cdot a$ $=\frac{a}{b}-a^{2}+\frac{1}{b^{2}}-\frac{a}{b}$ $=-a^{2}+\frac{1}{b^{2}}$ [Step-level reward: 0.983] Now we need to find the maximum value of $-a^{2}+\frac{1}{b^{2}}$ given the constraints $-6\leq a\leq-2$ and $3\leq b\leq 5$ . [Step-level reward: 0.996] Consider the terms $-a^{2}$ and $\frac{1}{b^{2}}$ separately. Since $-6\leq a\leq-2$ , we have $0\leq(-a)^{2}\leq(-(-6))^{2}=36$ . Therefore, $-36\leq-a^{2}\leq-4$ . [Step-level reward: 0.503] Since $3\leq b\leq 5$ , we have $9\leq b^{2}\leq 25$ . Therefore, $\frac{1}{25}\leq\frac{1}{b^{2}}\leq\frac{1}{9}$ . [Step-level reward: 0.895] We want to maximize $-a^{2}+\frac{1}{b^{2}}$ . This is equivalent to minimizing $-a^{2}$ and maximizing $\frac{1}{b^{2}}$ . [Step-level reward: 0.297] (This is the place where the thinking trajectory went wrong, because in order to maximize $-a^{2}+\frac{1}{b^{2}}$ , $-a^{2}$ needs to be maximized, not minimized. ReasonFlux-PRM assigns low reward starting from this segment within the thinking trajectory, which indicates that ReasonFlux-PRM is able to identify errors in reasoning traces.) The minimum value of $-a^{2}$ is $-36$ . The maximum value of $\frac{1}{b^{2}}$ is $\frac{1}{9}$ . [Step-level reward: 0.238] (The step-level rewards drop significantly since the last wrong step.) So the greatest possible value of $-a^{2}+\frac{1}{b^{2}}$ is $-36+\frac{1}{9}$ . Let’s calculate this value: $-36+\frac{1}{9}=-\frac{36\times 9}{9}+\frac{1}{9}=-\frac{324}{9}+\frac{1}{9}=-\frac{324-1}{9}=-\frac{323}{9}$ [Step-level reward: 0.280] Final Response: Given the ranges $-6\leq a\leq-2$ and $3\leq b\leq 5$ . We want to find the greatest possible value of the expression $\displaystyle\left(a+\frac{1}{b}\right)\left(\frac{1}{b}-a\right)$ . [Step-level reward: 0.995] First, we expand the expression: $\left(a+\frac{1}{b}\right)\left(\frac{1}{b}-a\right)=a\left(\frac{1}{b}-a\right)+\frac{1}{b}\left(\frac{1}{b}-a\right)$ $=a\cdot\frac{1}{b}-a^{2}+\frac{1}{b}\cdot\frac{1}{b}-\frac{1}{b}\cdot a$ $=\frac{a}{b}-a^{2}+\frac{1}{b^{2}}-\frac{a}{b}$ $=-a^{2}+\frac{1}{b^{2}}$ [Step-level reward: 0.997] Now we need to find the maximum value of $-a^{2}+\frac{1}{b^{2}}$ given the constraints for $a$ and $b$ . Consider the term $-a^{2}$ . Since $-6\leq a\leq-2$ , the values of $a^{2}$ range from $(-6)^{2}=36$ to $(-2)^{2}=4$ . Therefore, the values of $-a^{2}$ range from $-36$ to $-4$ . [Step-level reward: 0.988] Consider the term $\frac{1}{b^{2}}$ . Since $3\leq b\leq 5$ , the values of $b^{2}$ range from $3^{2}=9$ to $5^{2}=25$ . Therefore, the values of $\frac{1}{b^{2}}$ range from $\frac{1}{25}$ to $\frac{1}{9}$ . [Step-level reward: 0.897] To maximize $-a^{2}+\frac{1}{b^{2}}$ , we need to maximize $\frac{1}{b^{2}}$ and minimize $-a^{2}$ . The maximum value of $\frac{1}{b^{2}}$ is $\frac{1}{9}$ , which occurs when $b=3$ . The minimum value of $-a^{2}$ is $-36$ , which occurs when $a=-6$ . [Step-level reward: 0.108] (The low score here aligns with the low score in the model thinking trajectories.) Thus, the greatest possible value of $-a^{2}+\frac{1}{b^{2}}$ is $-36+\frac{1}{9}$ . $-36+\frac{1}{9}=-\frac{36\times 9}{9}+\frac{1}{9}=-\frac{324}{9}+\frac{1}{9}=-\frac{324-1}{9}=-\frac{323}{9}$ Final Answer: The final answer is $\boxed{-\frac{323}{9}}$ [Step-level reward: 0.319] [Trajectory-level reward: 0.197] (As the final answer is incorrect, ReasonFlux-PRM assigns a low trajectory-level reward to the overall trajectory-response data.)
Case Study 2
Question: If $-6\leq a\leq-2$ and $3\leq b\leq 5$ , what is the greatest possible value of $\displaystyle\left(a+\frac{1}{b}\right)\left(\frac{1}{b}-a\right)$ ? Thinking Trajectories: The problem asks for the greatest possible value of the expression $\displaystyle\left(a+\frac{1}{b}\right)\left(\frac{1}{b}-a\right)$ given the ranges for $a$ and $b$ . [Step-level reward: 0.998] Let $E=\left(a+\frac{1}{b}\right)\left(\frac{1}{b}-a\right)$ . We can expand the expression: $E=a\left(\frac{1}{b}\right)+a\left(-a\right)+\frac{1}{b}\left(\frac{1}{b}\right)+\frac{1}{b}\left(-a\right)$ $E=\frac{a}{b}-a^{2}+\frac{1}{b^{2}}-\frac{a}{b}$ $E=-a^{2}+\frac{1}{b^{2}}$ [Step-level reward: 0.985] We need to find the maximum value of $E$ given the constraints $-6\leq a\leq-2$ and $3\leq b\leq 5$ . [Step-level reward: 0.998] Since $E=-a^{2}+\frac{1}{b^{2}}$ , we need to minimize $a^{2}$ and maximize $\frac{1}{b^{2}}$ . [Step-level reward: 0.974] For $a$ , the range is $-6\leq a\leq-2$ . The minimum value of $a^{2}$ occurs when $a$ is closest to 0. The values of $a$ are negative, so the minimum value of $a^{2}$ occurs when $a$ is the least negative, which is $-2$ . When $a=-2$ , $a^{2}=(-2)^{2}=4$ . [Step-level reward: 0.962] For $b$ , the range is $3\leq b\leq 5$ . The maximum value of $\frac{1}{b^{2}}$ occurs when $b$ is the smallest. When $b=3$ , $\frac{1}{b^{2}}=\frac{1}{3^{2}}=\frac{1}{9}$ . [Step-level reward: 0.985] So, the maximum value of $E$ occurs when $a^{2}$ is minimized and $\frac{1}{b^{2}}$ is maximized. Maximum $E=-a^{2}+\frac{1}{b^{2}}=-4+\frac{1}{9}$ . [Step-level reward: 0.818] To add these values, we need a common denominator: Maximum $E=-4+\frac{1}{9}=-\frac{4\times 9}{9}+\frac{1}{9}=-\frac{36}{9}+\frac{1}{9}=-\frac{36-1}{9}=-\frac{35}{9}$ . [Step-level reward: 0.815] Let’s double check the calculations. The expression is $\left(a+\frac{1}{b}\right)\left(\frac{1}{b}-a\right)$ . Expand the expression: $a\cdot\frac{1}{b}+a\cdot(-a)+\frac{1}{b}\cdot\frac{1}{b}+\frac{1}{b}\cdot(-a)$ $=\frac{a}{b}-a^{2}+\frac{1}{b^{2}}-\frac{a}{b}$ $=-a^{2}+\frac{1}{b^{2}}$ [Step-level reward: 0.980] We want to maximize $-a^{2}+\frac{1}{b^{2}}$ . Since $a^{2}\geq 0$ , $-a^{2}\leq 0$ . Since $b^{2}>0$ , $\frac{1}{b^{2}}>0$ . The maximum value of $\frac{1}{b^{2}}$ is $\frac{1}{3^{2}}=\frac{1}{9}$ , which occurs when $b=3$ . We need to find the minimum value of $a^{2}$ in the range $[-6,-2]$ . The minimum value of $a^{2}$ occurs at the boundary of the interval, which is $a=-2$ . When $a=-2$ , $a^{2}=(-2)^{2}=4$ . [Step-level reward: 0.927] We need to maximize $\frac{1}{b^{2}}$ in the range $[3,5]$ . The maximum value of $\frac{1}{b^{2}}$ occurs at the boundary of the interval, which is $b=3$ . When $b=3$ , $\frac{1}{b^{2}}=\frac{1}{3^{2}}=\frac{1}{9}$ . [Step-level reward: 0.989] So the maximum value of the expression is $-a^{2}+\frac{1}{b^{2}}=-4+\frac{1}{9}=-\frac{36}{9}+\frac{1}{9}=-\frac{35}{9}$ . Final Response: Given the ranges for $a$ and $b$ : $-6\leq a\leq-2$ $3\leq b\leq 5$ [Step-level reward: 0.958] We want to find the greatest possible value of the expression $\displaystyle\left(a+\frac{1}{b}\right)\left(\frac{1}{b}-a\right)$ . [Step-level reward: 0.999] First, we expand the expression: $\left(a+\frac{1}{b}\right)\left(\frac{1}{b}-a\right)=a\left(\frac{1}{b}\right)+a\left(-a\right)+\frac{1}{b}\left(\frac{1}{b}\right)+\frac{1}{b}\left(-a\right)$ $=\frac{a}{b}-a^{2}+\frac{1}{b^{2}}-\frac{a}{b}$ $=-a^{2}+\frac{1}{b^{2}}$ [Step-level reward: 0.998] To find the greatest possible value of this expression, we need to minimize $a^{2}$ and maximize $\frac{1}{b^{2}}$ . [Step-level reward: 0.987] For the term $-a^{2}$ , we want to minimize $a^{2}$ . Since $a^{2}\geq 0$ for all real numbers $a$ , the minimum value of $a^{2}$ occurs when $a=0$ . However, the given range for $a$ is $[-6,-2]$ , so $a=0$ is not within the range. The minimum value of $a^{2}$ in the given range occurs at the boundary of the interval, which is $a=-2$ . When $a=-2$ , $a^{2}=(-2)^{2}=4$ . [Step-level reward: 0.967] For the term $\frac{1}{b^{2}}$ , we want to maximize $\frac{1}{b^{2}}$ . Since $b^{2}>0$ for all real numbers $b\neq 0$ , the maximum value of $\frac{1}{b^{2}}$ occurs when $b^{2}$ is the smallest. The smallest value of $b^{2}$ in the given range occurs when $b$ is the largest in absolute value within the interval $[3,5]$ , which is $b=3$ . When $b=3$ , $b^{2}=3^{2}=9$ , and $\frac{1}{b^{2}}=\frac{1}{9}$ . [Step-level reward: 0.667] Now, we substitute the minimum value of $a^{2}$ and the maximum value of $\frac{1}{b^{2}}$ into the expanded expression: $-a^{2}+\frac{1}{b^{2}}=-4+\frac{1}{9}$ To combine these terms, we find a common denominator: $-4+\frac{1}{9}=-\frac{4\times 9}{9}+\frac{1}{9}=-\frac{36}{9}+\frac{1}{9}=-\frac{36-1}{9}=-\frac{35}{9}$ [Step-level reward: 0.993] Thus, the greatest possible value of the given expression is $-\frac{35}{9}$ . [Step-level reward: 0.988] Final Answer: The final answer is $\boxed{-\frac{35}{9}}$ [Step-level reward: 0.999] [Trajectory-level reward: 0.949] (As the final answer is correct, ReasonFlux-PRM assigns a high trajectory-level reward to the overall trajectory-response data.)